OpenCV 提供了多种图像平滑(模糊)处理方法,用于减少图像噪声、平滑细节,常见的有以下四种:
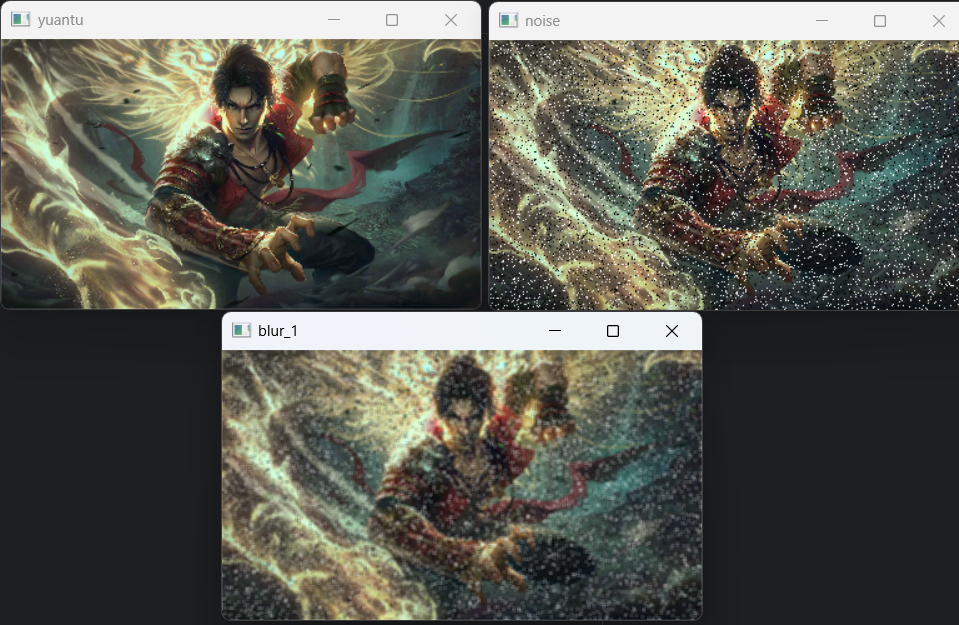
一、均值滤波(Mean Blurring)
原理 :用像素周围 n×n 邻域内所有像素的平均值替代该像素值。
特点:简单快速,但可能导致图像边缘模糊。
函数 :cv2.blur(src, ksize)
参数:src:输入图像
ksize:卷积核大小(如 (3,3)、(5,5)
代码实现:
python
import cv2
import numpy as np
# 对图片进行噪声处理
def add_peppersalt_noise(image,n=10000):
result = image.copy()
h,w= image.shape[:2] # 获取图片的高和宽
for i in range(n): # 生成n个椒盐噪声
x=np.random.randint(1,h)
y=np.random.randint(1,w)
if np.random.randint(0,2) == 0:
result[x,y]=0
else:
result[x,y]= 255
return result
#导入图片
image =cv2.imread('2197.jpg')
image = cv2.resize(image,dsize=None,fx=0.2,fy=0.2)# 对图片进行缩放
cv2.imshow('yuantu',image) # 原图
cv2.waitKey(0)
noise = add_peppersalt_noise(image) # 噪声处理后的图片
cv2.imshow('noise',noise)
cv2.waitKey(0)
# 均值滤波 blur
blur_1 = cv2.blur(noise,(3,3)) # 均值处理后的图片
cv2.imshow('blur_1',blur_1)
cv2.waitKey(0)
cv2.destroyAllWindows()结果:
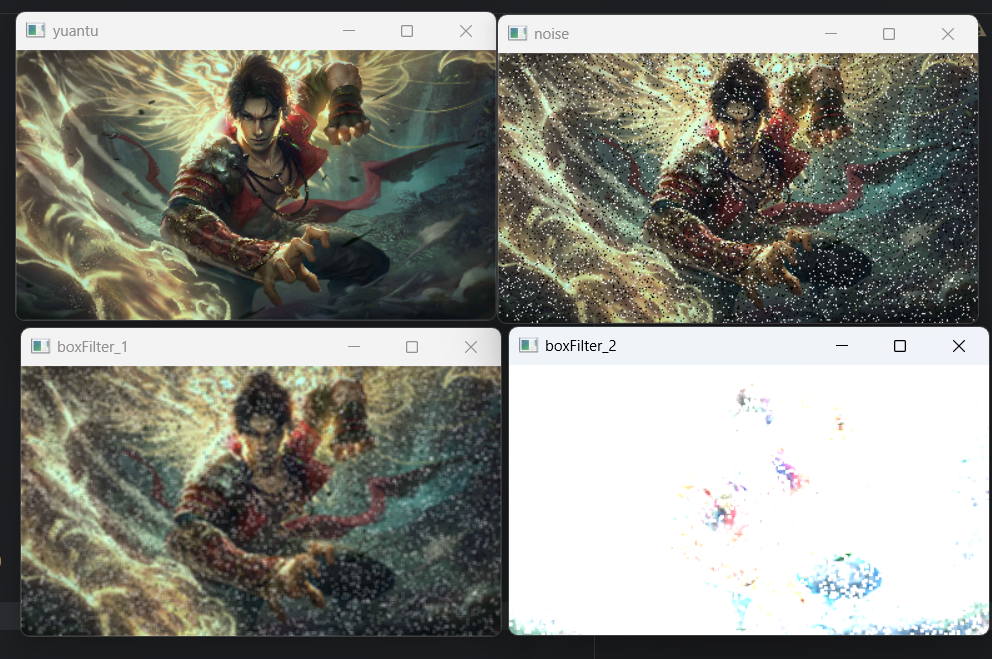
二、方框滤波 boxFilter
原理:方框滤波通过一个固定大小的矩形(方框)卷积核对图像进行卷积操作:
归一化方框滤波:计算方框内所有像素的平均值,替代中心像素值(效果与均值滤波完全一致)。
非归一化方框滤波 :计算方框内所有像素的总和(不除以方框面积),可能导致像素值溢出(需注意数据类型)
特点:计算简单快速,适合对实时性要求高的场景
函数:cv2.boxFilter(src, ksize,ddepth,normalize )
参数:src:输入图像(必须是单通道或多通道的 numpy 数组)。
ddepth :输出图像的深度(数据类型),通常设为 -1 表示与输入图像深度相同。
ksize :卷积核大小(如 (3,3)、(5,5)),必须是正奇数。
normalize:是否归一化(布尔值):
normalize=True(默认):归一化,等价于均值滤波(结果 = 像素和 / 方框面积)。normalize=False:非归一化,结果 = 像素总和(可能超过像素值范围,需后续处理)。
代码实现:
python
import cv2
import numpy as np
# 对图片进行噪声处理
def add_peppersalt_noise(image,n=10000):
result = image.copy()
h,w= image.shape[:2] # 获取图片的高和宽
for i in range(n): # 生成n个椒盐噪声
x=np.random.randint(1,h)
y=np.random.randint(1,w)
if np.random.randint(0,2) == 0:
result[x,y]=0
else:
result[x,y]= 255
return result
#导入图片
image =cv2.imread('2197.jpg')
image = cv2.resize(image,dsize=None,fx=0.2,fy=0.2)
cv2.imshow('yuantu',image)
cv2.waitKey(0)
noise = add_peppersalt_noise(image)
cv2.imshow('noise',noise)
cv2.waitKey(0)
# 方框滤波 boxFilter
boxFilter_1 =cv2.boxFilter(noise,-1,(3,3),normalize = True)
cv2.imshow('boxFilter_1',boxFilter_1)
cv2.waitKey(0)
boxFilter_2 = cv2.boxFilter(noise,-1,(3,3),normalize = False)
cv2.imshow('boxFilter_2',boxFilter_2)
cv2.waitKey(0)
cv2.destroyAllWindows()结果:
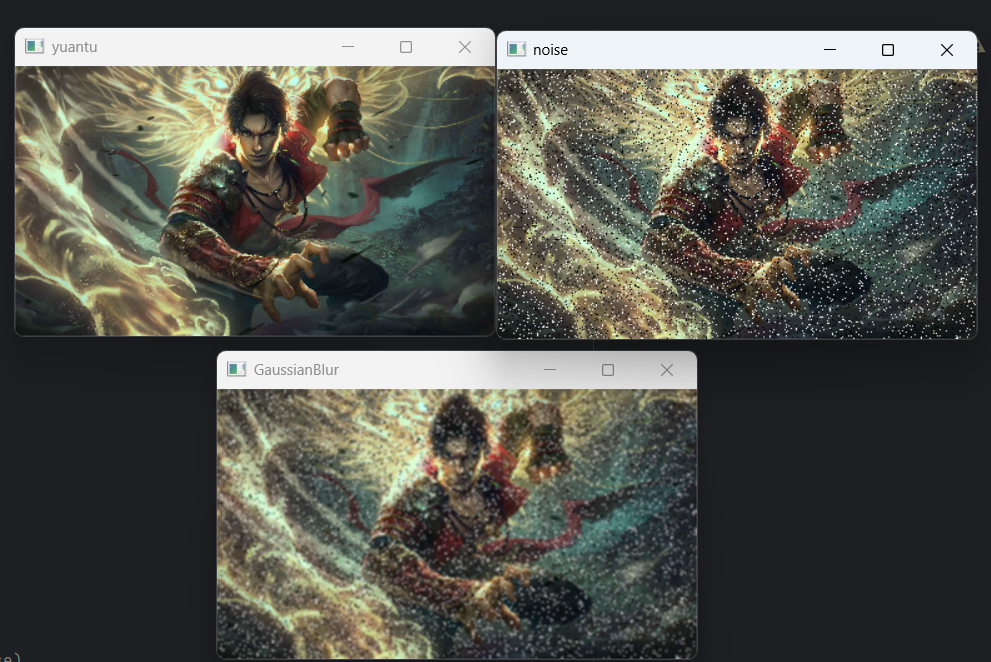
三、高斯滤波(Gaussian Blurring)
原理:用高斯函数生成的权重矩阵(中心像素权重更高,边缘像素权重更低)对邻域像素加权平均。
特点:比均值滤波更保留图像细节,对高斯噪声(如相机传感器噪声)效果好。
函数 :cv2.GaussianBlur(src, ksize, sigmaX,sigmaY)
参数:src:输入图像,通常是一个NumPy数组。 ksize:滤波器的大小,它是一个元组,表示在水平和垂直方向上的像素数量。例如。(5,5)表示一个5x5的滤波器。
siqmaX和siqmaY:分别表示在X轴和Y轴方向上的标准差。这些值与滤波器大小相同。默认持况下、它们都等于0,这意味着没有高斯模糊。
dst:输出图像,通常是一个NumPy数组。如果为None,则会创建一个新的数组来存储结果
代码实现:
python
import cv2
import numpy as np
def add_peppersalt_noise(image,n=10000):
result = image.copy()
h,w= image.shape[:2] # 获取图片的高和宽
for i in range(n): # 生成n个椒盐噪声
x=np.random.randint(1,h)
y=np.random.randint(1,w)
if np.random.randint(0,2) == 0:
result[x,y]=0
else:
result[x,y]= 255
return result
# 导入图片
image =cv2.imread('2197.jpg')
image = cv2.resize(image,dsize=None,fx=0.2,fy=0.2)
cv2.imshow('yuantu',image)
cv2.waitKey(0)
noise = add_peppersalt_noise(image)
cv2.imshow('noise',noise)
cv2.waitKey(0)
# 高斯滤波 GaussianBlur
GaussianB = cv2.GaussianBlur(noise,(3,3),1)
cv2.imshow('GaussianBlur',GaussianB)
cv2.waitKey(0)结果:
四、中值滤波(Median Blurring)
原理 :用像素周围 n×n 邻域内所有像素的中值替代该像素值。
特点:对椒盐噪声(图像中的黑白斑点)效果极佳,能有效保留边缘。
函数 :cv2.medianBlur(src, ksize,dst)
参数:src:输入图像。
ksize:滤波器的大小,它是一个整数,表示在水平和垂直方向上的像素数量。例如、5表示一个5x5的滤波器。
dst:输出图像,通常是一个NumPy数组。如果为None,则会创建一个新的数组来存储结果。
代码实现:
python
import cv2
import numpy as np
def add_peppersalt_noise(image,n=10000):
result = image.copy()
h,w= image.shape[:2] # 获取图片的高和宽
for i in range(n): # 生成n个椒盐噪声
x=np.random.randint(1,h)
y=np.random.randint(1,w)
if np.random.randint(0,2) == 0:
result[x,y]=0
else:
result[x,y]= 255
return result
# 导入图片
image =cv2.imread('2197.jpg')
image = cv2.resize(image,dsize=None,fx=0.2,fy=0.2)
cv2.imshow('yuantu',image)
cv2.waitKey(0)
noise = add_peppersalt_noise(image)
cv2.imshow('noise',noise)
cv2.waitKey(0)
# 中值滤波 medianBlur
medianB =cv2.medianBlur(noise,3)
cv2.imshow('medianBlur',medianB)
cv2.waitKey(0)
cv2.destroyAllWindows()结果:
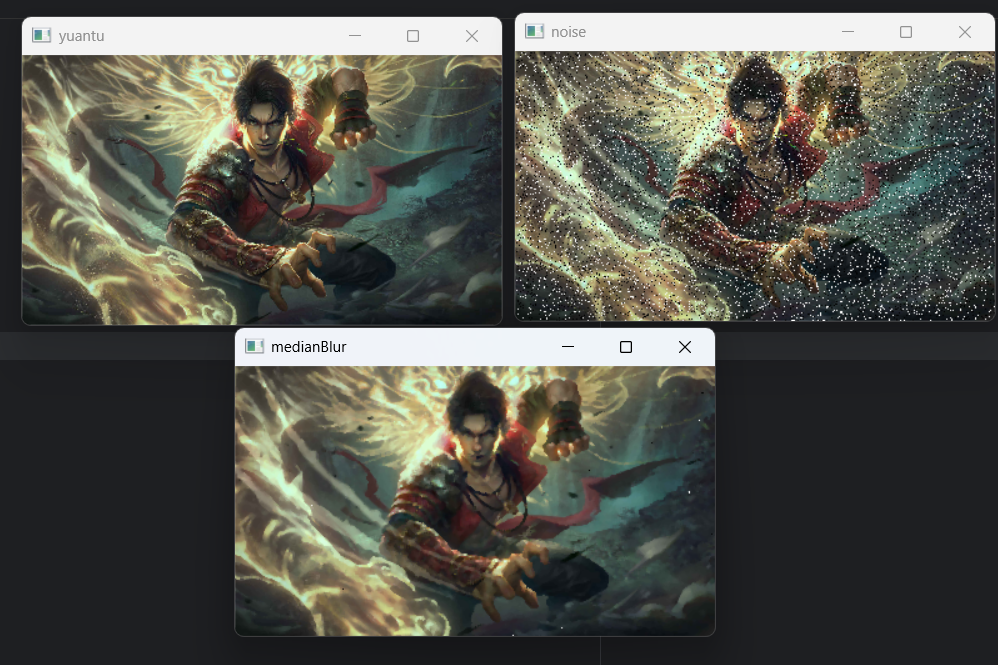
总结
由四种滤波方式得到的结果可以看到对于去除椒盐噪声 优先使用中值滤波。