决策树
1. 树模型本质
分类/回归:数据从根节点→叶子节点逐步决策,最终落在叶子节点。
2. 树的组成
根节点:第一个分裂的选择点。
非叶子节点:中间判断条件的过程。
叶子节点:最终决策的结果。
3. 训练 vs 测试
训练阶段:用训练集选择特征、切分节点。
测试阶段:按已建好的树路径直接进行预测。
4. 特征选择标准
熵:衡量数据不确定性(熵越低→数据不确定性越小)。
信息增益:特征分裂后熵的不确定减少的程度(增益越大→特征越优)。
5. 构造实例(以"14天打球"为例)
步骤:
-
计算原始熵(9打球/5不打球 → 熵=0.940)。
-
计算各特征(如Outlook)的条件熵和信息增益。
-
选增益最大的特征作为根节点,递归生成子树。
课堂练习:通过数据集构造决策树
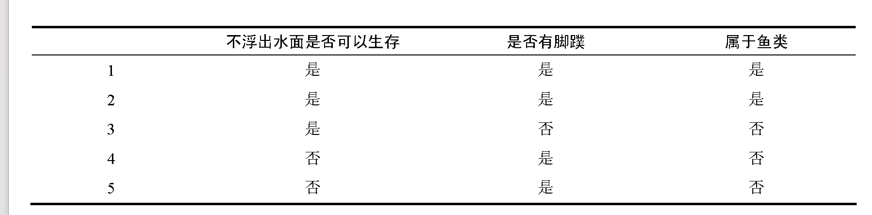
1、总熵:
E(D)=−k∑plog2(p)
(属于鱼类=是):2个(1、2)
(属于鱼类=否):3个(3、4、5)
熵≈0.971
2、信息增益
是:3(1、2、3)
熵:−(32log232+31log231)≈0.918
否:2(4、5)
熵:0
信息增益=0.420