HUMS问答:https://humsconference.com.au/HUMS2023datachallenge/questions-answers.html
历年试卷:https://humsconference.com.au/Papers.html
参数
| 部件(Component) | 齿轮齿数(No. of Gear Teeth) | 啮合频率(Mesh Freq. (Hz)) |
|---|---|---|
| 输入小齿轮(Input pinion) | 19 | 1900 |
| 输入锥齿轮(Input bevel gear) | 71 | 1900 |
| 太阳轮(Sun gear) | 27 | 568 |
| 行星轮(Planet gear) | 35 | 568 |
| 齿圈(Ring gear) | 99 | 568 |
一、传动说明
这是一份齿轮传动系统部件的参数表,包含以下关键信息:
- 部件类型:涵盖输入小齿轮、输入锥齿轮、太阳轮、行星轮、齿圈,对应传动系统不同功能组件。
- 齿轮齿数:每个部件的齿轮 teeth 数量,是齿轮设计和传动比计算的基础参数。
- 啮合频率:齿轮啮合时的频率(单位 Hz ),反映齿轮运转时的动态特性。例如输入小齿轮和输入锥齿轮啮合频率均为 1900Hz ,说明二者配对传动;太阳轮、行星轮、齿圈啮合频率均为 568Hz ,属于同一组行星排的啮合频率,可用于振动分析、故障诊断(如通过频谱识别啮合频率异常判断齿轮故障 )。
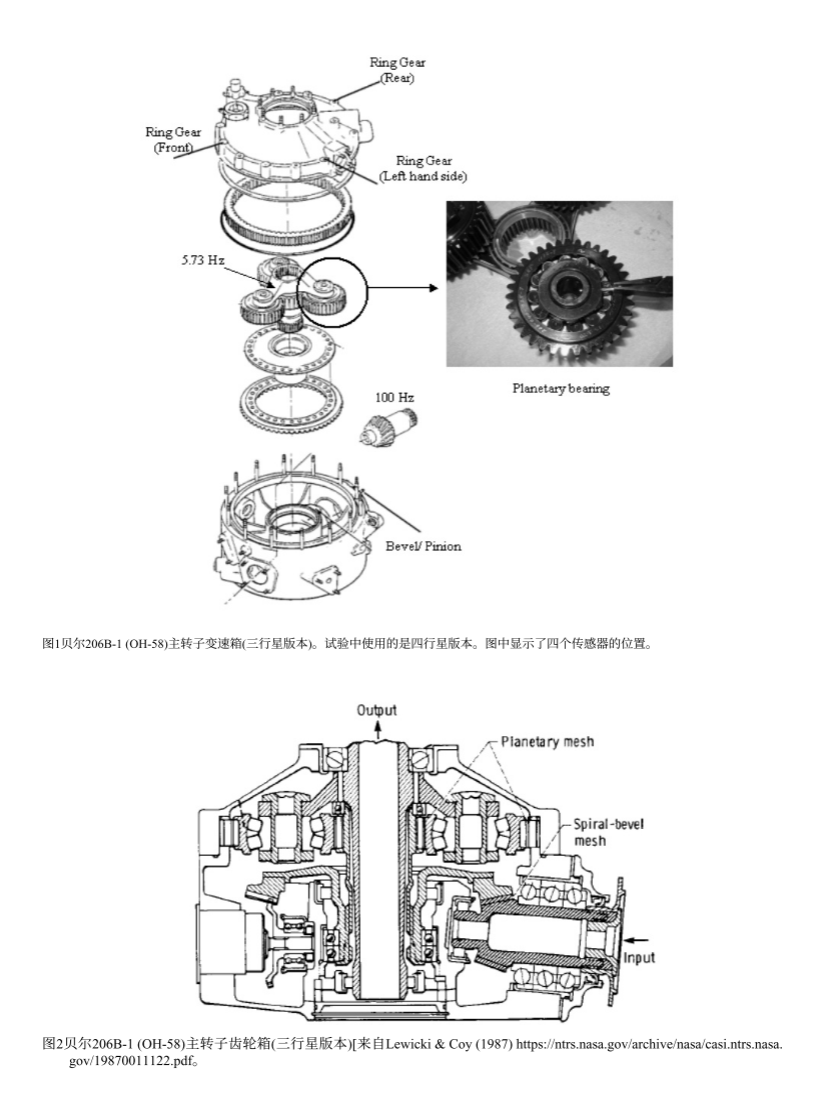
好的,根据您提供的两张图片中的信息,我们可以清晰地还原贝尔206B-1(OH-58)主旋翼变速箱的传动原理。
这是一个两级传动的变速箱:
- 第一级:螺旋锥齿轮传动 - 改变动力传递方向。
- 第二级:行星齿轮传动 - 实现大的减速比。
其传动路径和原理如下图所示:
螺旋锥齿轮啮合 行星齿轮啮合 行星轮在固定齿圈上滚动 固定不转 输入动力
高速、低扭矩
6000 RPM 输入小齿轮
19齿 输入锥齿轮
71齿 太阳轮
27齿 行星轮
35齿 x 4个 行星架 输出动力
低速、高扭矩
约 344 RPM 内齿圈
99齿
二、关键参数与计算验证
根据您提供的表1数据(输入转速6000 RPM或100 Hz),我们可以验证一些关键频率:
- 采样频率 (Input RPM): 526个mat文件,每个文件4个通道(传感器),每个通道405405个数据,振动数据是同步平均的(即游动齿平均),因此数据是根据轴角(或转数)而不是时间重新采样的,每个数据文件的数据长度相当于约 6.1 秒(输出轴旋转 35 圈,因此 35 / 5.73333 = 6.1),基于标称输出轴转速 5.73333 Hz。原始数据的原始采样率为 65573.77049180328 Hz,由 NI-DAQ 板卡确定,但与平均数据无关。因此,用于计算齿间游动平均值的重采样率为行星齿轮每转 99 圈或行星架每转 35 圈 405405 个样本。
- 输入轴转频 : 6000 RPM / 60 = 100 Hz
- 螺旋锥齿轮啮合频率 :
输入小齿轮齿数 * 输入轴转频= 19 teeth * 100 Hz = 1900 Hz ✅ - 行星级啮合频率(GMF) :
太阳轮齿数 * 太阳轮绝对转频= 27 teeth * 21.05 Hz ≈ 568 Hz ✅
📍 传感器位置与监测点
图1中标注的四个传感器位置分别用于监测不同的故障特征:
- 输入小齿轮:监测1900Hz附近的啮合频率及其边带。
- 齿圈前:监测568Hz附近的啮合频率及其边带。
- 齿圈左:监测轴承的故障特征频率(如外圈、内圈、滚动体故障频率)。
- 齿圈后:监测行星轮通过内齿圈局部缺陷时产生的低频冲击(如5.73Hz)。
这个变速箱的传动设计非常经典:
- 锥齿轮级 高效地改变了动力方向。
- 行星齿轮级 在紧凑的空间内实现了巨大的减速比,输出低转速、高扭矩的动力来驱动主旋翼。
根据贝尔206B-1主旋翼变速箱的传动原理和具体参数,我们现在可以系统地计算各个关键零件的理论故障特征频率。
三、计算基础参数
- 采样频率 (Input RPM): 原始数据的原始采样率为 65573.77049180328 Hz
- 输入转速 (Input RPM): 6000 RPM
- 输入转频 (Input Shaft Freq, finputf_{input}finput): 600060=100 Hz\frac{6000}{60} = 100 \text{ Hz}606000=100 Hz
- 行星架转频 (Carrier Freq, fcf_cfc)): 约 5.73 Hz (根据图1标注)
- 啮合频率 (Gear Mesh Frequency, GMF): 568 Hz (根据表1)
1. 螺旋锥齿轮级故障特征频率
| 部件 | 故障特征 | 计算公式 | 计算值 (Hz) |
|---|---|---|---|
| 输入小齿轮 | 转频 | finput=100 Hzf_{input} = 100 \text{ Hz}finput=100 Hz | 100 |
| (19齿) | 局部故障频率 | 1×finput1 \times f_{input}1×finput | 100 |
| 2×finput2 \times f_{input}2×finput | 200 | ||
| 锥齿轮 | 转频 | finput×NpinionNbevel=100×1971f_{input} \times \frac{N_{pinion}}{N_{bevel}} = 100 \times \frac{19}{71}finput×NbevelNpinion=100×7119 | 26.76 |
| (71齿) | 局部故障频率 | 1×26.76 Hz1 \times 26.76 \text{ Hz}1×26.76 Hz | 26.76 |
| 啮合点 | 啮合频率 | Npinion×finput=19×100N_{pinion} \times f_{input} = 19 \times 100Npinion×finput=19×100 | 1900 |
故障征兆 :在振动频谱中,若在1900 Hz 的啮合频率及其谐波(3800 Hz, 5700 Hz...)周围出现以100 Hz 或26.76 Hz 为间隔的边带,通常表明螺旋锥齿轮副中存在局部故障(如点蚀、裂纹)。
2. 行星齿轮级故障特征频率
行星齿轮系统的故障特征频率计算最为复杂,因为存在行星轮的公转和自转。
| 部件 | 故障特征 | 计算公式 | 计算值 (Hz) |
|---|---|---|---|
| 太阳轮 | 绝对转频 | fc×(1+NrNs)=5.73×(1+9927)f_{c} \times (1 + \frac{N_r}{N_s}) = 5.73 \times (1 + \frac{99}{27})fc×(1+NsNr)=5.73×(1+2799) | 26.76 (与锥齿轮同轴) |
| (27齿) | 局部故障频率 (FTF) | NrNs×fc=9927×5.73\frac{N_r}{N_s} \times f_c = \frac{99}{27} \times 5.73NsNr×fc=2799×5.73 | 21.0 |
| 故障通过频率 | Nplanets×fc=4×5.73N_{planets} \times f_c = 4 \times 5.73Nplanets×fc=4×5.73 | 22.92 | |
| 行星轮 | 自转转频 | fc×NrNp=5.73×9935f_c \times \frac{N_r}{N_p} = 5.73 \times \frac{99}{35}fc×NpNr=5.73×3599 | 16.21 |
| (35齿, 4个) | 公转转频 | fc=5.73f_c = 5.73fc=5.73 | 5.73 |
| 局部故障频率 (FTF) | 2×fc×NrNp=2×5.73×99352 \times f_c \times \frac{N_r}{N_p} = 2 \times 5.73 \times \frac{99}{35}2×fc×NpNr=2×5.73×3599 | 32.42 | |
| 内齿圈 | 局部故障频率 | Nplanets×fc=4×5.73N_{planets} \times f_c = 4 \times 5.73Nplanets×fc=4×5.73 | 22.92 |
| (99齿, 固定) | 行星轮通过频率 | Nplanets×fc=4×5.73N_{planets} \times f_c = 4 \times 5.73Nplanets×fc=4×5.73 | 22.92 |
| 行星架 | 转频 | fc=5.73f_c = 5.73fc=5.73 | 5.73 |
| 啮合点 | 啮合频率 (GMF) | Ns×(fs)=27×26.76≈568N_s \times (f_s) = 27 \times 26.76 \approx 568Ns×(fs)=27×26.76≈568 | 568 |
故障征兆:
- 太阳轮/行星轮故障 :在568 Hz 的啮合频率及其谐波周围,出现以太阳轮FTF(21.0 Hz) 或行星轮FTF(32.42 Hz) 为间隔的边带。
- 内齿圈故障 :在啮合频率周围出现以行星轮通过频率(22.92 Hz) 为间隔的边带。
- 行星轮局部故障 :其振动信号还会被其公转频率(5.73 Hz) 调制。
3. 行星轮轴承故障特征频率
行星轮轴承的故障频率计算需要其几何参数(滚子数、节径、接触角等),这些参数通常未在您提供的资料中给出。但其计算逻辑如下:
| 故障类型 | 大致计算公式(需具体参数) | 说明 |
|---|---|---|
| 内圈故障 | BPFI≈Nb2×frotor×(1+BdPdcosθ)BPFI \approx \frac{N_b}{2} \times f_{rotor} \times (1 + \frac{B_d}{P_d} \cos\theta)BPFI≈2Nb×frotor×(1+PdBdcosθ) | frotorf_{rotor}frotor 为行星轮自转频率(16.21 Hz) |
| 外圈故障 | BPFO≈Nb2×frotor×(1−BdPdcosθ)BPFO \approx \frac{N_b}{2} \times f_{rotor} \times (1 - \frac{B_d}{P_d} \cos\theta)BPFO≈2Nb×frotor×(1−PdBdcosθ) | 外圈固定,故障频率稳定,在频谱中表现为清晰谱线 |
| 滚动体故障 | BSF≈Pd2×Bd×frotor×(1−(BdPdcosθ)2)BSF \approx \frac{P_d}{2 \times B_d} \times f_{rotor} \times (1 - (\frac{B_d}{P_d} \cos\theta)^2)BSF≈2×BdPd×frotor×(1−(PdBdcosθ)2) | |
| 保持架故障 | FTF≈12×frotor×(1−BdPdcosθ)FTF \approx \frac{1}{2} \times f_{rotor} \times (1 - \frac{B_d}{P_d} \cos\theta)FTF≈21×frotor×(1−PdBdcosθ) |
关键点 :即使没有精确几何参数,也应知道行星轮轴承的所有故障频率都以其自转频率(16.21 Hz) 为基频,并被其公转频率(5.73 Hz) 调制。因此,在频谱中寻找以~16.21 Hz及其倍频为间隔的谱线,是诊断行星轮轴承故障的起点。
总结与故障诊断策略
- 定位啮合频率 :首先在频谱中找到1900 Hz (锥齿轮)和568 Hz(行星齿轮)的啮合频率及其谐波。
- 寻找边带 :这是诊断的关键。仔细观察啮合频率谱线两侧是否存在边带 。
- 边带间隔为 100 Hz → 怀疑输入小齿轮。
- 边带间隔为 26.76 Hz → 怀疑锥齿轮 或太阳轮。
- 边带间隔为 21.0 Hz → 怀疑太阳轮局部故障。
- 边带间隔为 22.92 Hz → 怀疑内齿圈或行星轮通过频率。
- 边带间隔为 32.42 Hz → 怀疑行星轮局部故障。
- 低频段分析 :在低频段(< 100 Hz)寻找 5.73 Hz (行星架/行星轮公转)、16.21 Hz (行星轮自转)、21.0 Hz(太阳轮FTF)等频率成分,它们本身的幅值升高也可能预示相应部件的故障。
- 包络谱分析 :对原始振动信号(或经滤波后的信号)进行包络谱分析,能极大地增强对轴承和齿轮局部故障冲击的识别能力,是诊断这类故障最有效的方法之一。