代码下载什么的就不多说了,直接看需要移植修改的代码。
1、osal.c修改
c
/******************************************************************************
* * *** ***
* *** *** ***
* *** **** ********** *** ***** *** **** *****
* ********* ********** *** ********* ************ *********
* **** *** *** *** *** **** ***
* *** *** ****** *** *********** *** **** *****
* *** *** ****** *** ************* *** **** *****
* *** **** **** *** *** *** **** ***
* *** ******* ***** ************** ************* *********
* *** ***** *** ******* ** ** ****** *****
* t h e r e a l t i m e t a r g e t e x p e r t s
*
* http://www.rt-labs.com
* Copyright (C) 2009. rt-labs AB, Sweden. All rights reserved.
*------------------------------------------------------------------------------
* $Id: osal.c 452 2013-02-26 21:02:58Z smf.arthur $
*------------------------------------------------------------------------------
*/
#include "FreeRTOS.h"
#include "task.h"
#include "FreeRTOSConfig.h"
#include "osal.h"
#include <stdint.h>
#include <stdbool.h>
/* --- 常量定义 --- */
#define USECS_PER_SEC 1000000UL
#define USECS_PER_MSEC 1000UL
#define SECS_PER_DAY 86400UL
/* --- 静态函数声明 --- */
static void udelay(uint32_t us);
static inline uint32_t get_usec_per_tick(void);
/*
* 获取每个tick的微秒数(运行时计算避免除法)
*/
static inline uint32_t get_usec_per_tick(void) {
static const uint32_t usec_per_tick = USECS_PER_SEC / configTICK_RATE_HZ;
return usec_per_tick;
}
/**
* @brief 获取高精度时间戳(微秒)
* @return 从系统启动开始的微秒数
*/
uint64_t get_highres_time_us(void) {
static uint32_t last_cnt = 0;
static uint32_t overflow_count = 0;
uint32_t current_cnt = TIM17->CNT;
// 检测计数器溢出
if (current_cnt < last_cnt) {
overflow_count++;
}
last_cnt = current_cnt;
// 计算总微秒数
return (uint64_t)overflow_count * 65536 + current_cnt;
}
/**
* @brief 高精度微秒级延时(基于 TIM17)
* @param us 延时的微秒数
*/
void udelay(uint32_t us) {
if (us == 0) return;
// 获取 TIM17 当前计数值
uint32_t start = TIM17->CNT;
// 计算目标计数值(处理计数器溢出)
uint32_t target = start + us;
// 处理 16 位计数器溢出
if (target > 0xFFFF) {
// 等待计数器溢出
while (TIM17->CNT >= start) {
__NOP();
}
// 重新计算目标值
target = us - (0xFFFF - start + 1);
start = 0;
}
// 等待计数器达到目标值
while (TIM17->CNT < target) {
__NOP();
}
}
/*
* 获取当前时间(高精度实现)
*/
int gettimeofday(struct timeval *tp, void *tzp) {
if (!tp) return -1;
const TickType_t total_ticks = xTaskGetTickCount();
const uint32_t ticks_per_sec = configTICK_RATE_HZ;
tp->tv_sec = total_ticks / ticks_per_sec;
tp->tv_usec = (uint32_t)((total_ticks % ticks_per_sec) *
(uint64_t)USECS_PER_SEC / ticks_per_sec);
(void)tzp;
return 0;
}
/*
* 微秒级睡眠
*/
int osal_usleep(uint32_t usec) {
udelay(usec);
return 0;
}
/*
* 获取当前时间(标准函数封装)
*/
int osal_gettimeofday(struct timeval *tv, struct timezone *tz) {
(void)tz; // 时区通常不使用
return gettimeofday(tv, NULL);
}
/*
* 获取当前时间(ECAT格式)
*/
ec_timet osal_current_time(void) {
struct timeval tv;
gettimeofday(&tv, NULL);
return (ec_timet){tv.tv_sec, tv.tv_usec};
}
/*
* 启动定时器
*/
void osal_timer_start(osal_timert *self, uint32_t timeout_us) {
if (!self) return;
self->start_tick = xTaskGetTickCount();
const uint32_t usec_per_tick = get_usec_per_tick();
// 四舍五入计算tick数
self->timeout_ticks = (timeout_us + usec_per_tick / 2) / usec_per_tick;
// 确保至少1个tick的延时
if (self->timeout_ticks == 0 && timeout_us > 0) {
self->timeout_ticks = 1;
}
}
/*
* 检查定时器是否过期
*/
bool osal_timer_is_expired(const osal_timert *self) {
if (!self) return true;
const TickType_t current = xTaskGetTickCount();
const TickType_t elapsed = current - self->start_tick;
// 处理tick计数器溢出情况
if (elapsed > current) {
// 发生溢出时,elapsed值将大于当前值
return true;
}
return (elapsed >= self->timeout_ticks);
}2、oshw.c 增加大小端转换宏定义
c
#ifndef htons
#define htons(x) ((((x)&0xff)<<8)|(((x)&0xff00)>>8))
#endif
#ifndef ntohs
#define ntohs(x) htons(x)
#endif
#ifndef htonl
#define htonl(x) ((((x)&0xff)<<24)| \
(((x)&0xff00)<<8) | \
(((x)&0xff0000)>>8) | \
(((x)&0xff000000)>>24))
#endif
#ifndef ntohl
#define ntohl(x) htonl(x)
#endif3、nicdrv.c
在nicdrv.h增加FreeRTOS的互斥量操作宏定义
c
#include "FreeRTOS.h"
#include "semphr.h"
// 定义信号量类型
typedef SemaphoreHandle_t mtx_t;
// 创建互斥锁
#define mtx_create() xSemaphoreCreateMutex()
// 锁定互斥锁(带超时)
#define mtx_lock(mutex) (xSemaphoreTake((mutex), portMAX_DELAY) == pdPASS)
// 解锁互斥锁
#define mtx_unlock(mutex) (xSemaphoreGive(mutex) == pdPASS)
// 销毁互斥锁
#define mtx_destroy(mutex) vSemaphoreDelete(mutex)
c
/*
* Simple Open EtherCAT Master Library
*
* File : nicdrv.c
* Version : 1.3.0
* Date : 24-02-2013
* Copyright (C) 2005-2013 Speciaal Machinefabriek Ketels v.o.f.
* Copyright (C) 2005-2013 Arthur Ketels
* Copyright (C) 2008-2009 TU/e Technische Universiteit Eindhoven
*
* SOEM is free software; you can redistribute it and/or modify it under
* the terms of the GNU General Public License version 2 as published by the Free
* Software Foundation.
*
* SOEM is distributed in the hope that it will be useful, but WITHOUT ANY
* WARRANTY; without even the implied warranty of MERCHANTABILITY or
* FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License
* for more details.
*
* As a special exception, if other files instantiate templates or use macros
* or inline functions from this file, or you compile this file and link it
* with other works to produce a work based on this file, this file does not
* by itself cause the resulting work to be covered by the GNU General Public
* License. However the source code for this file must still be made available
* in accordance with section (3) of the GNU General Public License.
*
* This exception does not invalidate any other reasons why a work based on
* this file might be covered by the GNU General Public License.
*
* The EtherCAT Technology, the trade name and logo "EtherCAT" are the intellectual
* property of, and protected by Beckhoff Automation GmbH. You can use SOEM for
* the sole purpose of creating, using and/or selling or otherwise distributing
* an EtherCAT network master provided that an EtherCAT Master License is obtained
* from Beckhoff Automation GmbH.
*
* In case you did not receive a copy of the EtherCAT Master License along with
* SOEM write to Beckhoff Automation GmbH, Eiserstraße 5, D-33415 Verl, Germany
* (www.beckhoff.com).
*/
/** \file
* \brief
* EtherCAT RAW socket driver.
*
* Low level interface functions to send and receive EtherCAT packets.
* EtherCAT has the property that packets are only send by the master,
* and the send packets allways return in the receive buffer.
* There can be multiple packets "on the wire" before they return.
* To combine the received packets with the original send packets a buffer
* system is installed. The identifier is put in the index item of the
* EtherCAT header. The index is stored and compared when a frame is recieved.
* If there is a match the packet can be combined with the transmit packet
* and returned to the higher level function.
*
* The socket layer can exhibit a reversal in the packet order (rare).
* If the Tx order is A-B-C the return order could be A-C-B. The indexed buffer
* will reorder the packets automatically.
*
* The "redundant" option will configure two sockets and two NIC interfaces.
* Slaves are connected to both interfaces, one on the IN port and one on the
* OUT port. Packets are send via both interfaces. Any one of the connections
* (also an interconnect) can be removed and the slaves are still serviced with
* packets. The software layer will detect the possible failure modes and
* compensate. If needed the packets from interface A are resend through interface B.
* This layer is fully transparent for the higher layers.
*/
//主要是网络数据收发
#include <stdio.h>
#include <string.h>
#include "osal.h"
#include "oshw.h"
#include "soem_hook.h"
#ifndef MAX
#define MAX(a,b) (((a) > (b)) ? (a) : (b))
#define MIN(a,b) (((a) < (b)) ? (a) : (b))
#endif
/** Redundancy modes */
enum
{
/** No redundancy, single NIC mode */
ECT_RED_NONE,
/** Double redundant NIC connecetion */
ECT_RED_DOUBLE
};
/** Primary source MAC address used for EtherCAT.
* This address is not the MAC address used from the NIC.
* EtherCAT does not care about MAC addressing, but it is used here to
* differentiate the route the packet traverses through the EtherCAT
* segment. This is needed to find out the packet flow in redundant
* configurations. */
const uint16 priMAC[3] = { 0x0101, 0x0101, 0x0101 };
/** Secondary source MAC address used for EtherCAT. */
const uint16 secMAC[3] = { 0x0404, 0x0404, 0x0404 };
/** second MAC word is used for identification */
#define RX_PRIM priMAC[1]
/** second MAC word is used for identification */
#define RX_SEC secMAC[1]
/** Basic setup to connect NIC to socket.
* @param[in] port = port context struct
* @param[in] ifname = Name of NIC device, f.e. "eth0"
* @param[in] secondary = if >0 then use secondary stack instead of primary
* @return >0 if succeeded
*/
int ecx_setupnic(ecx_portt *port, const char *ifname, int secondary)
{
int i;
int rVal;
int *psock;
port->getindex_mutex = mtx_create();
port->tx_mutex = mtx_create();
port->rx_mutex = mtx_create();
// rVal = bfin_EMAC_init((uint8_t *)priMAC);
// if (rVal != 0)
// return 0;
if (secondary)
{
/* secondary port stuct available? */
if (port->redport)
{
/* when using secondary socket it is automatically a redundant setup */
psock = &(port->redport->sockhandle);
*psock = -1;
port->redstate = ECT_RED_DOUBLE;
port->redport->stack.sock = &(port->redport->sockhandle);
port->redport->stack.txbuf = &(port->txbuf);
port->redport->stack.txbuflength = &(port->txbuflength);
port->redport->stack.tempbuf = &(port->redport->tempinbuf);
port->redport->stack.rxbuf = &(port->redport->rxbuf);
port->redport->stack.rxbufstat = &(port->redport->rxbufstat);
port->redport->stack.rxsa = &(port->redport->rxsa);
}
else
{
/* fail */
return 0;
}
}
else
{
port->getindex_mutex = mtx_create();
port->tx_mutex = mtx_create();
port->rx_mutex = mtx_create();
port->sockhandle = -1;
port->lastidx = 0;
port->redstate = ECT_RED_NONE;
port->stack.sock = &(port->sockhandle);
port->stack.txbuf = &(port->txbuf);
port->stack.txbuflength = &(port->txbuflength);
port->stack.tempbuf = &(port->tempinbuf);
port->stack.rxbuf = &(port->rxbuf);
port->stack.rxbufstat = &(port->rxbufstat);
port->stack.rxsa = &(port->rxsa);
psock = &(port->sockhandle);
}
if(install_hook(port, ifname)==0){
return 0; //fail
}
/* setup ethernet headers in tx buffers so we don't have to repeat it */
for (i = 0; i < EC_MAXBUF; i++)
{
ec_setupheader(&(port->txbuf[i]));
port->rxbufstat[i] = EC_BUF_EMPTY;
}
ec_setupheader(&(port->txbuf2));
return 1;
}
/** Close sockets used
* @param[in] port = port context struct
* @return 0
*/
int ecx_closenic(ecx_portt *port)
{
mtx_destroy(port->getindex_mutex);
mtx_destroy(port->tx_mutex);
mtx_destroy(port->rx_mutex);
uninstall_hook(port);
return 0;
}
/** Fill buffer with ethernet header structure.
* Destination MAC is allways broadcast.
* Ethertype is allways ETH_P_ECAT.
* @param[out] p = buffer
*/
void ec_setupheader(void *p)
{
ec_etherheadert *bp;
bp = p;
bp->da0 = oshw_htons(0xffff);
bp->da1 = oshw_htons(0xffff);
bp->da2 = oshw_htons(0xffff);
bp->sa0 = oshw_htons(priMAC[0]);
bp->sa1 = oshw_htons(priMAC[1]);
bp->sa2 = oshw_htons(priMAC[2]);
bp->etype = oshw_htons(ETH_P_ECAT);
}
/** Get new frame identifier index and allocate corresponding rx buffer.
* @param[in] port = port context struct
* @return new index.
*/
int ecx_getindex(ecx_portt *port)
{
int idx;
int cnt;
mtx_lock (port->getindex_mutex);
idx = port->lastidx + 1;
/* index can't be larger than buffer array */
if (idx >= EC_MAXBUF)
{
idx = 0;
}
cnt = 0;
/* try to find unused index */
while ((port->rxbufstat[idx] != EC_BUF_EMPTY) && (cnt < EC_MAXBUF))
{
idx++;
cnt++;
if (idx >= EC_MAXBUF)
{
idx = 0;
}
}
port->rxbufstat[idx] = EC_BUF_ALLOC;
if (port->redstate != ECT_RED_NONE)
{
port->redport->rxbufstat[idx] = EC_BUF_ALLOC;
}
port->lastidx = idx;
mtx_unlock (port->getindex_mutex);
return idx;
}
/** Set rx buffer status.
* @param[in] port = port context struct
* @param[in] idx = index in buffer array
* @param[in] bufstat = status to set
*/
void ecx_setbufstat(ecx_portt *port, int idx, int bufstat)
{
port->rxbufstat[idx] = bufstat;
if (port->redstate != ECT_RED_NONE)
{
port->redport->rxbufstat[idx] = bufstat;
}
}
/** Transmit buffer over socket (non blocking).
* @param[in] port = port context struct
* @param[in] idx = index in tx buffer array
* @param[in] stacknumber = 0=Primary 1=Secondary stack
* @return socket send result
*/
int ecx_outframe(ecx_portt *port, int idx, int stacknumber)
{
int lp, rval;
ec_stackT *stack;
if (!stacknumber)
{
stack = &(port->stack);
}
else
{
stack = &(port->redport->stack);
}
lp = (*stack->txbuflength)[idx];
rval = net_send((*stack->txbuf)[idx], lp);
(*stack->rxbufstat)[idx] = EC_BUF_TX;
return rval;
}
/** Transmit buffer over socket (non blocking).
* @param[in] port = port context struct
* @param[in] idx = index in tx buffer array
* @return socket send result
*/
int ecx_outframe_red(ecx_portt *port, int idx)
{
ec_comt *datagramP;
ec_etherheadert *ehp;
int rval;
ehp = (ec_etherheadert *)&(port->txbuf[idx]);
/* rewrite MAC source address 1 to primary */
ehp->sa1 = oshw_htons(priMAC[1]);
/* transmit over primary socket*/
rval = ecx_outframe(port, idx, 0);
if (port->redstate != ECT_RED_NONE)
{
mtx_lock (port->tx_mutex);
ehp = (ec_etherheadert *)&(port->txbuf2);
/* use dummy frame for secondary socket transmit (BRD) */
datagramP = (ec_comt*)&(port->txbuf2[ETH_HEADERSIZE]);
/* write index to frame */
datagramP->index = idx;
/* rewrite MAC source address 1 to secondary */
ehp->sa1 = oshw_htons(secMAC[1]);
/* transmit over secondary socket */
//send(sockhandle2, &ec_txbuf2, ec_txbuflength2 , 0);
// OBS! redundant not ACTIVE for BFIN, just added to compile
// ASSERT (0);
net_send(port->txbuf2, port->txbuflength2);
mtx_unlock (port->tx_mutex);
port->redport->rxbufstat[idx] = EC_BUF_TX;
}
return rval;
}
/** Non blocking read of socket. Put frame in temporary buffer.
* @param[in] port = port context struct
* @param[in] stacknumber = 0=primary 1=secondary stack
* @return >0 if frame is available and read
*/
static int ecx_recvpkt(ecx_portt *port, int stacknumber)
{
int lp, bytesrx;
ec_stackT *stack;
if (!stacknumber)
{
stack = &(port->stack);
}
else
{
stack = &(port->redport->stack);
}
lp = sizeof(port->tempinbuf);
bytesrx = net_recv((*stack->tempbuf), lp);
port->tempinbufs = bytesrx;
return (bytesrx > 0);
}
/** Non blocking receive frame function. Uses RX buffer and index to combine
* read frame with transmitted frame. To compensate for received frames that
* are out-of-order all frames are stored in their respective indexed buffer.
* If a frame was placed in the buffer previously, the function retreives it
* from that buffer index without calling ec_recvpkt. If the requested index
* is not already in the buffer it calls ec_recvpkt to fetch it. There are
* three options now, 1 no frame read, so exit. 2 frame read but other
* than requested index, store in buffer and exit. 3 frame read with matching
* index, store in buffer, set completed flag in buffer status and exit.
*
* @param[in] port = port context struct
* @param[in] idx = requested index of frame
* @param[in] stacknumber = 0=primary 1=secondary stack
* @return Workcounter if a frame is found with corresponding index, otherwise
* EC_NOFRAME or EC_OTHERFRAME.
*/
int ecx_inframe(ecx_portt *port, int idx, int stacknumber)
{
uint16 l;
int rval;
uint8 idxf;
ec_etherheadert *ehp;
ec_comt *ecp;
ec_stackT *stack;
ec_bufT *rxbuf;
if (!stacknumber)
{
stack = &(port->stack);
}
else
{
stack = &(port->redport->stack);
}
rval = EC_NOFRAME;
rxbuf = &(*stack->rxbuf)[idx];
/* check if requested index is already in buffer ? */
if ((idx < EC_MAXBUF) && ( (*stack->rxbufstat)[idx] == EC_BUF_RCVD))
{
l = (*rxbuf)[0] + ((uint16)((*rxbuf)[1] & 0x0f) << 8);
/* return WKC */
rval = ((*rxbuf)[l] + ((uint16)(*rxbuf)[l + 1] << 8));
/* mark as completed */
(*stack->rxbufstat)[idx] = EC_BUF_COMPLETE;
}
else
{
mtx_lock (port->rx_mutex);
/* non blocking call to retrieve frame from socket */
if (ecx_recvpkt(port, stacknumber))
{
rval = EC_OTHERFRAME;
ehp =(ec_etherheadert*)(stack->tempbuf);
/* check if it is an EtherCAT frame */
if (ehp->etype == oshw_htons(ETH_P_ECAT))
{
ecp =(ec_comt*)(&(*stack->tempbuf)[ETH_HEADERSIZE]);
l = etohs(ecp->elength) & 0x0fff;
idxf = ecp->index;
/* found index equals reqested index ? */
if (idxf == idx)
{
/* yes, put it in the buffer array (strip ethernet header) */
memcpy(rxbuf, &(*stack->tempbuf)[ETH_HEADERSIZE], (*stack->txbuflength)[idx] - ETH_HEADERSIZE);
/* return WKC */
rval = ((*rxbuf)[l] + ((uint16)((*rxbuf)[l + 1]) << 8));
/* mark as completed */
(*stack->rxbufstat)[idx] = EC_BUF_COMPLETE;
/* store MAC source word 1 for redundant routing info */
(*stack->rxsa)[idx] = oshw_ntohs(ehp->sa1);
}
else
{
/* check if index exist? */
if (idxf < EC_MAXBUF)
{
rxbuf = &(*stack->rxbuf)[idxf];
/* put it in the buffer array (strip ethernet header) */
memcpy(rxbuf, &(*stack->tempbuf)[ETH_HEADERSIZE], (*stack->txbuflength)[idxf] - ETH_HEADERSIZE);
/* mark as received */
(*stack->rxbufstat)[idxf] = EC_BUF_RCVD;
(*stack->rxsa)[idxf] = oshw_ntohs(ehp->sa1);
}
else
{
/* strange things happend */
}
}
}
}
mtx_unlock (port->rx_mutex);
}
/* WKC if mathing frame found */
return rval;
}
/** Blocking redundant receive frame function. If redundant mode is not active then
* it skips the secondary stack and redundancy functions. In redundant mode it waits
* for both (primary and secondary) frames to come in. The result goes in an decision
* tree that decides, depending on the route of the packet and its possible missing arrival,
* how to reroute the original packet to get the data in an other try.
*
* @param[in] port = port context struct
* @param[in] idx = requested index of frame
* @param[in] timer = absolute timeout time
* @return Workcounter if a frame is found with corresponding index, otherwise
* EC_NOFRAME.
*/
static int ecx_waitinframe_red(ecx_portt *port, int idx, const osal_timert timer)
{
int wkc = EC_NOFRAME;
int wkc2 = EC_NOFRAME;
int primrx, secrx;
/* if not in redundant mode then always assume secondary is OK */
if (port->redstate == ECT_RED_NONE)
{
wkc2 = 0;
}
do
{
/* only read frame if not already in */
if (wkc <= EC_NOFRAME)
{
wkc = ecx_inframe(port, idx, 0);
}
/* only try secondary if in redundant mode */
if (port->redstate != ECT_RED_NONE)
{
/* only read frame if not already in */
if (wkc2 <= EC_NOFRAME)
wkc2 = ecx_inframe(port, idx, 1);
}
/* wait for both frames to arrive or timeout */
} while (((wkc <= EC_NOFRAME) || (wkc2 <= EC_NOFRAME)) && (osal_timer_is_expired(&timer) == FALSE));
/* only do redundant functions when in redundant mode */
if (port->redstate != ECT_RED_NONE)
{
/* primrx if the reveived MAC source on primary socket */
primrx = 0;
if (wkc > EC_NOFRAME)
{
primrx = port->rxsa[idx];
}
/* secrx if the reveived MAC source on psecondary socket */
secrx = 0;
if (wkc2 > EC_NOFRAME)
{
secrx = port->redport->rxsa[idx];
}
/* primary socket got secondary frame and secondary socket got primary frame */
/* normal situation in redundant mode */
if ( ((primrx == RX_SEC) && (secrx == RX_PRIM)) )
{
/* copy secondary buffer to primary */
memcpy(&(port->rxbuf[idx]), &(port->redport->rxbuf[idx]), port->txbuflength[idx] - ETH_HEADERSIZE);
wkc = wkc2;
}
/* primary socket got nothing or primary frame, and secondary socket got secondary frame */
/* we need to resend TX packet */
if ( ((primrx == 0) && (secrx == RX_SEC)) ||
((primrx == RX_PRIM) && (secrx == RX_SEC)) )
{
osal_timert read_timer;
/* If both primary and secondary have partial connection retransmit the primary received
* frame over the secondary socket. The result from the secondary received frame is a combined
* frame that traversed all slaves in standard order. */
if ( (primrx == RX_PRIM) && (secrx == RX_SEC) )
{
/* copy primary rx to tx buffer */
memcpy(&(port->txbuf[idx][ETH_HEADERSIZE]), &(port->rxbuf[idx]), port->txbuflength[idx] - ETH_HEADERSIZE);
}
osal_timer_start(&read_timer, EC_TIMEOUTRET);
/* resend secondary tx */
ecx_outframe(port, idx, 1);
do
{
/* retrieve frame */
wkc2 = ecx_inframe(port, idx, 1);
} while ((wkc2 <= EC_NOFRAME) && (osal_timer_is_expired(&read_timer) == FALSE));
if (wkc2 > EC_NOFRAME)
{
/* copy secondary result to primary rx buffer */
memcpy(&(port->rxbuf[idx]), &(port->redport->rxbuf[idx]), port->txbuflength[idx] - ETH_HEADERSIZE);
wkc = wkc2;
}
}
}
/* return WKC or EC_NOFRAME */
return wkc;
}
/** Blocking receive frame function. Calls ec_waitinframe_red().
* @param[in] port = port context struct
* @param[in] idx = requested index of frame
* @param[in] timeout = timeout in us
* @return Workcounter if a frame is found with corresponding index, otherwise
* EC_NOFRAME.
*/
int ecx_waitinframe(ecx_portt *port, int idx, int timeout)
{
int wkc;
osal_timert timer;
osal_timer_start (&timer, timeout);
wkc = ecx_waitinframe_red(port, idx, timer);
/* if nothing received, clear buffer index status so it can be used again */
if (wkc <= EC_NOFRAME)
{
ecx_setbufstat(port, idx, EC_BUF_EMPTY);
}
return wkc;
}
/** Blocking send and recieve frame function. Used for non processdata frames.
* A datagram is build into a frame and transmitted via this function. It waits
* for an answer and returns the workcounter. The function retries if time is
* left and the result is WKC=0 or no frame received.
*
* The function calls ec_outframe_red() and ec_waitinframe_red().
*
* @param[in] port = port context struct
* @param[in] idx = index of frame
* @param[in] timeout = timeout in us
* @return Workcounter or EC_NOFRAME
*/
int ecx_srconfirm(ecx_portt *port, int idx, int timeout)
{
int wkc = EC_NOFRAME;
osal_timert timer;
osal_timer_start(&timer, timeout);
do
{
osal_timert read_timer;
/* tx frame on primary and if in redundant mode a dummy on secondary */
ecx_outframe_red(port, idx);
osal_timer_start(&read_timer, MIN(timeout, EC_TIMEOUTRET));
/* get frame from primary or if in redundant mode possibly from secondary */
wkc = ecx_waitinframe_red(port, idx, read_timer);
/* wait for answer with WKC>0 or otherwise retry until timeout */
} while ((wkc <= EC_NOFRAME) && (osal_timer_is_expired(&timer) == FALSE));
/* if nothing received, clear buffer index status so it can be used again */
if (wkc <= EC_NOFRAME)
{
ecx_setbufstat(port, idx, EC_BUF_EMPTY);
}
return wkc;
}
#ifdef EC_VER1
int ec_setupnic(const char *ifname, int secondary)
{
return ecx_setupnic(&ecx_port, ifname, secondary);
}
int ec_closenic(void)
{
return ecx_closenic(&ecx_port);
}
int ec_getindex(void)
{
return ecx_getindex(&ecx_port);
}
void ec_setbufstat(int idx, int bufstat)
{
ecx_setbufstat(&ecx_port, idx, bufstat);
}
int ec_outframe(int idx, int stacknumber)
{
return ecx_outframe(&ecx_port, idx, stacknumber);
}
int ec_outframe_red(int idx)
{
return ecx_outframe_red(&ecx_port, idx);
}
int ec_inframe(int idx, int stacknumber)
{
return ecx_inframe(&ecx_port, idx, stacknumber);
}
int ec_waitinframe(int idx, int timeout)
{
return ecx_waitinframe(&ecx_port, idx, timeout);
}
int ec_srconfirm(int idx, int timeout)
{
return ecx_srconfirm(&ecx_port, idx, timeout);
}
#endif4、创建一个hook源文件,使用LwIP协议栈底层hook函数来处理PHY芯片的收发。
c
#include "lwip/netif.h"
#include "lwip/pbuf.h"
#include "FreeRTOS.h"
#include "task.h"
#include "semphr.h"
#include "osal.h"
#define HOOK_RX_BUFSIZE 10
static uint8_t netfrmbuf[HOOK_RX_BUFSIZE][1540];
static int netfrmbuf_cnt[HOOK_RX_BUFSIZE];
static int netfrm_head = 0;
static int netfrm_tail = 0;
static bool netfrm_full = false;
static struct netif *target_netif = NULL;
static netif_input_fn orig_input = NULL;
static netif_linkoutput_fn orig_linkoutput = NULL; // 正确类型声明
static SemaphoreHandle_t buf_mutex = NULL;
/******************************************************************************
* Hook Functions
******************************************************************************/
// 修正为正确的参数和返回类型
static err_t _netif_linkoutput(struct netif *netif, struct pbuf *p) {
return orig_linkoutput(netif, p);
}
static err_t _netif_input(struct pbuf *p, struct netif *inp) {
if (p->tot_len >= 14) {
uint8_t *data = (uint8_t*)p->payload;
if (data[12] == 0x88 && data[13] == 0xa4) { // EtherCAT frame
xSemaphoreTake(buf_mutex, portMAX_DELAY);
if (!netfrm_full) {
pbuf_copy_partial(p, netfrmbuf[netfrm_tail], p->tot_len, 0);
netfrmbuf_cnt[netfrm_tail] = p->tot_len;
netfrm_tail = (netfrm_tail + 1) % HOOK_RX_BUFSIZE;
netfrm_full = (netfrm_tail == netfrm_head);
}
xSemaphoreGive(buf_mutex);
}
}
return orig_input(p, inp);
}
/******************************************************************************
* Hook Management
******************************************************************************/
int install_hook(const char *ifname) {
if (buf_mutex == NULL) {
buf_mutex = xSemaphoreCreateMutex();
if (!buf_mutex) return 0;
}
target_netif = netif_find(ifname);
if (!target_netif) {
EC_PRINT("[HOOK] Netif %s not found\n", ifname);
return 0;
}
taskENTER_CRITICAL();
// 确保使用正确的类型匹配
orig_linkoutput = target_netif->linkoutput; // 2个参数的linkoutput
orig_input = target_netif->input;
target_netif->linkoutput = _netif_linkoutput; // 2个参数
target_netif->input = _netif_input;
taskEXIT_CRITICAL();
EC_PRINT("[HOOK] Installed on %s (0x%p)\n", ifname, (void*)target_netif);
return 1;
}
int uninstall_hook(void) {
if (!target_netif) return 0;
taskENTER_CRITICAL();
target_netif->input = orig_input;
target_netif->linkoutput = orig_linkoutput;
target_netif = NULL;
taskEXIT_CRITICAL();
EC_PRINT("[HOOK] Uninstalled\n");
return 1;
}
/******************************************************************************
* Network Operations
******************************************************************************/
int net_send(uint8_t *data, int len) {
if (len <= 0 || !target_netif) return -1;
struct pbuf *p = pbuf_alloc(PBUF_RAW, len, PBUF_POOL);
if (!p) {
EC_PRINT("[SEND] PBuf alloc failed\n");
return -1;
}
pbuf_take(p, data, len);
err_t err = _netif_linkoutput(target_netif, p);
pbuf_free(p);
return (err == ERR_OK) ? len : -1;
}
int net_recv(uint8_t *data, int max_len) {
if (!data || max_len <= 0) return -1;
xSemaphoreTake(buf_mutex, portMAX_DELAY);
if (netfrm_head == netfrm_tail && !netfrm_full) {
xSemaphoreGive(buf_mutex);
return 0;
}
int total = netfrmbuf_cnt[netfrm_head];
if (total > max_len) total = max_len;
memcpy(data, netfrmbuf[netfrm_head], total);
netfrm_head = (netfrm_head + 1) % HOOK_RX_BUFSIZE;
netfrm_full = false;
xSemaphoreGive(buf_mutex);
return total;
}5 、hook测试函数
lwip 默认stm32的网卡名为"st"
c
void test_hook(void) {
#define TEST_FRAME_LEN 64
const char *ifname = "st";
uint8_t send_buf[TEST_FRAME_LEN];
uint8_t recv_buf[TEST_FRAME_LEN];
int recv_len;
// 初始化一个测试帧,设置协议类型为0x88a4(EtherCAT)
memset(send_buf, 0, TEST_FRAME_LEN);
send_buf[12] = 0x88;
send_buf[13] = 0xa4;
const char payload[8] = {0x55,0x66,0x77,0x88,0x99,0xaa,0xbb,0xcc};
memcpy(send_buf + 14, payload, sizeof(payload));
// 安装钩子
if (!install_hook(ifname)) {
EC_PRINT("Hook installation failed.\n");
return;
}
// 发送测试帧
if (net_send(send_buf, TEST_FRAME_LEN) < 0) {
EC_PRINT("Send test frame failed.\n");
goto uninstall;
}
// 由于我们的钩子函数在发送时也会被调用(实际上是通过linkoutput钩子发送的,但注意我们的接收钩子是在输入路径上)
// 但我们发送的帧不会直接进入接收钩子,除非我们将其注入到接收路径(比如在回环接口上发送)。
// 因此,这里需要说明:在真实硬件上,发送的帧不会被自己接收,除非网络设备支持回环或者我们使用回环接口。
// 所以我们需要调整测试方法:在同一个网络接口上,我们不能直接捕获自己发送的帧(除非是回环)。
// 我们可能需要两个设备或者使用一个支持回环的接口。
// 由于测试环境限制,我们可能无法捕获自己发送的帧。因此,这个测试用例可能需要修改:
// 方案1:如果我们的网络接口支持回环(例如通过配置),则可以通过回环接收到发送的帧。
// 方案2:在模拟的TAP设备上,可以自己发送自己接收。
// 方案3:修改钩子函数,使其同时捕获发送和接收的帧。但原设计是只捕获接收路径上的EtherCAT帧。
// 重新考虑:我们设计的钩子函数是挂接在netif的input函数上,即当有数据包从网络设备接收时会被调用。发送的数据包只会经过linkoutput。
// 因此,我们之前的接收钩子不会捕获发送的包。
// 所以我们需要改变测试思路:我们测试接收钩子的正确性需要另一个设备发送EtherCAT帧,或者我们通过其他方式注入一个接收帧(比如直接调用netif->input函数)。
// 对于单元测试,我们可以模拟一个接收帧直接调用netif->input函数,但这样就不经过硬件,而我们的钩子函数就是挂在这个input上的。
// 但是我们安装钩子后,原来的input函数已经被替换,所以我们可以直接调用钩子函数来模拟接收。
// 由于测试的复杂性,这里我们改变策略,分为两个测试:
// 测试1:测试发送功能。直接调用net_send,然后在外部验证(如使用抓包工具)是否发送成功。
// 测试2:测试接收功能。我们可以模拟一个接收事件:通过直接调用安装钩子后的input函数(即_netif_input)来模拟接收。
// 测试1:发送
// 已经通过net_send发送了一个帧,在外部抓包验证。
EC_PRINT("Test frame sent. Please use external tool to verify.\n");
// 测试2:模拟接收
// 构建一个模拟接收的帧
uint8_t fake_recv_frame[TEST_FRAME_LEN];
memset(fake_recv_frame, 0, TEST_FRAME_LEN);
fake_recv_frame[12] = 0x88;
fake_recv_frame[13] = 0xa4;
const char *fake_payload = "Fake received EtherCAT frame";
memcpy(fake_recv_frame+14, fake_payload, strlen(fake_payload)+1);
// 构建一个pbuf来模拟接收
struct pbuf *p = pbuf_alloc(PBUF_RAW, TEST_FRAME_LEN, PBUF_POOL);
if (p == NULL) {
EC_PRINT("pbuf_alloc failed for simulated receive.\n");
goto uninstall;
}
pbuf_take(p, fake_recv_frame, TEST_FRAME_LEN);
// 调用钩子函数(即我们挂接的_netif_input)来处理这个模拟的接收帧
_netif_input(p, NULL); // 第二个参数是netif,可以传NULL因为我们内部不用(注意:内部函数使用了target_netif?实际我们函数里没用到inp参数)
pbuf_free(p);
// 现在我们应该可以通过net_recv接收到这个帧
recv_len = net_recv(recv_buf, TEST_FRAME_LEN);
if (recv_len <= 0) {
EC_PRINT("Didn't receive the simulated frame.\n");
} else {
EC_PRINT("Received frame, len=%d\n", recv_len);
// 打印接收到的内容,对比
if (memcmp(fake_recv_frame, recv_buf, recv_len) == 0) {
EC_PRINT("Simulated receive frame matches the sent one.\n");
} else {
EC_PRINT("Simulated receive frame does NOT match.\n");
}
}
uninstall:
// 卸载钩子
uninstall_hook();
EC_PRINT("Test finished.\n");
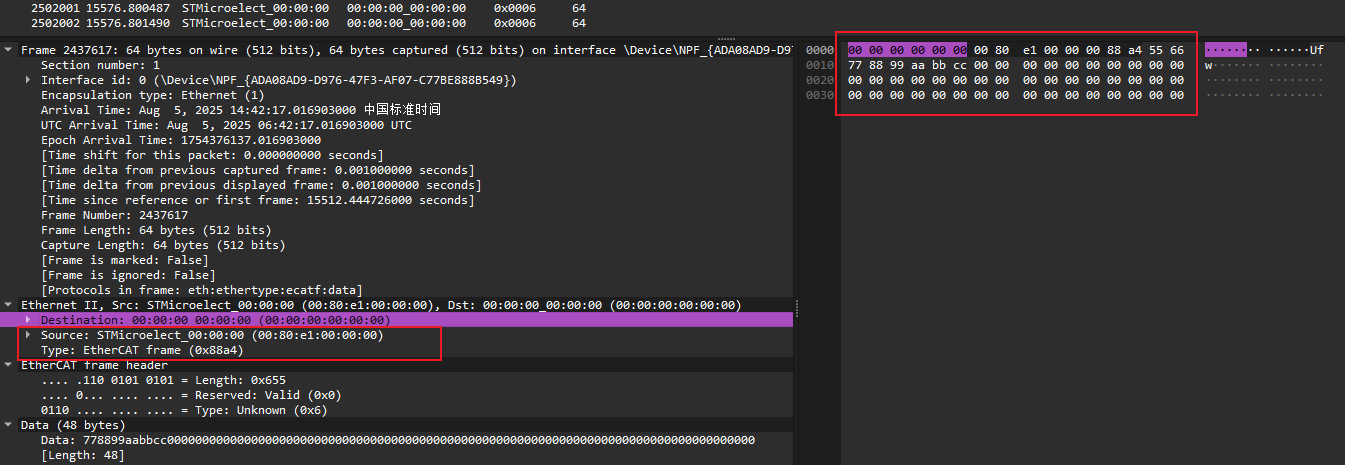
}6、测试实例
在任务中循环调用test_hook函数
使用wireshark抓包观察
在这里插入图片描述,数据收发ok,可以识别ethercat frame