Week 1
1.1 K-means
Cluster centroid
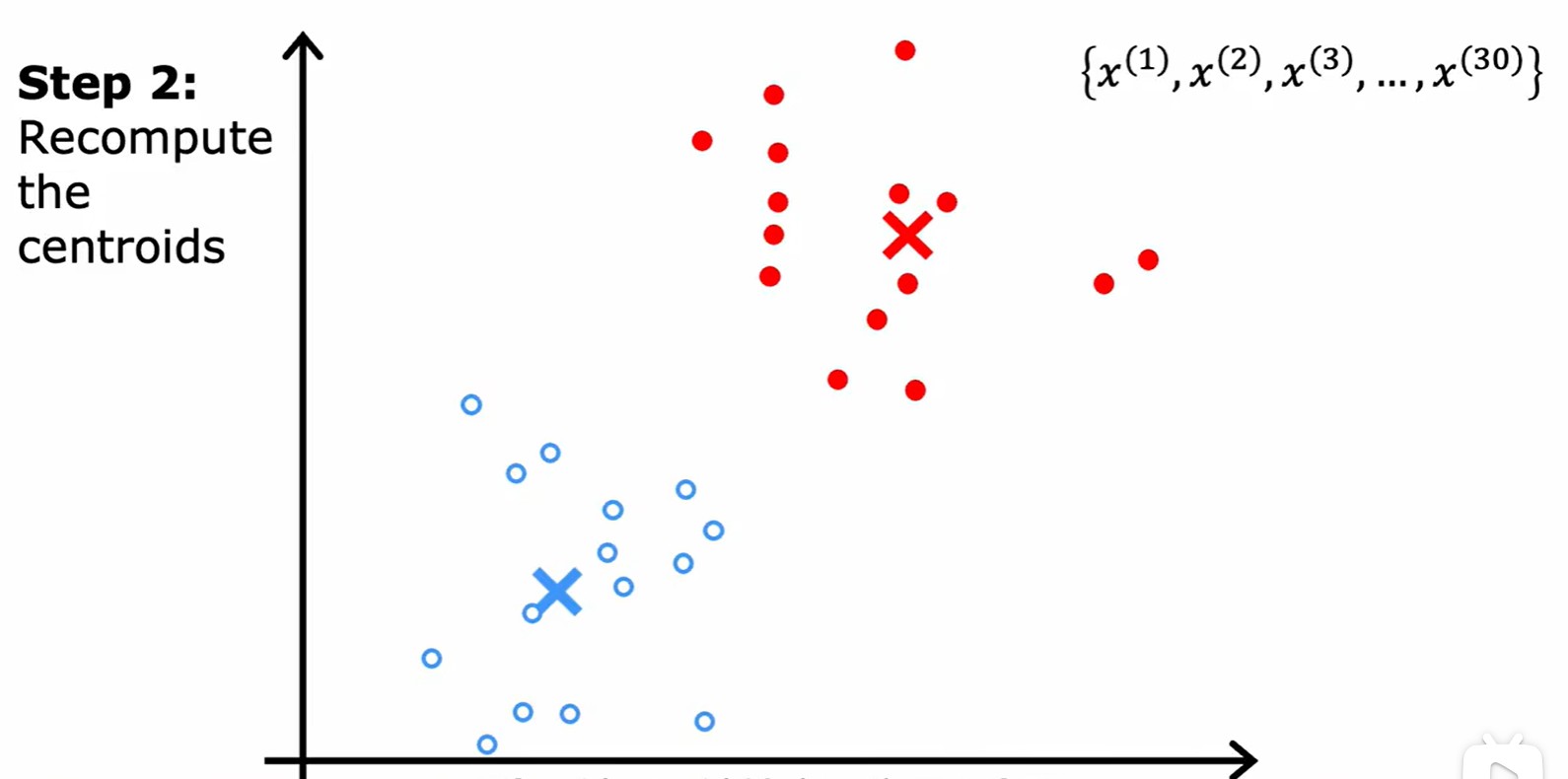
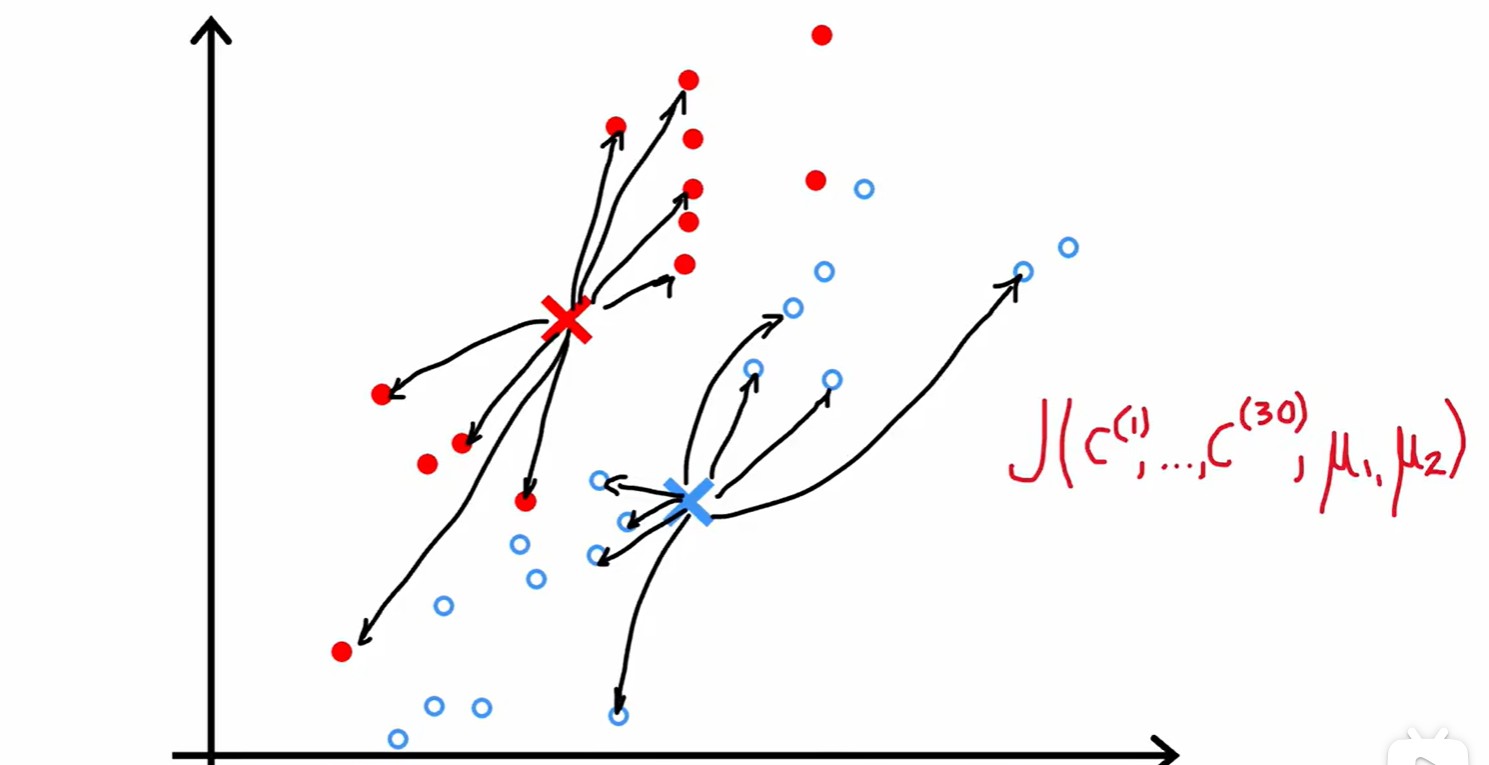
- K-means 是无监督学习中聚类算法的一种,核心在于更新聚类质心;
- 首先将每个点分配给几个聚类质心,取决于那些点离哪个质心更近;然后将几个聚类质心移动到分配给他的所有点的平均值,不断重复,直到没有点更改类别;
K-means algorithm
- 如果一个簇里面没有点分配给他,最常见的方法就是消除一个簇;
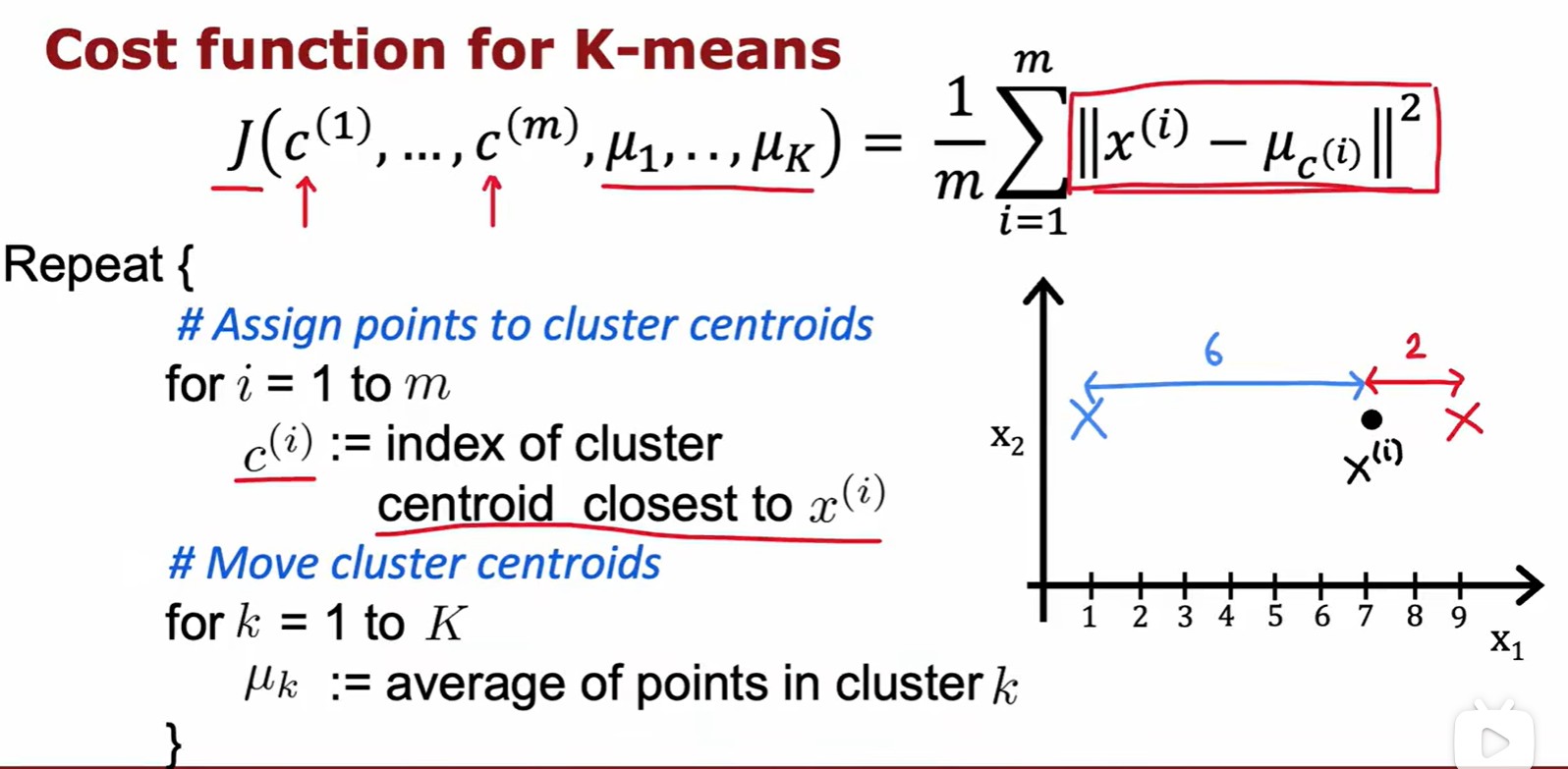
- 总的来说,减少 cost 的两步:就近分配中心点,中心点移动到平均点;
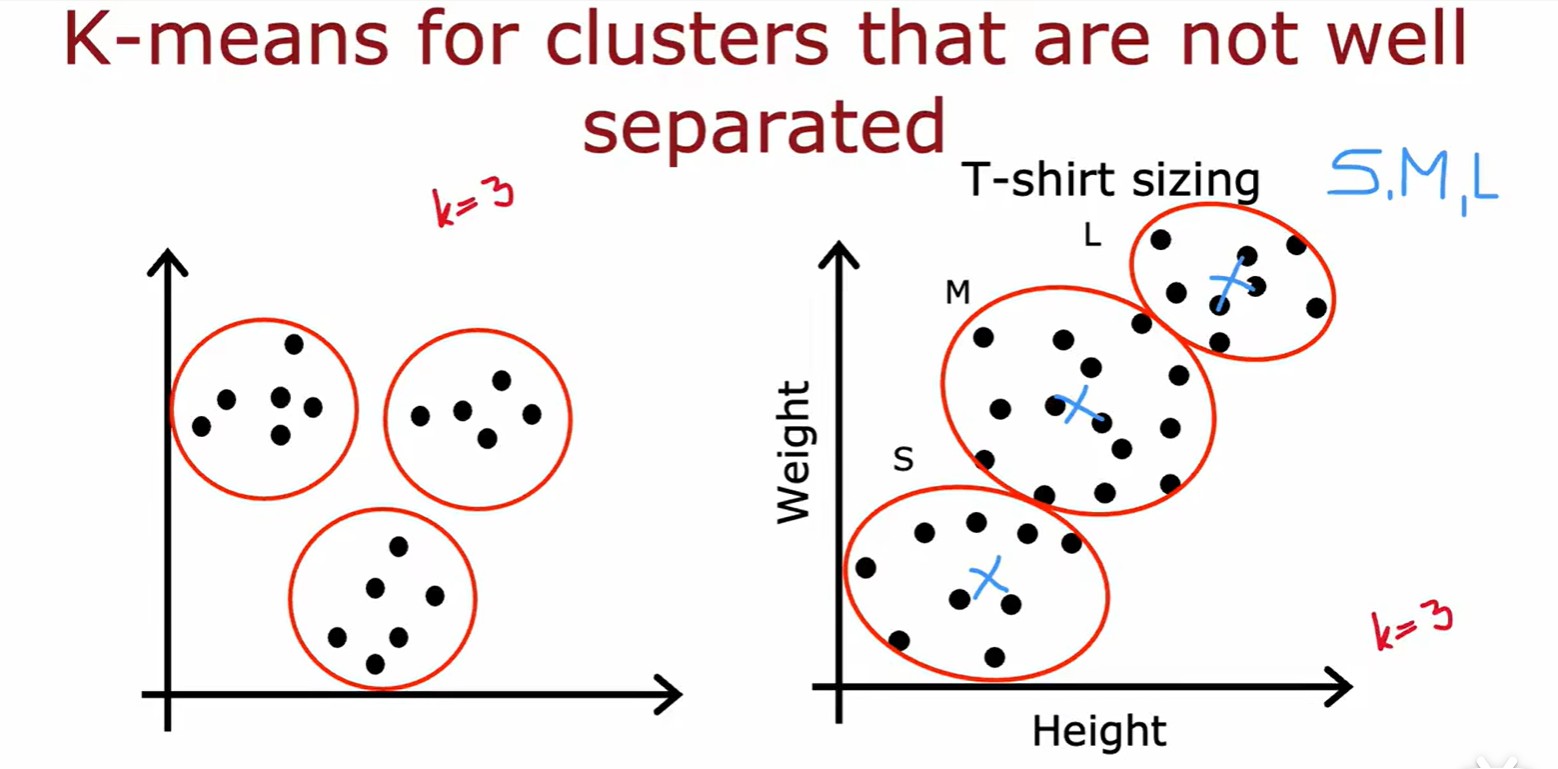
- 对于没有很好分离的样本族群:
Optimization objective
指的每个点,
- 损失 J = 每个数据到其最近质心的距离平方的平均值;
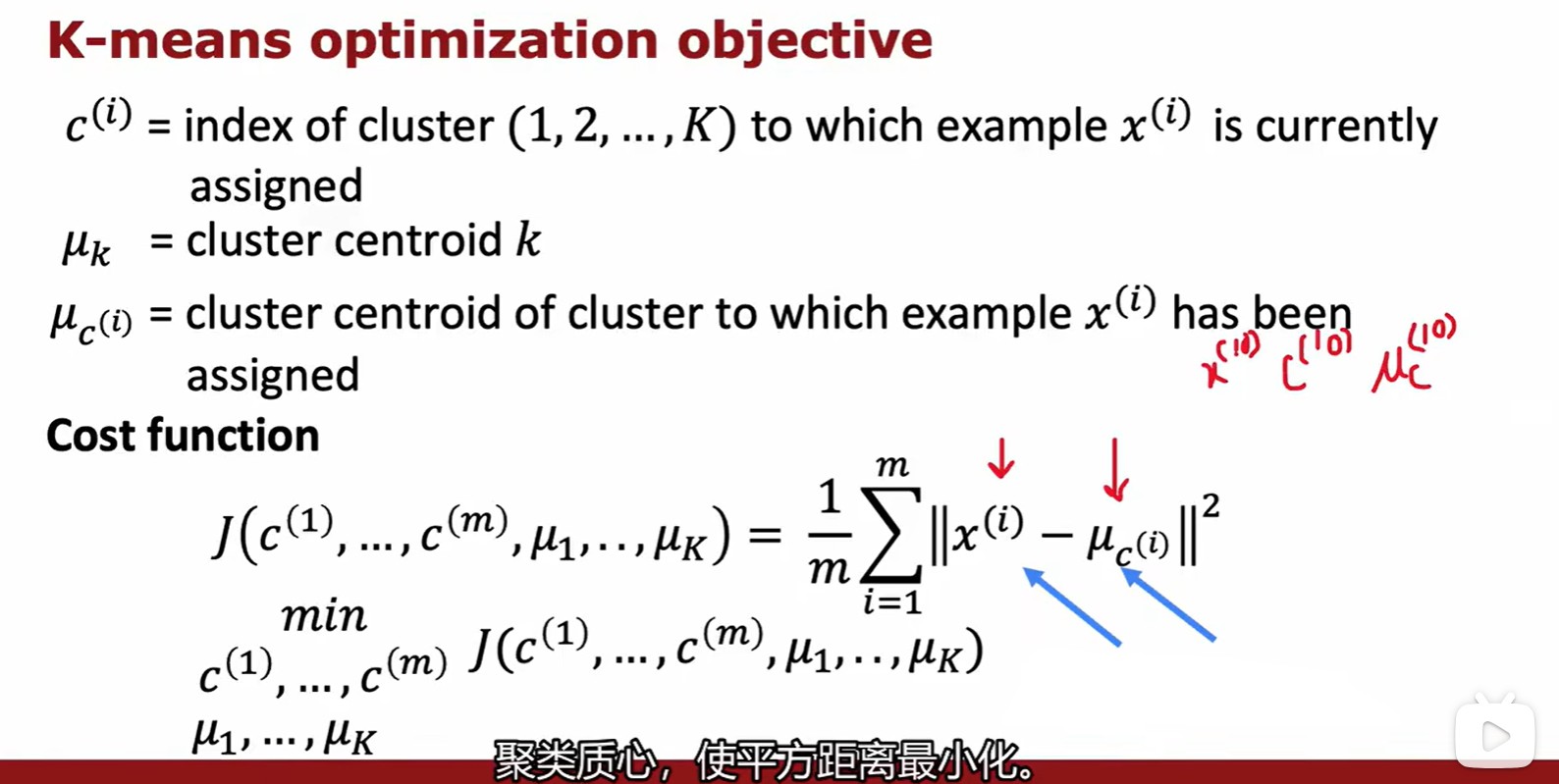
- 这个损失函数还有一个别名:失真函数(distortion funtion);
Initializing K-means
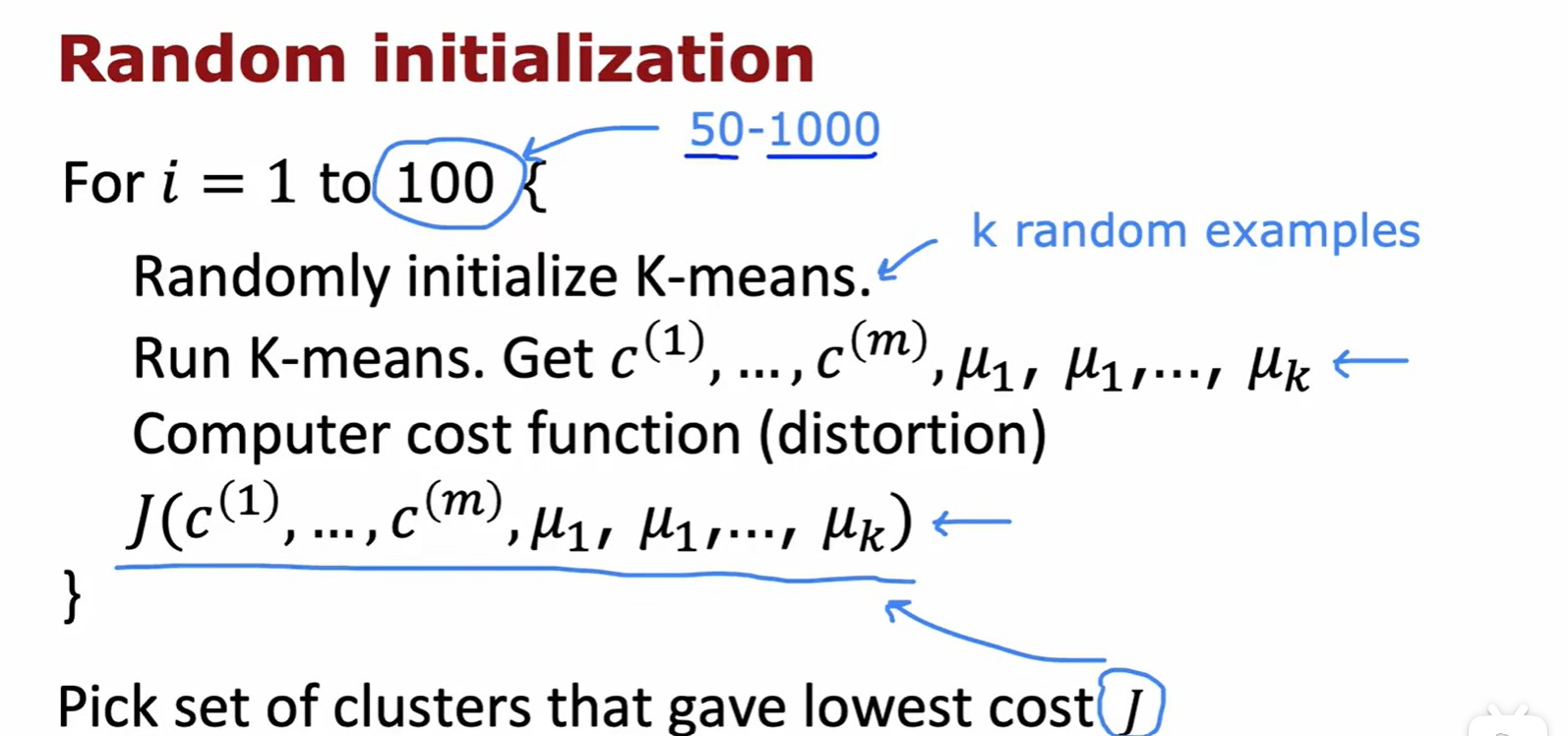
- 更常见的初始化质心位置的方法:将质心分配到几个训练数据的位置上;
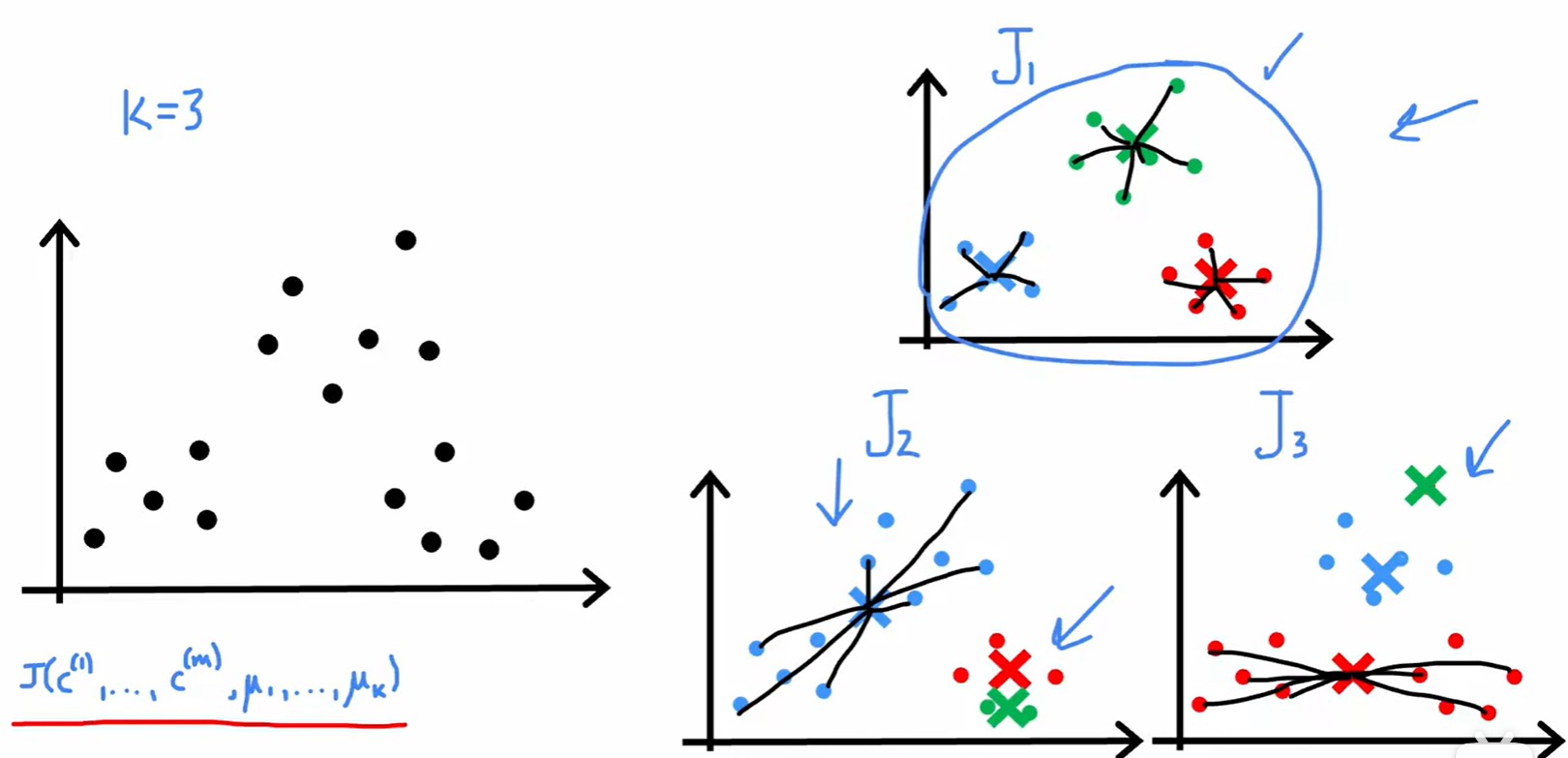
- 在经过多次的随机初始化后,选取 J 最低的初始化方式;
Choosing the value of K
- 如何选择聚类的数量 K,需要平衡 K 与 J 的关系,但是一般不会为了降低 J 而增加 K;
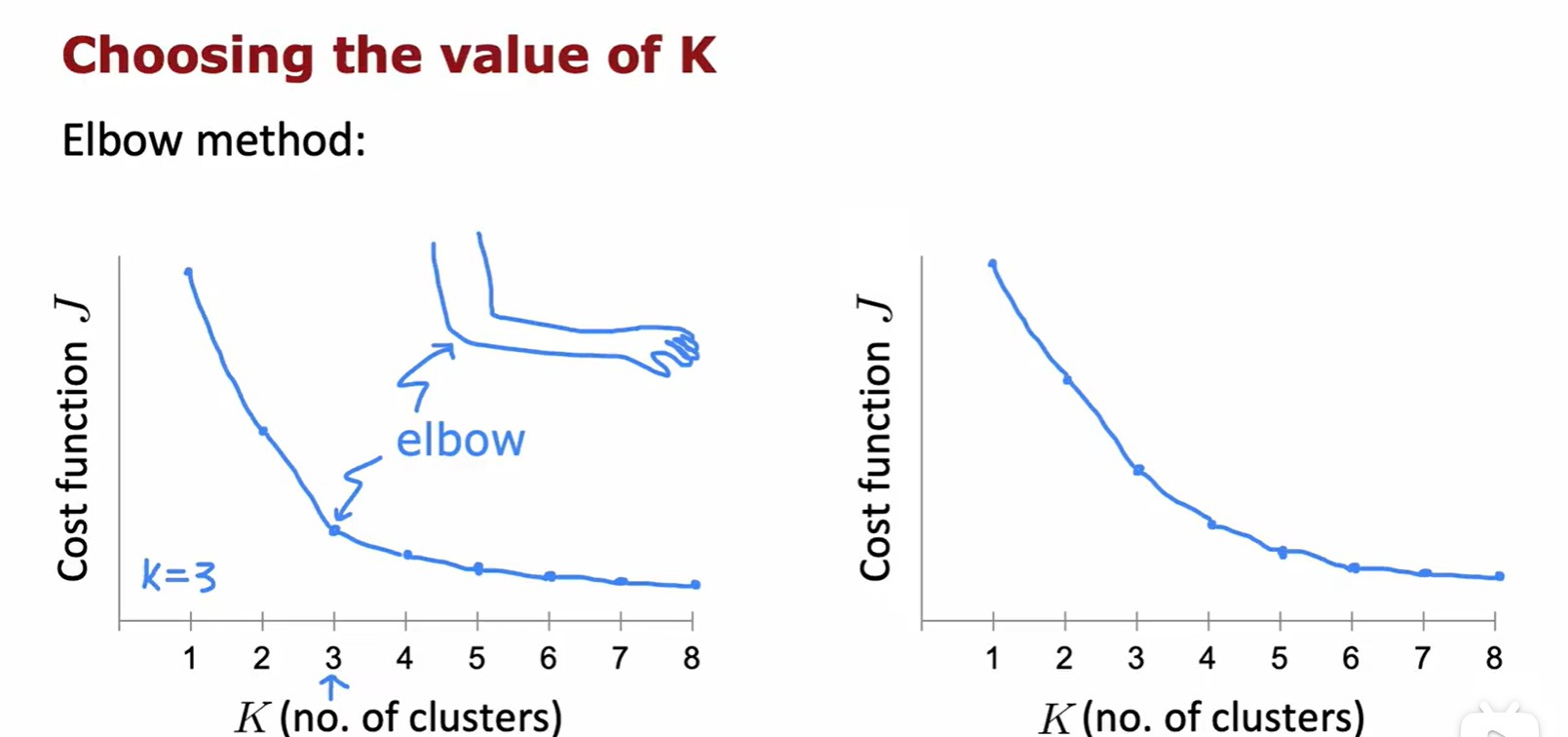
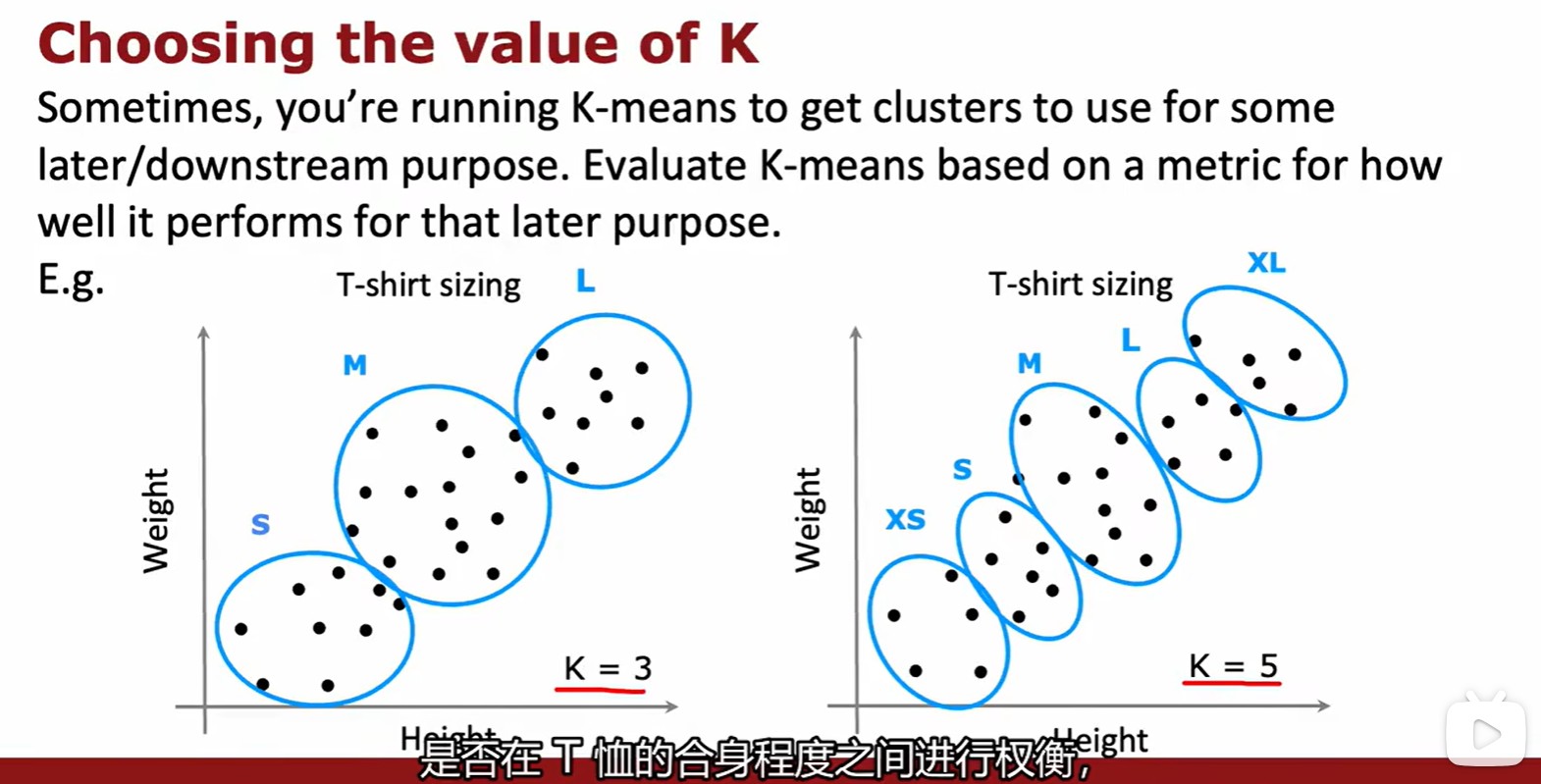
- 最合适的选择还是和实际情况相结合:
1.2 Anomaly Detection
Example and Solution
- 这里记录的数据为飞机引擎温度与振动强度,越接近密集区的数据越正常,越偏离越异常;
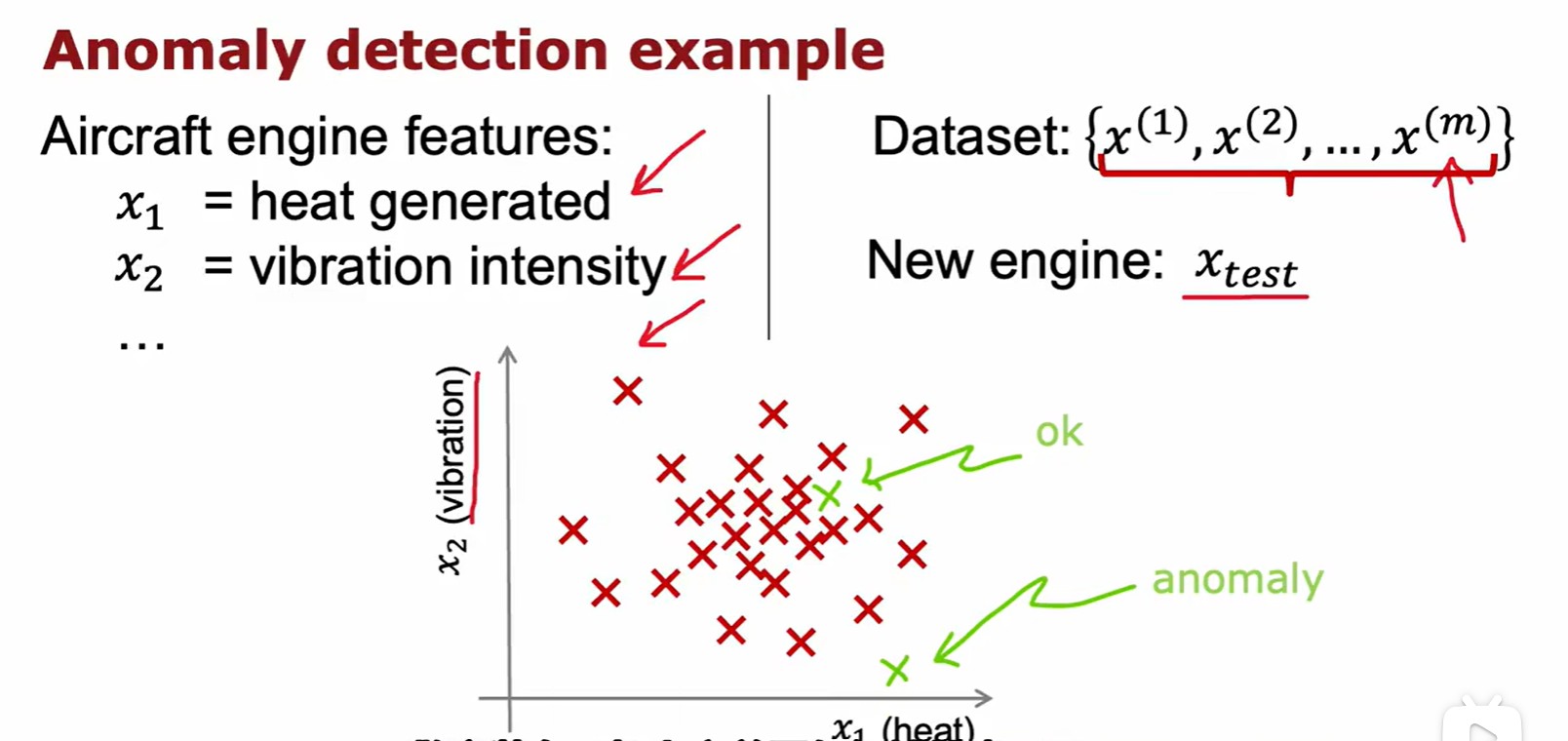
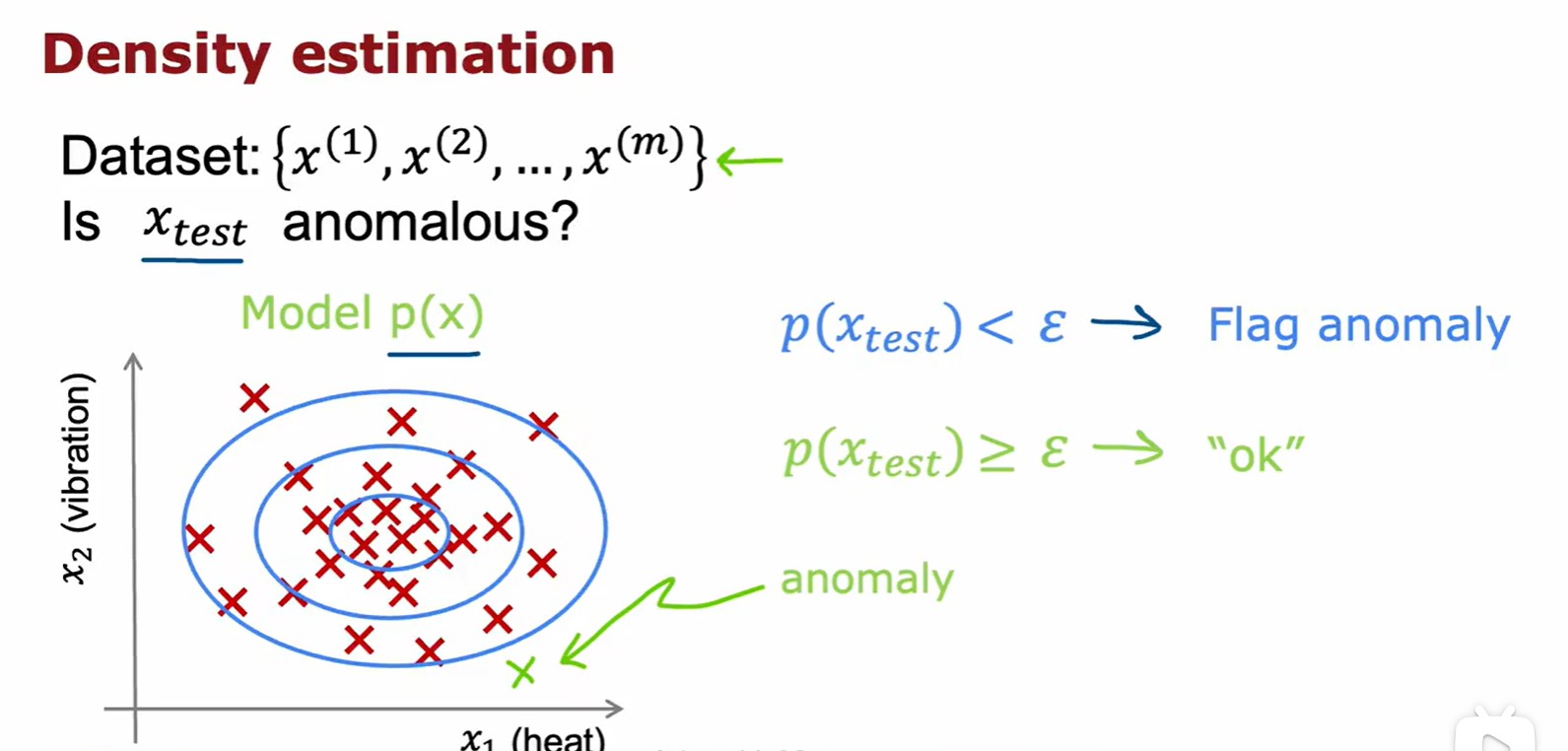
- 一种最常见的方法是密度估计:
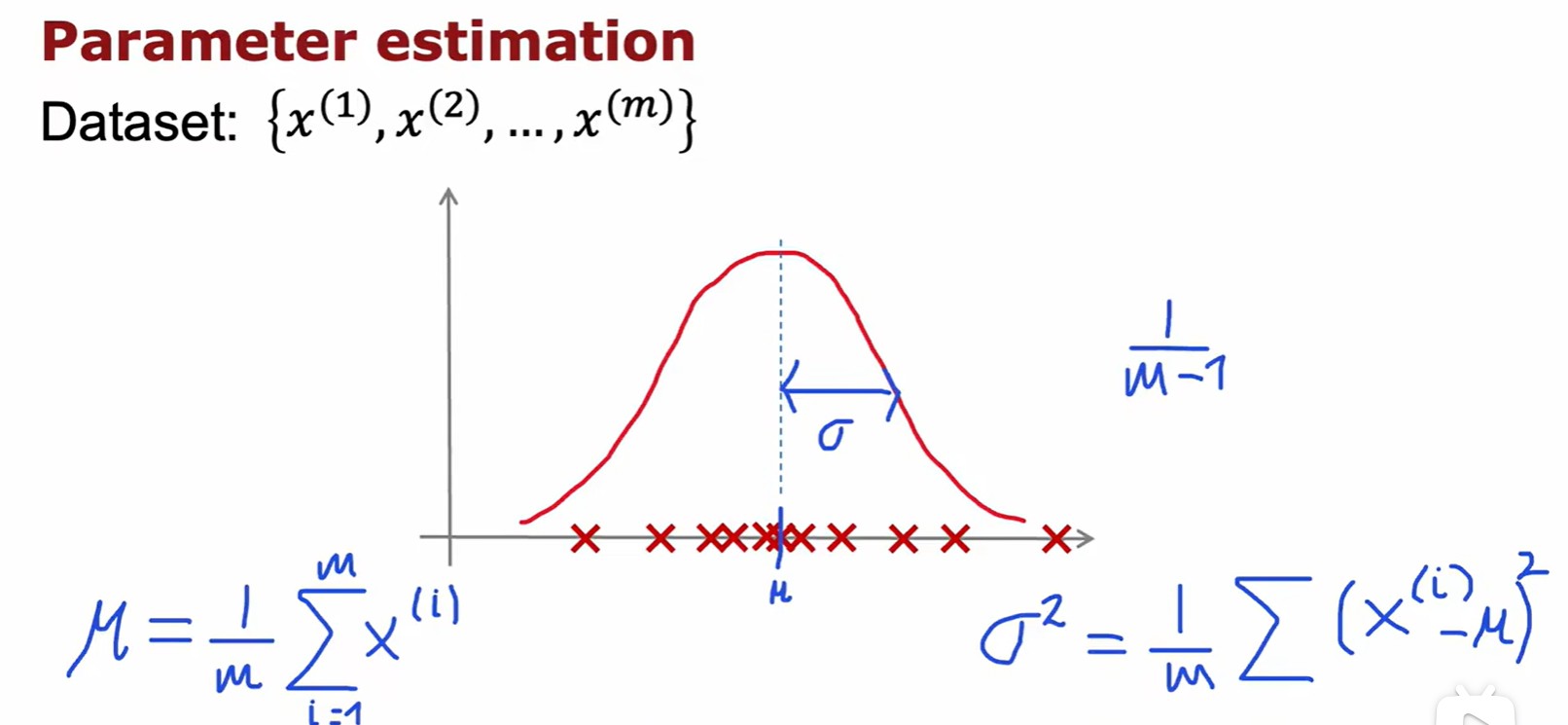
Gaussion/Normal Distribution
- 正态分布:
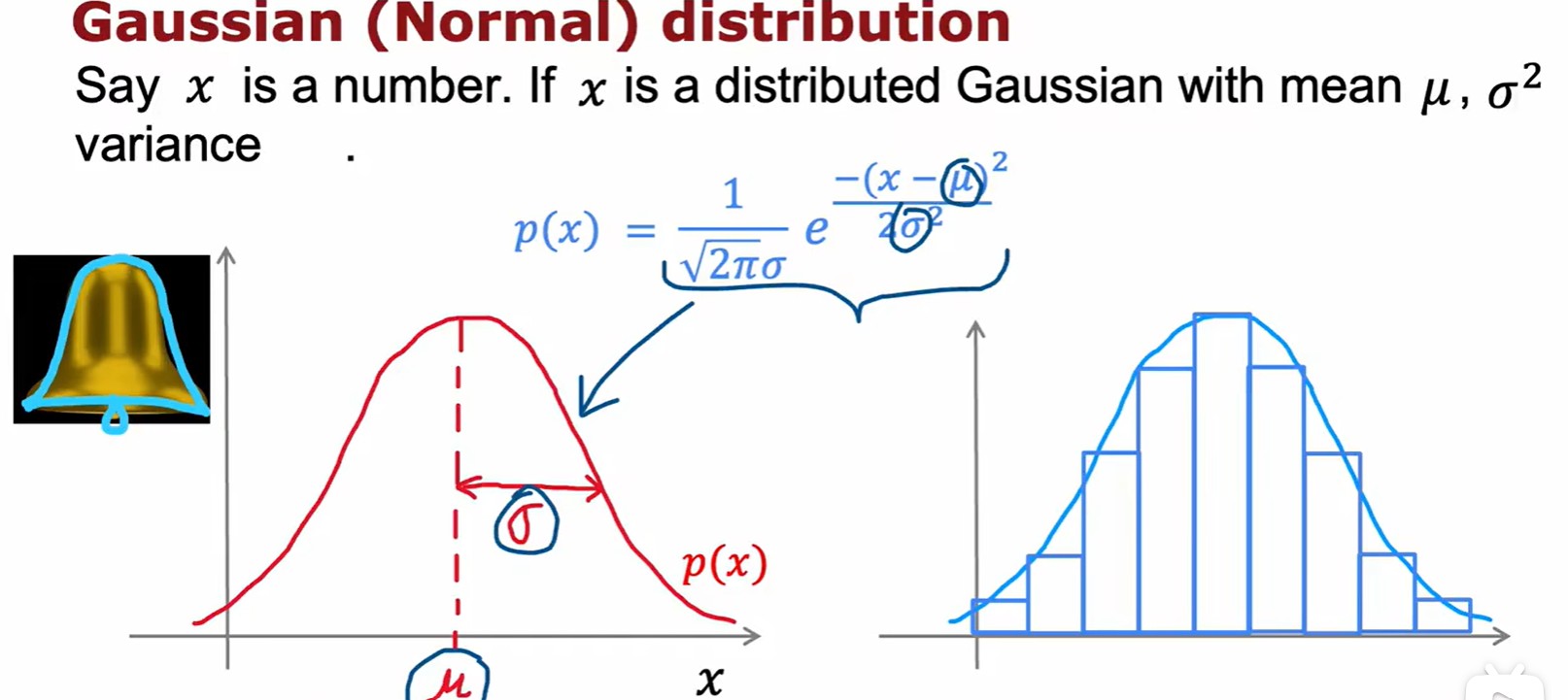
- 越接近中间的数据越正常:
Algorithm
- 概率密度函数不表示概率,但是概率密度函数的值可以表示取这个值附近的点的概率;
- 计算每个特征的概率密度,然后累乘,最后比较;
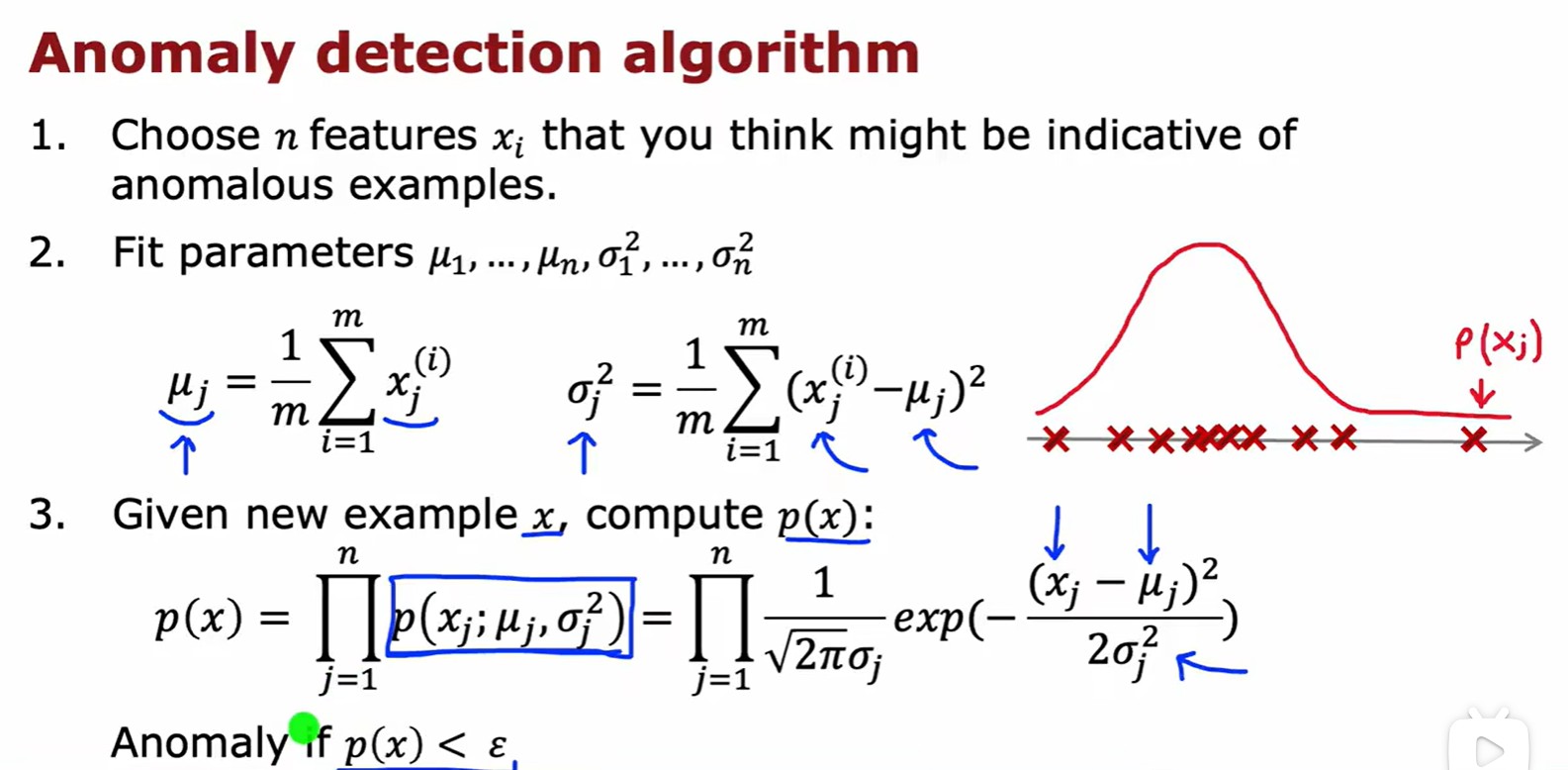
- 二维的正态分布如果是独立的,那么联合概率分布就等于两个相乘;
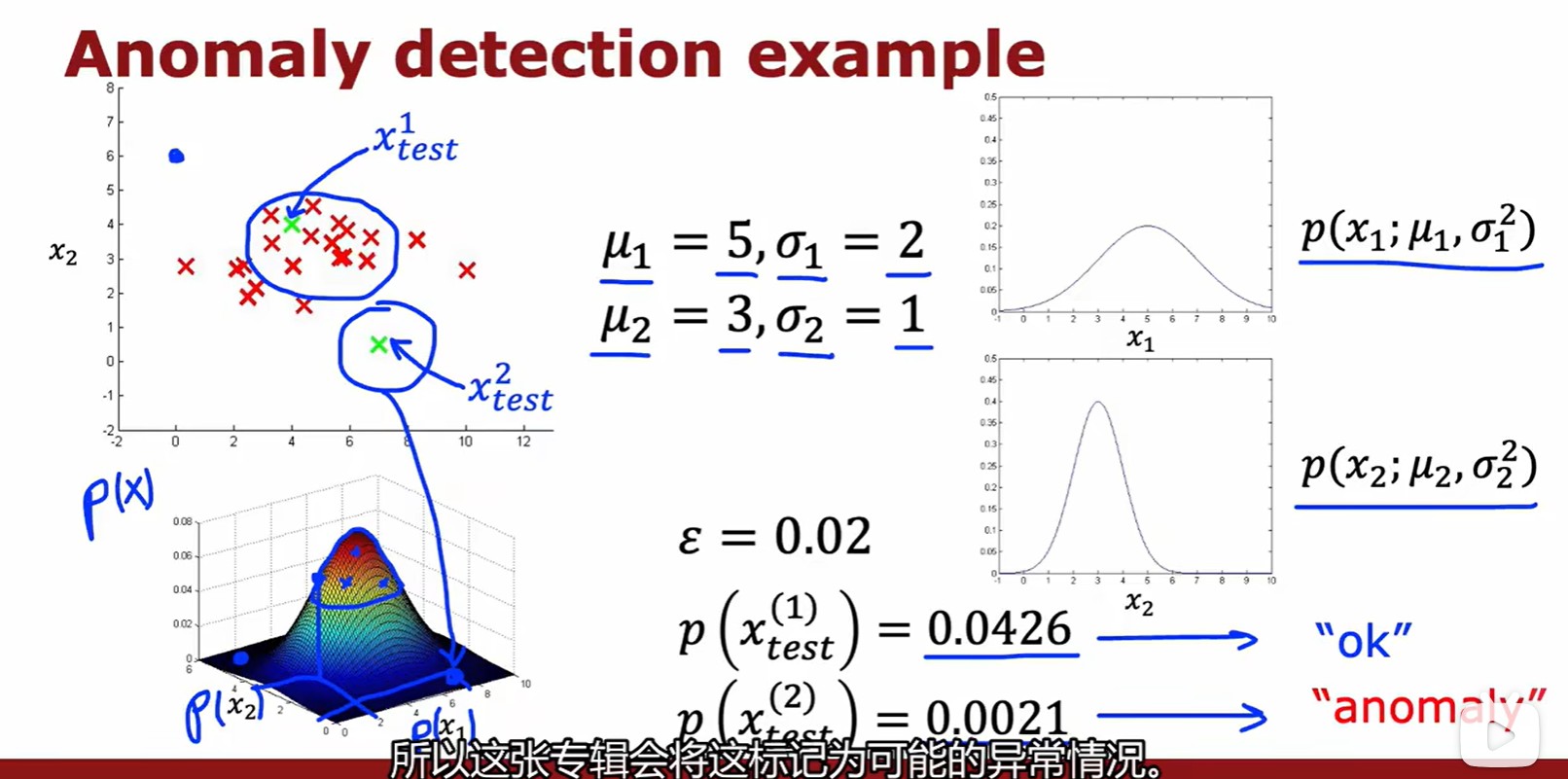
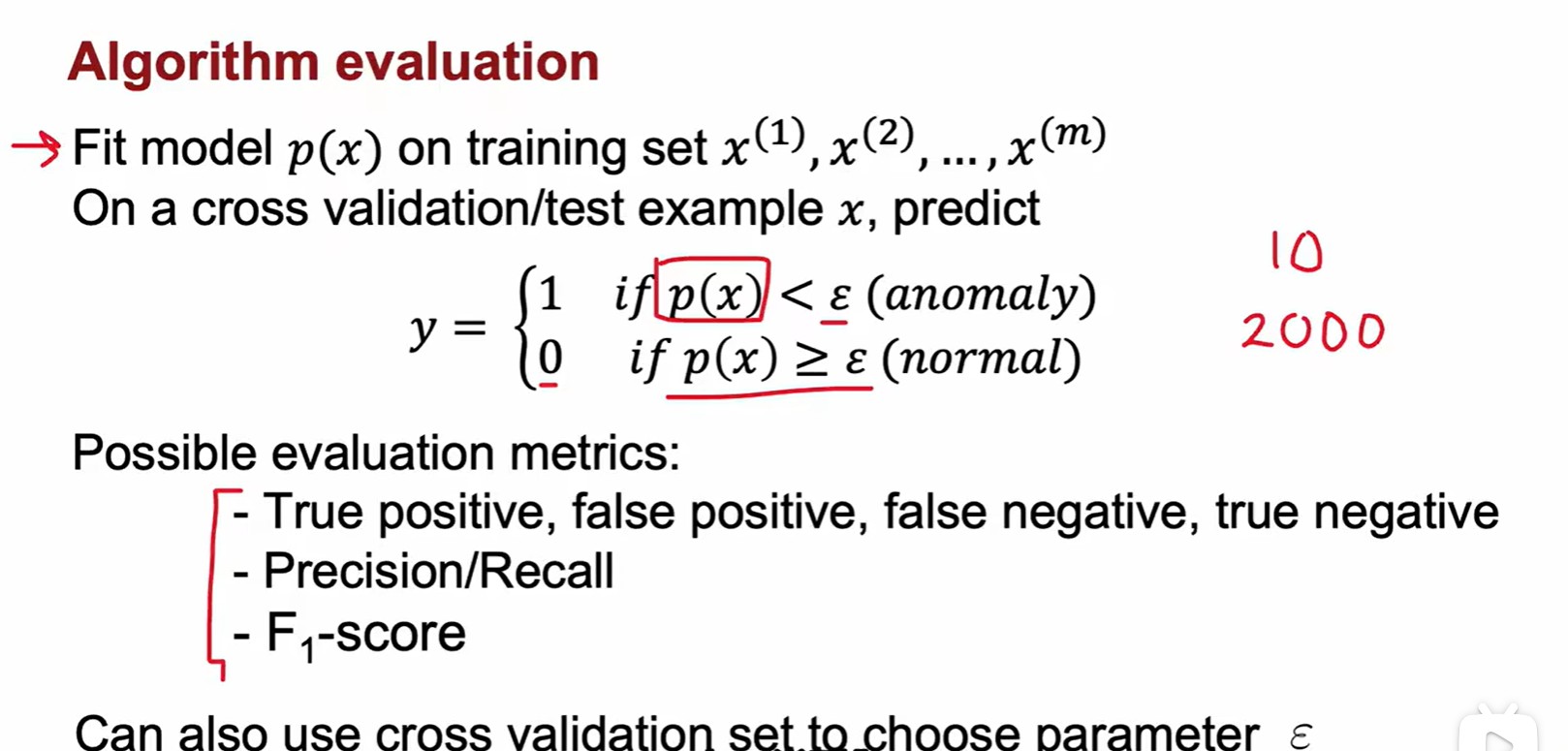
- 将计算出的概率密度与预先设定好的
Evaluating system
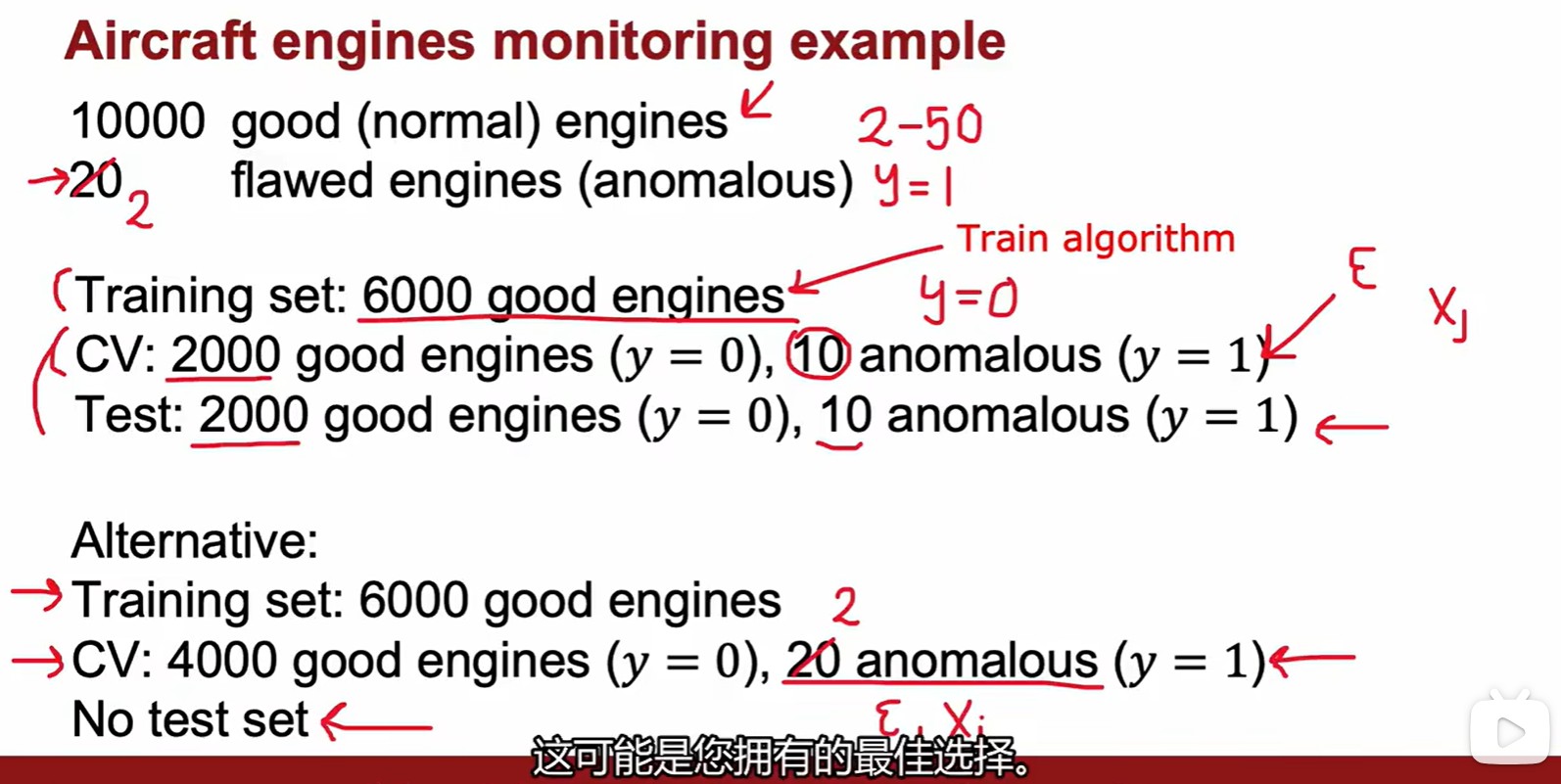
- 评估系统:设立交叉验证集和测试集,或者只保留交叉验证集,训练集不包含异常数据;
- 相当于用无标注的训练集训练出一个特定均值和方差的正态分布,并默认两端的极值是不正常的。再通过测试集来调整阈值,使得阈值之上的都是正常的,阈值之外的都是不正常的。
- 利用交叉验证集和倾斜数据集里的F1 score计算出最合适的
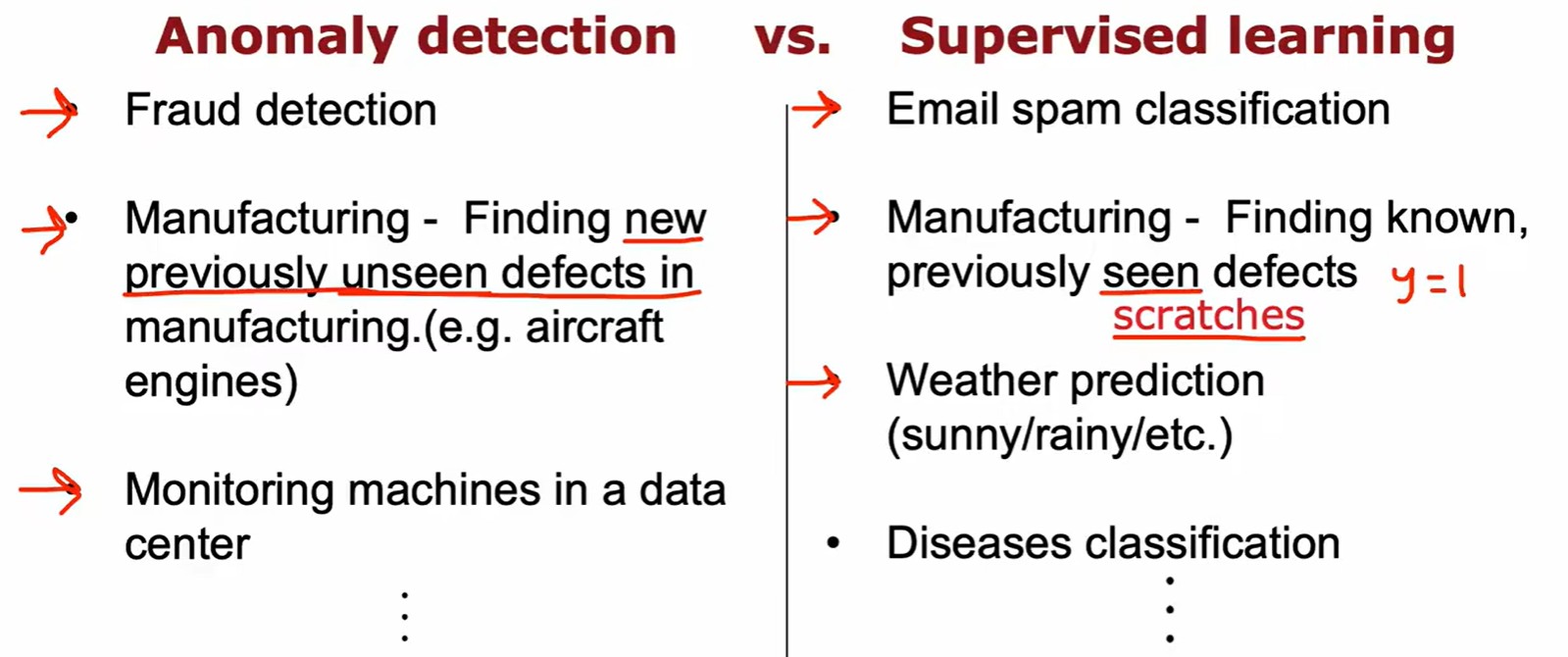
Compared with supervised learning
- 异常检测面对未知异常情况,监督学习面对已知异常的所有可能;
- 本质区别:一个反向排除,一个正向学习;
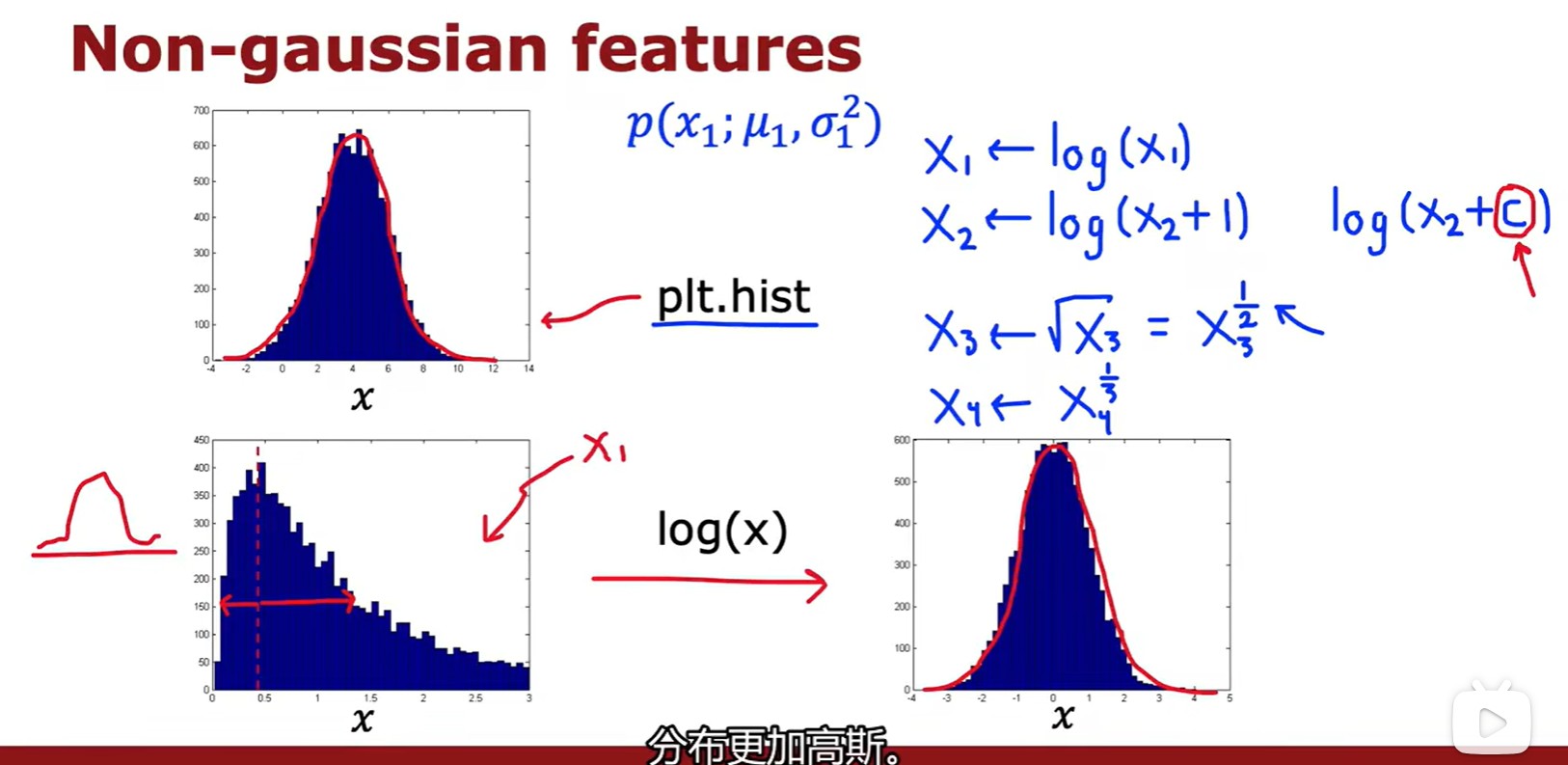
Choosing featrues
- 选择更接近高斯分布的特征集,或者将其转化为类似高斯分布的特征集;
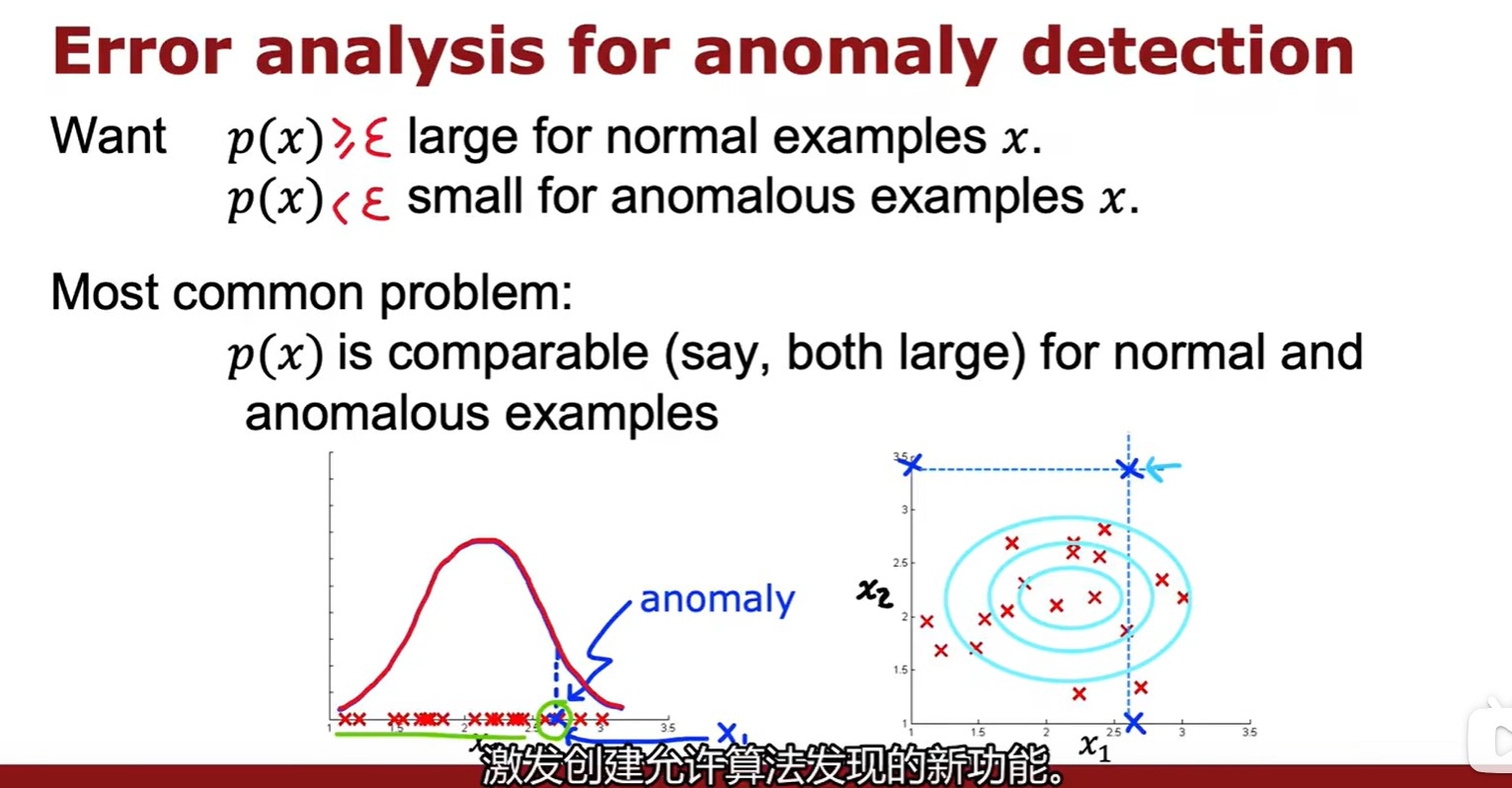
- 如果已有特征无法分辨该数据是否异常(计算得出是异常,但与其他示例又十分接近),则试图找出是什么让我认为是一个异常,由此识别出新特征;
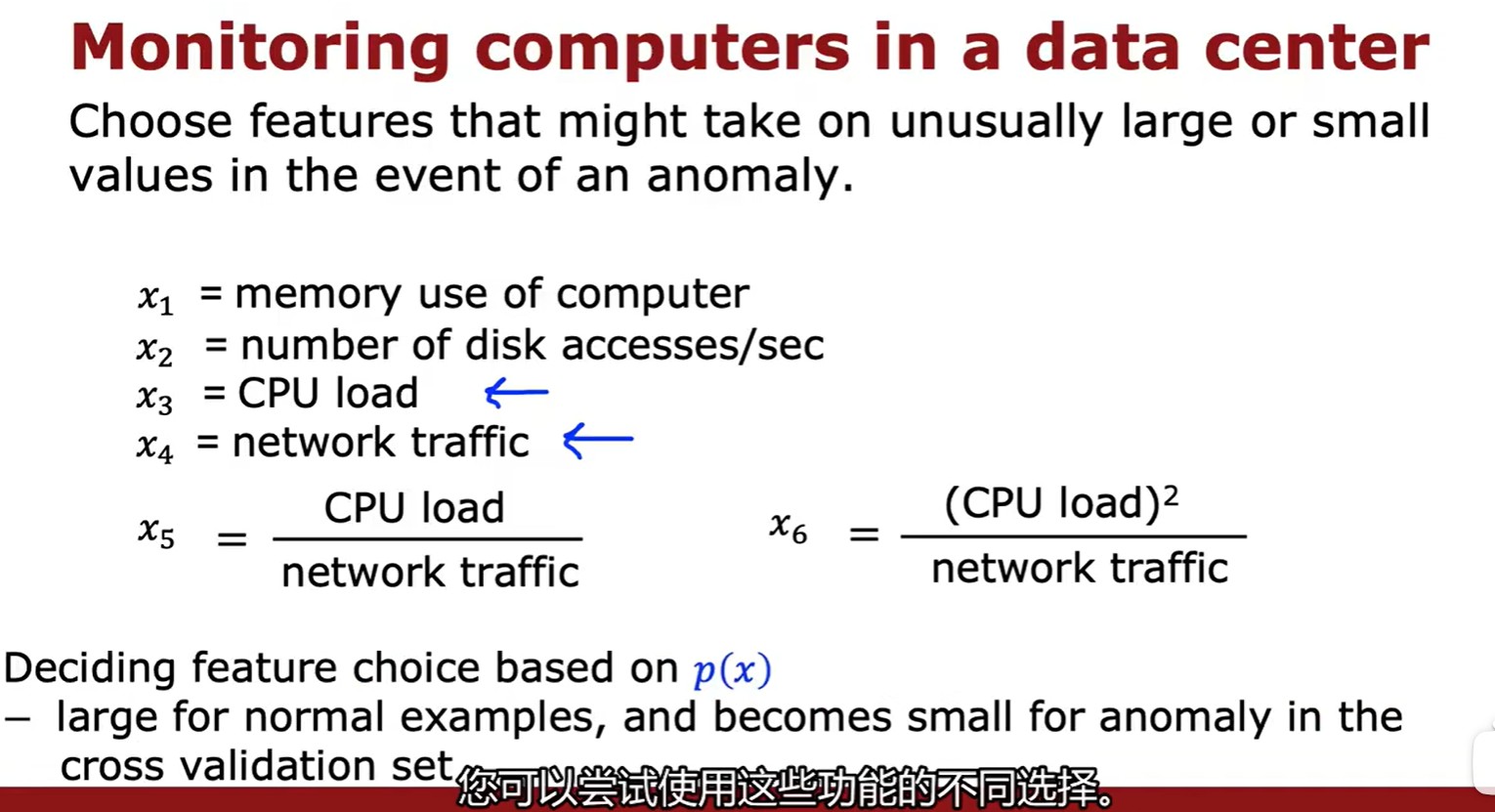
- 组合原有特征合成新的特征:
Week 2
2.1 Recommender System
Making recommendations
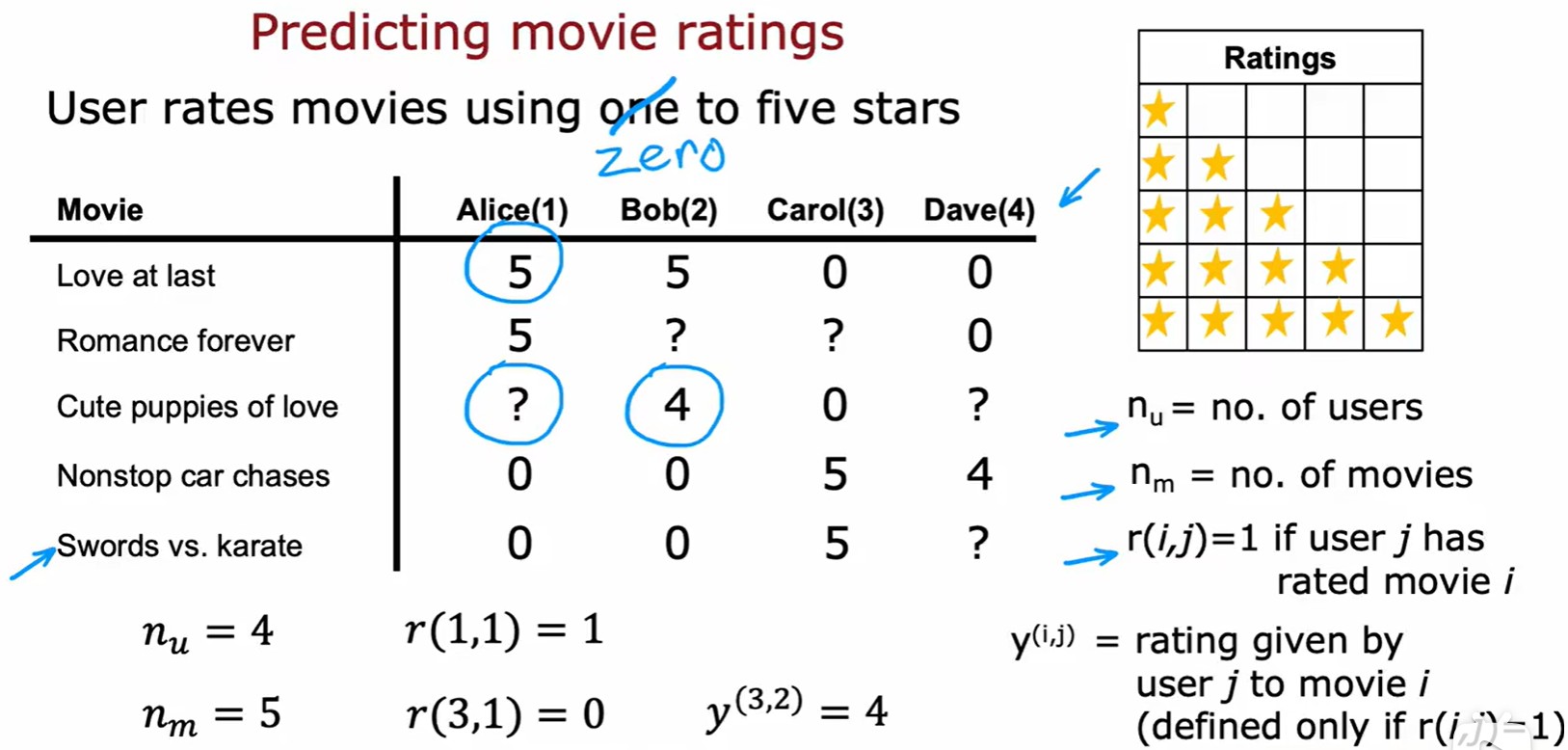
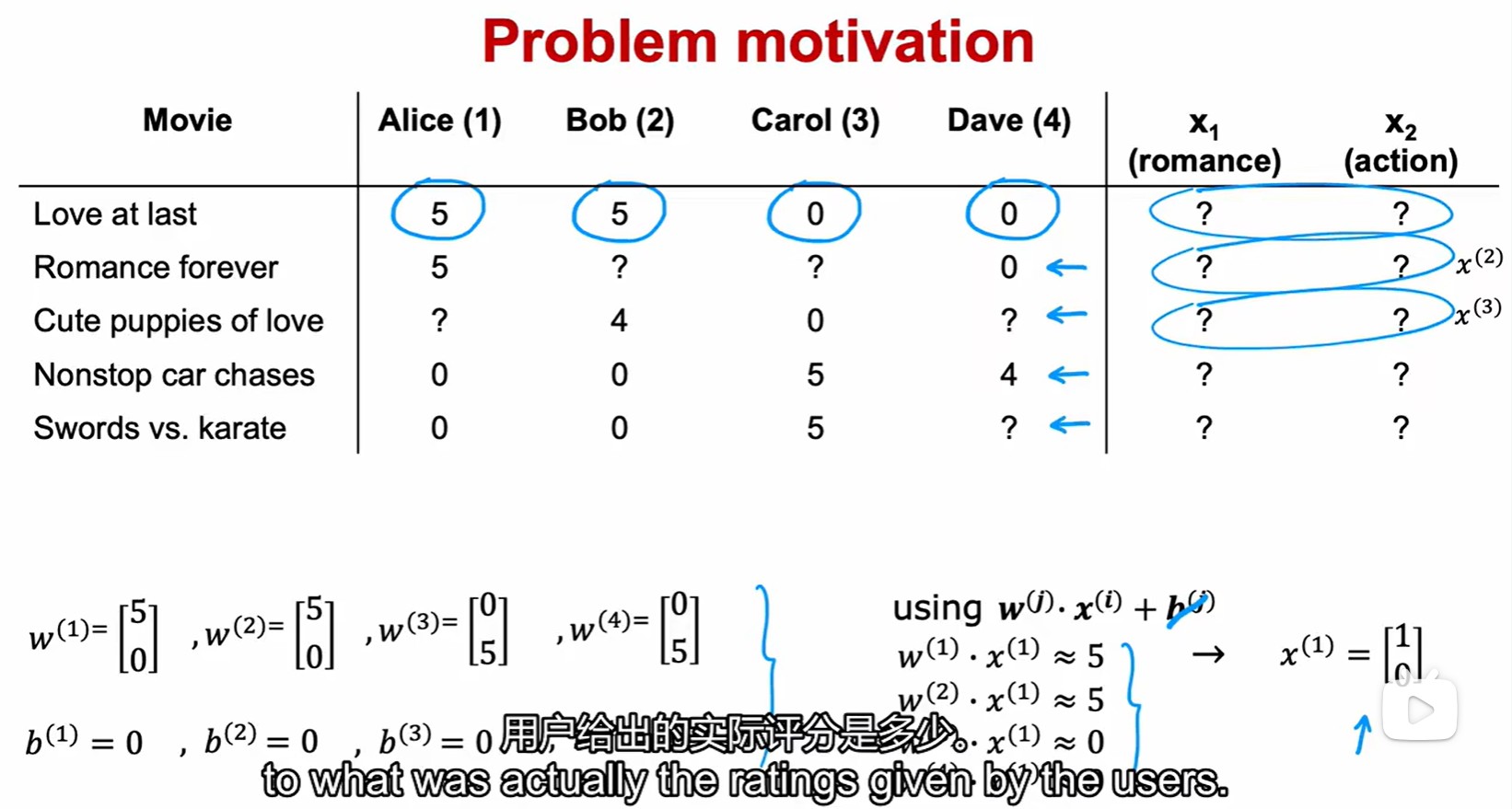
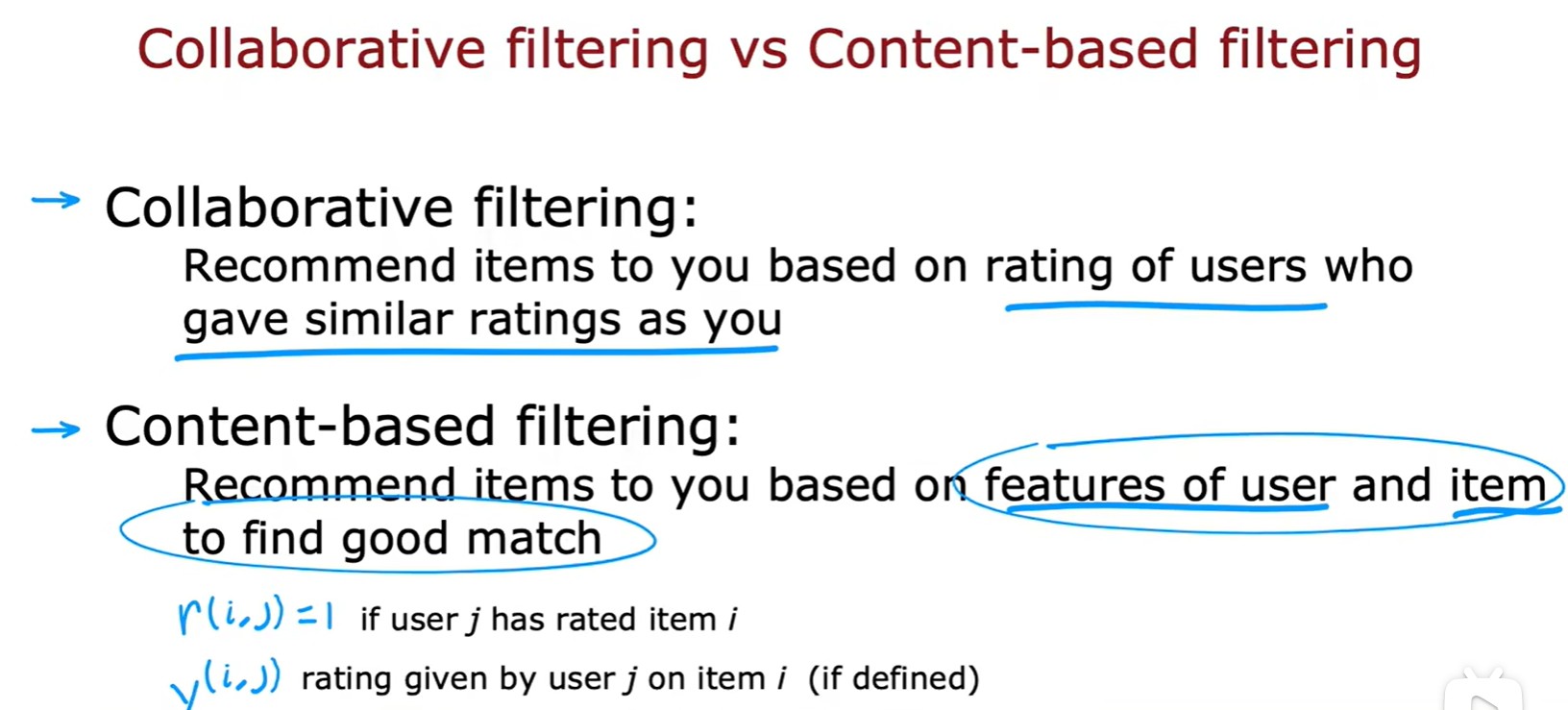
- 电影评分:r(i, j) 表示用户 j 是否对电影 i 进行评分,y(i, j) 表示用户 j 对电影 i 的评分;
Using featrues
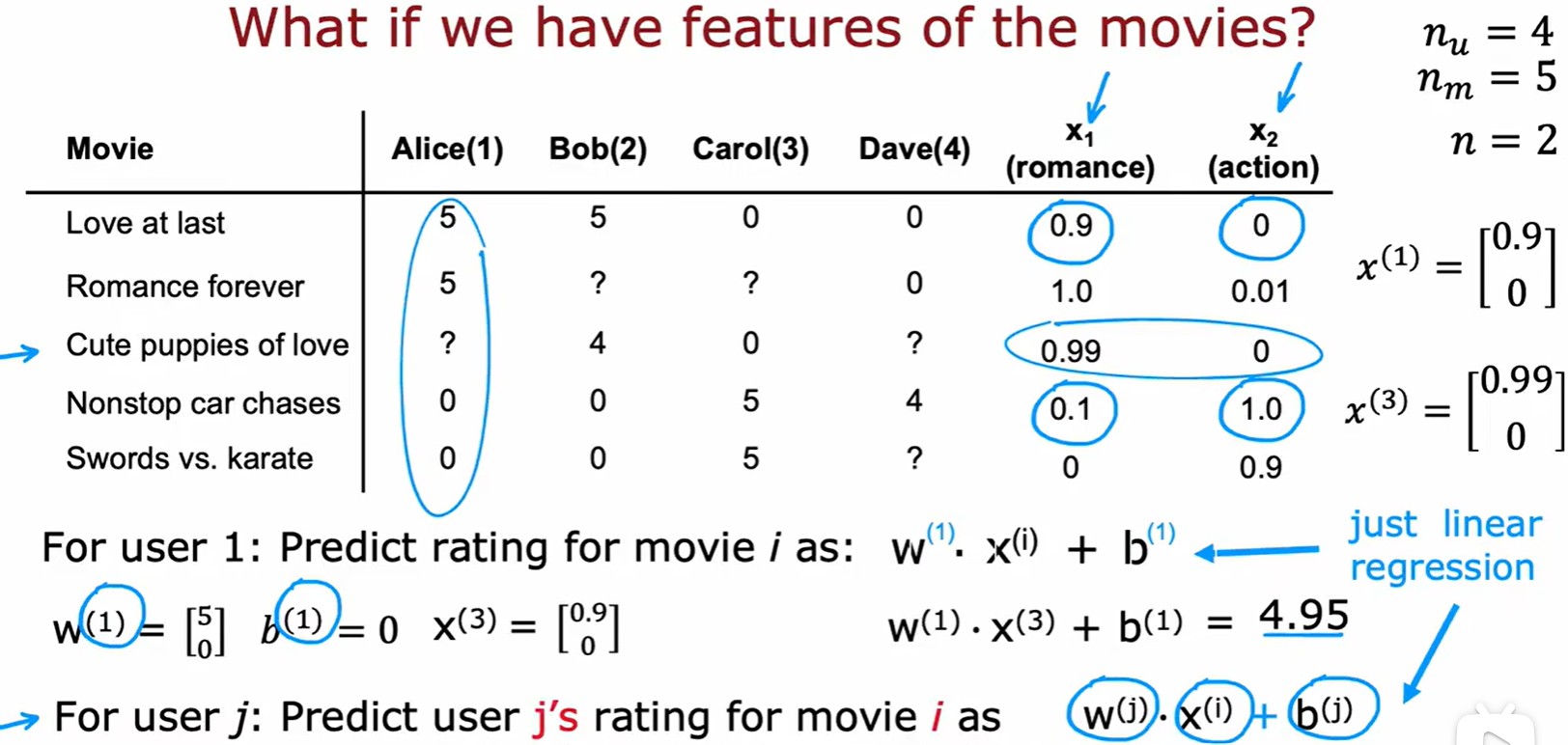
- n 为特征数,这里为每个用户构建一个线性模型:
- 计算损失:
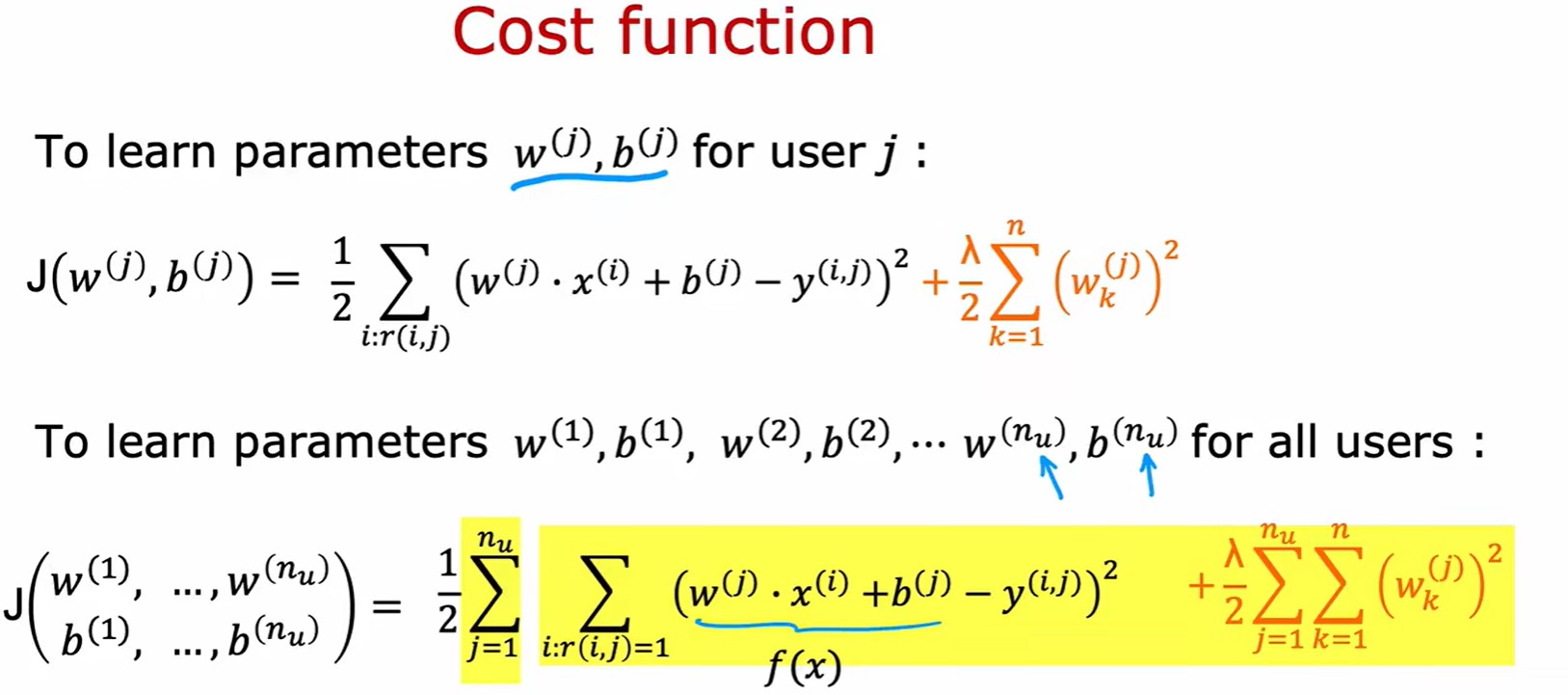
Collaborative filtering algorithm
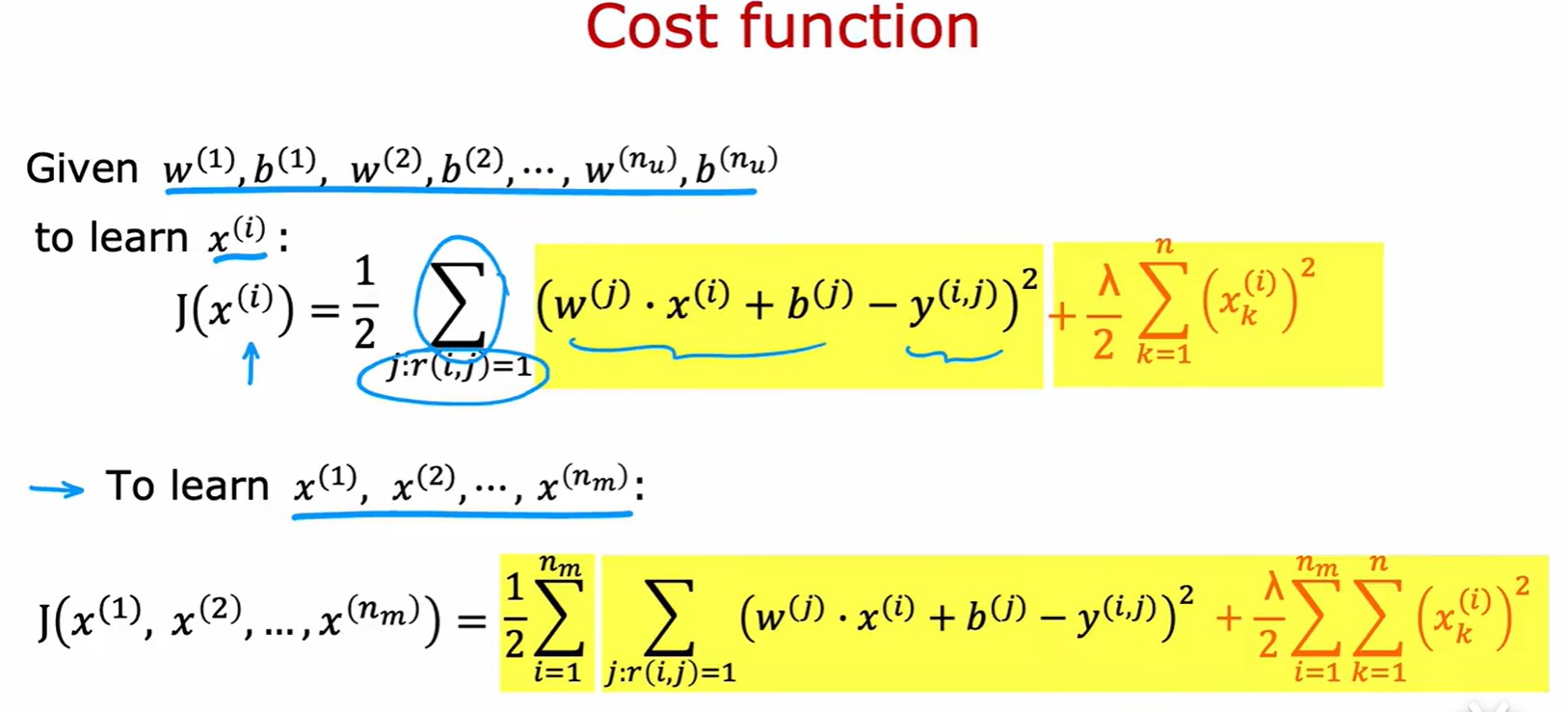
- 协同过滤算法:特征向量未知,但是参数 w, b 已知;
- 也就是说我们可以通过用户对电影的评分然后计算出参数 w 和 b。然后计算出 w 和 b 后,就可以通过数据来预测对未知电影特征进行评分;
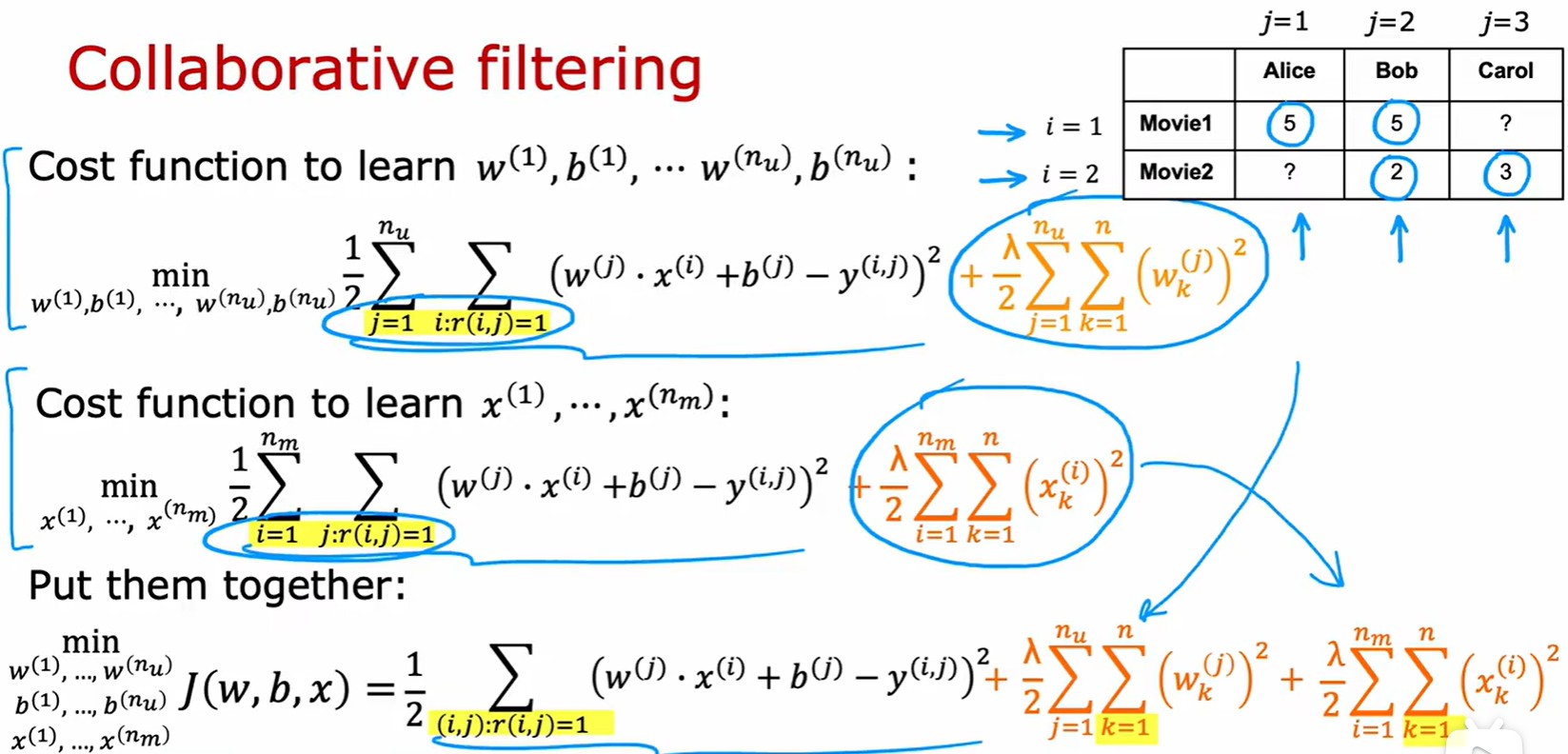
- 计算损失:注意这里的正则化是用 x 而不是 w;
- 结合两个损失公式,得到总体成本函数(类似线性回归,但是包含三个变量):
- 这里的求和项只是变了一种形式而已。第一个表示先对列求和,在对行求和。第二个则表示先对行求和,再对列求和。最后这个再形式上化简了,没有行和列的概念。直接对每个(i,j)对求和;
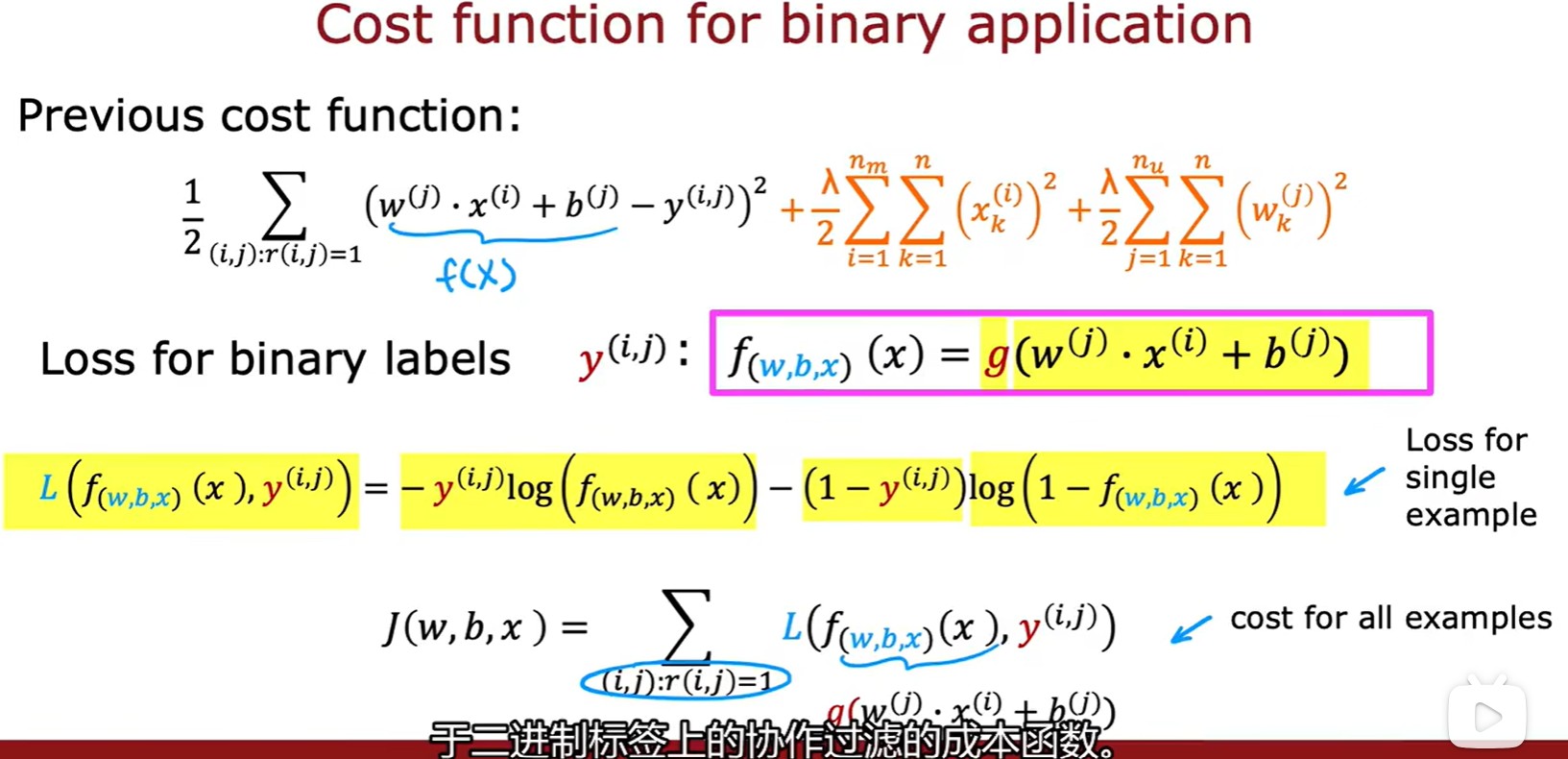
Binary labels
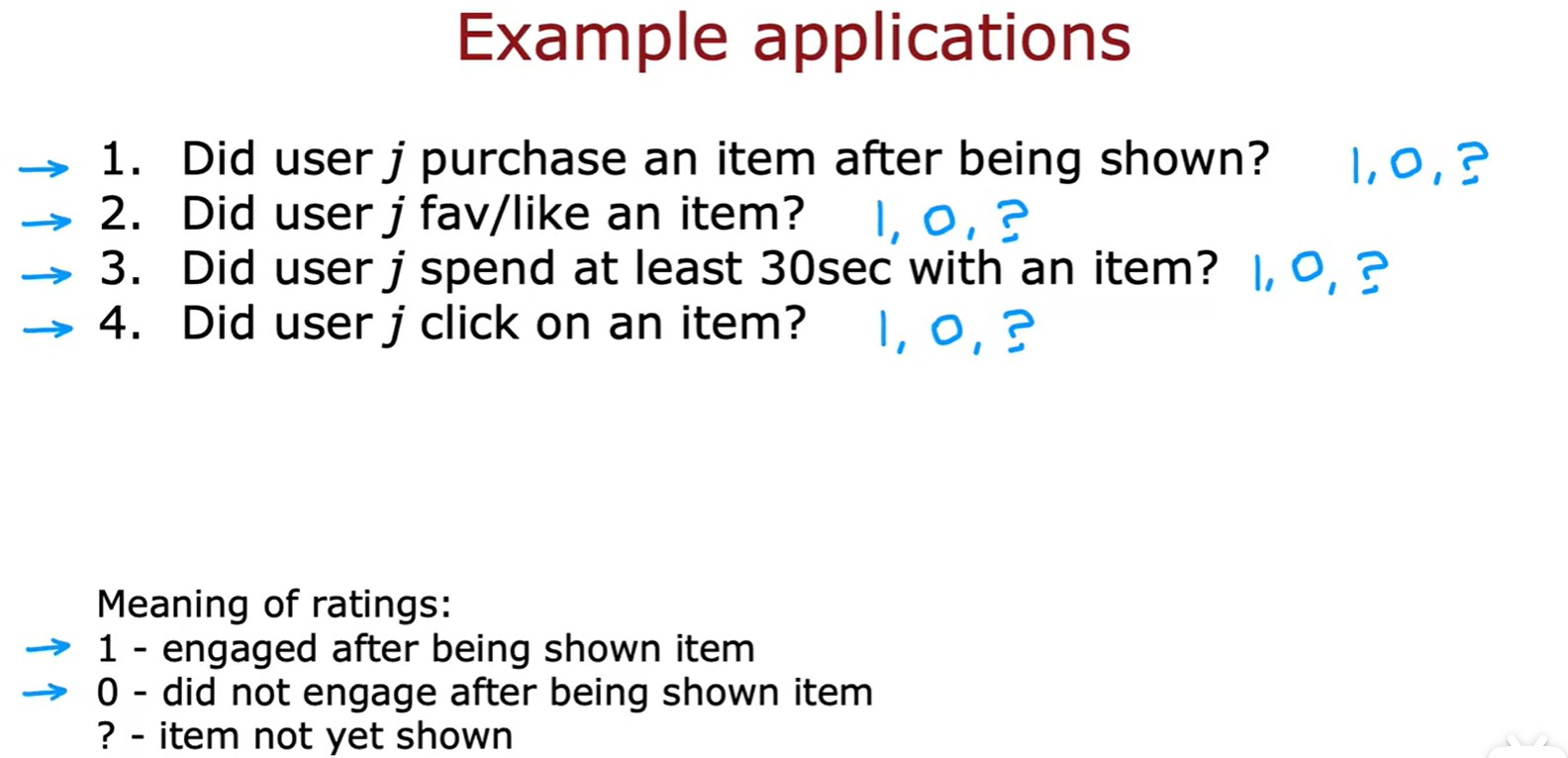
- 二进制标签应用:1代表看到了且参与,0代表看到了但是未参与,?代表没有看到;
- 计算损失(类似 logistic 回归,只是包含三个参数):
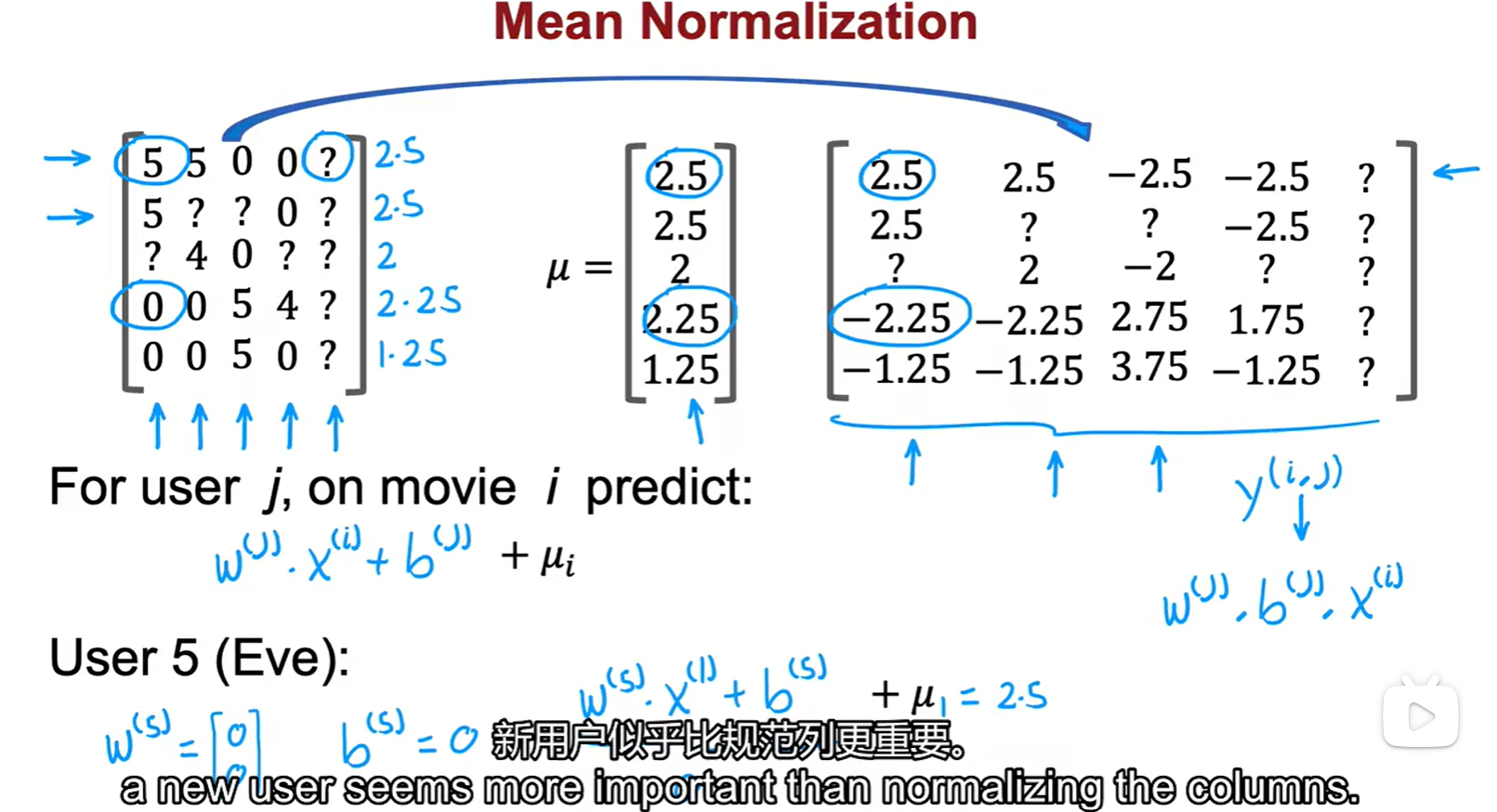
2.2 Mean Normalization
- 均值归一化:一个新用户,没有任何信息,但是我们不能不给TA推东西,所以要靠取均值来进行冷启动;这里做的是行归一化,参数初始化为 0;
- 行归一是对于新用户的预测更加合理,列归一是对于新电影的预测更加合理;
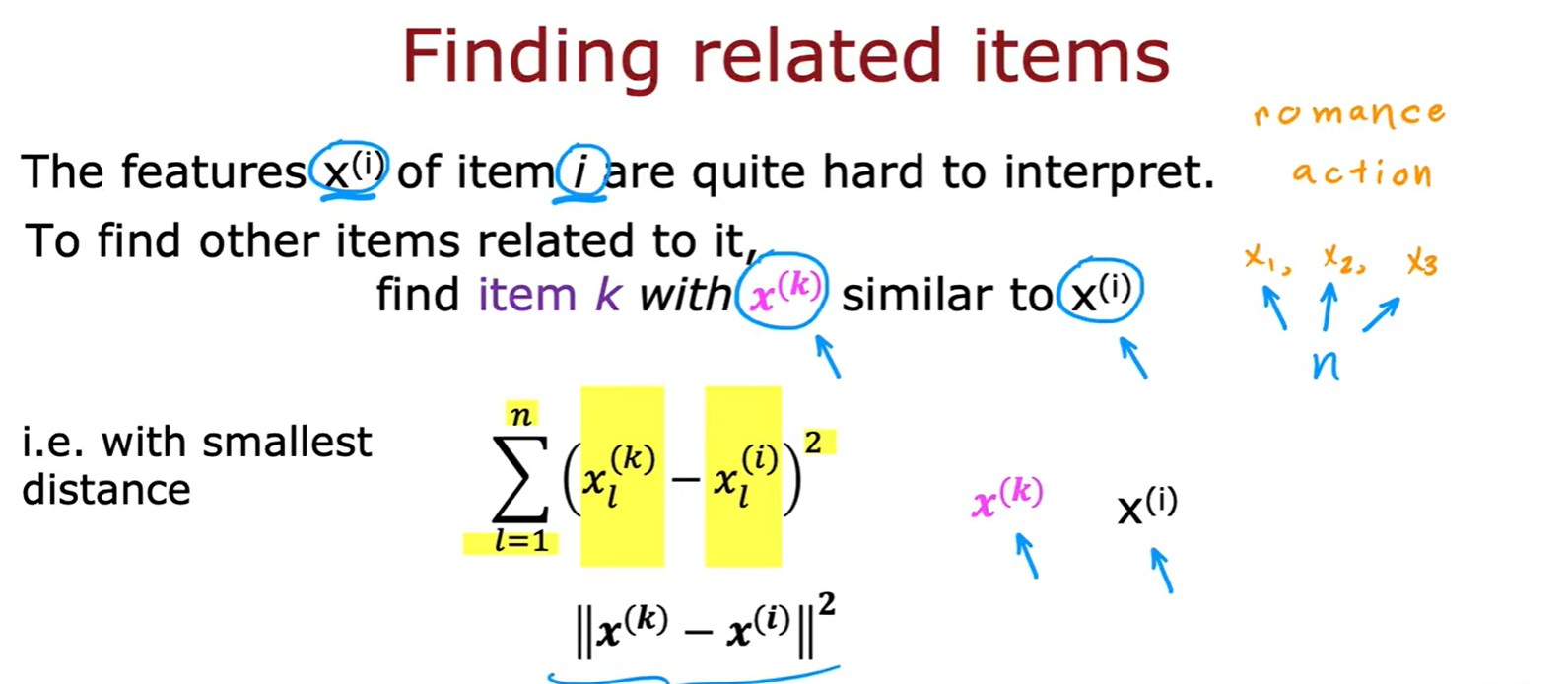
2.3 Finding related terms
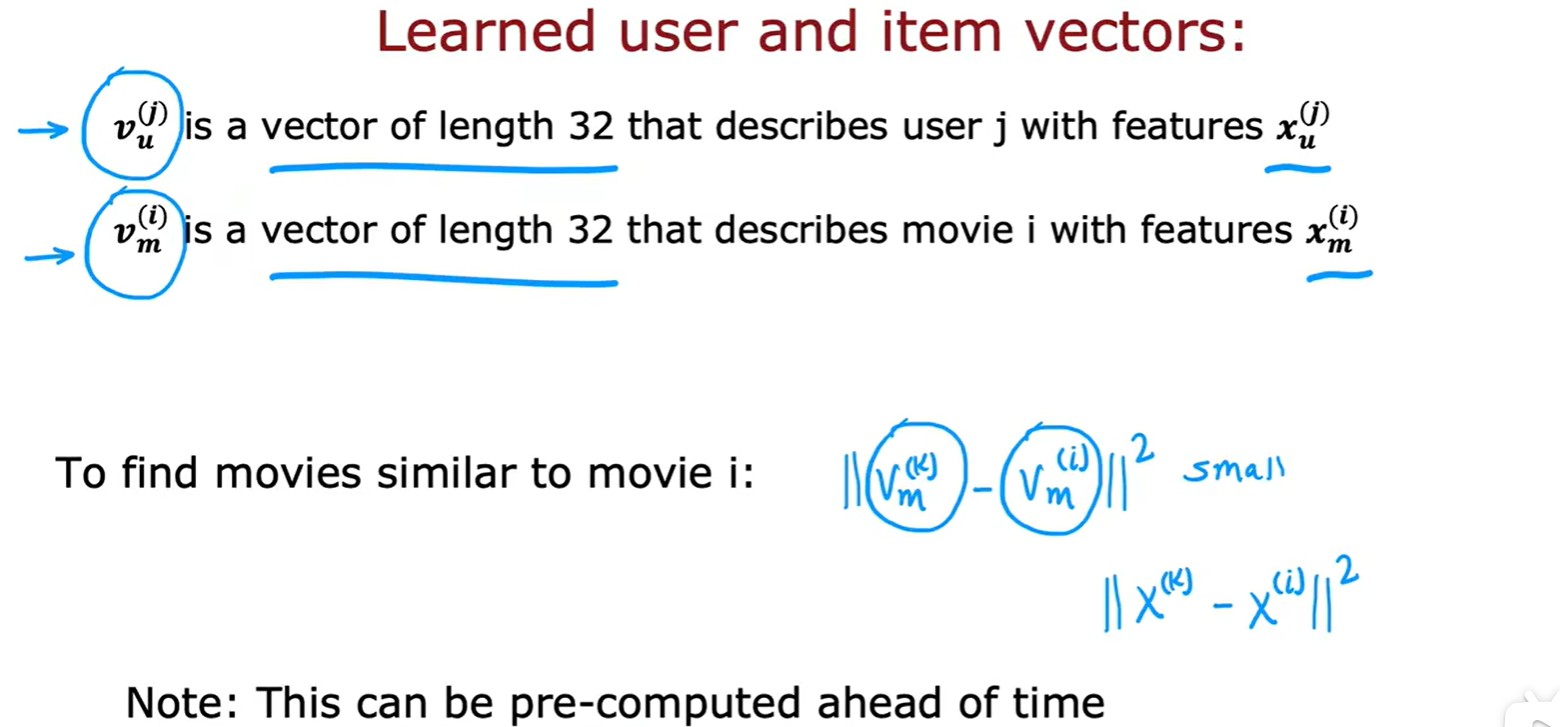
- 通过计算两个特征向量间的差平方和,从而判断两者是否相似:
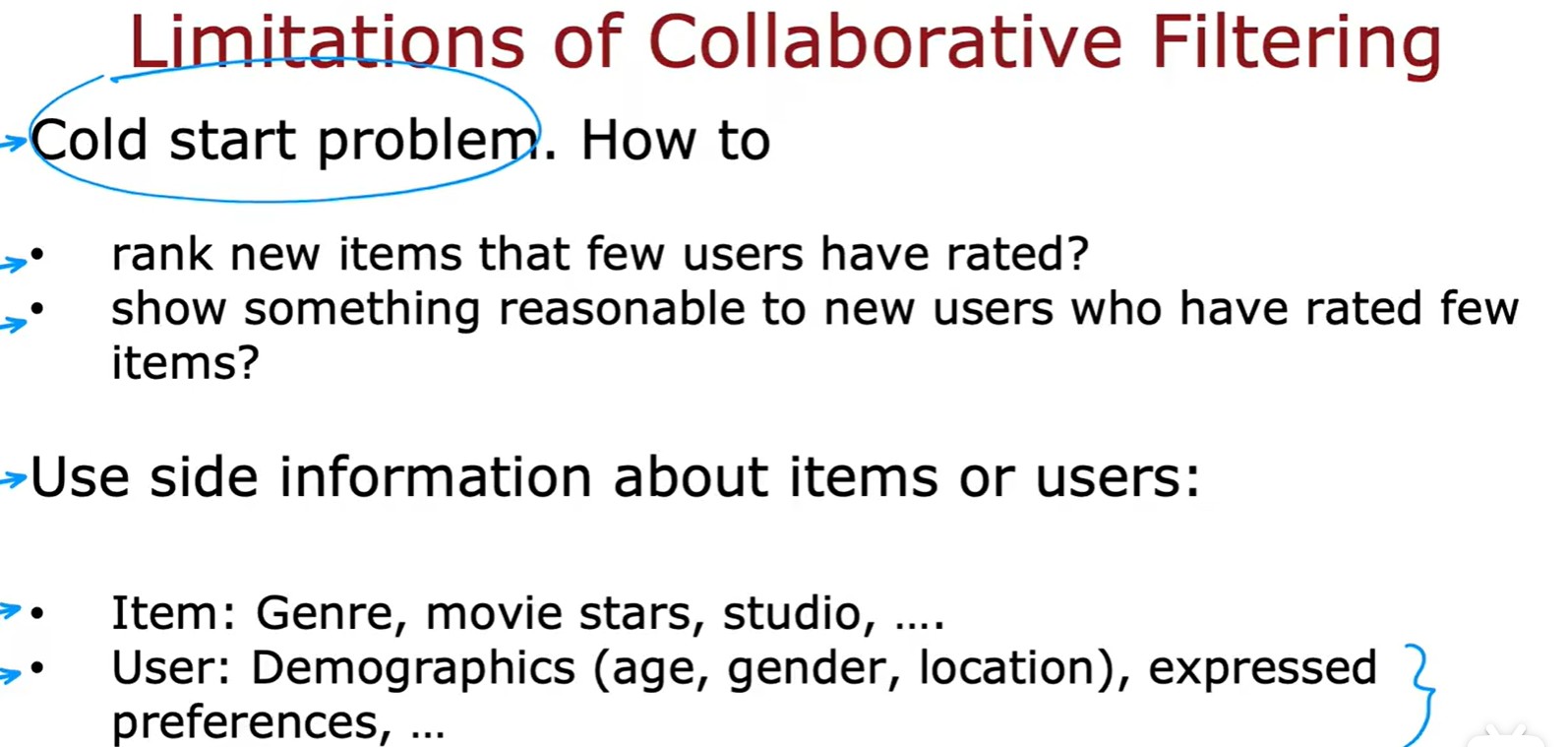
Cold start
- 协同过滤的限制:1.冷启动问题(初始数据不足)2.难以利用其他信息;
2.4 Content-based filtering
Compared with Collborative filtering
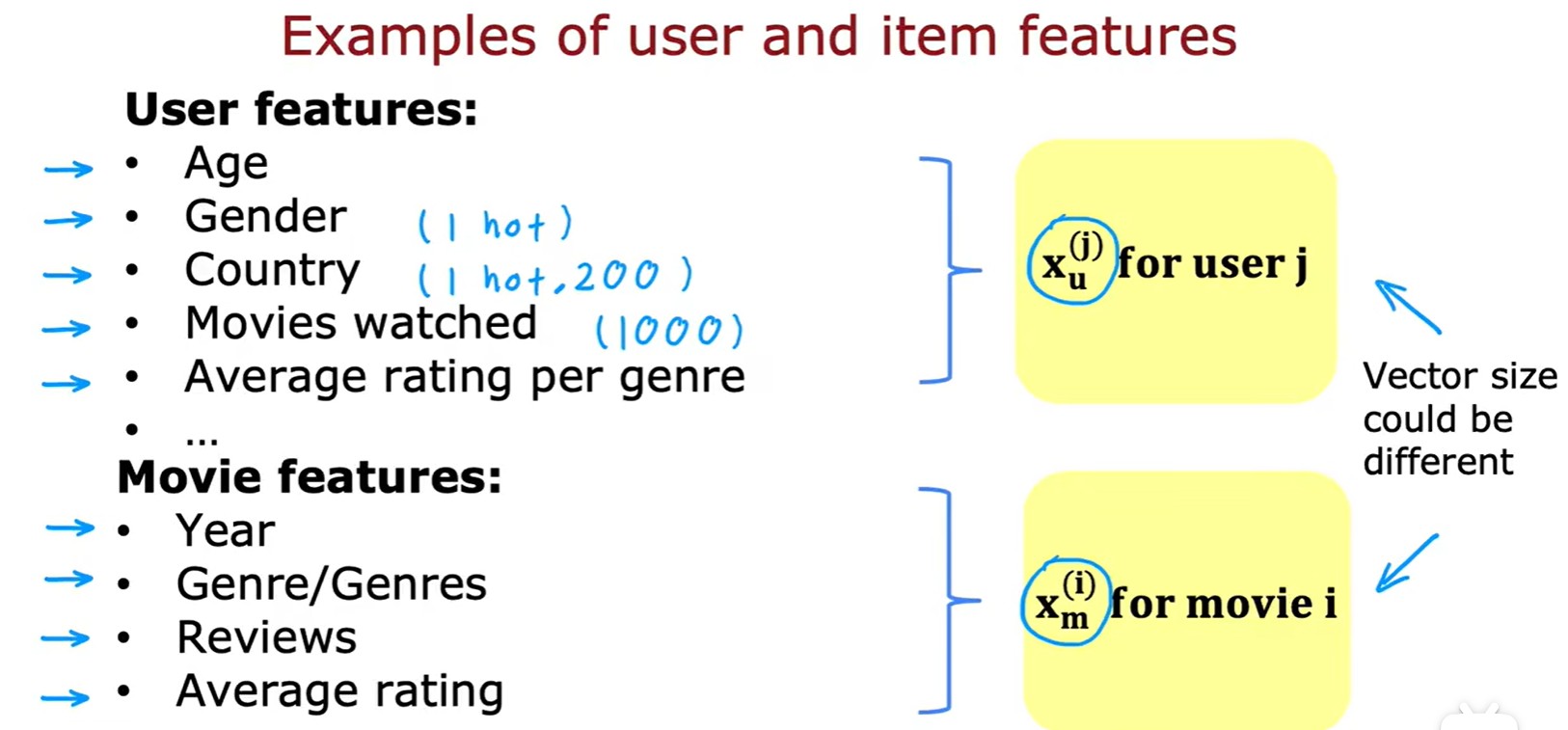
- 基于内容过滤:通过用户和电影的特征,计算两者间的匹配度;
Learning to match
- 通过
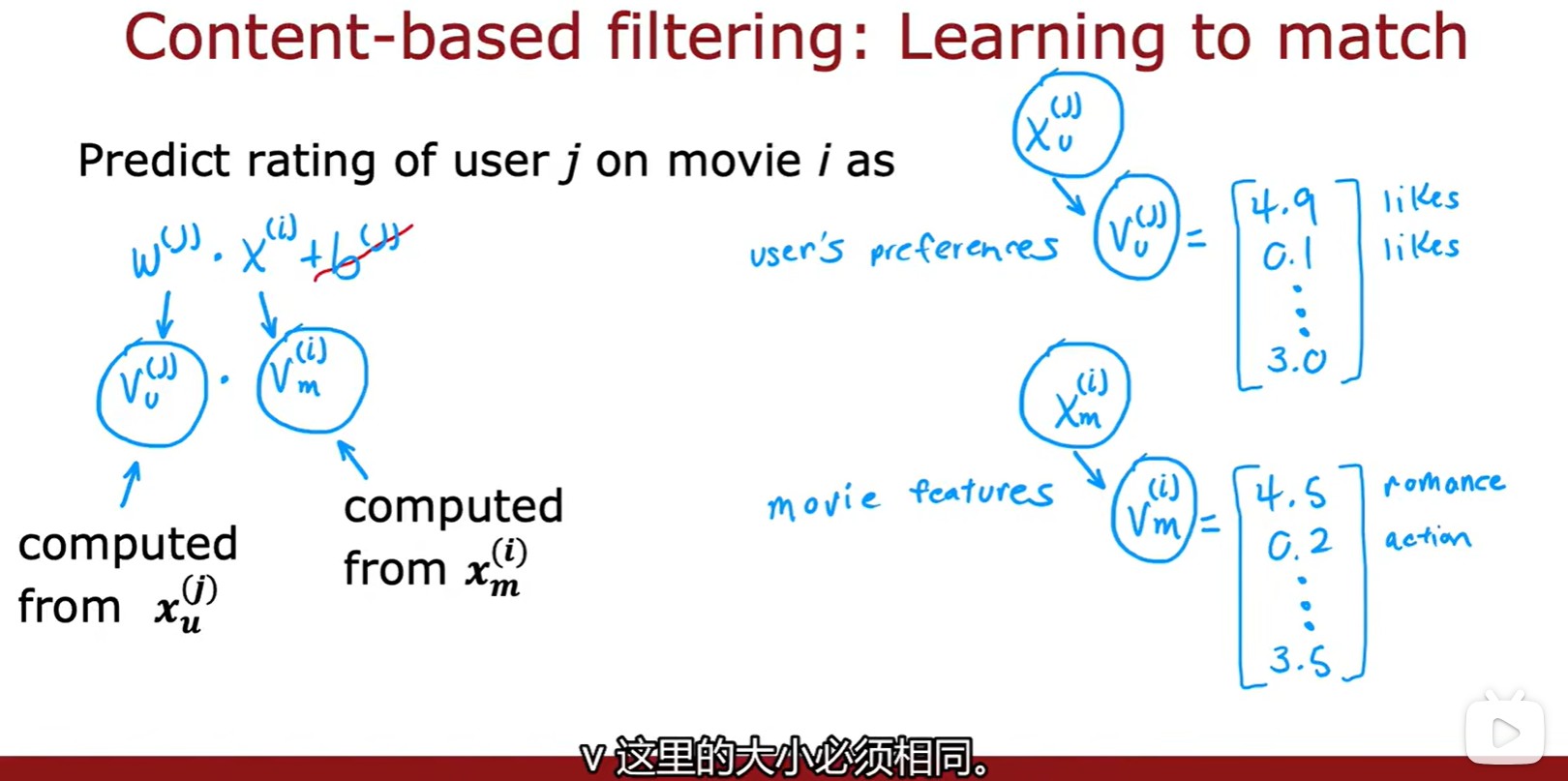
Neural network
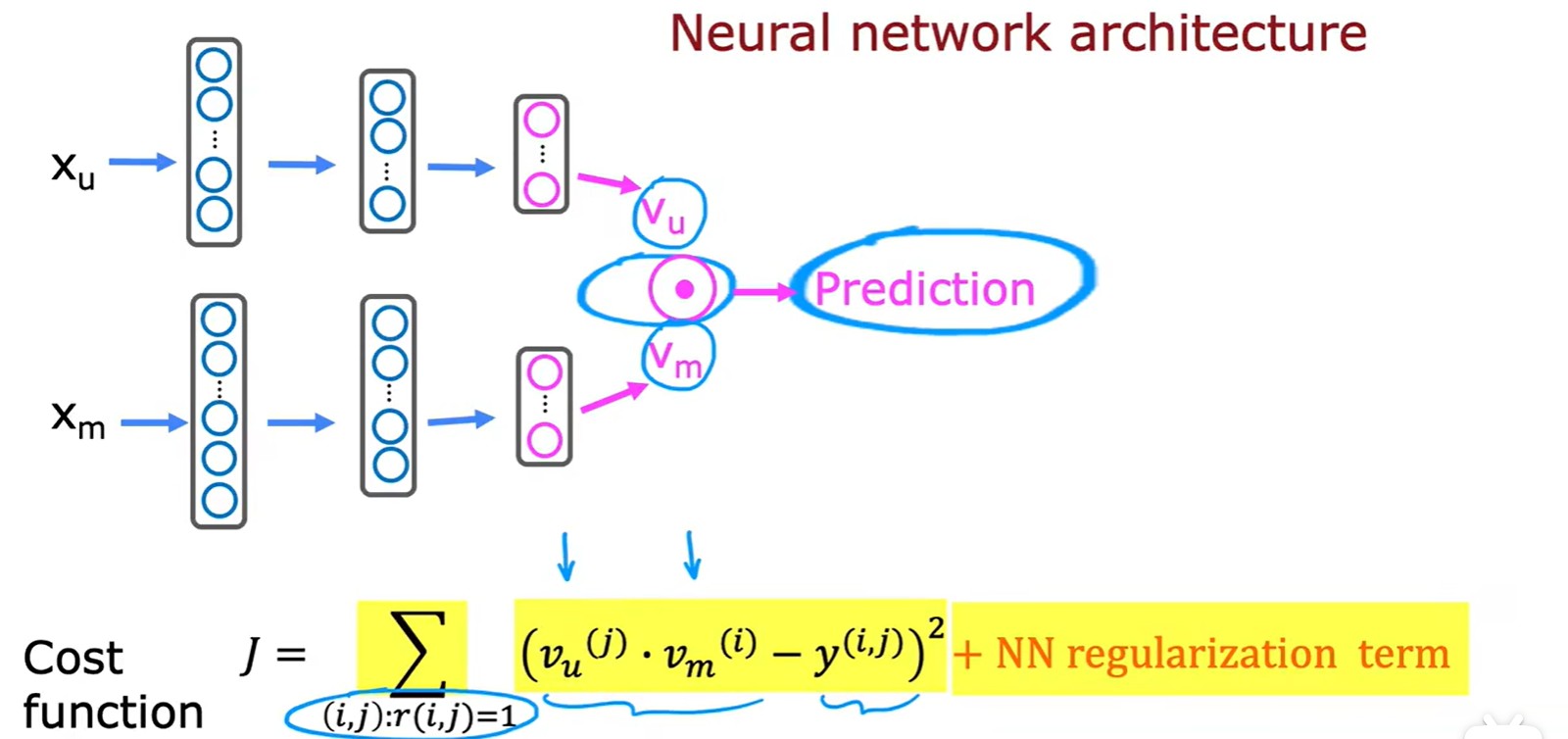
- 利用神经网络将特征向量变换为
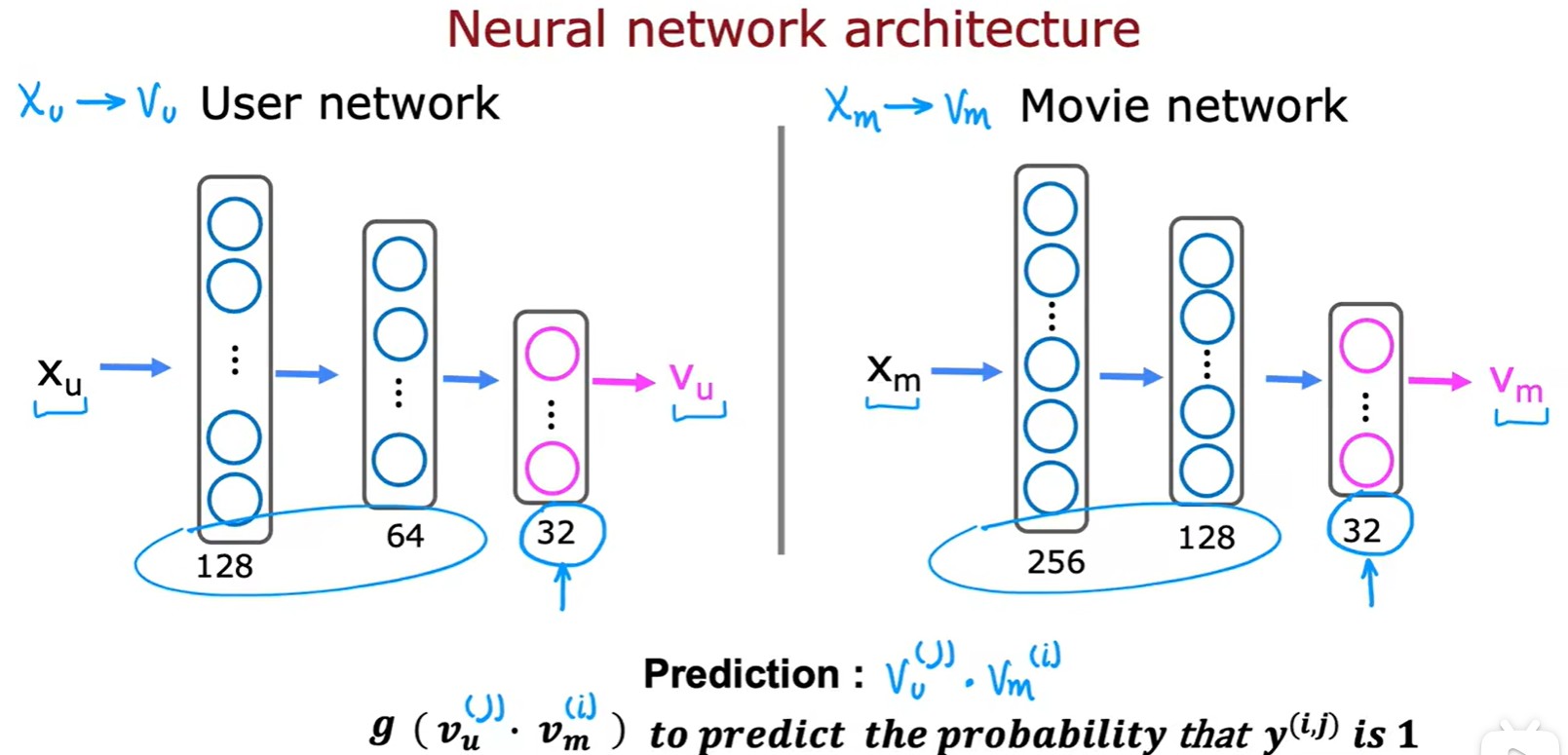
- 计算损失:
- 还可以利用这个方法区找到相似电影:
2.5 Large catalogue
Retrieval
- 第一步是检索:按照计算出的最相似的电影、常看题材的Top10、总榜单Top20,并且删除已经看过的,可以先得到一个粗略的较大列表;
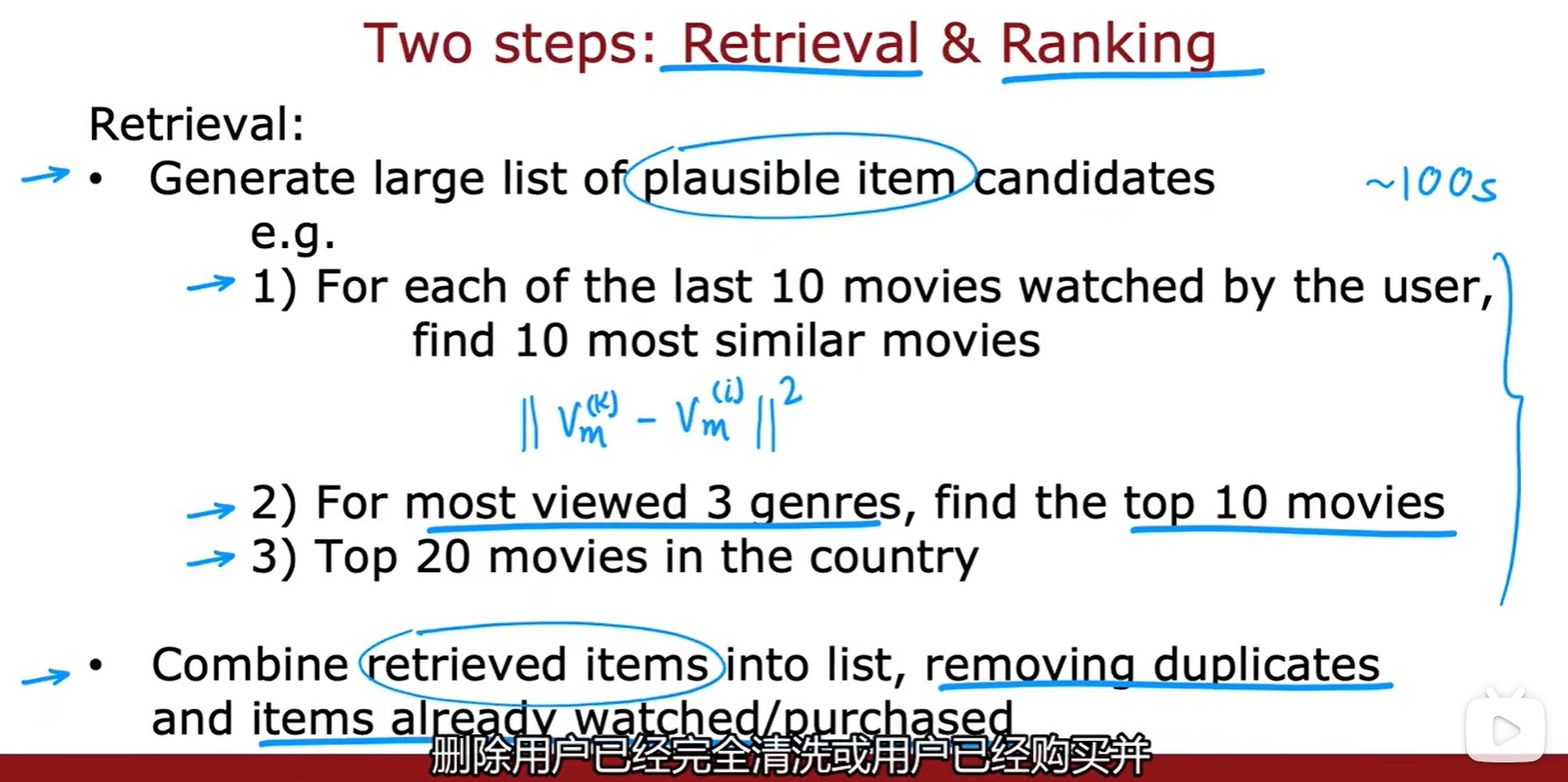
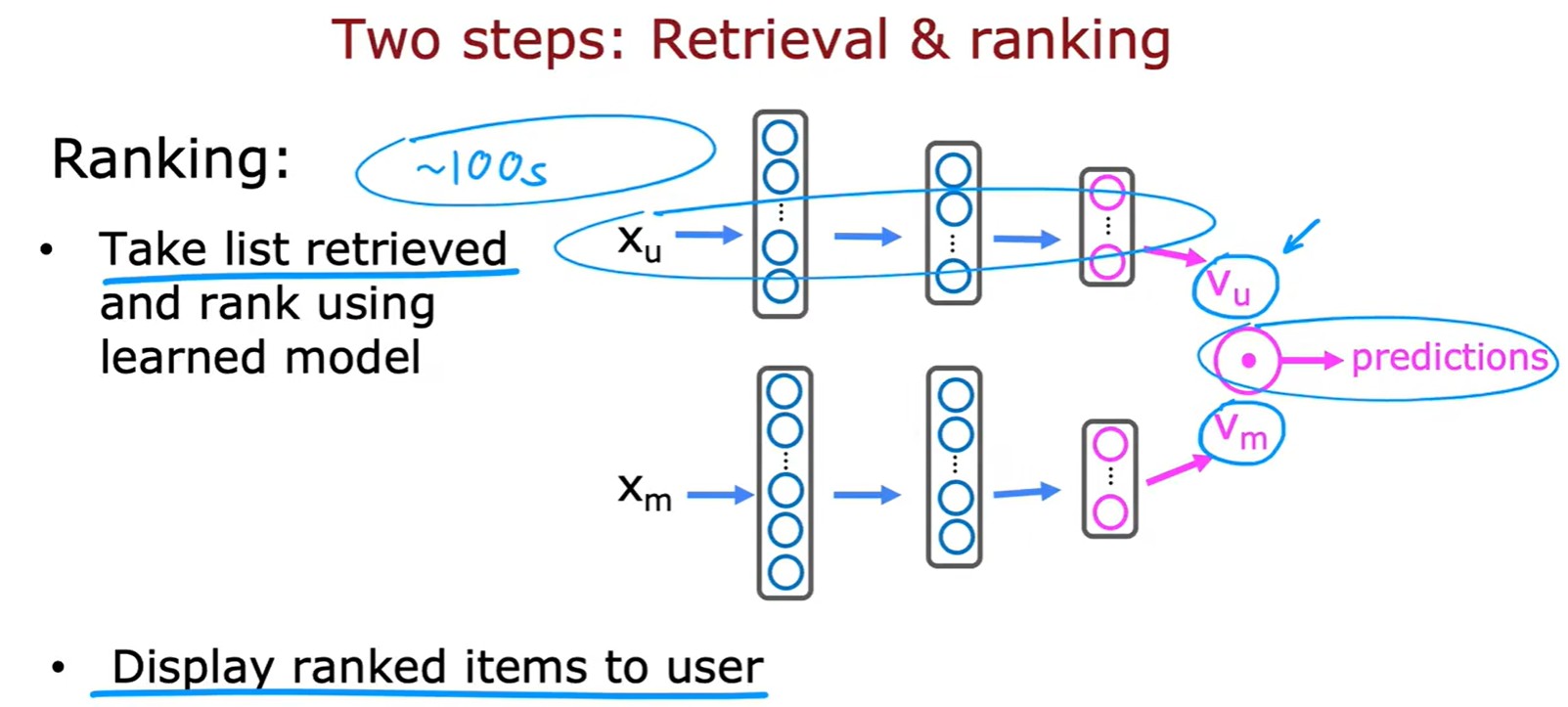
Ranking
- 第二步:将检索的电影带入模型计算预测分数,按照分数进行排名推荐;
Week 3
3.1 Reinforcement Learning
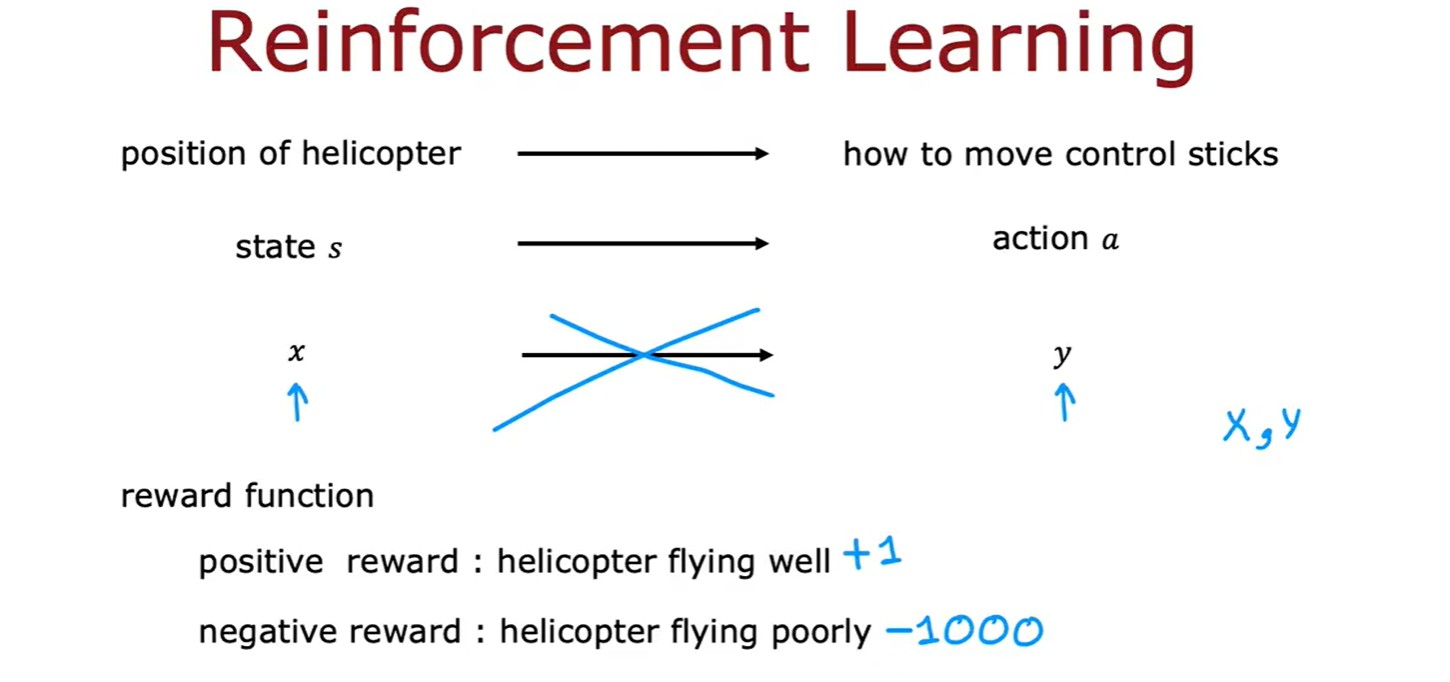
- 强化学习:核心在于指定一个奖励函数,告诉它什么时候做得好,什么时候做的不好,算法的工作是自动找出如何选择好的动作;
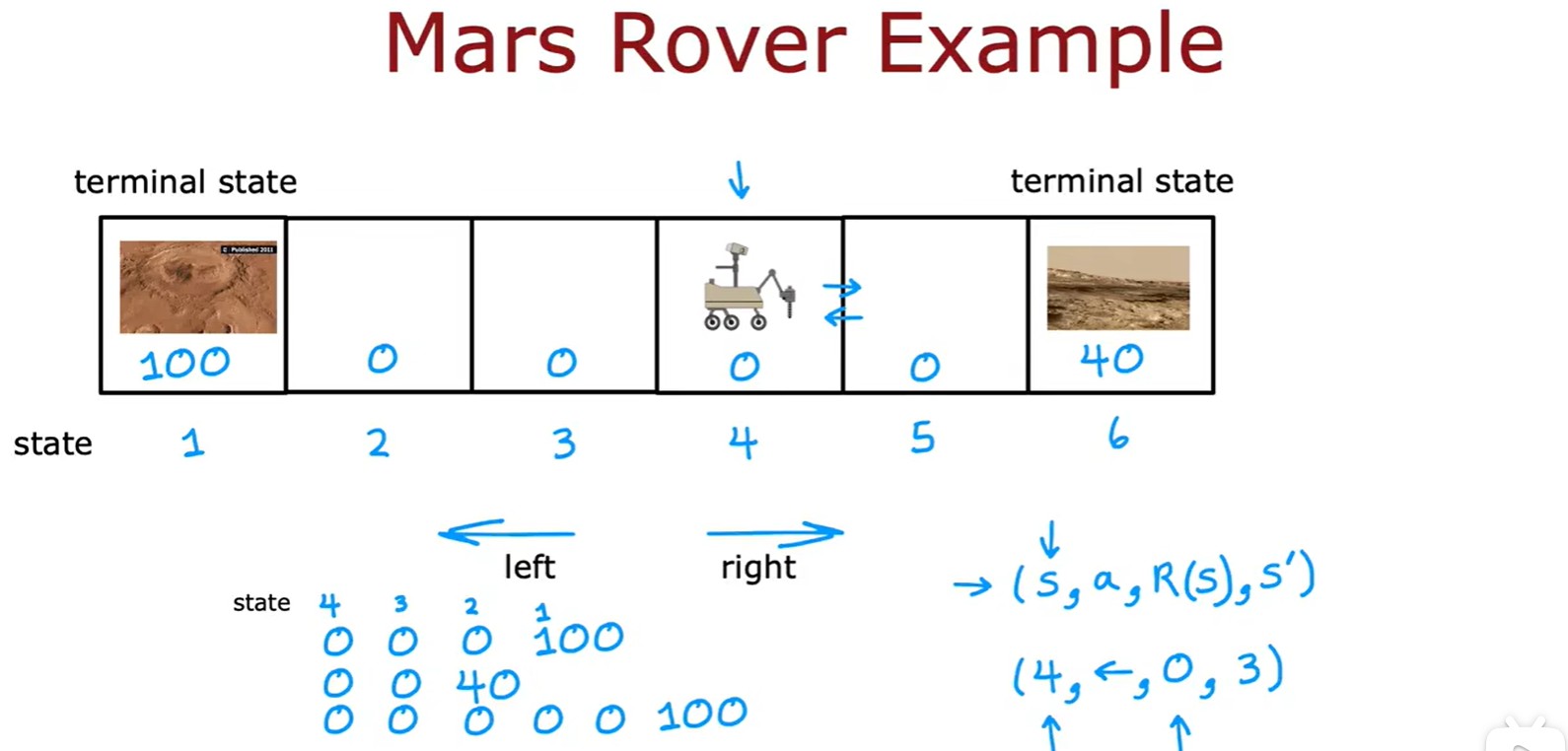
Mars Rover Example
- 火星探测器:这里的(s,a,R(s),s')表示(状态,动作,当前状态的奖励,下一个状态);
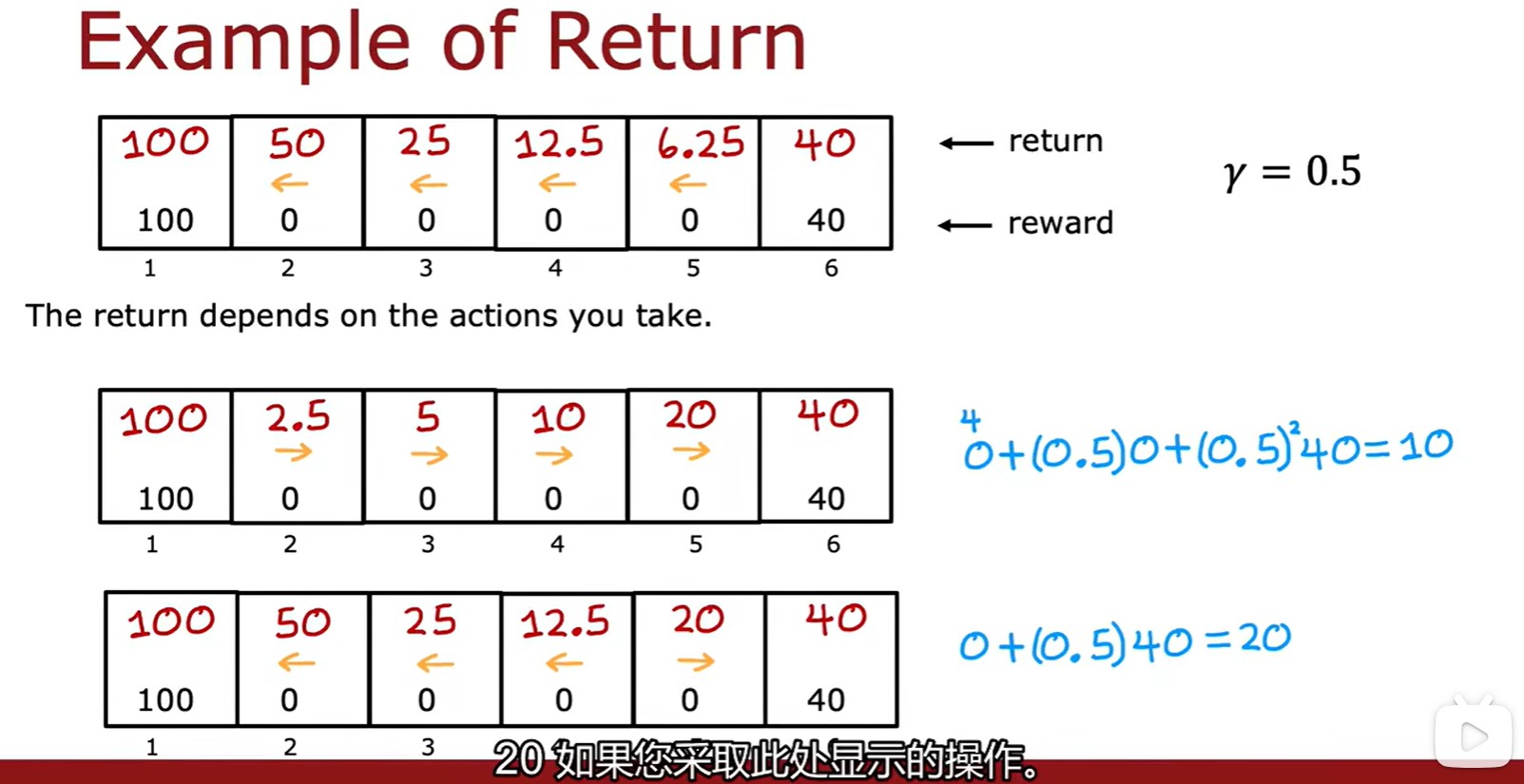
Return
- 强化学习的回报:每走一步都要乘以一个折扣因子,由此计算回报;
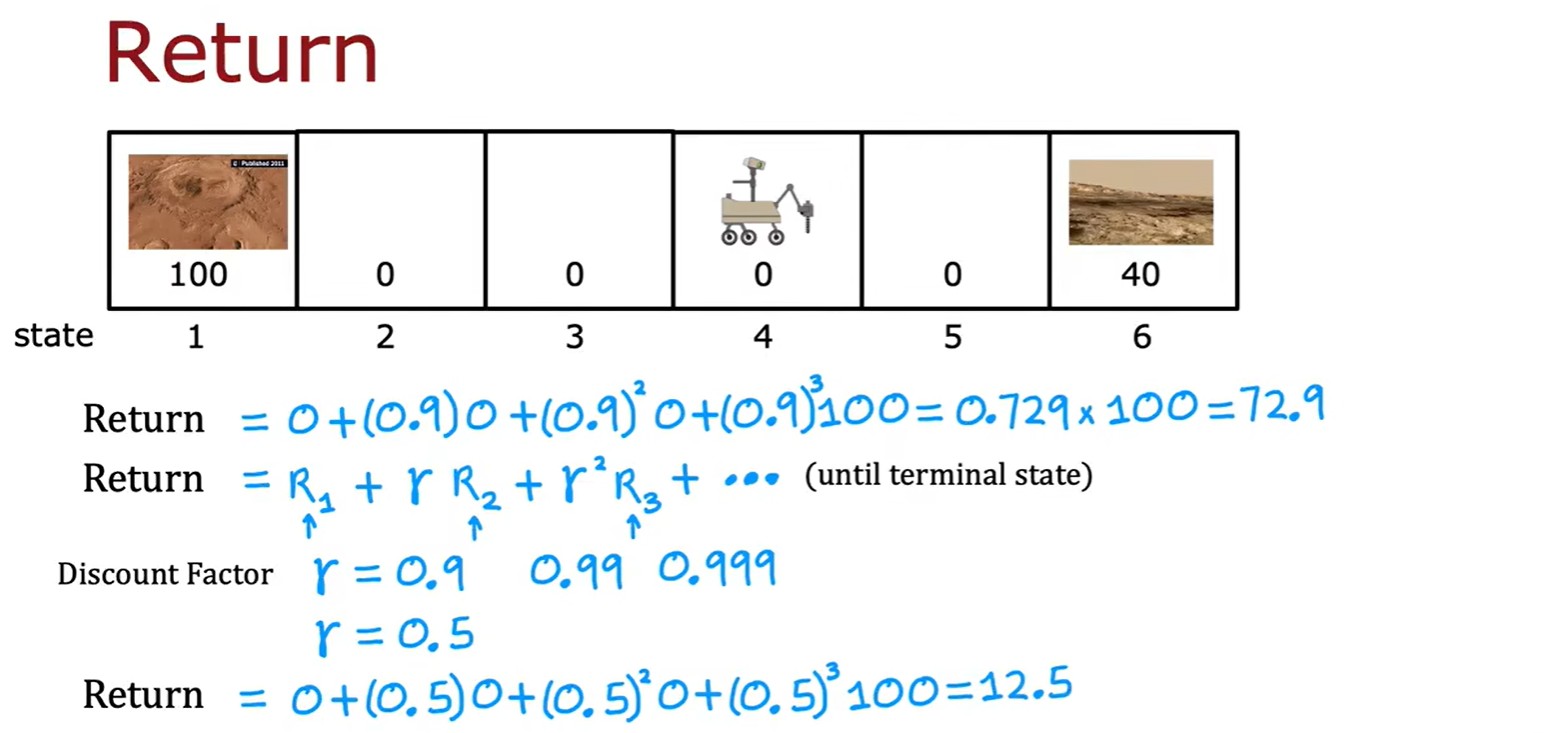
- 这里是几种不同的选择:一直向左、右,还有根据计算结果选择方向;
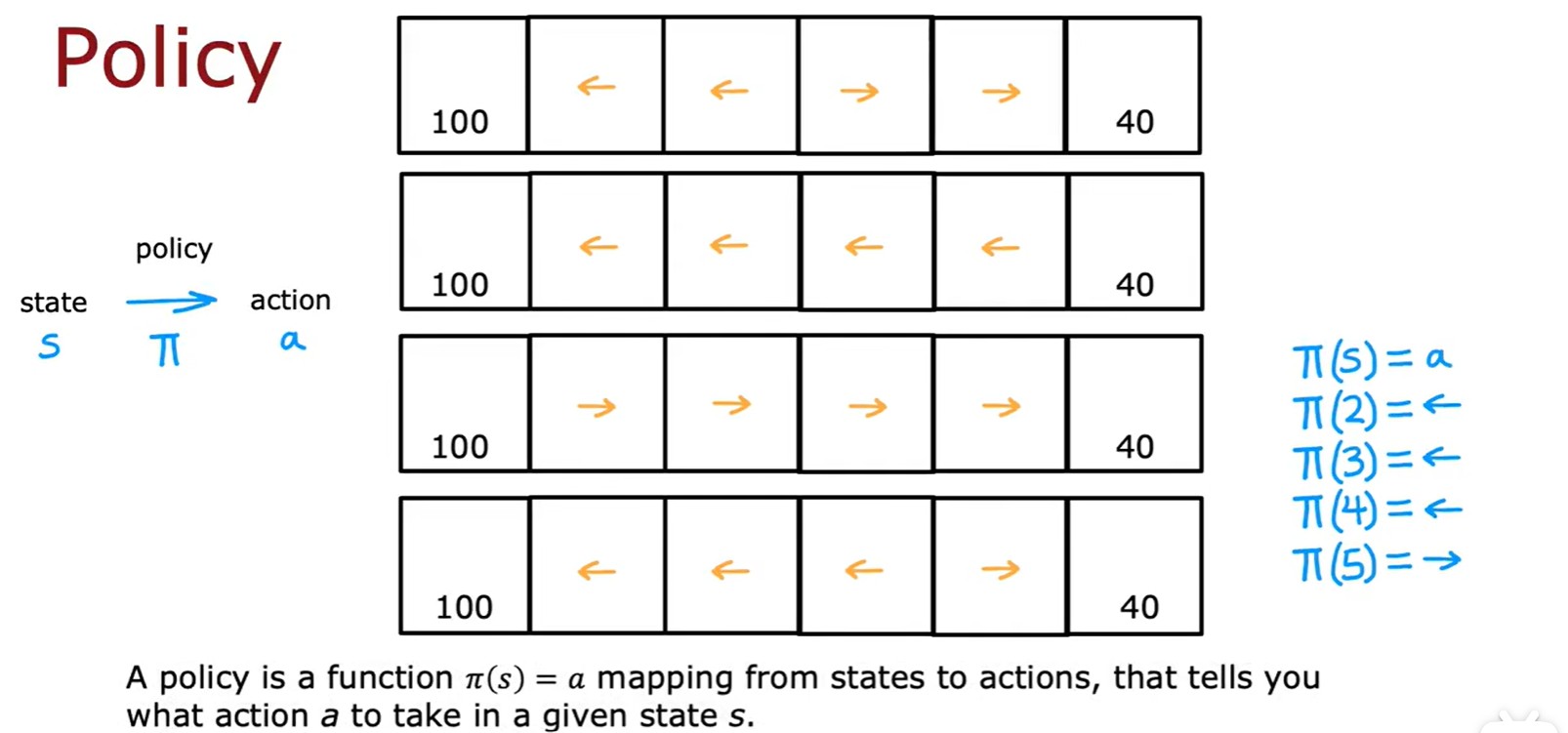
Policy
- 强化学习中的策略:
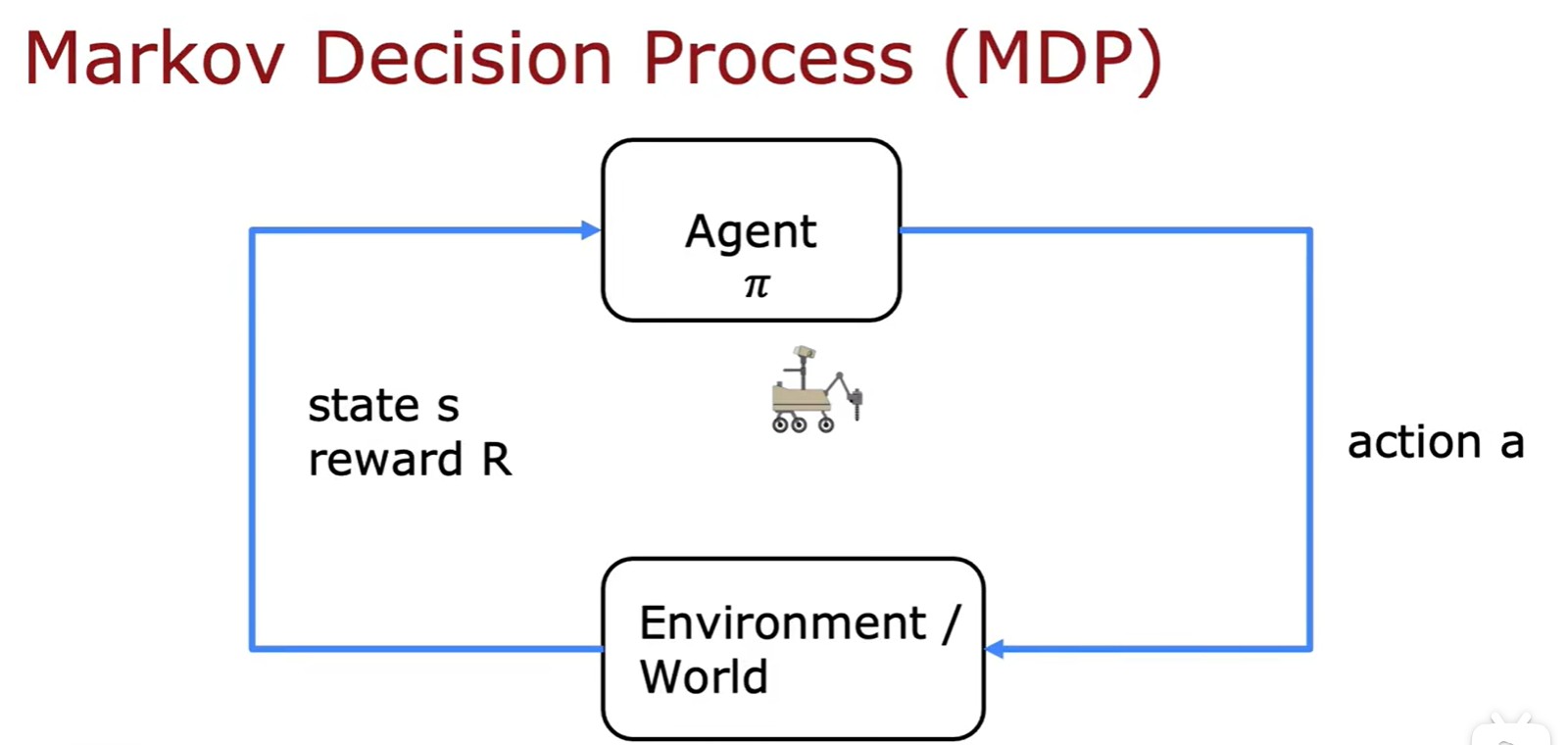
Markov Decision Process
- 马尔科夫决策过程:未来只取决于你现在在哪里,而不管你是怎么到这里的;
3.2 State-action value function
- 状态 - 动作价值函数:Q(s,a)表示在 s 处做出动作 a 得到的回报;
- 注意这里第一个计算的是先向右一步,再掉头的策略;
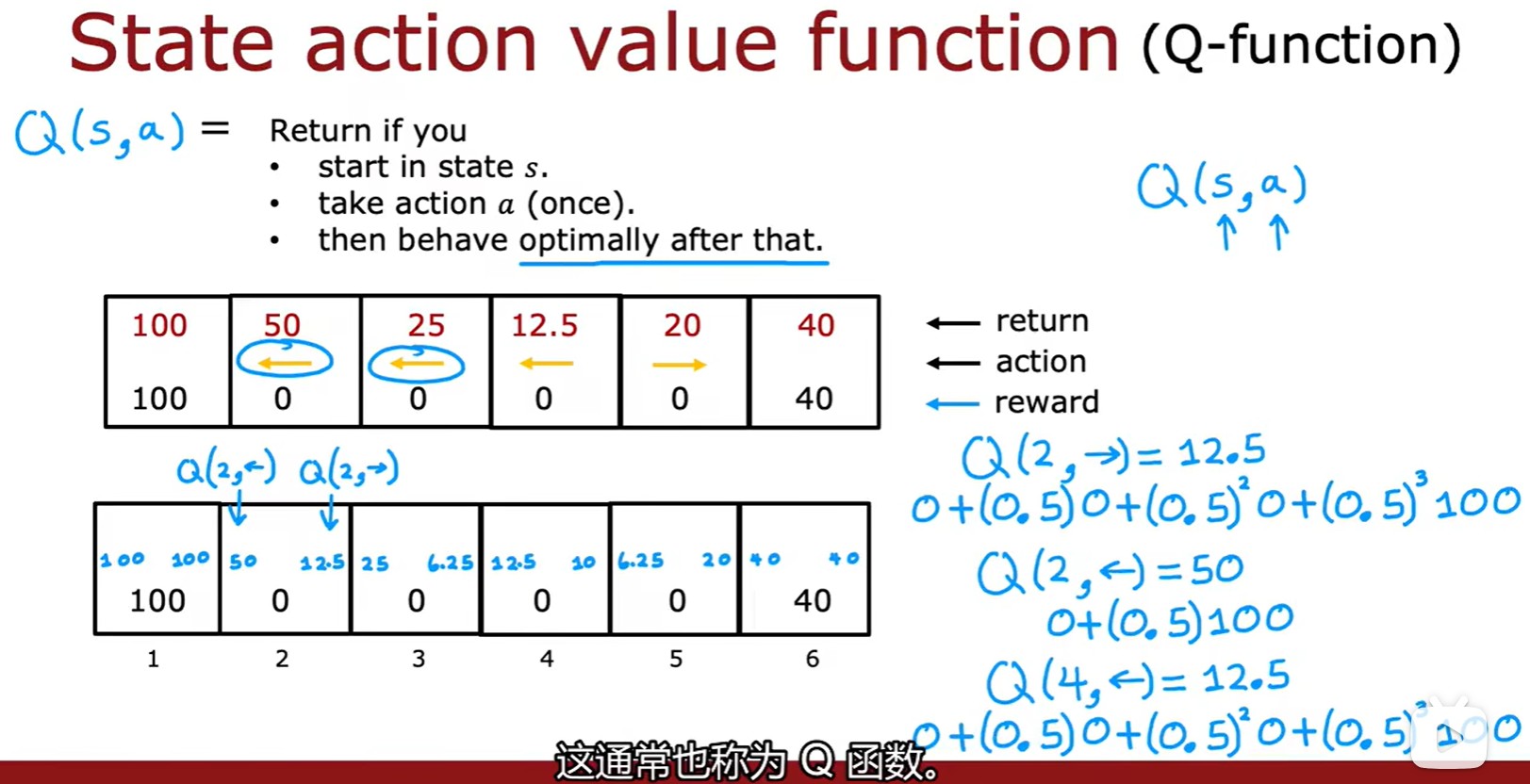
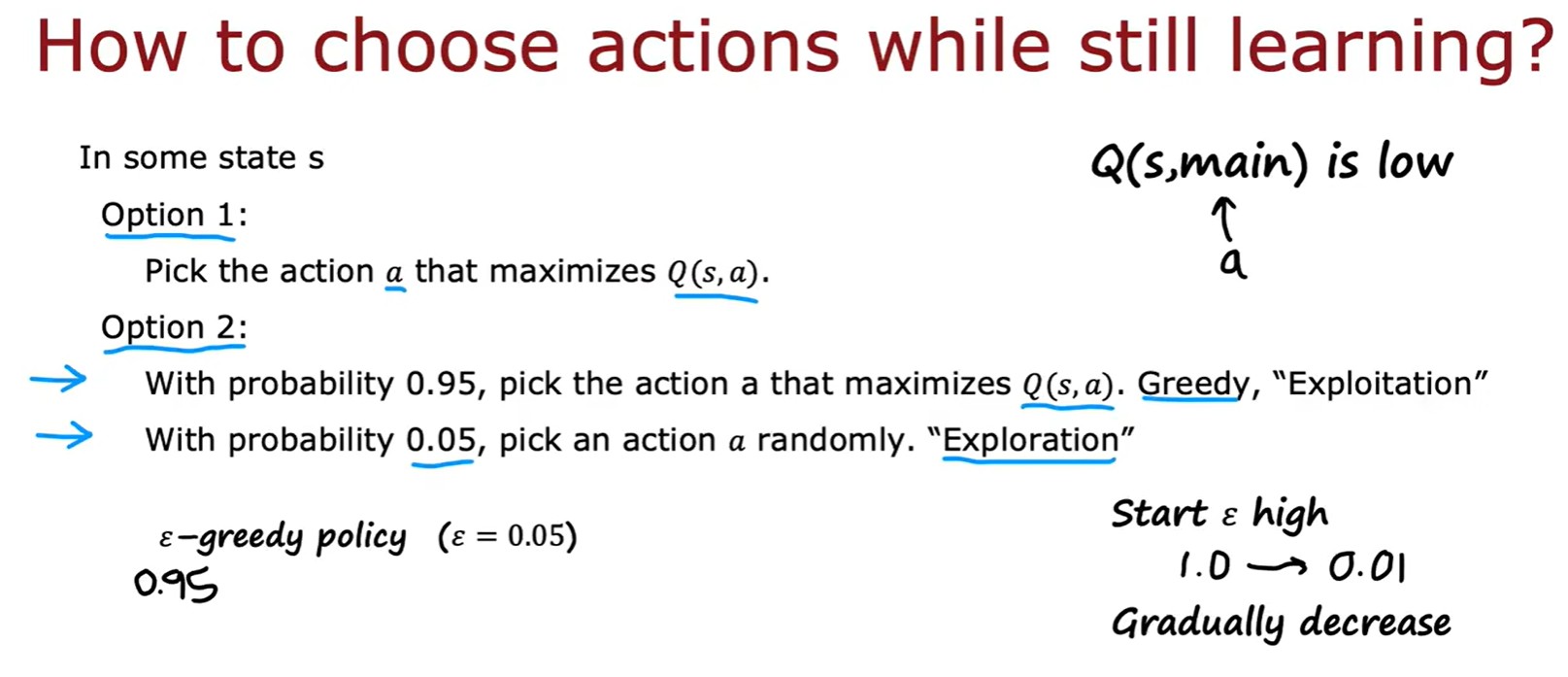
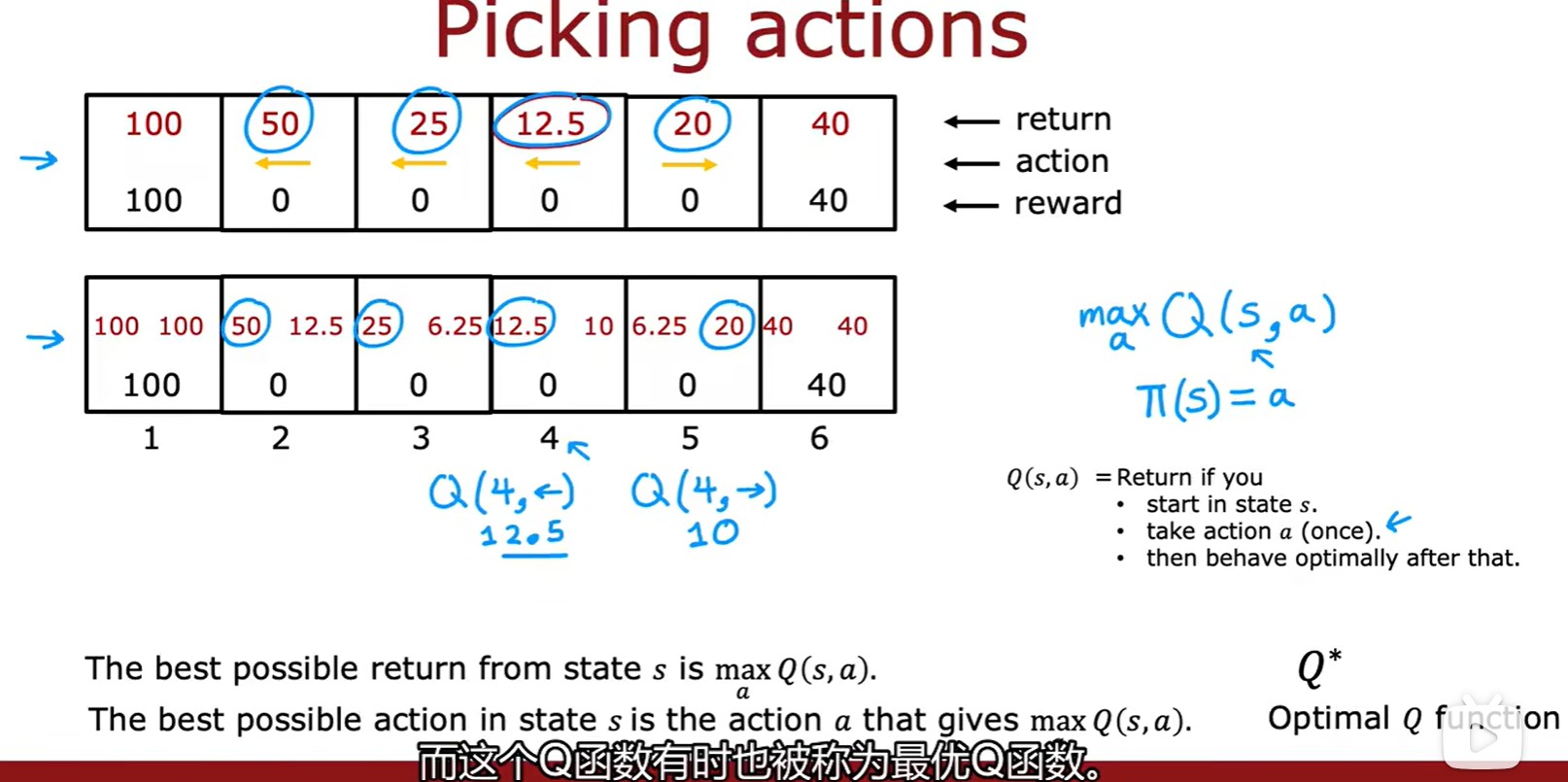
Picking actions
- 如何采取行动:需要选择 Q 函数最大的策略;
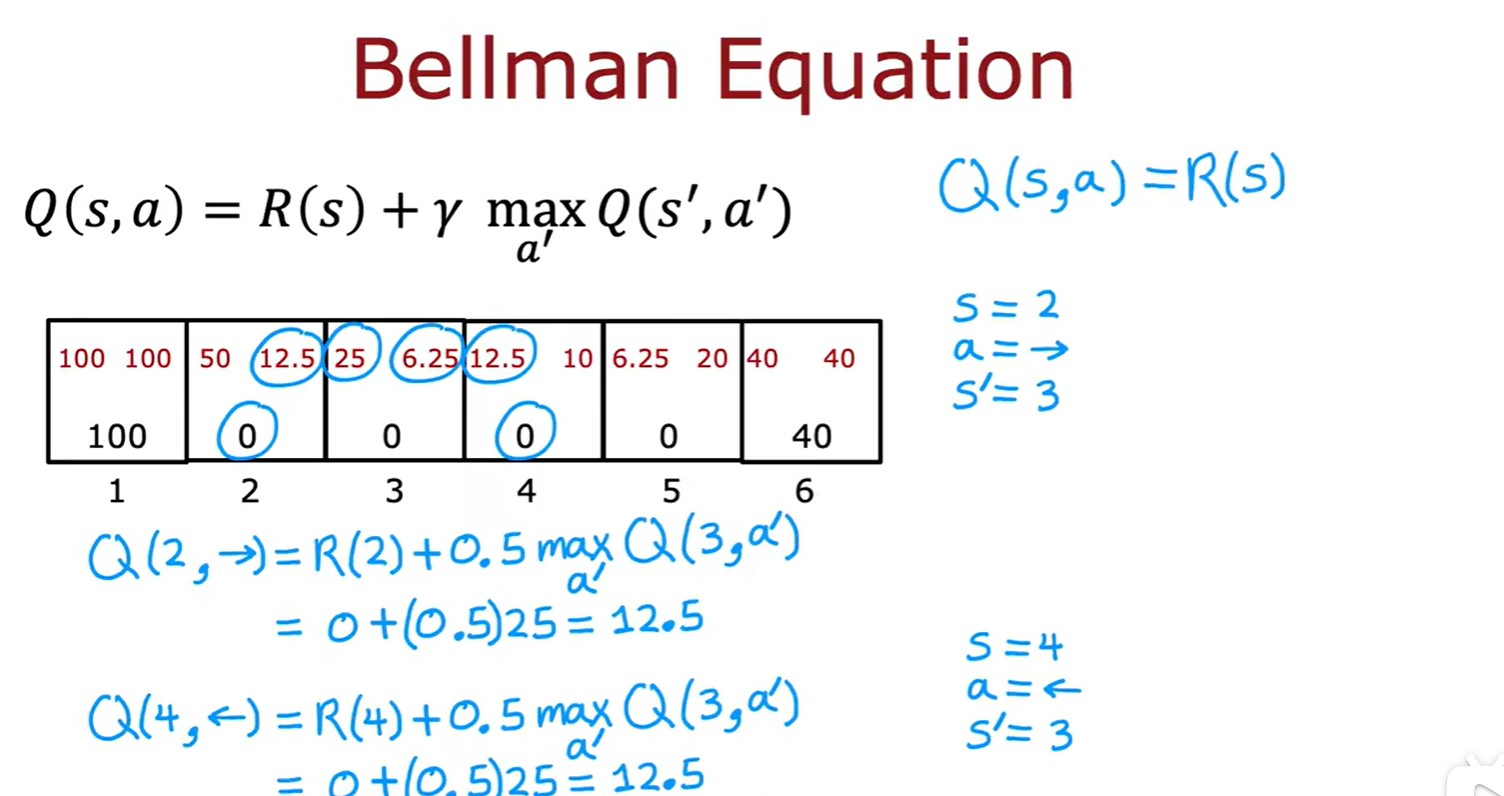
Bellman Equation
- 贝尔曼方程:原理就是递归方程,注意终端状态下计算没有第二项;
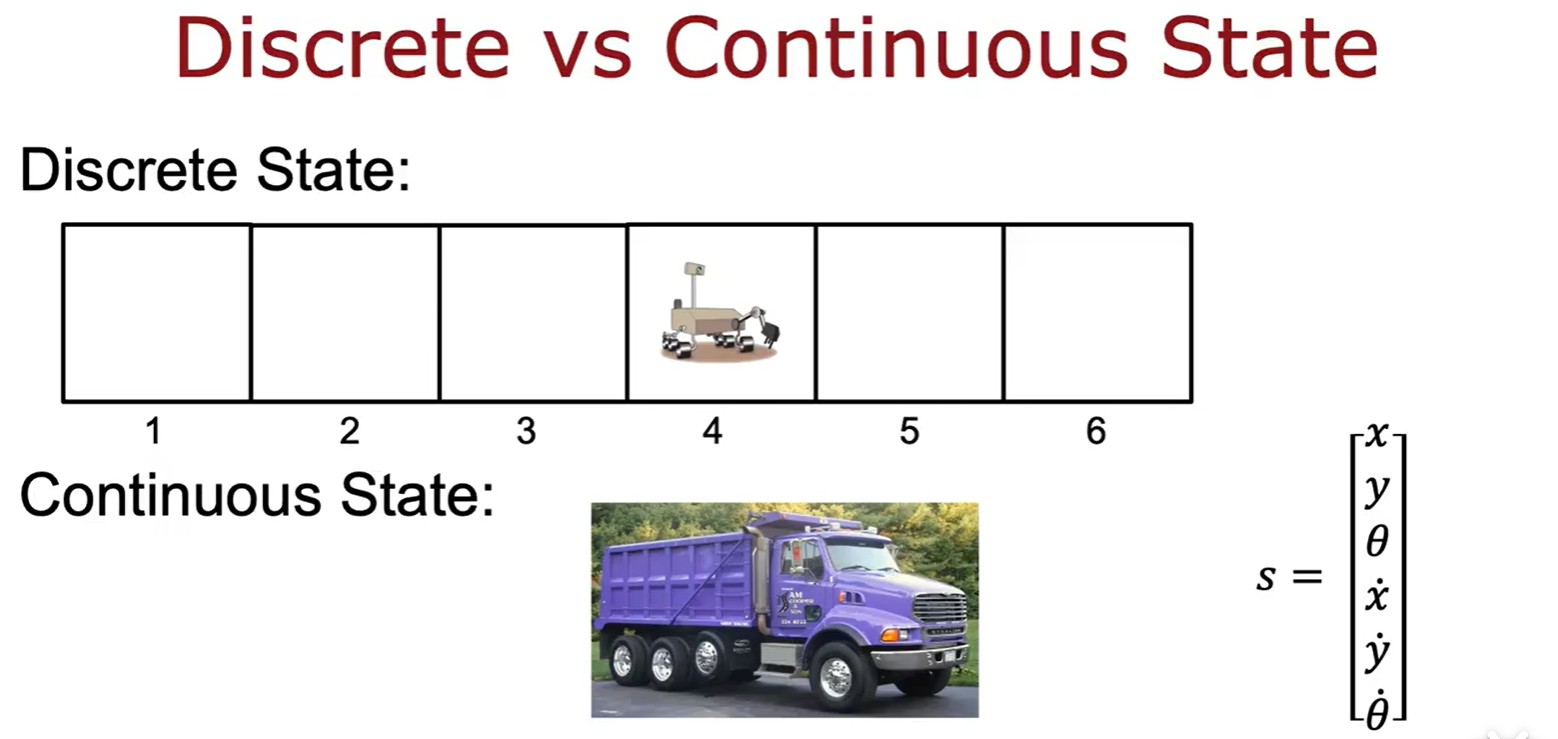
3.3 Continuous State
- 连续状态空间应用:
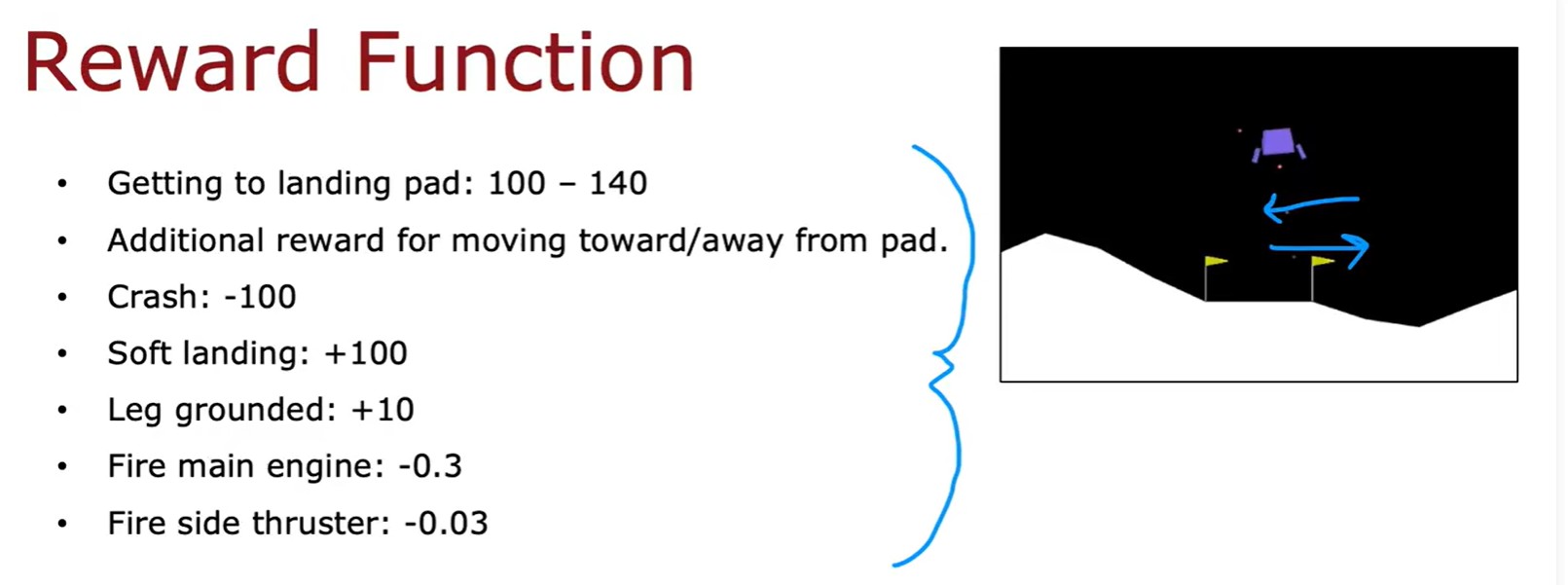
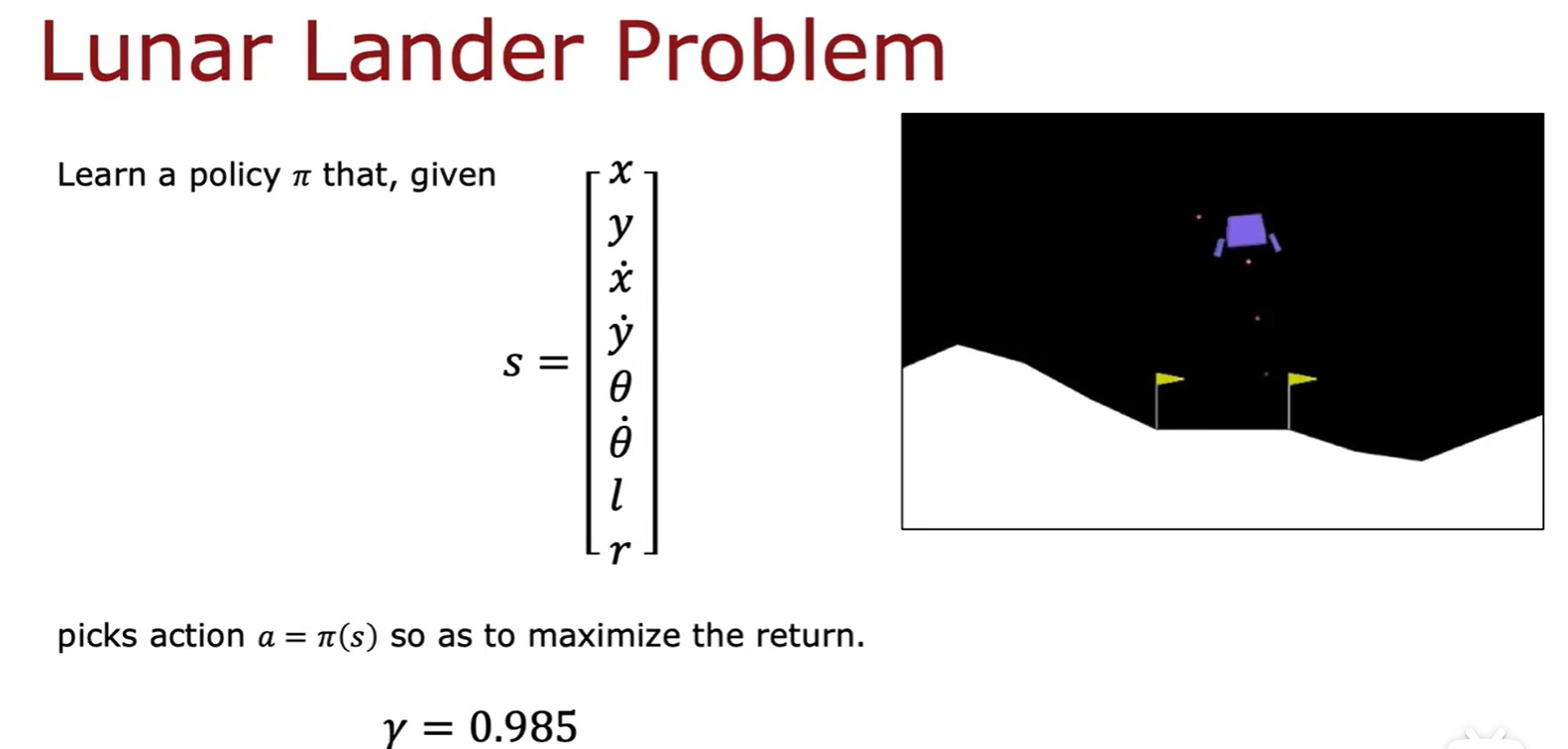
Lunar Lander Problem
- 登月器问题 - 奖励函数:
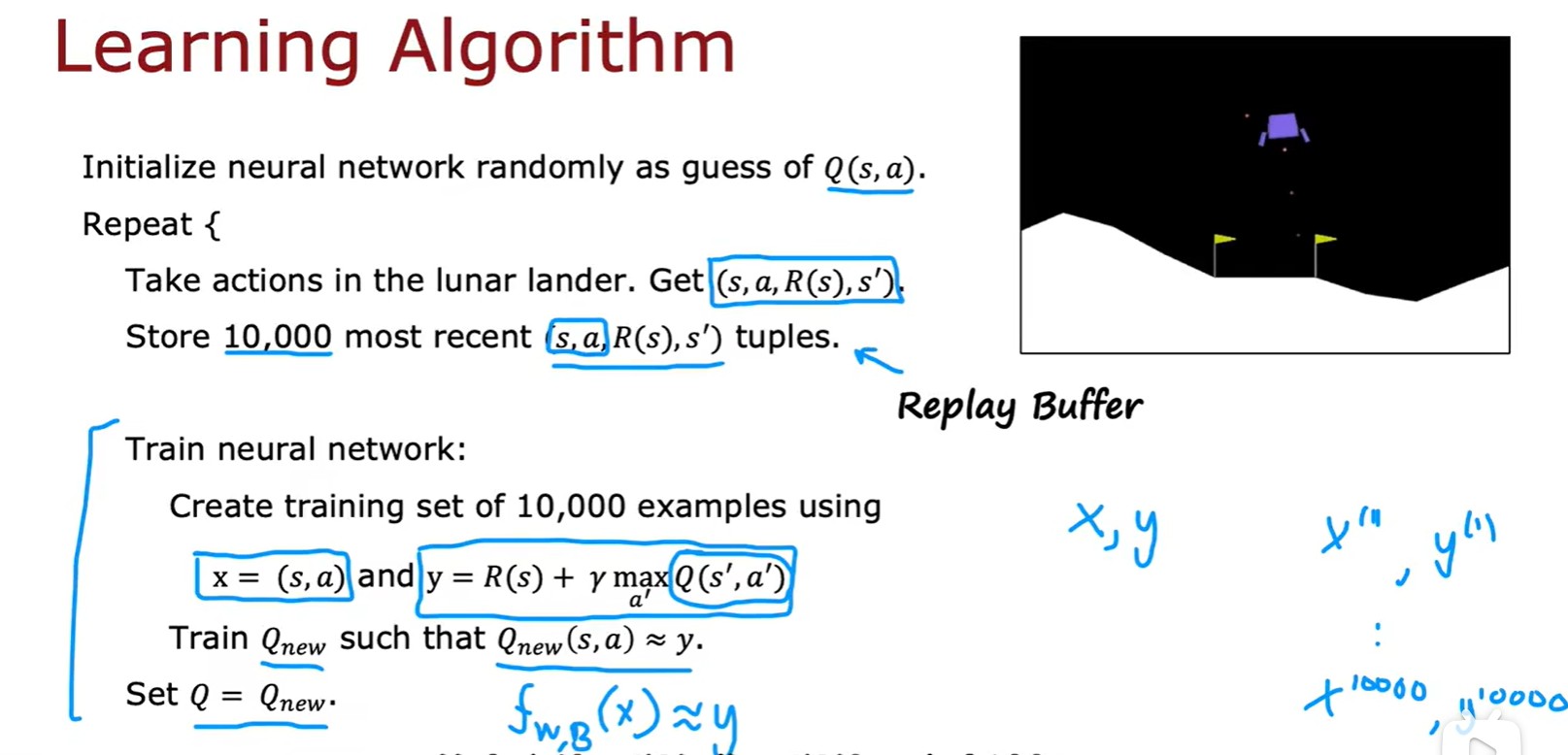
Algorithm
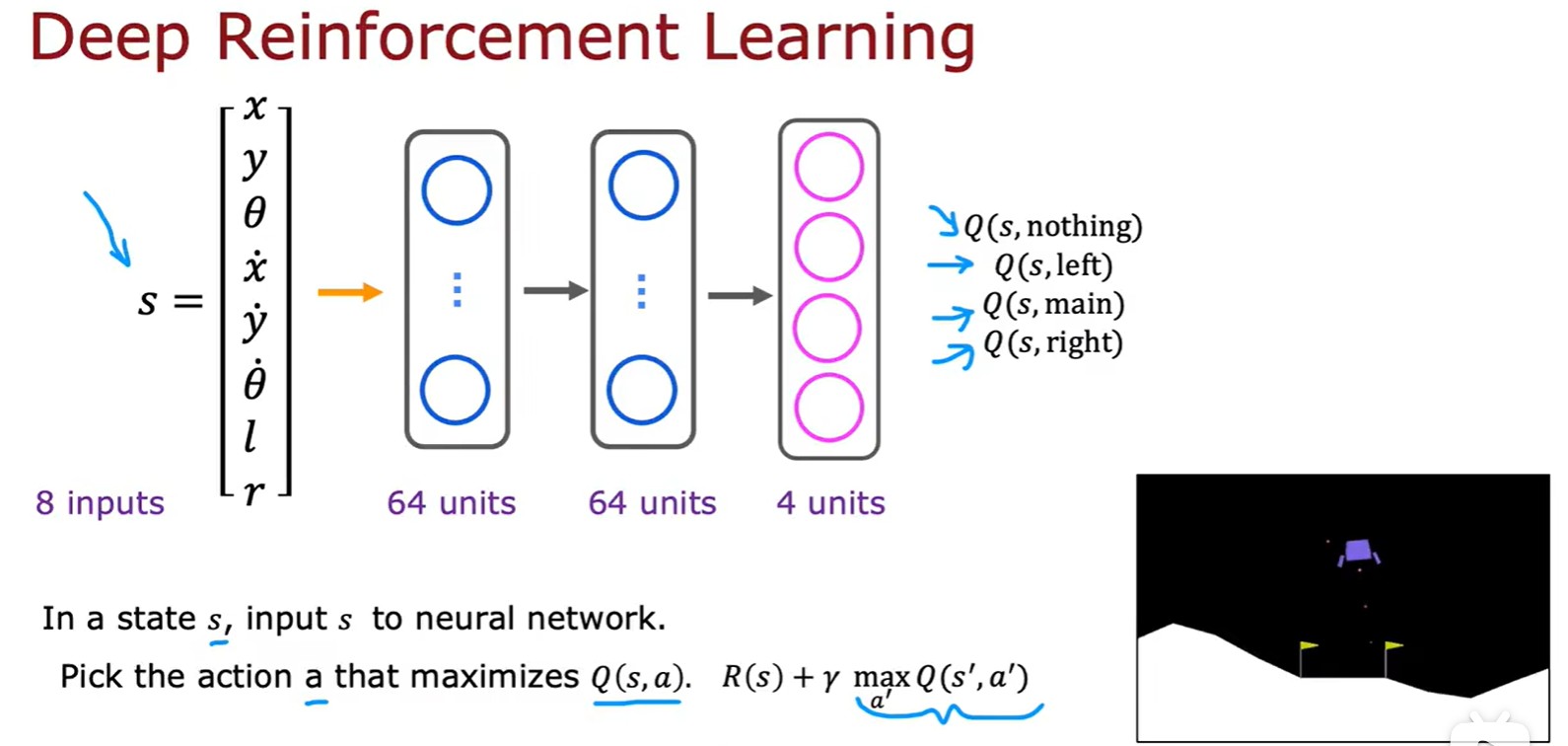
- DQN算法(Deep Q-Network):
- 算法改进:输出值设为 4 个,方便选择最大值;
Epsilon - greedy policy