一、SN模块的定义与分类
SN模块在无人机系统中通常指辅助节点(Secondary Node)或特定飞控型号(如司南SN系列),其在遥控系统中的核心作用是增强控制可靠性、扩展功能或优化通信链路。主要分为两类:
1. 飞控系统SN模块:如司南(SN)系列飞控(SN-L、SN-N、SNF等),负责飞行姿态控制、导航及自主决策。
2. 通信辅助SN模块:在无线网络中作为辅助节点,提升无人机与地面站的通信质量(如5G NR中的多无线电双连接技术)。
二、运行方式详解
1. 飞控系统SN模块的运行流程
信号输入与处理
遥控器指令通过PPM/SBUS接收机输入SN飞控,飞控内置陀螺仪、加速度计和GPS模块实时采集姿态、位置数据。
多模式决策
支持8种飞行模式(如手动、自动返航、高度保持),通过通道切换触发模式选择,飞控依据传感器数据动态调整舵机与电机输出。
OSD与地面站交互
集成像素级OSD(屏幕显示系统),实时回传飞行参数(如高度、速度、电池电压);通过蓝牙或数传模块连接地面站软件(如SN_GCS),实现航点规划与参数调整。
2. 通信辅助SN模块的运行流程
动态节点添加
主节点(MN)基于无人机位置和飞行路径,向候选SN(如5G基站)发送波束准备请求,优化空口传输链路。
双连接协同
MN与SN通过X2/Xn接口协同,分担数据传输负载(如控制指令分发给MN,高清图传由SN处理),降低延时并提升可靠性。
三、代表功能与技术要点
1. 核心功能
下表概括了SN模块在飞控和通信中的核心功能:

详细说明:
姿态稳定与自主导航
采用PID闭环控制算法,结合空速计与GPS数据,实现自动巡航、返航路径规划。例如SN-N飞控支持垂起模式,需精确控制电机倾转时序。
地理围栏与失控保护
设置安全半径(如5km)和高度限制(如500m),超限自动触发返航;S.BUS接收机可自动识别信号丢失并切换至RTH(返航)模式。
数传与编队支持
支持MAVlink协议,实现多机位置共享与协同作业(如SN-N的友机位置显示功能)。
垂起模式适配
针对倾转垂起机型(如X2/Y3布局),需配置差动油门和舵面联动逻辑,防止过渡阶段失速。
2. 技术要点与难点
高精度传感器融合
难点:陀螺仪漂移、气压计温漂导致定高误差。解决方案:采用温度补偿算法,并依赖GPS/空速计冗余校验。
实时通信可靠性
难点:无人机高速移动引发多普勒频移,降低SN链路稳定性。解决方案:波束赋形技术与动态SN切换机制(如基于SA算法的轨迹优化)。
抗干扰设计
难点:电磁干扰(如电机电调)影响GPS信号。解决方案:硬件上优化LNA接收链路(如A2 GPS Pro Plus的滤波增强),软件上监控SNR健康值(>35为安全阈值)。
振动管理与安装校准
难点:振动导致姿态解算失真。解决方案:飞控需安装在重心附近,并执行六面加速度校准;振动点需分布于OSD显示的警戒线内。
四、典型飞控型号对比
下表对比了司南系列主要飞控型号的功能差异:
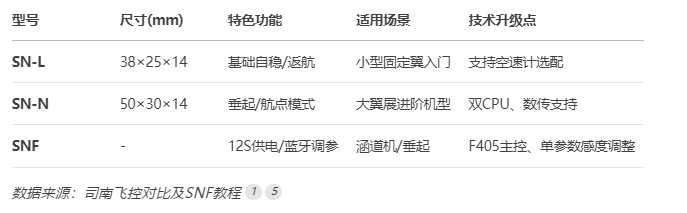
数据来源:司南飞控对比及SNF教程
五、应用趋势与挑战
趋势:
与高清图传(如DJI O4)深度集成,支持4K/120帧视频回传;
向AI决策演进(如基于动态规划的自主避障轨迹生成)。
挑战:
功耗平衡:功能扩展加剧能耗压力(如SN-N裸控重19.7g vs SN-L的14.8g);
协议兼容性:开源飞控(如ArduPilot)与私有协议(如SN_GCS)的互操作性不足。
未来技术将聚焦轻量化硬件、抗干扰通信(如OQPSK调制)及跨平台集成,以满足物流巡检等场景的高可靠需求。