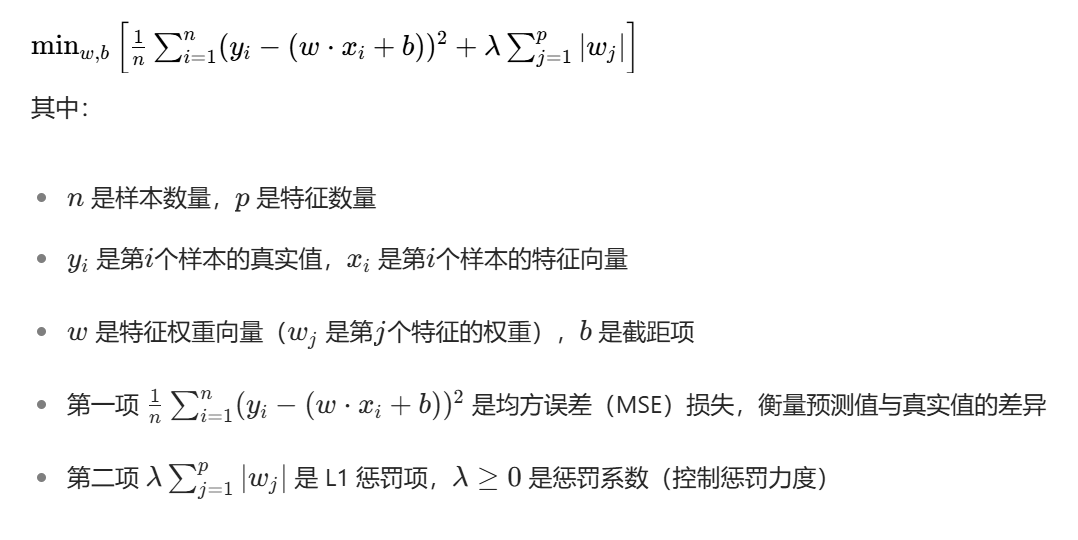
 - 拉索回归可以将一些权重压缩到零,从而实现特征选择。这意味着模型最终可能只包含一部分特征。
- 拉索回归可以将一些权重压缩到零,从而实现特征选择。这意味着模型最终可能只包含一部分特征。
-
适用于特征数量远大于样本数量的情况,或者当特征间存在相关性时,可以从中选择最相关的特征。
-
拉索回归产生的模型可能更简单,因为它会去除一些不重要的特征。
API
sklearn.linear_model.Lasso()
参数:
-
alpha (float, default=1.0):
- 控制正则化强度;必须是非负浮点数。较大的 alpha 增加了正则化强度。
-
fit_intercept (bool, default=True):
- 是否计算此模型的截距。如果设置为 False,则不会使用截距(即数据应该已经被居中)。
-
precompute (bool or array-like, default=False):
- 如果为 True,则使用预计算的 Gram 矩阵来加速计算。如果为数组,则使用提供的 Gram 矩阵。
-
copy_X (bool, default=True):
- 如果为 True,则复制数据 X,否则可能对其进行修改。
-
max_iter (int, default=1000):
- 最大迭代次数。
-
tol (float, default=1e-4):
- 精度阈值。如果更新后的系数向量减去之前的系数向量的无穷范数除以 1 加上更新后的系数向量的无穷范数小于 tol,则认为收敛。
-
warm_start (bool, default=False):
- 当设置为 True 时,再次调用 fit 方法会重新使用之前调用 fit 方法的结果作为初始估计值,而不是清零它们。
-
positive (bool, default=False):
- 当设置为 True 时,强制系数为非负。
-
random_state (int, RandomState instance, default=None):
- 随机数生成器的状态。用于随机初始化坐标下降算法中的随机选择。
-
selection ({'cyclic', 'random'}, default='cyclic'):
- 如果设置为 'random',则随机选择坐标进行更新。如果设置为 'cyclic',则按照循环顺序选择坐标。
属性:
-
coef_
- 系数向量或者矩阵,代表了每个特征的权重。
-
intercept_
- 截距项(如果 fit_intercept=True)。
-
n_iter_
- 实际使用的迭代次数。
-
n_features_in_ (int):
- 训练样本中特征的数量。
python
from sklearn.linear_model import Lasso
from sklearn.model_selection import train_test_split
from sklearn.datasets import fetch_california_housing
from sklearn.preprocessing import StandardScaler
from sklearn.metrics import mean_squared_error
x,y = fetch_california_housing(return_X_y=True,data_home = "./src")
x_train,x_test,y_train,y_test = train_test_split(x,y,test_size = 0.2,random_state = 42)
scaler = StandardScaler()
x_train = scaler.fit_transform(x_train)
x_train = scaler.fit_transform(x_train)
model = Lasso(alpha =0.01,max_iter = 100,fit_intercept=True)
#调节alpha越大出现的零越多,因此拉索回归自带降维
model.fit(x_train,y_train)
y_hat = model.predict(x_test)
print("loss:",mean_squared_error(y_test,y_hat))
print("w:",model.coef_)
print("b:",model.intercept_)