使用RealSense相机和YOLO进行实时目标检测
在计算机视觉领域,实时目标检测是一个重要且具有挑战性的任务。本文将介绍如何使用Intel RealSense相机和YOLO(You Only Look Once)深度学习模型来实现高性能的实时目标检测系统。
项目概述
本项目结合了两个强大的技术:
- Intel RealSense D400系列相机 - 提供高质量的RGB图像和深度信息
- YOLOv8目标检测模型 - 实现快速准确的目标检测
通过整合这两项技术,我们可以构建一个实时目标检测系统,适用于机器人、安防监控、工业检测等多种应用场景。
系统架构
RealSense相机 → 图像采集 → YOLO模型 → 目标检测 → 结果显示环境准备
硬件要求
- Intel RealSense D400系列相机(D415、D435、D455等)
- 支持USB 3.0的计算机
- 足够的计算资源(推荐GPU加速)
软件依赖
bash
# 安装RealSense SDK
pip install pyrealsense2
# 安装YOLOv8
pip install ultralytics
# 安装其他依赖
pip install opencv-python numpy代码实现详解
1. RealSense相机封装类
python
class RealSenseCamera:
def __init__(self, serial_number=None):
self.pipeline = rs.pipeline()
self.config = rs.config()
# 配置RGB流
self.config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
def start(self):
# 启动相机管道
self.pipeline_profile = self.pipeline.start(self.config)
return True
def read(self):
# 读取帧
frames = self.pipeline.wait_for_frames()
color_frame = frames.get_color_frame()
frame = np.asanyarray(color_frame.get_data())
return True, frame
def stop(self):
# 停止相机
self.pipeline.stop()2. YOLO模型加载
python
def load_yolo_model(model_name="yolov8n.pt"):
model_path = Path(__file__).parent.parent / "models" / model_name
model = YOLO(str(model_path))
return model3. 检测结果显示
python
def draw_detections(image, results, class_names):
# 绘制边界框和标签
boxes = results[0].boxes
for box in boxes:
# 获取边界框坐标
x1, y1, x2, y2 = map(int, box.xyxy[0])
# 绘制边界框
cv2.rectangle(image, (x1, y1), (x2, y2), (0, 255, 0), 2)
# 添加标签
label = f"{class_name}: {conf:.2f}"
cv2.putText(image, label, (x1, y1 - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)性能优化策略
1. 跳帧处理
为了提高性能,我们采用跳帧策略,每5帧进行一次目标检测:
python
if frame_count % 5 == 0:
results = model(frame, conf=0.5, verbose=False)
last_detection_results = results2. 结果缓存
未检测的帧显示上一次的检测结果,避免显示闪烁:
python
if last_detection_results is not None:
display_frame = draw_detections(display_frame, last_detection_results, class_names)3. 实时性能监控
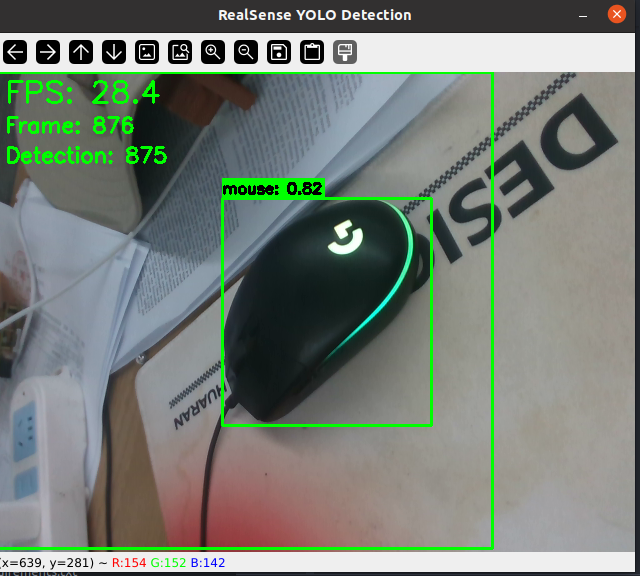
显示实时FPS和帧信息:
python
fps = frame_count / (current_time - start_time)
cv2.putText(display_frame, f"FPS: {fps:.1f}", (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)使用方法
1. 准备工作
确保以下文件和目录结构:
project/
├── models/
│ ├── yolov8n.pt
│ ├── yolov8s.pt
│ └── ...
└── testYolo/
├── realsense_yolo_detection.py
└── blog.md2. 运行程序
bash
cd testYolo
python realsense_yolo_detection.py3. 操作说明
- 程序启动后会自动检测并初始化RealSense相机
- 加载YOLO模型并开始实时目标检测
- 显示窗口中会实时显示检测结果
- 按 'q' 键退出程序
自定义配置
更换YOLO模型
在代码中修改加载模型的部分:
python
# 选择不同大小的模型
model = load_yolo_model("yolov8n.pt") # 最小最快
model = load_yolo_model("yolov8s.pt") # 小型模型
model = load_yolo_model("yolov8m.pt") # 中等大小
model = load_yolo_model("yolov8l.pt") # 大型模型
model = load_yolo_model("yolov8x.pt") # 最大最精确调整检测参数
修改目标检测的置信度阈值:
python
results = model(frame, conf=0.5, verbose=False) # 默认0.5修改跳帧频率
调整性能与实时性的平衡:
python
# 每N帧进行一次检测
if frame_count % N == 0:
# 进行目标检测常见问题与解决方案
1. 模型加载失败
错误信息: PytorchStreamReader failed reading zip archive
解决方案: 重新下载模型文件,确保文件完整性2. RealSense相机无法连接
错误信息: 无法启动RealSense摄像头
解决方案:
- 检查USB连接
- 确认设备驱动已正确安装
- 尝试重新插拔设备3. 检测结果显示闪烁
问题原因: 跳帧处理导致显示不稳定
解决方案: 已通过结果缓存机制优化,确保未检测帧显示上一次结果扩展应用
1. 多相机支持
扩展程序以支持多个RealSense相机同时工作
2. 深度信息融合
利用RealSense的深度信息,提供3D目标检测能力
3. 网络传输
将检测结果通过网络传输到其他设备或云端
4. 自定义模型
使用训练好的自定义模型进行特定场景的目标检测
性能基准测试
| 模型 | 图像分辨率 | 检测精度 | FPS (RTX 3080) | FPS (Intel i7) |
|---|---|---|---|---|
| YOLOv8n | 640×480 | 中等 | 35-40 | 15-20 |
| YOLOv8s | 640×480 | 高 | 25-30 | 10-15 |
| YOLOv8m | 640×480 | 很高 | 15-20 | 5-10 |
注:FPS数据基于跳帧处理(每5帧检测一次)
总结
本项目展示了如何将RealSense相机与YOLO模型结合,实现高性能的实时目标检测系统。通过合理的性能优化策略,我们可以在保证检测精度的同时,实现实时的检测效果。
该系统具有良好的扩展性,可以根据具体应用需求进行定制和优化。无论是学术研究还是工业应用,都可以作为很好的起点。