1、车载摄像头的ISP
车载摄像头中的图像信号处理器(ISP)是其核心组成部分之一,负责对图像传感器输出的原始数据进行处理,以生成高质量、可被人类或自动驾驶系统识别的图像。ISP 的主要功能包括去除噪点、自动曝光、自动白平衡、自动聚焦等,从而提升图像质量并减少数据量,使其更易于传输和处理。在车载摄像头系统中,ISP 的作用至关重要,因为它直接影响到驾驶员或自动驾驶系统的感知能力。
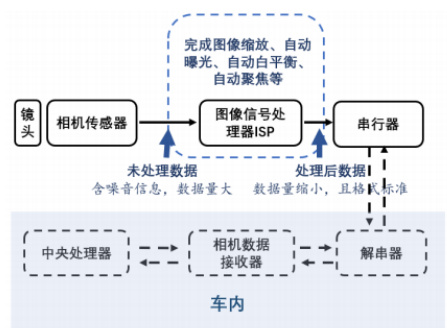 图1 IPS在系统链路中的位置
图1 IPS在系统链路中的位置
2、ISP工作流
ISP 的工作流程通常包括以下几个步骤:首先,镜头捕捉光线并将其转换为电信号,这些信号由图像传感器(CMOS)接收并转换为 RAW 格式的数据。随后,ISP 对这些数据进行处理,包括缩放、去噪、色彩校正、动态范围调整等操作,最终生成 RGB 或 YUV 等标准格式的图像。处理后的图像数据通过串行器(Serializer)转换为符合 GMSL 等标准的串行数据,以便高效传输到车载系统的其他部分,如中央处理器或域控制器
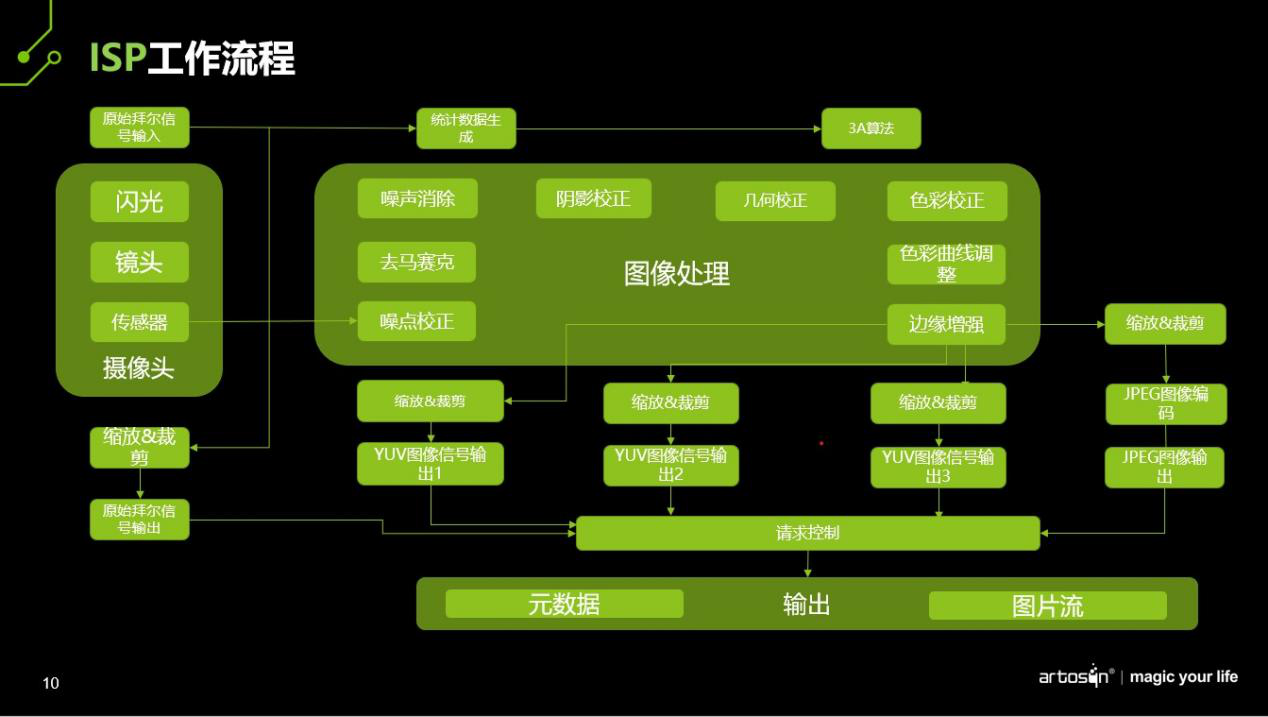 图2 ISP Pipeline
图2 ISP Pipeline
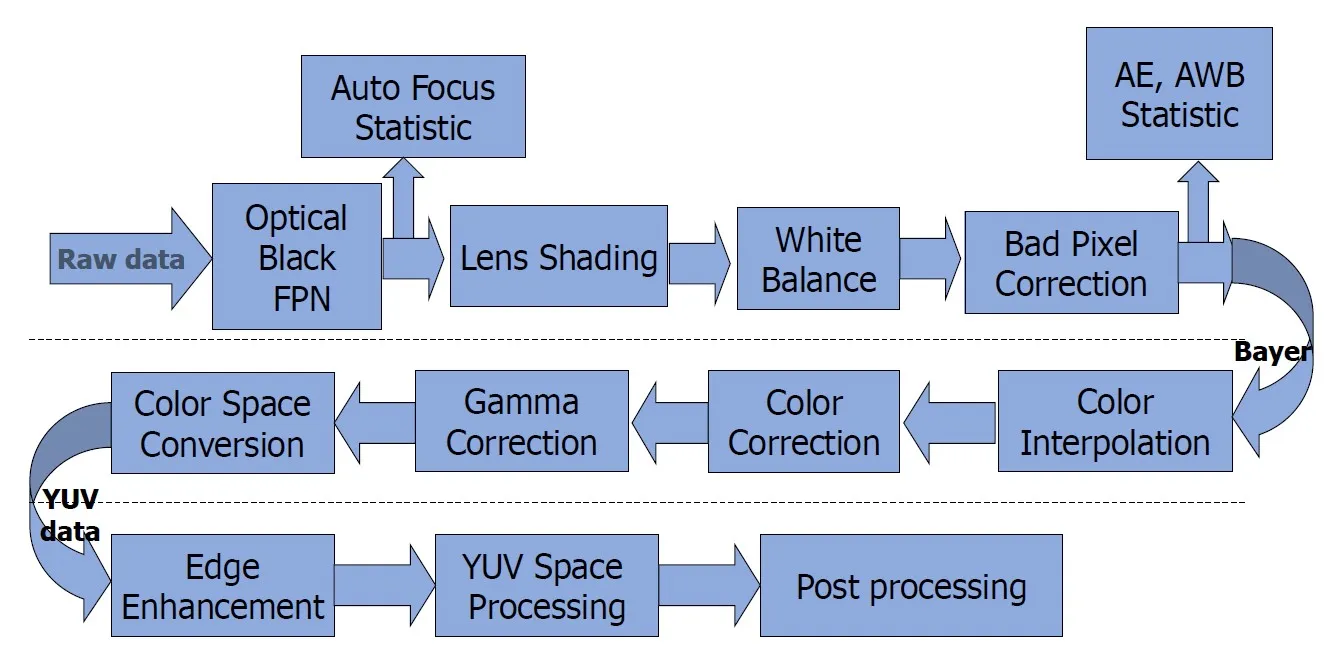 图3 ISP Pipeline
图3 ISP Pipeline
相机系统中的图像信号处理器(ISP)将图像传感器捕捉到的RAW图像处理成最终图像。为了获得最佳图像质量,必须针对不同的光照条件和场景,迭代配置图像信号处理器(ISP)参数。由于需要优化的ISP参数数量众多,调优过程可能需要数周甚至数月的时间。
3、ISP算法简介
使用"拜耳转换"来获得彩色图像:拜耳滤色镜,或称彩色滤光片阵列(CFA),起到显示器的作用,允许特定颜色的光子进入传感器上的每个像素。这些传感器在每个光敏点捕捉红、绿、蓝三种颜色。只有蓝色光子才能穿过蓝色滤光片,同样,只有红色和绿色光子才能穿过红色和绿色滤光片。然后,通过一种称为"去马赛克"的技术,将这些感光点的值智能地合并以创建全彩色像素,并进一步使用ISP(图像信号处理)流水线方法进行处理,以获得高质量图像。
成像算法是一套为各种用例开发的定制算法,用于在各种条件下实时增强图像;例如:
-
3A算法(自动白平衡、自动对焦、自动曝光)
-
低光增强
-
高动态范围(HDR)算法
-
软件图像处理流水线
-
立体相机视觉算法
-
用于散景和重聚焦应用的阵列相机软件处理流程
-
ToF相机传感器的深度图生成
-
空间和时间噪声去除
-
基于多帧和单帧的超分辨率
-
电子图像稳定(EIS)
一组3A算法(自动曝光、自动平衡和自动对焦)控制着相机的曝光、白平衡和对焦。
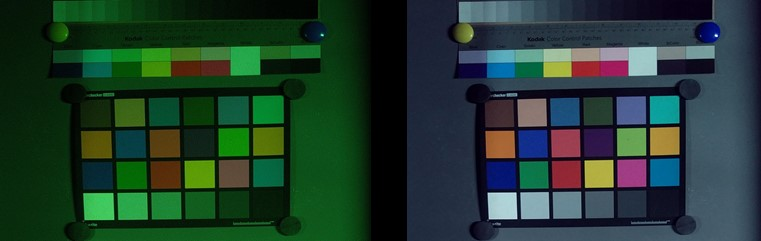 图4 Example of Untuned vs tuned Auto White Balance (AWB) (Source: PathPartner)
图4 Example of Untuned vs tuned Auto White Balance (AWB) (Source: PathPartner)
**自动曝光(AE)**是ISP的核心功能之一,其主要目的是根据场景的光线条件自动调整图像传感器的曝光参数,以确保图像亮度适中,避免过曝或欠曝。AE的实现依赖于ISP对图像亮度的实时分析,并通过控制光圈、快门速度和传感器增益来调整曝光量。
- 工作原理:ISP通过内置的测光系统(Exposure Meter)获取图像的亮度信息,并根据这些信息计算出最佳的曝光设置。例如,在强光环境下,ISP会减少曝光时间或降低传感器增益;而在弱光环境下,则会增加曝光时间或提高增益。
**自动白平衡(AWB)**是ISP的另一项关键功能,其作用是消除不同光源对图像颜色的影响,使图像中的白色物体在各种光照条件下都呈现真实的白色。AWB的核心在于模拟人类视觉系统的颜色恒常性,从而在不同色温下保持色彩的准确性。
- 工作原理:ISP通过分析图像中的颜色分布,特别是白色区域的RGB值,来估计当前光源的色温,并据此调整RGB增益,使图像中的白色物体在不同光源下都呈现为白色。例如,在日光下,色温约为5000K,而在钨丝灯下,色温较低,约为2700K,因此需要不同的白平衡调整。
**自动对焦(AF)**是ISP实现图像清晰度的重要手段。AF通过实时分析图像的对比度或边缘信息,找到最清晰的聚焦位置,从而确保图像主体清晰可见。
- 工作原理:AF通常采用对比度检测方式,即在图像中寻找对比度最高的区域作为聚焦点。一些高端ISP还支持相位检测(Phase Detection)或深度学习算法,以实现更快、更精准的对焦。
低光增强------在极低光照条件下提升图像质量:
-
自动色彩增强
-
传感器独立实现
-
支持Bayer和YUV两种格式
-
无细节损失的二维降噪
 图5 Without low light enhancement (L) and with low light enhancement (R) ((Source: PathPartner)
图5 Without low light enhancement (L) and with low light enhancement (R) ((Source: PathPartner)
**高动态范围(HDR)**图像/视频------解决低成本相机常见的动态范围问题。它提升了像素质量,使观众能够看到更逼真的图像/视频。
-
图像配准和去重影算法
-
通过访问相机驱动程序和HAL,可轻松移植到定制硬件解决方案中
-
高效的多曝光图像融合方法,能够保留每幅图像中的最佳信息
 图5 Representing a large luminance variation from dark values to bright values.
图5 Representing a large luminance variation from dark values to bright values.
**坏点校正(Dead Pixel Correction, DPC)**是一种用于修复图像传感器中失效或损坏像素的技术,以确保图像质量。坏点通常表现为图像中的黑色、白色或固定颜色的像素,可能由于传感器制造缺陷或长期使用导致。DPC通过检测这些异常像素并用周围正常像素的值进行插值或补偿,消除图像中的瑕疵,保证图像的整体质量和细节表现
**黑电平校正(Black Level Correction, BLC)**是图像信号处理(ISP)中的一项关键步骤,用于消除图像传感器在无光照条件下输出的非零亮度值,从而确保图像在进入后续处理模块(如自动白平衡、色彩校正等)之前具有正确的基线电平。BLC不仅影响图像的暗部细节保留,还对整体色彩平衡和图像质量有重要影响。
黑电平的成因与作用
黑电平的产生主要源于两个因素:一是传感器电路中的暗电流(dark current),这是由于光电二极管在无光照条件下仍会产生微弱电流,导致输出电平不为零;二是A/D转换器的精度限制,无法将非常小的电压值转换为数字信号,从而导致暗部细节丢失。为了保留暗部细节,传感器通常会在输出信号中添加一个固定的偏移量,使得在全黑条件下,输出像素值不会为0
ISP(Image Signal Processor)中的**Lens Shading Correction(LSC)**是一种用于校正图像亮度和色彩不均匀性的关键技术。它通过调整图像中不同区域的亮度和颜色增益,使图像在中心和边缘区域的亮度和颜色保持一致,从而提升图像质量。以下是关于ISP中Lens Shading Correction的详细解释:
Lens Shading 是由于镜头的光学特性导致的图像亮度或色彩不均匀现象。具体来说:
-
Luma Shading:图像中心到边缘的亮度逐渐降低,这是由于镜头对光线的折射不均匀造成的。
-
Color Shading:不同颜色的波长不同,经过镜头折射后,不同颜色的光线在图像中分布不均,导致中心和边缘的颜色差异。
**固定模式噪声(Fixed Pattern Noise, FPN)**是图像传感器中常见的问题,尤其在CMOS图像传感器中更为显著。FPN主要由传感器制造过程中的工艺偏差导致,例如像素间光电二极管的尺寸、掺杂浓度、MOS场效应管参数等的不一致,这些因素会导致像素输出信号的变化,从而产生固定位置的噪声。这种噪声在图像中表现为固定位置的亮点或暗点,严重影响图像质量。
为了消除FPN,图像信号处理器(ISP)通常采用多种校正方法。一种常见的方法是基于暗电流的校正方法。该方法利用暗电流与积分时间成线性关系的特点,通过采集不同积分时间下的本底图像,并计算像元校正系数矩阵,从而消除由读出放大器引入的偏置噪声。
小结:ISP算法还有很多,不一一举例,其主要去向是中控大屏直接给驾驶员观察,或者去自动驾驶域,进入自动驾驶算法模块中。