=========================================================================
更多内容和历年真题请查看网站:【试卷中心 -----> 电子学会 ----> 机器人技术 ----> 五级】
青少年软件编程历年真题模拟题实时更新
=========================================================================
2025年6月 青少年等级考试机器人理论真题五级
第 1 题
ESP32 for Arduino,函数digitalWrite()向引脚输出高电平时,该引脚所对应的电压值是?( )
A:1.8V
B:3.0V
C:3.3V
D:5V
第 2 题
ESP32 for Arduino,下列选项中,函数analogSetWidth()所相关的外设是?( )
A:GPIO
B:DAC
C:PWM
D:ADC
第 3 题
ESP32 for Arduino,运算符sizeof(int)返回值是?( )
A:1
B:2
C:4
D:8
第 4 题
一位共阳数码管图示如下,在数码管显示数字"4"时,a~h引脚对应的电平是?( )
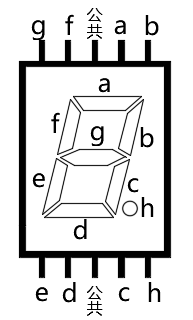
A:0,1,1,0,0,1,1,1
B:1,0,0,1,1,0,0,0
C:0,1,1,0,0,1,1,0
D:1,0,0,1,1,0,0,1
第 5 题
ESP32 for Arduino,读取按键开关的返回值,电路搭设如下图所示,下列选项中,关于引脚模式设置正确的是?( )
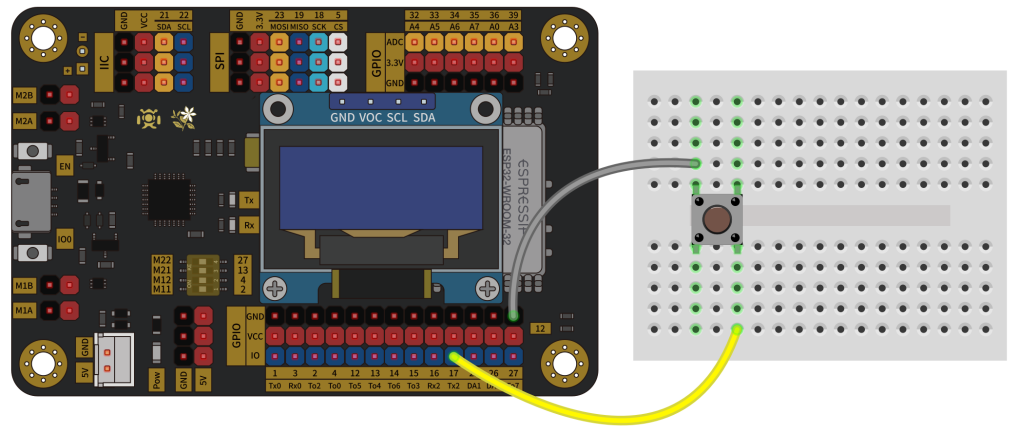
A:pinMode(17,INPUT);
B:pinMode(17,OUTPUT);
C:pinMode(17,INPUT_PULLUP);
D:pinMode(17,INPUT_PULLDOWN);
第 6 题
ESP32 for Arduino采用LEDC方式进行模拟输出时,函数ledcDetachPin()的功能是?( )
A:设置LEDC通道参数
B:将指定通道上的PWM信号输出到GPIO引脚
C:终止指定引脚的PWM信号输出
D:向指定通道输出PWM信号
第 7 题
ESP32 for Arduino函数ledcSetup(channel,freq,bit_num)中,设置PWM分辨率的参数是?( )
A:ledcSetup
B:channel
C:freq
D:bit_num
第 8 题
ESP32 for Arduino采用DAC外设进行模拟输出,函数dacWrite(val)中参数val的最大值是?( )
A:255
B:511
C:1023
D:4095
第 9 题
74HC595移位寄存器芯片,将移位寄存器中的数据写入到数据寄存器时,ST_CP引脚的电平状态是?( )
A:上升沿
B:下降沿
C:高电平
D:低电平
第 10 题
ESP32 for Arduino,电路如图所示,仅当按键释放时触发中断,对应的中断触发模式是?( )
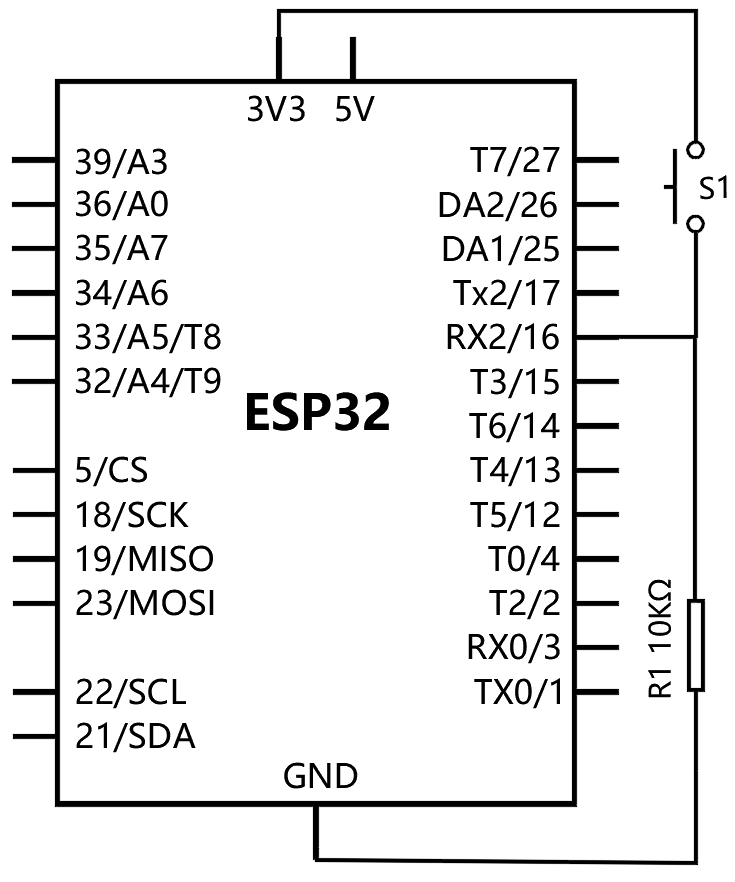
A:ONHIGH
B:CHANGE
C:RISING
D:FALLING
第 11 题
ESP32 for Arduino程序如下,串口监视器显示的结果是?( )
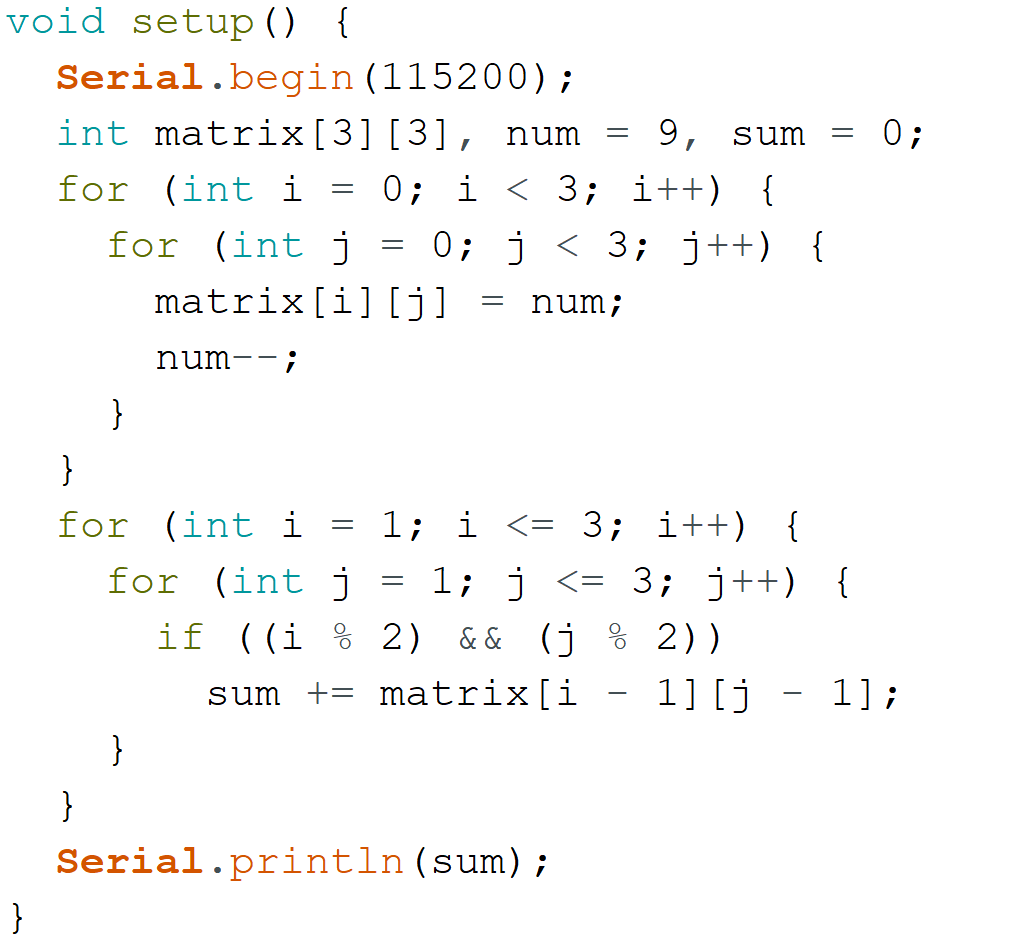
A:10
B:20
C:25
D:45
第 12 题
ESP32 for Arduino中,语句Serial.printf()中表示浮点输出的格式字符为?( )
A:%o
B:%d
C:%x
D:%f
第 13 题
016 << 2的值是?( )
A:32
B:56
C:64
D:88
第 14 题
0x32 ^ 0x47的结果是?( )
A:15
B:61
C:117
D:119
第 15 题
Serial类库的成员函数available(),其功能是?( )
A:返回接收缓冲区中的字节数
B:从缓冲区中读取数据
C:将数据输出到串口
D:设置串口的波特率
=========================================================================
更多内容和历年真题请查看网站:【试卷中心 -----> 电子学会 ----> 机器人技术 ----> 五级】
青少年软件编程历年真题模拟题实时更新
=========================================================================