首先需要将yolov8/yolov11的pt文件转为onnx文件
python
from ultralytics import YOLO
model = YOLO("best.pt")
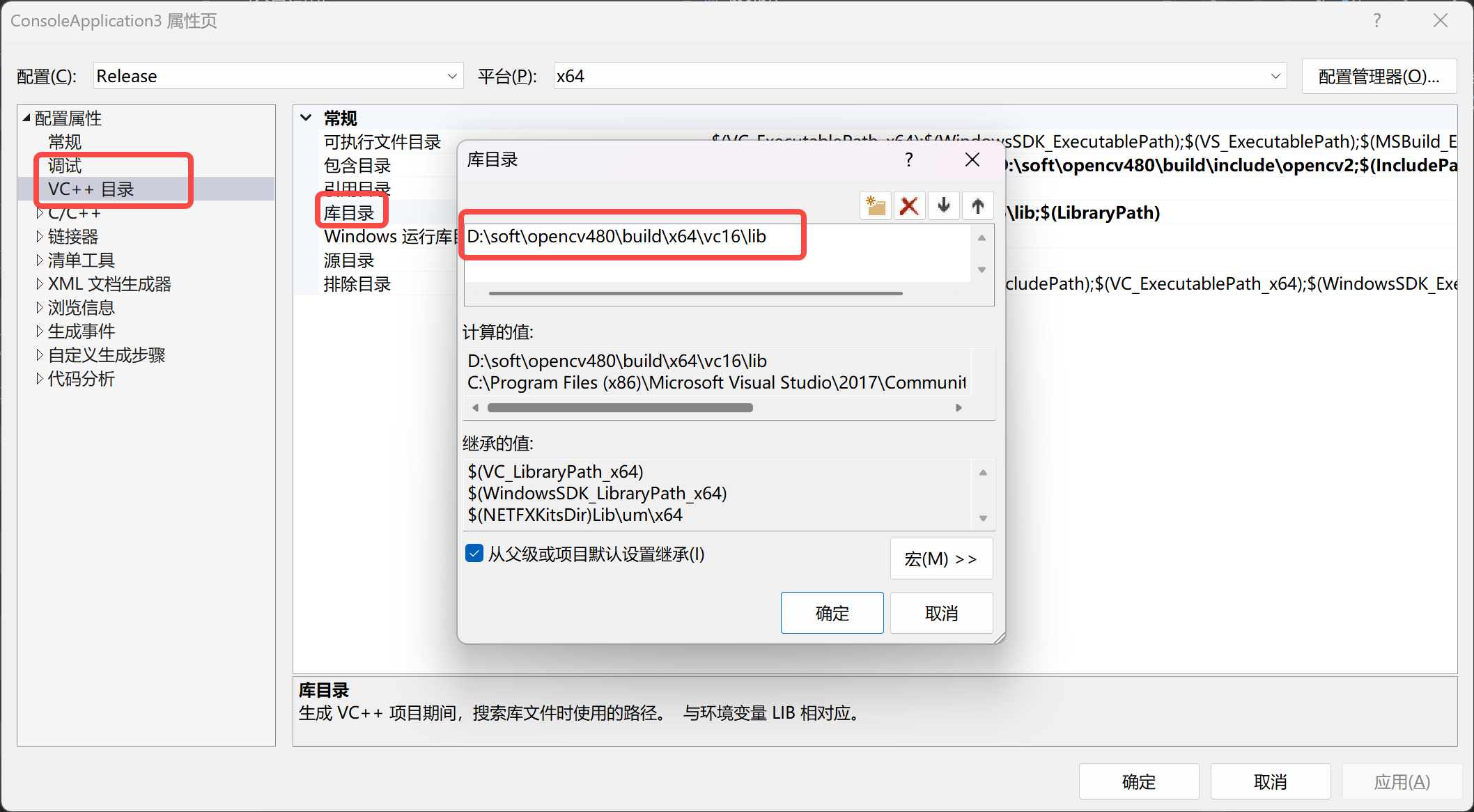
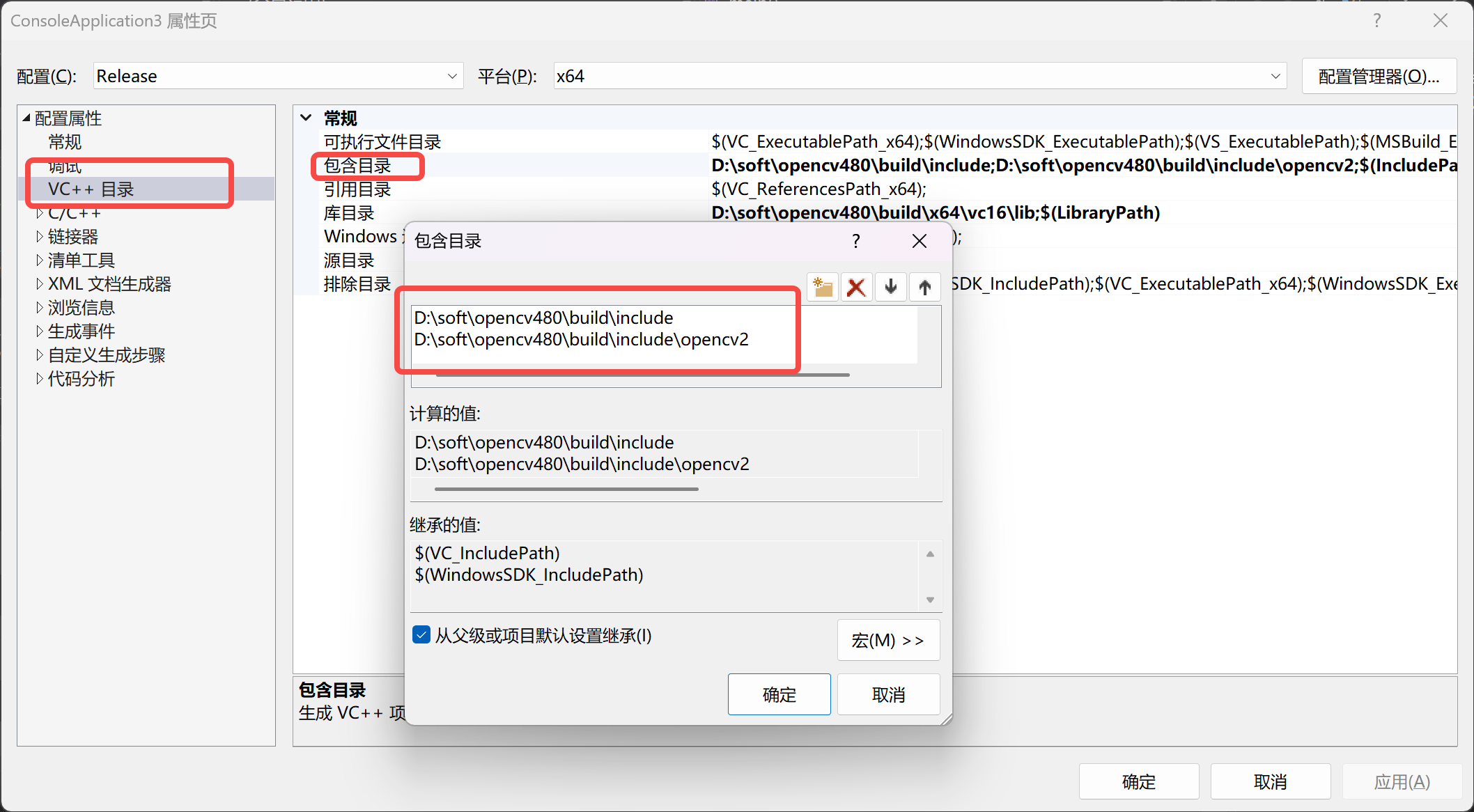
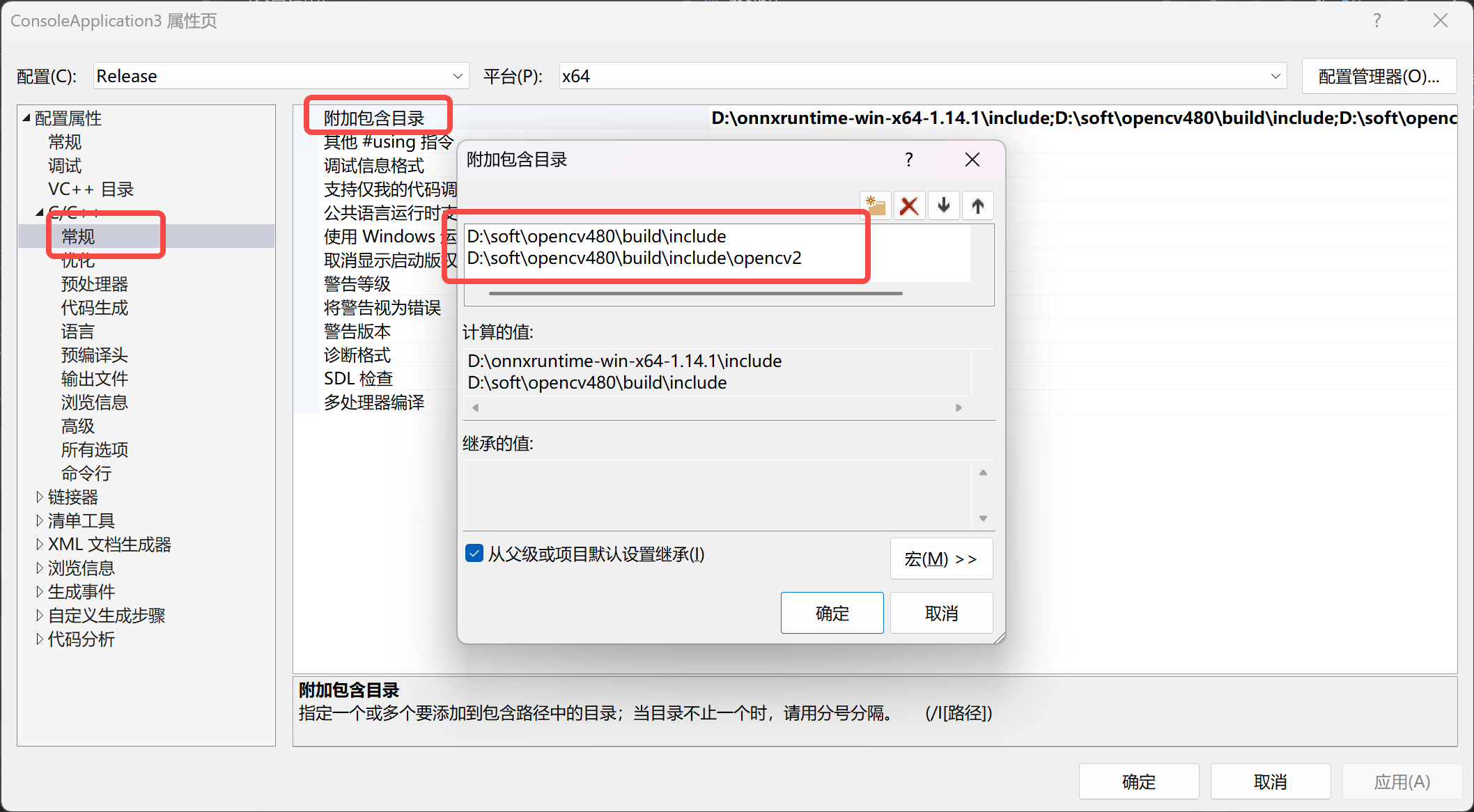
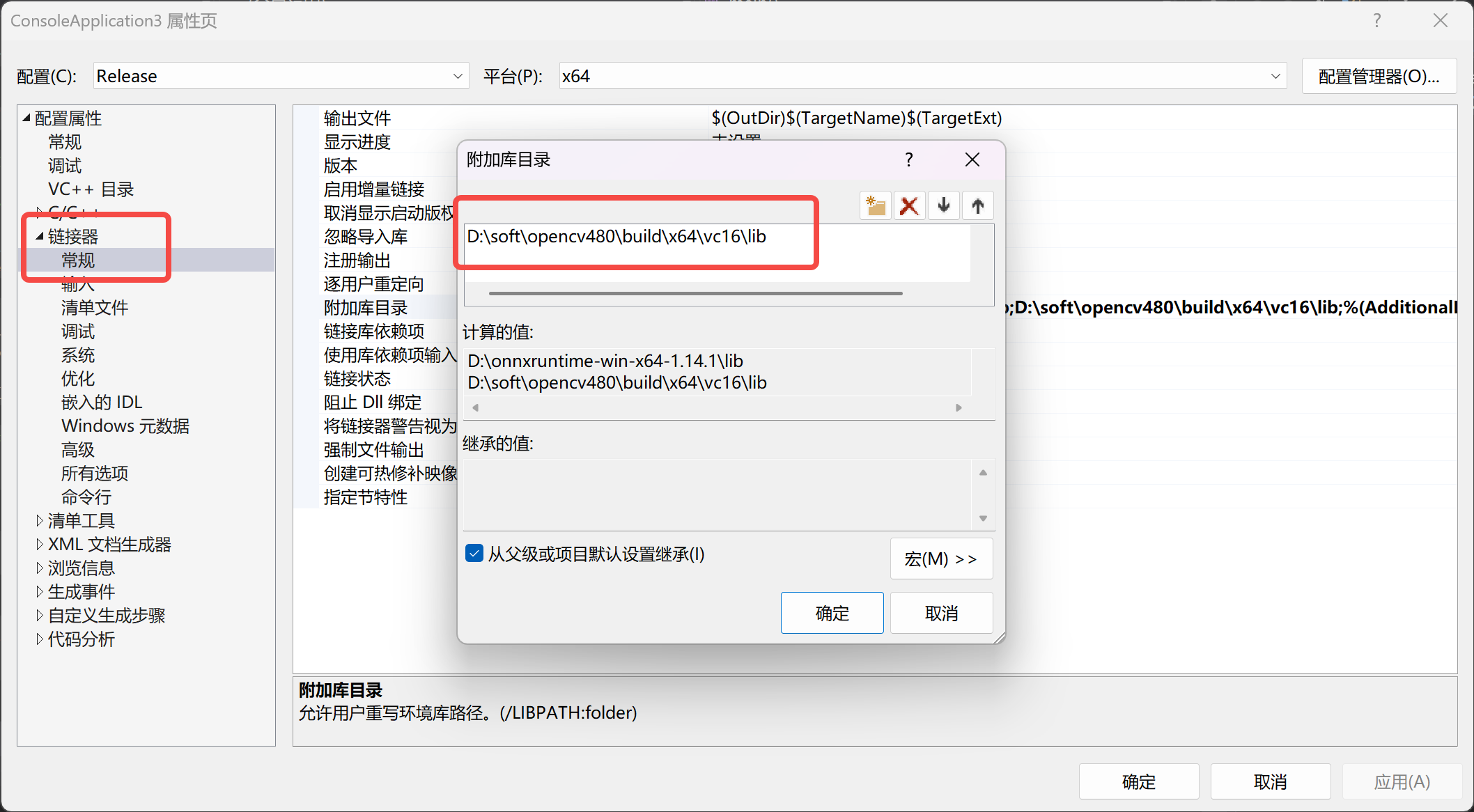
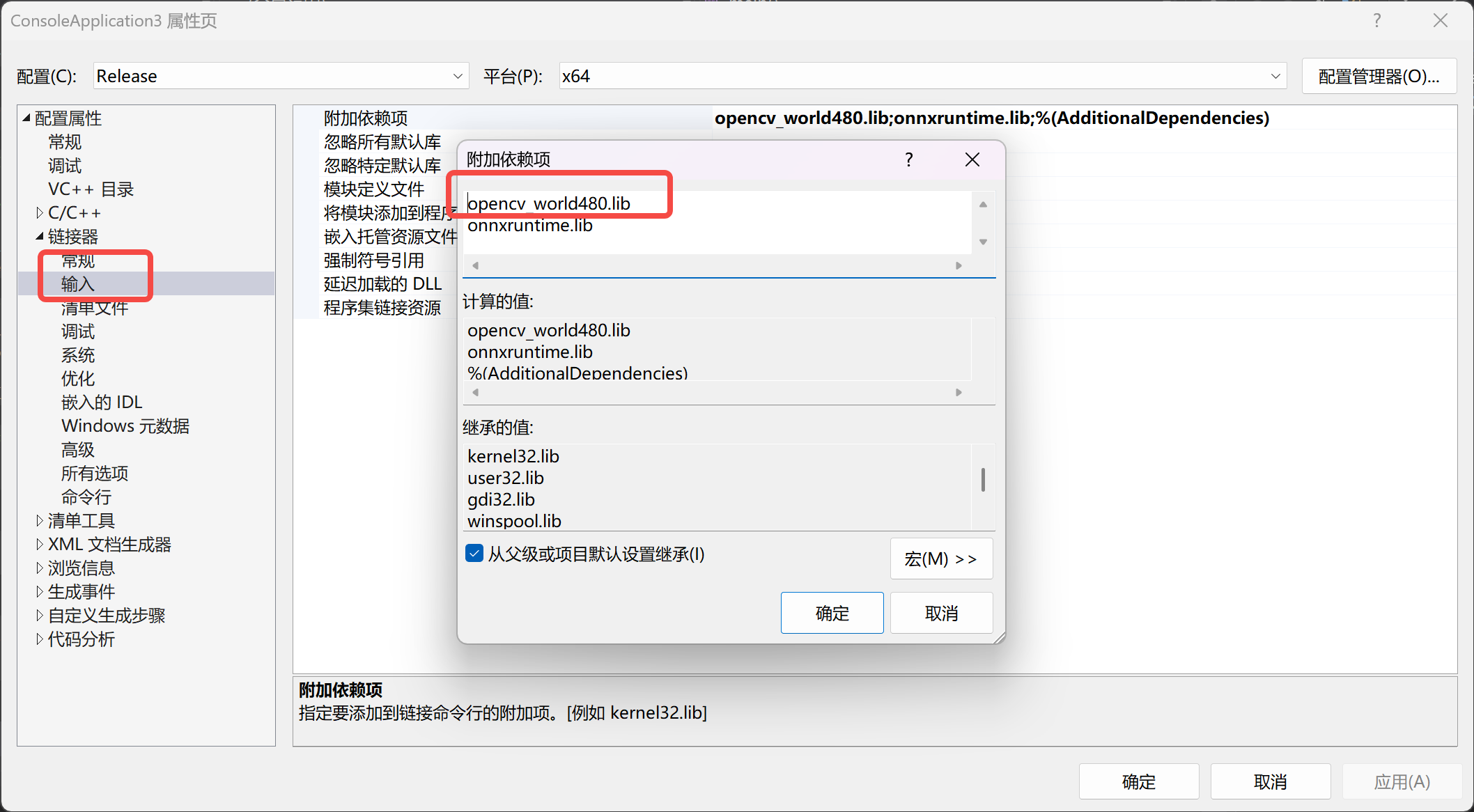
model.export(format="onnx",opset=11,dynamic=False)本次C++工具使用vs2017,需要下载OpenCV包:https://opencv.org/releases/,下在windows包即可,本次代码opencv4.7.0和opencv4.8.0均正常运行,下载好后跟着下面的步骤进行配置。
cpp
#include <opencv2/opencv.hpp>
#include <opencv2/dnn.hpp>
#include <iostream>
#include <vector>
#include <string>
#include <random>
#include <chrono>
#include <fstream>
using namespace cv;
using namespace cv::dnn;
using namespace std;
using namespace chrono;
class YOLO {
private:
float confidenceThreshold;
float iouThreshold;
Net net;
int inputHeight;
int inputWidth;
vector<string> classes;
vector<Scalar> colors;
// 初始化类别
void initClasses() {
classes = { "black", "cue", "solid", "stripe" };//填入你需要的类别
}
// 生成随机颜色
void initColors() {
random_device rd;
mt19937 gen(rd());
uniform_int_distribution<int> dist(0, 255);
for (size_t i = 0; i < classes.size(); ++i) {
colors.push_back(Scalar(dist(gen), dist(gen), dist(gen)));
}
}
public:
// 构造函数
YOLO(const string& onnxModelPath, float confThreshold = 0.5f, float iouThreshold = 0.5f)
: confidenceThreshold(confThreshold), iouThreshold(iouThreshold),
inputHeight(640), inputWidth(640) { //默认640,640
try {
// 加载模型
net = readNetFromONNX(onnxModelPath);
if (net.empty()) {
throw runtime_error("无法加载ONNX模型: " + onnxModelPath);
}
// 设置计算后端和目标设备
net.setPreferableBackend(DNN_BACKEND_OPENCV);
net.setPreferableTarget(DNN_TARGET_CPU);
// 初始化类别和颜色
initClasses();
initColors();
// 打印网络信息
vector<String> layerNames = net.getLayerNames();
vector<String> outputNames = net.getUnconnectedOutLayersNames();
cout << "模型加载成功!" << endl;
cout << "输入尺寸: " << inputWidth << "x" << inputHeight << endl;
cout << "网络层数: " << layerNames.size() << endl;
cout << "输出层数: " << outputNames.size() << endl;
for (size_t i = 0; i < outputNames.size(); i++) {
cout << "输出层[" << i << "]: " << outputNames[i] << endl;
}
}
catch (const Exception& e) {
cerr << "初始化YOLOv8失败: " << e.what() << endl;
throw;
}
}
// 预处理图像
Mat preprocess(const Mat& image) {
Mat blob;
// 创建blob,BGR->RGB,归一化到[0,1]
blobFromImage(image, blob, 1.0 / 255.0, Size(inputWidth, inputHeight), Scalar(), true, false, CV_32F);
return blob;
}
// 输出张量信息用于调试
void printTensorInfo(const Mat& tensor, const string& name) {
cout << name << " 信息:" << endl;
cout << " 维度: " << tensor.dims << endl;
cout << " 形状: [";
for (int i = 0; i < tensor.dims; i++) {
cout << tensor.size[i];
if (i < tensor.dims - 1) cout << ", ";
}
cout << "]" << endl;
cout << " 类型: " << tensor.type() << endl;
cout << " 总元素数: " << tensor.total() << endl;
}
// 后处理
void postprocess(const Mat& image, const vector<Mat>& outputs,
vector<Rect>& boxes, vector<float>& confidences, vector<int>& classIds) {
boxes.clear();
confidences.clear();
classIds.clear();
if (outputs.empty()) {
cerr << "错误: 模型输出为空" << endl;
return;
}
int imageHeight = image.rows;
int imageWidth = image.cols;
// 打印所有输出的信息
for (size_t i = 0; i < outputs.size(); i++) {
printTensorInfo(outputs[i], "输出[" + to_string(i) + "]");
}
// 获取第一个输出
Mat output = outputs[0];
// 确保输出是浮点型
if (output.type() != CV_32F) {
output.convertTo(output, CV_32F);
}
int numClasses = classes.size();
int numDetections = 0;
int featuresPerDetection = 0;
// 处理不同维度的输出
Mat processedOutput;
if (output.dims == 3) {
// 3维输出: [batch, features, detections] 或 [batch, detections, features]
int dim1 = output.size[1];
int dim2 = output.size[2];
cout << "处理3维输出: [" << output.size[0] << ", " << dim1 << ", " << dim2 << "]" << endl;
// 判断格式
if (dim1 == numClasses + 4) {
// 格式: [1, 8, 8400] -> 转换为 [8400, 8]
numDetections = dim2;
featuresPerDetection = dim1;
processedOutput = Mat::zeros(numDetections, featuresPerDetection, CV_32F);
// 手动转置数据
for (int i = 0; i < numDetections; i++) {
for (int j = 0; j < featuresPerDetection; j++) {
// 安全地访问3D张量数据
const float* data = output.ptr<float>(0);
int index = j * numDetections + i;
processedOutput.at<float>(i, j) = data[index];
}
}
}
else if (dim2 == numClasses + 4) {
// 格式: [1, 8400, 8] -> 直接重塑为 [8400, 8]
numDetections = dim1;
featuresPerDetection = dim2;
// 创建2D视图
processedOutput = Mat(numDetections, featuresPerDetection, CV_32F,
(void*)output.ptr<float>(0));
}
else {
cerr << "无法识别的3D输出格式" << endl;
return;
}
}
else if (output.dims == 2) {
// 2维输出: [detections, features]
cout << "处理2维输出: [" << output.size[0] << ", " << output.size[1] << "]" << endl;
numDetections = output.size[0];
featuresPerDetection = output.size[1];
processedOutput = output;
}
else {
cerr << "不支持的输出维度: " << output.dims << endl;
return;
}
cout << "处理格式: " << numDetections << " 个检测, 每个 " << featuresPerDetection << " 个特征" << endl;
// 检查特征数量是否正确
if (featuresPerDetection != numClasses + 4) {
cerr << "警告: 特征数量(" << featuresPerDetection << ")与期望值(" << numClasses + 4 << ")不匹配" << endl;
}
float x_factor = float(imageWidth) / float(inputWidth);
float y_factor = float(imageHeight) / float(inputHeight);
// 处理每个检测
for (int i = 0; i < numDetections; ++i) {
const float* detection = processedOutput.ptr<float>(i);
// 前4个值是边界框坐标 [cx, cy, w, h]
float cx = detection[0];
float cy = detection[1];
float w = detection[2];
float h = detection[3];
// 找到最高分的类别
float maxScore = 0;
int classId = -1;
int availableClasses = min(numClasses, featuresPerDetection - 4);
for (int j = 0; j < availableClasses; ++j) {
float score = detection[4 + j];
if (score > maxScore) {
maxScore = score;
classId = j;
}
}
// 过滤低置信度
if (maxScore > confidenceThreshold && classId >= 0 && classId < numClasses) {
// 转换坐标:中心点坐标转换为左上角坐标
float x1 = (cx - w / 2) * x_factor;
float y1 = (cy - h / 2) * y_factor;
float width = w * x_factor;
float height = h * y_factor;
// 确保边界框在图像范围内
x1 = max(0.0f, x1);
y1 = max(0.0f, y1);
width = min(width, float(imageWidth) - x1);
height = min(height, float(imageHeight) - y1);
if (width > 0 && height > 0) {
boxes.push_back(Rect(int(x1), int(y1), int(width), int(height)));
confidences.push_back(maxScore);
classIds.push_back(classId);
}
}
}
cout << "NMS前检测到 " << boxes.size() << " 个候选框" << endl;
// 非极大值抑制
vector<int> indices;
if (!boxes.empty()) {
NMSBoxes(boxes, confidences, confidenceThreshold, iouThreshold, indices);
}
// 应用NMS结果
vector<Rect> tempBoxes;
vector<float> tempConfidences;
vector<int> tempClassIds;
for (int i : indices) {
tempBoxes.push_back(boxes[i]);
tempConfidences.push_back(confidences[i]);
tempClassIds.push_back(classIds[i]);
}
boxes = tempBoxes;
confidences = tempConfidences;
classIds = tempClassIds;
cout << "NMS后保留 " << boxes.size() << " 个检测框" << endl;
}
// 绘制检测结果
void drawDetections(Mat& image, const vector<Rect>& boxes,
const vector<float>& confidences, const vector<int>& classIds) {
for (size_t i = 0; i < boxes.size(); ++i) {
Rect box = boxes[i];
int classId = classIds[i];
if (classId >= 0 && classId < colors.size()) {
Scalar color = colors[classId];
// 绘制边界框
rectangle(image, box, color, 2);
// 绘制类别和置信度
string label = classes[classId] + ": " +
to_string(int(confidences[i] * 100)) + "%";
// 计算文本尺寸
int baseline;
Size textSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseline);
// 绘制文本背景
rectangle(image,
Point(box.x, box.y - textSize.height - 10),
Point(box.x + textSize.width, box.y),
color, FILLED);
// 绘制文本
putText(image, label, Point(box.x, box.y - 5),
FONT_HERSHEY_SIMPLEX, 0.5, Scalar(255, 255, 255), 1);
}
}
}
// 执行检测
void detect(Mat& image, Mat& resultImage,
vector<Rect>& boxes, vector<float>& confidences, vector<int>& classIds) {
try {
// 预处理
cout << "开始预处理..." << endl;
Mat blob = preprocess(image);
cout << "预处理完成: [" << blob.size[0] << ", " << blob.size[1]
<< ", " << blob.size[2] << ", " << blob.size[3] << "]" << endl;
// 设置输入
net.setInput(blob);
// 方法1: 使用简单的forward()方法
cout << "开始推理(方法1)..." << endl;
auto start = high_resolution_clock::now();
try {
Mat output = net.forward();
auto end = high_resolution_clock::now();
vector<Mat> outputs;
outputs.push_back(output);
// 计算推理时间
duration<double> inferenceTime = end - start;
cout << "推理完成,耗时: " << inferenceTime.count() * 1000 << " 毫秒" << endl;
// 后处理
cout << "开始后处理..." << endl;
postprocess(image, outputs, boxes, confidences, classIds);
}
catch (const Exception& e1) {
cout << "方法1失败: " << e1.what() << endl;
// 方法2: 使用指定输出层名称的forward()方法
cout << "尝试方法2..." << endl;
try {
vector<String> outputNames = net.getUnconnectedOutLayersNames();
if (!outputNames.empty()) {
cout << "使用输出层: " << outputNames[0] << endl;
start = high_resolution_clock::now();
vector<Mat> outputs;
net.forward(outputs, outputNames);
auto end = high_resolution_clock::now();
duration<double> inferenceTime = end - start;
cout << "推理完成,耗时: " << inferenceTime.count() * 1000 << " 毫秒" << endl;
postprocess(image, outputs, boxes, confidences, classIds);
}
else {
throw runtime_error("无法获取输出层名称");
}
}
catch (const Exception& e2) {
cout << "方法2也失败: " << e2.what() << endl;
// 方法3: 使用所有输出层
cout << "尝试方法3..." << endl;
vector<int> outLayerIds = net.getUnconnectedOutLayers();
vector<String> layerNames = net.getLayerNames();
vector<String> outLayerNames;
for (int id : outLayerIds) {
outLayerNames.push_back(layerNames[id - 1]);
}
start = high_resolution_clock::now();
vector<Mat> outputs;
net.forward(outputs, outLayerNames);
auto end = high_resolution_clock::now();
duration<double> inferenceTime = end - start;
cout << "推理完成,耗时: " << inferenceTime.count() * 1000 << " 毫秒" << endl;
postprocess(image, outputs, boxes, confidences, classIds);
}
}
// 绘制结果
resultImage = image.clone();
drawDetections(resultImage, boxes, confidences, classIds);
cout << "最终检测到 " << boxes.size() << " 个目标" << endl;
}
catch (const Exception& e) {
cerr << "检测过程中出错: " << e.what() << endl;
resultImage = image.clone();
}
}
};
int main() {
try {
// 模型和图像路径
string onnxModelPath = "yolov8.onnx";//填入你需要的onnx权重文件
string imagePath = "test.jpg";//测试图片
// 检查文件是否存在
ifstream modelFile(onnxModelPath);
if (!modelFile.good()) {
cerr << "错误: 找不到模型文件 " << onnxModelPath << endl;
return -1;
}
// 初始化YOLOv8模型
cout << "初始化YOLOv8模型..." << endl;
YOLO yolo(onnxModelPath, 0.5f, 0.4f);
// 读取图像
Mat image = imread(imagePath);
if (image.empty()) {
cerr << "无法读取图像: " << imagePath << endl;
return -1;
}
cout << "图像尺寸: " << image.cols << "x" << image.rows << endl;
// 执行检测
Mat resultImage;
vector<Rect> boxes;
vector<float> confidences;
vector<int> classIds;
yolo.detect(image, resultImage, boxes, confidences, classIds);
// 显示结果
if (!resultImage.empty()) {
imshow("YOLOv8 Detection", resultImage);
cout << "按任意键继续..." << endl;
waitKey(0);
// 保存结果
imwrite("result.jpg", resultImage);
cout << "检测结果已保存为 result.jpg" << endl;
}
destroyAllWindows();
return 0;
}
catch (const exception& e) {
cerr << "程序异常: " << e.what() << endl;
return -1;
}
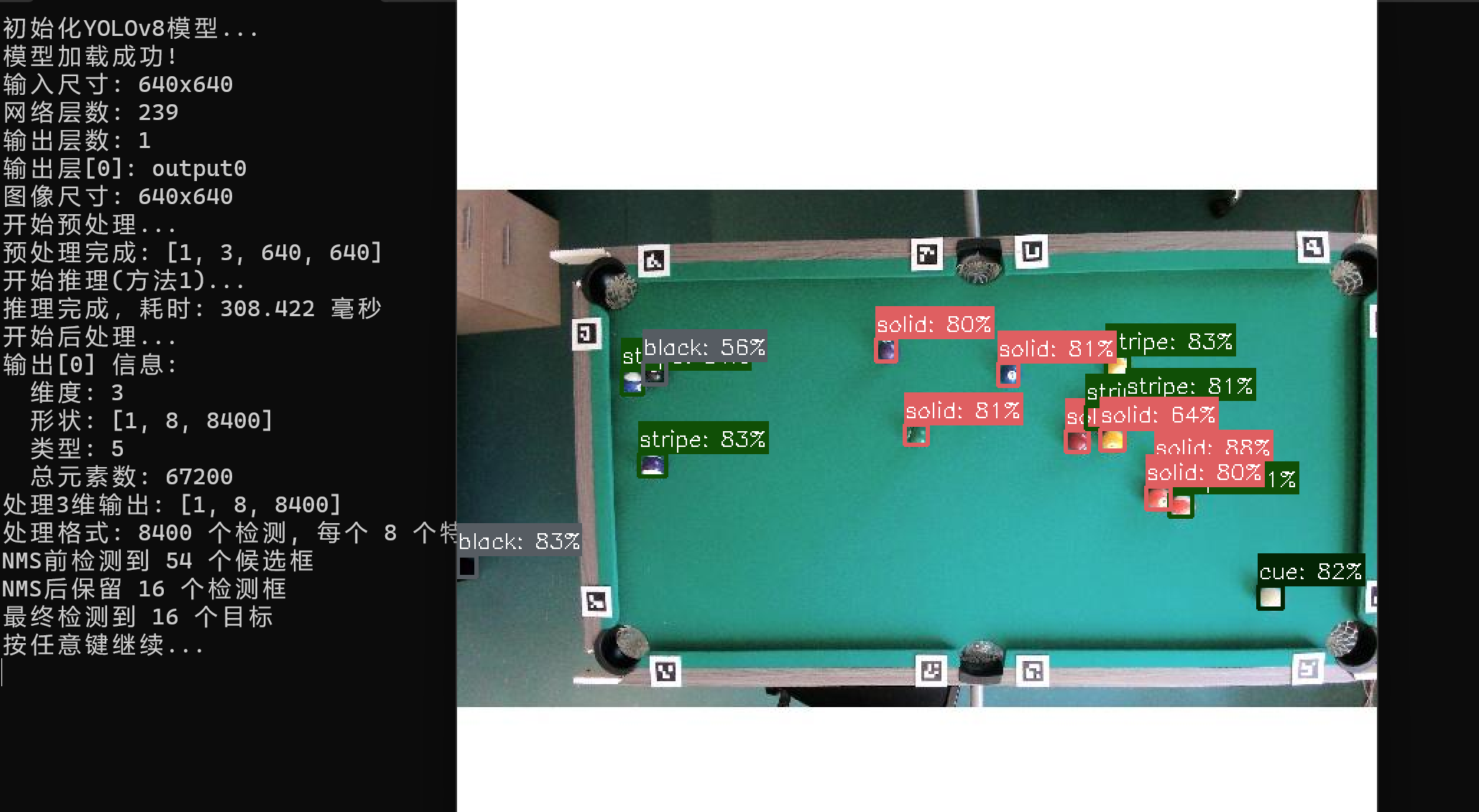
}运行结果: