1、自驾Camera开发的方案是否归一化
对于OEM,或者自驾方案商如Mobileye
如果进行Camera的开发,一般建议采用Tesla的系统化最优方案,所有Camera统一某个或者某两个MP设计(增加CIS议价权,减少Camera PCBA的设计维护数量),后续搭配不同的镜头得到不同应用的Camera。
对于Tier1,如Aptiv
Tier1在不同的OEM中,拿到的定点Camera需求都是不同的,也无法在同一家OEM,将所有的Camera定点都能拿到,所以Tier1采用的是Pixel与Camera应用功能结合,以达到单功能的Camera成本最优化设计。
如下表所示
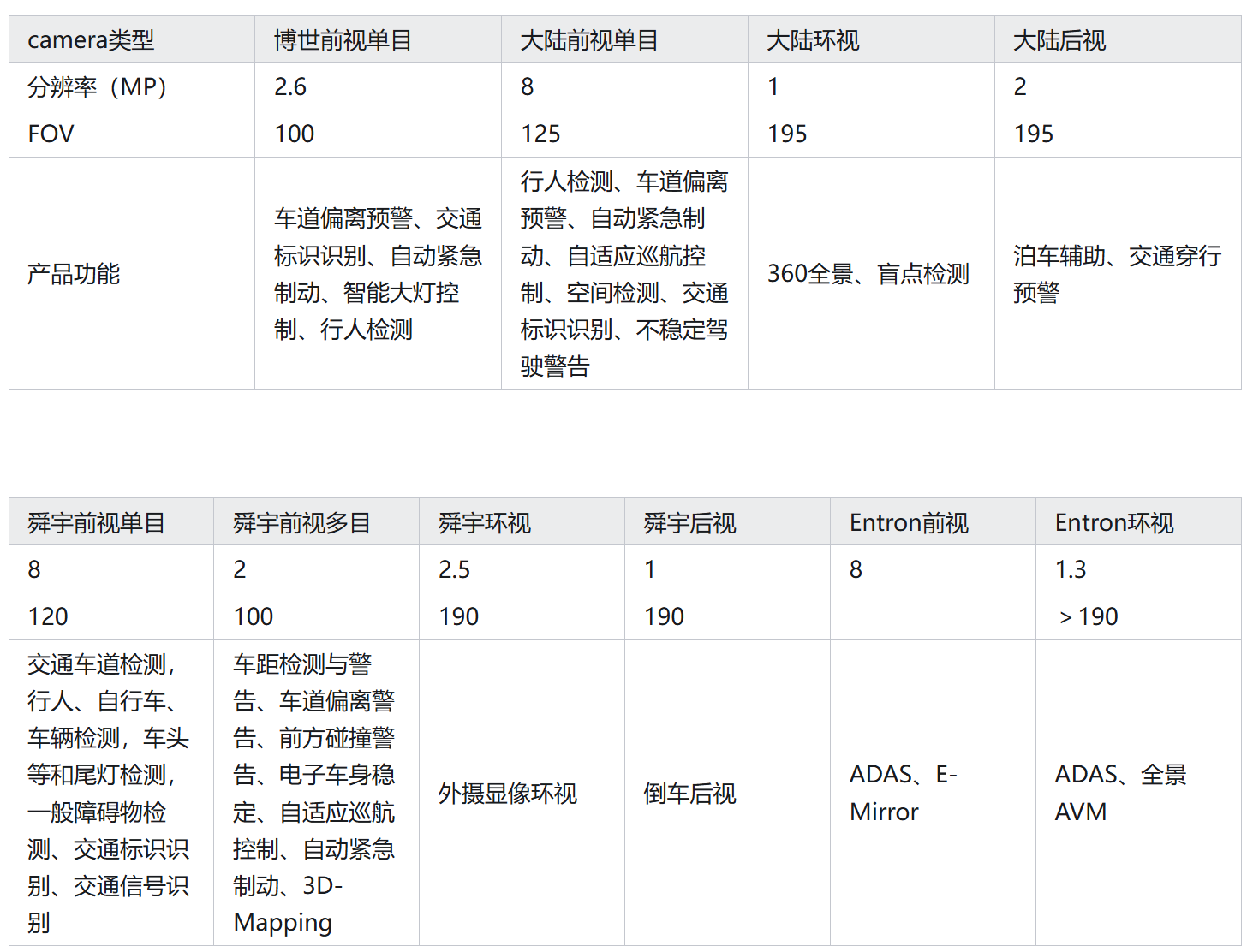
综上,Camera开发的技术路线如果选择统一CIS,后续配合不同的Lens得到不同应用的Camera。参考Tesla和Mobileye,这样会带来综合成本(单物料总量最大,维护物料品类最少)最优,以及对Serdes接口种类、ISP需求都会统一化,另外也会对后端感知算法的图片裁切统一化带来便利。
但是也存在挑战:需要和算法协调出一个最合适的Pixel值,以及和域控端的接口、算力等协调,最终确定一个适合的Pixel值,目前看似乎行业主流选择如下
行车全部8MP,泊车5MP或者3MP;或者前视后视8MP,其他都是为5MP或者3MP。
2、自驾Camera开发的成本问题
单独的CIS模块在以上技术方案的基础上还需要配合Serialier(Camera端)和Deserilizer(中央域控端),需要加上连接器和线缆的成本。
这块的成本又和CIS的像素相关,当前CIS的选择不会超过8MP,GMSL2 6Gbps/Lane可以支持该数据传输量。
挑战:Serdes成本过高,以及Serdes品类过多,是否可以协调,统一Pixel后,统一Serdes需求,同时Camera端的加串和域控端的解串统一议价;另外可以同APHY芯片的选取结合,在Serdes上以及车载Camera上带来数据率提升以及成本降低(相当于OEM增加了一倍的Serdes芯片采购量,具有更好的议价权,另外APHY芯片的供应商选择更多,也带来了供应商竞争降本)。
从APHY角度,可以实现Camera端的加串器供应商和中央域控端的解串器供应商解耦,增加了串行器供应商数量,可以实现竞争性的成本降低。
3、自驾Camera开发的适用性问题
未来自驾架构的发展需要满足:既要集成度提升(算力向域控集中),又要技术领先性,还要整体成本最低; 在传统的传感器架构下,以及传统的Tier1开发+OEM适配模式,是否还能满足未来自驾架构的发展需求,这一点需要讨论; 参考Tesla和Mobileye的模式,从完整自驾系统方案出发,尽量单一化Camera的CIS,带来的好处众多,这个也对后续ISP的统一化,感知算法的输入图片裁切统一化都会大大减少适配工作量。
从端到端的算法角度考虑,统一化Camera传感器数据接口(对感知算法而言只有一种图片格式输入),有助于end-to-end的迭代演进;
 图1 Tesla 前视Camera 通用化设计方案
图1 Tesla 前视Camera 通用化设计方案