摘要
尽管人工智能自动驾驶汽车(AI-AVs)带来了诸多益处,如提升道路机动性与通行能力、降低死亡率以及减少排放,但它们也带来了新的威胁,这些威胁与网络安全威胁相互交织,正在改变网络安全的威胁格局。人工智能自动驾驶汽车可能被用作移动情报收集工具,用于间谍活动和监视。它们还可能被武器化,用于实施物理(物流和运输方面)或隐秘的网络攻击。人工智能自动驾驶汽车还引发了关于数据隐私、治理和伦理方面的担忧。因此,建立一个国内外通用的人工智能自动驾驶汽车跨学科缓解框架,以应对人工智能自动驾驶汽车带来的威胁至关重要。本研究着重探讨人工智能自动驾驶汽车威胁的解决方案,并通过跨学科框架缓解方法来解决这些问题,该方法帮助社会、国家和个人为不断发展的交通技术、人工智能应用的兴起及其带来的威胁做好准备,尽管这些技术带来了革命性的益处。研究人员提出了一种跨学科方法,该方法融合了战略和弹性方法,涉及交通部门道路安全管理机构以及所有参与联盟的实体,如人工智能自动驾驶汽车制造商、交通利益相关者、立法者、安全倡导者、学术界、地方和外国实体。
引言
在这个卓越且持续的技术进步时代,人工智能(AI)应用已扩展到几乎所有领域,不仅在自动驾驶汽车(AVs)所在的交通领域,还包括医疗保健、教育、航空等领域。过去无法突破或拓展的能力和局限,如今得到了改善和扩展,甚至有一天可能超越人类。如今,任何领域都有某种人工智能在后台运行,要么驱动流程、预测结果,要么直接做出驾驶决策。人工智能自动驾驶汽车(AI-AVs)被视为可持续的 mobility 技术,因为它们环保,有助于减少碰撞和交通拥堵,扩大机动性和道路容量,改善供应链和物流系统。尽管有这些益处,但也存在巨大的风险、安全问题以及意外的伦理和隐私方面的考虑。驾驶模式已从无自动化到部分自动化(0-2 级)发展到完全自动化(0-5 级)。人工智能现在为完全自动化驾驶级别提供动力,用于做出判断。人工智能自动驾驶汽车还引发了关于数据隐私和治理的担忧,以及道德和伦理方面的问题。
美国交通部(USDOT)及其附属机构国家公路交通安全管理局(NHTSA)做出了巨大努力,制定了自动驾驶汽车的安全指导计划,从 ADS 2.0、AV 3.0 到 AV 4.0。第一个计划是 2017 年 9 月发布的自动驾驶系统(ADS 2.0),作为安全指导的愿景计划。接下来是自动驾驶汽车 3.0(AV 3.0),该计划旨在为未来的自动驾驶汽车做准备,最后是自动驾驶汽车 4.0(AV 4.0),与其他指导计划一样,它不仅关注安全,还旨在确保自动驾驶汽车的自主性以及在自动驾驶汽车技术方面的领先地位(USDOT,未注明日期)。美国交通部与国家公路交通安全管理局还于 2016 年 9 月制定了《联邦自动驾驶汽车政策》,该政策包含自动驾驶汽车性能指导和范围的框架。
在审查联邦自动驾驶汽车政策框架时,我们发现其范围涵盖了参与自动驾驶汽车销售、测试、部署和开发的所有实体。该指导方针明确了自动驾驶汽车制造商必须关注的领域,以确保满足框架范围的安全要求(USDOT)。联邦自动驾驶汽车政策和美国交通部安全指导方针存在的问题是它们不具有强制性。它们是为了符合联邦机动车安全标准(FMVSS)而制定的。该框架更侧重于道路安全和车辆乘员安全。如今,自动驾驶汽车制造商,即人工智能自动驾驶汽车制造商,仅遵守该框架以表明其人工智能自动驾驶汽车的测试、部署和设计包含安全因素,且符合传统的联邦机动车安全标准。目前尚不清楚国家公路交通安全管理局是否会将框架的某些领域定为强制性要求。与此同时,国内外的自动驾驶汽车制造商正在部署仅符合传统联邦机动车安全标准的人工智能自动驾驶汽车,这为新的网络安全和新兴技术威胁打开了大门,因为已部署的人工智能自动驾驶汽车包含了更多功能,必须通过缓解框架来解决这些问题。
缓解框架对于帮助界定和解决人工智能自动驾驶汽车安全中被忽视的领域至关重要。制造商可能会遵守美国交通部和国家公路交通安全管理局的联邦自动驾驶汽车政策框架中的车辆性能要求,但该框架不具有强制性,因此建立一个从网络安全和人工智能角度应对人工智能自动驾驶汽车测试、部署和开发过程中引入的安全威胁的缓解框架非常重要。该缓解框架将通过增加来自网络安全和人工智能视角的威胁缓解框架,为车辆性能指导框架中的安全评估提供支持。这项研究对于帮助社会、国家和个人为交通的持续发展以及人工智能应用嵌入自动驾驶汽车后带来的威胁做好准备至关重要。本研究的目的是开发一种跨学科方法,该方法融合战略和弹性方法,涉及交通部门道路安全管理机构以及所有参与联盟的实体,如人工智能自动驾驶汽车制造商、交通利益相关者、立法者、安全倡导者、学术界、地方和外国实体。
文献综述
人工智能自动驾驶汽车(AI-AVs)依靠不同的层级在道路上导航。Priscila 等人强调了人工智能自动驾驶汽车如何严重依赖感知层、网络层和应用层来应对交通状况。他们指出每个层级还依赖于不同的其他设备,认为感知层依赖于摄像头、传感器、导航和位置数据。他们还强调网络层依赖于宽带、卫星和移动通信设备。最后,他们解释了应用层如何依赖人机界面,存储、处理和处理所有数据。过去的文献综述中进行了多项实验,证明了对这些层级的成功网络攻击。此外,每个层级中使用的设备也存在漏洞,可能被威胁行为者利用,从而控制人工智能自动驾驶汽车。我们回顾了当前和过去文献中的攻击、漏洞和实验,并将其按感知层、网络层和应用层进行分组,以了解人工智能自动驾驶汽车技术和潜在威胁,这将有助于开发缓解框架。
感知层
许多研究通过感知层证明了人工智能自动驾驶汽车的漏洞和威胁。Petit 等人在利用 MobileEye 摄像头漏洞的传感器实验中首次发现并指出了这一点。他们特别利用了 MobileEye C2-270 和激光雷达(ibeo LUX 3)的漏洞。Bhupathiraju 等人在激光雷达传感器上进行的类似实验也证明了自动驾驶汽车感知层的脆弱性。他们证明,由于电磁信号的对抗性干扰,针对激光雷达传感器的飞行时间(TOF)电路,会使人工智能自动驾驶汽车出现异常行为,导致感知层对事物进行错误分类,看到不存在的物体和虚假障碍。MobileEye 摄像头是全球人工智能自动驾驶汽车中使用最广泛的摄像头,有 4000 万个摄像头安装在人工智能自动驾驶汽车中。 McAfee 高级威胁研究(ATR)进行了为期 18 个月的研究,重点关注感知层的数字攻击。他们利用了 MobileEye 在黑盒(即对抗性机器学习(AML))和白盒中的漏洞。他们能够在检测物体和速度标志时通过假阴性和假阳性来迷惑分类器。Eykholt 等人通过在停车标志上使用油漆和贴纸进行物理攻击证明了这一点。他们成功迷惑了特斯拉 X 的 MobileEye 摄像头,使其将 35 英里 / 小时误分类为 85 英里 / 小时,将停车标志误分类为附加车道,将 35 英里 / 小时误分类为 45 英里 / 小时。
网络层和应用层
已有概念验证和实验表明,自动驾驶汽车可能通过网络层和应用层被入侵。第一次是在 2015 年,有人利用手机使自动驾驶汽车失效。第二次是应用层攻击,随后是网络层攻击,类似于 Miller 和 Valasek 的实验。不过,他们利用了特斯拉(Model S)的 WEB 工具浏览器漏洞,通过手机注册并使特斯拉汽车失效。研究人员还在另一辆特斯拉 Model S 和 Model X 上进行了类似的成功攻击实验,攻击了网络层。最近在 2024 年,两位安全研究人员 Talal Haj Bakry 和 Tommy Mysk 证明,通过中间人(MiTM)钓鱼攻击,攻击者可以执行强大的操作,包括注册新钥匙、劫持账户,甚至完全夺走特斯拉汽车。Talal Haj Bakry 和 Tommy Mysk 表示,针对特斯拉应用程序 v.4.30.6 和软件版本 11.1 2024.2.7 的攻击取得了成功。这两位安全研究人员还报告说,他们利用该版本的漏洞,创建了一个与大多数特斯拉充电站相同名称的中间人 SSID 网络来诱骗用户。
人工智能自动驾驶汽车在网络层、应用层和感知层面临的网络攻击、实验和威胁在国内外环境中都存在。在国内环境中,不良行为者可能利用国内制造商的人工智能自动驾驶汽车漏洞进行网络攻击,对人员、国家关键基础设施和生态系统造成巨大负面影响。对于在各国部署的外国人工智能自动驾驶汽车,其带来的威胁更为严重,因为这涉及外国实体、制造商、政府、伦理、数据隐私、国家安全和地缘政治冲突。这可能导致国家层面利用人工智能自动驾驶汽车来获得对其他国家的优势。
人工智能自动驾驶汽车框架、差距与见解
截至本研究撰写之时,自动驾驶汽车的框架、指导方针和标准包括美国交通部 / 国家公路交通安全管理局制定的联邦自动驾驶汽车政策、2014 年的 NIST(DOT HS 812073)以及 ISO/SAE 21434。联邦自动驾驶汽车政策框架虽然不具有强制性,且仅关注自动驾驶汽车安全,但它具有一定的范围和流程指导,高性能自动驾驶汽车(HAV)制造商强烈建议采用这些指导以确保其车辆对道路、驾驶员、乘员和周边基础设施安全。现有非强制性框架中的高性能自动驾驶汽车指导方针也是研究人员认为国家公路交通安全管理局默认向扩展人工智能应用的人工智能自动驾驶汽车制造商推荐的内容。然而,该框架推荐了更多有用的指导方针,尽管是非强制性的,但这对于人工智能自动驾驶汽车 / 高性能自动驾驶汽车制造商来说是一个良好的开端,有助于解决不仅涉及安全,还包括其他方面的问题,如图 1 所示,例如自动驾驶汽车的网络安全、传输中和静态数据、伦理、驾驶员培训等诸多领域。国内外都做出了许多努力并建立了合作伙伴关系,例如国内的 NIST 和国际的 ISO,以提出应对道路车辆风险的标准。
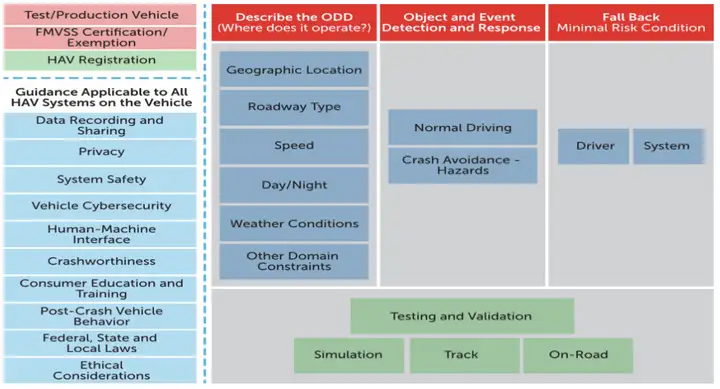
图 1:美国国家公路交通安全管理局联邦自动驾驶汽车政策:自动驾驶汽车实施框架
美国国家标准与技术研究院(NIST)已与美国交通部和国家公路交通安全管理局合作,于 2014 年 10 月建立了第一个应用于现代汽车的美国国家标准与技术研究院网络安全风险管理框架(NIST-C/RMF)。这些标准是通过审视不同标准制定的,如 NIST SP 800 系列、联邦 FIPS 199 和 200、初始道路车辆安全标准(ISO 26262)、EVITA(汽车电子安全入侵保护应用)、RTCA DO-178C、联邦航空局网络安全认证与授权以及汽车工程师学会车辆电气系统安全委员会的任务组、汽车安全指南和风险开发 TF 2。McCarthy 和 Harnett提出的框架(见图 2)没有具体规定用于管理道路车辆风险的技术和工具。然而,该框架仅在 NIST 风险管理框架的每个活动(如分类、选择、实施、评估、授权和监控)中列出了来自汽车工程师学会、NIST 等的基准和标准。
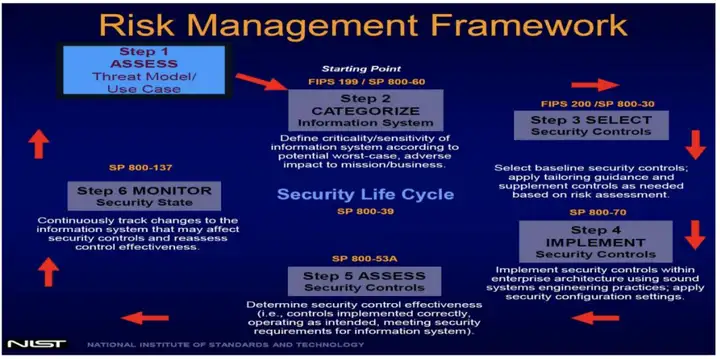
图 2:道路车辆风险管理框架
在国际上,国际标准化组织(ISO)最近为道路汽车制定了 ISO/SAE 21434 标准。ISO/SAE 21434:2021 标准规定了在自动驾驶汽车所用电气和电子系统(E/E)的各个阶段有效管理网络安全风险必须遵循的工程规范。这些阶段包括自动驾驶汽车电气和电子系统的概念策略、生产、运营、维护和退役。此外,该标准关注电气和电子系统及其功能、接口和抵御网络威胁的安全程序。最后,ISO/SAE 21434 鼓励进行威胁分析、有组织的网络安全管理、风险评估和持续的网络安全活动。与美国交通部 / 国家公路交通安全管理局和 NIST(DOT HS 812073)一样,ISO 标准仅用于合规目的,因此是非强制性的,且没有具体规定任何明确的网络安全解释、措施和技术。
随着人工智能在不同领域的快速应用,Habbal 等人发布了一个综合框架,称为 "AI TRiSM",即人工智能信任、风险和安全管理。AI TRiSM 专注于评估采用人工智能的系统和领域存在的问题。例如,AI TRiSM 的关键考虑因素是确保人工智能在自动驾驶汽车中的应用可靠、无偏见、适当,并保证隐私、治理和可信赖性。这个以人工智能为中心的框架旨在提高人工智能的信任度和可靠性,并监测和缓解新兴威胁。他们继续认为,像 AI TRiSM 这样以人工智能为中心的框架在建立人工智能信任方面至关重要,而现有框架和标准要么未能评估人工智能威胁和风险,要么未能适当地对与每个系统中人工智能应用相关的风险进行评估。他们还强调,AI TRiSM 框架将帮助制造商、实体和任何应用人工智能的环境管理与安全和人工智能相关的威胁。
此外,美国国家标准与技术研究院最近开发了 NIST 人工智能风险管理框架(AI RMF 1.0)的第一版。该框架的第一版确立了三个核心:映射、测量和管理)。该框架的构建基于人工智能系统可能对人员、组织和生态系统造成的危害。AI RFM 1.0 是人工智能制造商确保人工智能系统可靠、安全、透明、有弹性、安全、负责任和隐私增强以及符合伦理的基本要求。
图 3 中的映射核心体现了责任、问责制和伦理,因为它要求人工智能系统制造商在开发其人工智能产品之前,首先理解其人工智能系统将对人员、基础设施(生态系统)和组织(实体、国家等)产生的目标、目的和危害。进行这种评估可确保制造商了解未来的影响,并最终决定是否应该开发和部署其人工智能系统。一旦人工智能系统制造商决定开发和部署其人工智能产品或应用,就进入测量核心阶段。测量核心确保人工智能制造商不仅识别、量化和定性人工智能风险,还对其进行处理,以确保正在开发或即将部署的人工智能系统安全、可靠、透明,并全面增强隐私保护。在管理核心阶段,一旦人工智能系统制造商对风险进行了量化、定性和处理,他们必须实施风险管理措施,以防止可能出现的现有或新的人工智能威胁。NIST AI RMF 1.0 以治理作为所有三个核心的驱动力,确保人工智能制造商致力于优先考虑人工智能风险管理。
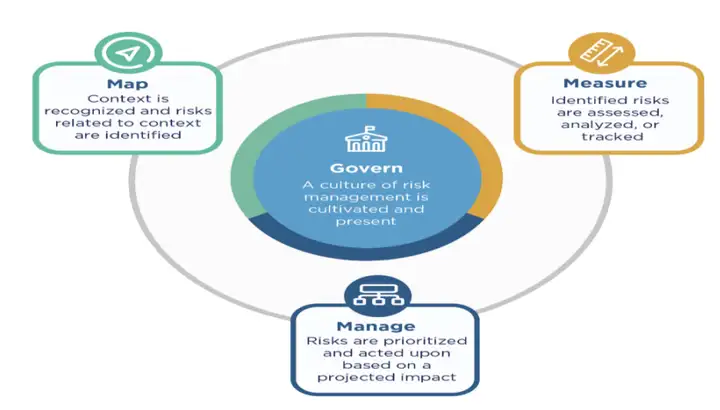
图 3:NIST AI RMF 1.0 的核心
本节回顾的现有框架和标准为由于人工智能集成和交通领域应用扩展而带来的自动驾驶汽车能力扩展奠定了基础。然而,这些标准和框架在其制定过程中没有包含 NIST AI RMF 1.0 以及人工智能信任、风险和治理。没有人工智能信任,现有框架仅触及了人工智能在自动驾驶汽车中实际应用的表面,即人工智能自动驾驶汽车所涉及的真正威胁和风险。然而,NIST AI RMF 1.0 和 AI TRiSM 框架旨在在消费者、国家和人工智能自动驾驶汽车制造商之间建立人工智能风险、信任和安全的平衡。
Habbal 等人认为,平衡这三个要素(信任、风险和安全)将确保人工智能自动驾驶汽车的伦理构想和部署得到遵守,使制造商在与消费者打交道和应对潜在人工智能威胁时保持透明、负责和公正。将这些要素初步整合到框架中,将确保人工智能应用的成功。因为这三个要素(信任、安全和风险)包括保护数据和资产,并确保人工智能集成能自动符合法律法规和标准,而传统(或现有)框架需要手动操作,这会导致人为错误、扩展性问题和耗时。
理论框架与方法论
评估人工智能自动驾驶汽车威胁的有效缓解框架必须以风险管理、治理和跨学科合作为理论方法。风险管理理论将指导如何识别人工智能自动驾驶汽车的风险,并制定保护、检测、响应和恢复措施。这一理论对人工智能自动驾驶汽车威胁至关重要,因为它通过识别列举出人工智能自动驾驶汽车(国内外)带来的所有威胁和挑战,并规定进一步的步骤,以保证对现有威胁的未来检测、安全防护以及响应和恢复手段。跨学科合作是必不可少的,涵盖人工智能自动驾驶汽车的构想、部署、安全、风险、信任、伦理、法律和标准的各个方面。跨学科理论建立了一个联合基准基础,涉及安全、风险、信任、伦理、人工智能自动驾驶汽车制造商、立法者、现有自动驾驶汽车框架以及其他关键实体,如国家公路交通安全管理局、美国交通部、美国国家标准与技术研究院和国际标准化组织。治理在风险管理和跨学科理论中都发挥着重要作用。因为它涉及确保人工智能自动驾驶汽车威胁缓解的行动、实体之间的合作、立法者以及缓解框架组成部分的任何其他方面。图 4 显示了拟议的理论跨学科合作,该合作考虑了人工智能自动驾驶汽车的风险管理、治理、跨学科方法以及现有的网络安全和自动驾驶汽车框架。这构成了本研究在人工智能自动驾驶汽车威胁缓解方面的第一个贡献。
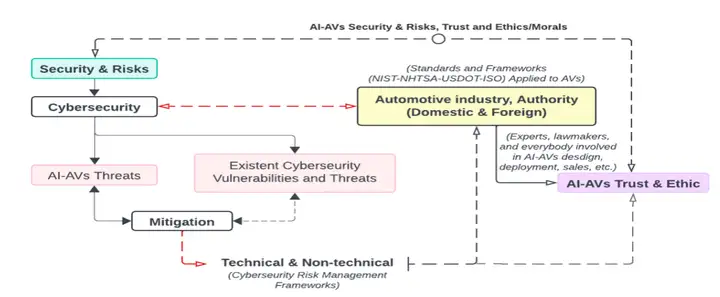
图 4:跨学科合作理论
研究人员通过分析现有自动驾驶汽车框架,然后将其特征适配到人工智能自动驾驶汽车,详细阐述了这种理论方法。从网络和技术角度来看,自动驾驶汽车和人工智能自动驾驶汽车带来的威胁是不同的。然后,他们从国内外角度分析了网络安全风险管理框架,并在此基础上加入了汽车行业以及所有参与人工智能自动驾驶汽车的实体(国内外),确立了人工智能自动驾驶汽车的安全性及其威胁缓解措施,同时确保有效建立伦理、信任和最佳实践。
缓解框架开发
除了国内外的人工智能自动驾驶汽车制造商外,关键的跨学科利益相关者从地方角度包括美国交通部、国家公路交通安全管理局、美国国家标准与技术研究院风险管理框架、AI TRiSM、美国国家标准与技术研究院人工智能风险管理框架 1.0、美国立法者、法律专家和工程师。由于自动驾驶汽车对人工智能的依赖,网络安全在定义人工智能自动驾驶汽车缓解框架时起着重要作用。如图 4 所示,与作为安全、数据隐私和标准支柱的网络安全相结合的是跨学科方法,以帮助缓解其他技术和非技术方面,如伦理、安全、信任和道德(见图 5)。
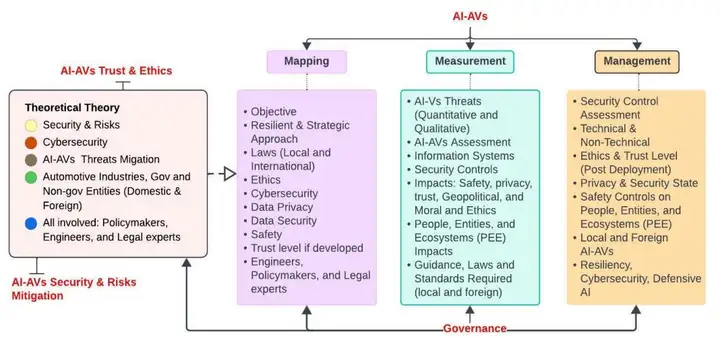
图 5:跨学科人工智能自动驾驶汽车威胁缓解框架(CD-AI-AVs-TMF)
CD-AI-AVs-TMF:治理
通过治理核心,该人工智能自动驾驶汽车威胁框架将风险管理作为整个威胁缓解框架周期的优先事项。治理核心使管理、测量、映射甚至理论核心成为强制性和不可或缺的部分。这鼓励所有参与人工智能自动驾驶汽车各个方面(如开发、部署、销售等)的实体(国内外)之间的知识共享。治理在该框架中起着关键作用,因为它通过来自不同框架、法律和标准(如美国国家标准与技术研究院、国际标准化组织、美国交通部 - 国家公路交通安全管理局、国家安全教育计划、国家网络安全战略)的知识共享,嵌入了其他框架。这使得能够制定适当的程序,确保人工智能自动驾驶汽车可信、安全、可靠,并总体上应用保护人员、实体(基础设施)和生态系统(PEE)的安全结构。
CD-AI-AVs-TMF:理论核心
理论核心是成熟的跨学科合作理论(图 4)。它汇集了人工智能自动驾驶汽车设计、部署以及最重要的人工智能在自动驾驶汽车中应用所涉及的关键方面。理论核心对于建立缓解预案至关重要,如人工智能自动驾驶汽车的信任、伦理、安全和风险缓解。在这一层面,框架确立了关注点和相关参与方的基准。个人、实体、立法者、工程师、法律专家、汽车行业、网络安全和安全理论也参与其中,通过优先考虑风险管理来支持治理。
CD-AI-AVs-TMF:映射
映射核心源自人工智能风险管理框架,作为初始核心,要求所有参与人工智能自动驾驶汽车(如理论核心所确立的)的各方在开发人工智能自动驾驶汽车之前,首先理解关键方面,如数据隐私、伦理、信任、安全、相关法律、网络安全、弹性,并确定其人工智能自动驾驶汽车的预期目标。所有参与方将利用来自美国国家标准与技术研究院风险管理框架的实践知识,为制造商提供技术和非技术见解,以识别人工智能自动驾驶汽车威胁,或利用法律专业知识识别伦理情境。人工智能自动驾驶汽车的映射包括从美国交通部 / 国家公路交通安全管理局和美国国家标准与技术研究院(DOT HS 812073)获取国内人工智能自动驾驶汽车制造商的理解,以及从国际标准化组织 / 汽车工程师学会 21434 获取外国人工智能自动驾驶汽车制造商的理解。
CD-AI-AVs-TMF:测量
映射核心识别了人工智能自动驾驶汽车的威胁,而测量步骤则对这些威胁进行了定性和定量分析。该核心从国内外角度应用,测量策略包括设计安全、数据保护、问责制、安全控制、对安全、隐私、道德和伦理的影响。人工智能自动驾驶汽车威胁的质量和数量将决定在管理核心应执行和优先考虑的风险管理技术和非技术方法,以确保人工智能自动驾驶汽车对人员、基础设施和生态系统是可信、符合伦理、安全的。
CD-AI-AVs-TMF:管理
管理是跨学科人工智能自动驾驶汽车威胁缓解框架(CD-AI-AVs-TMF)最重要的核心。在这一核心中,所有经过量化和定性的风险和威胁都得到管理。这是跨学科缓解措施最能付诸实践的地方。所有人工智能自动驾驶汽车的风险和威胁都通过应用网络安全领域的风险管理框架(美国国家标准与技术研究院风险管理框架、国际标准化组织标准、人工智能信任、美国国家标准与技术研究院人工智能风险管理框架 1.0)、汽车领域的标准(ISO/SAE 21434)、联邦标准(联邦信息处理标准 190/200)来缓解,同时还应用缓解伦理和道德问题的法律法规。该核心是一个持续的风险缓解过程,因为它借鉴了所有其他核心的合作和见解,同时包含可能出现的任何不可预见的威胁(技术和非技术)。人工智能自动驾驶汽车对人工智能的依赖程度越高,跨学科人工智能自动驾驶汽车威胁缓解框架的管理核心就越需要不断发展以应对新的风险。
讨论
在本地层面,跨学科人工智能自动驾驶汽车威胁缓解框架采取一切必要手段确保国家安全、数据隐私、伦理道德,以及人工智能自动驾驶汽车联邦法律法规的应用。任何国内人工智能自动驾驶汽车制造商不仅要使用跨学科人工智能自动驾驶汽车威胁缓解框架的映射、测量和管理核心,还要运用理论核心,以确保他们在所有方面(人员、基础设施和生态系统)遵守与人工智能自动驾驶汽车威胁和风险相关的当地法规。国内外的人工智能自动驾驶汽车都采用相同的跨学科人工智能自动驾驶汽车威胁缓解框架,然而,当它们进入国际市场时,必须遵守ISO/SAE 21434 标准。国内外的人工智能自动驾驶汽车在带来的威胁和风险方面有相似之处,但可能因部署国家的不同而有所差异。拟议的跨学科人工智能自动驾驶汽车威胁缓解框架有助于缓解这些威胁,然而,各国的法律法规不同,安全隐私甚至伦理的含义也可能不同。从网络安全角度来看,国内外的人工智能自动驾驶汽车采用相同的跨学科方法来缓解其人工智能自动驾驶汽车中的威胁。差异在于各国的政治、文化、观点和竞争对手。然而,这种差异并不会阻止拟议的跨学科人工智能自动驾驶汽车威胁缓解框架缓解与网络安全和人员、实体、生态系统相关的人工智能自动驾驶汽车重大威胁。
建议
必须持续努力和开展跨学科合作,以确保跨学科人工智能自动驾驶汽车威胁缓解框架在缓解与人工智能自动驾驶汽车相关的威胁和风险方面的有效性。参与人工智能自动驾驶汽车的利益相关者、人工智能自动驾驶汽车制造商、政策制定者、工程师、网络安全专家、法律专家、政府和非政府组织必须通过拟议的跨学科理论合作,共同扩展或创建与人工智能自动驾驶汽车威胁和风险相关的理论。人工智能将不断发展,其在自动驾驶中的应用将需要持续的跨学科协作,以纳入拟议理论中未涵盖的任何其他人工智能自动驾驶汽车威胁方面。在地方和全球层面加强跨学科合作的一种方式是促进所有参与人工智能自动驾驶汽车的各方之间的透明度和问责制。通过透明度和问责制,所有参与人工智能自动驾驶汽车的各方将合作交流解决人工智能自动驾驶汽车威胁和风险所需的信息。这也将使他们对未能建立跨学科人工智能自动驾驶汽车威胁缓解框架有效性所需的理论负责。先前作者多次建议的所有自动驾驶汽车指导方针中的非强制性方面仍然存在,因此这些方面必须具有强制性。本研究通过跨学科合作增加了对强制性、问责制和透明度的建议。
结论与未来工作
该研究强调了依赖感知层、网络层和应用层的人工智能自动驾驶汽车如何带来网络安全威胁,使人工智能自动驾驶汽车成为不可信的、用于情报收集和间谍活动的移动指挥中心。研究还强调,由于人工智能作为自动驾驶汽车的决策者,自动驾驶汽车容易受到人工智能攻击,除了数据隐私和伦理问题外,还可能导致物流灾难。缺乏应对人工智能自动驾驶汽车带来的威胁的跨学科方法不仅是一个差距,也是开发第一个跨学科人工智能自动驾驶汽车威胁管理框架(CD-AI-AVs-TMF)以增加价值和意义的原因。研究人员认为,网络安全对于缓解人工智能自动驾驶汽车威胁确实至关重要,然而,约束参与人工智能自动驾驶汽车设计和部署的制造商、立法者、政府和任何实体是全面了解人工智能自动驾驶汽车带来的实际威胁的唯一途径。
跨学科人工智能自动驾驶汽车威胁缓解框架(CD-AI-AVs-TMF)的开发考虑了人工智能自动驾驶汽车通过其映射、测量和管理核心对人员、实体和生态系统(PEE)造成的所有损害,这些核心借鉴了美国国家标准与技术研究院人工智能风险管理框架 1.0 和 AI TRiSM。考虑到人员、实体和生态系统基准,跨学科人工智能自动驾驶汽车威胁缓解框架有效缓解了人工智能自动驾驶汽车严重依赖的三个层级的任何威胁。跨学科人工智能自动驾驶汽车威胁缓解框架还通过适应性跨学科合作理论建立了人工智能信任水平和认可度,该理论提供了开发可信、透明的人工智能自动驾驶汽车所需的所有知识和见解。跨学科人工智能自动驾驶汽车威胁缓解框架通过跨学科合作引入问责制和透明度,以加强人工智能自动驾驶汽车设计的安全性和弹性。跨学科人工智能自动驾驶汽车威胁缓解框架对人工智能自动驾驶汽车未来的影响正是先前研究多次建议的强制性方面。此外,跨学科人工智能自动驾驶汽车威胁缓解框架的问责制和透明度的重要性可以通过另一项跨学科合作进一步研究,例如像美国的健康保险流通与责任法案(HIPAA)那样,在国内外对所有参与人工智能自动驾驶汽车的各方进行问责。