前言
本文主要对智能驾驶机器学习相关知识进行初步探究和总结,以加深理解,及方便后续学习过程中查漏补缺。
机器视觉
相机投影几何
原理
- 原理:小孔成像
坐标系
- 分类:世界坐标系、相机坐标系、图像坐标系、像素坐标系
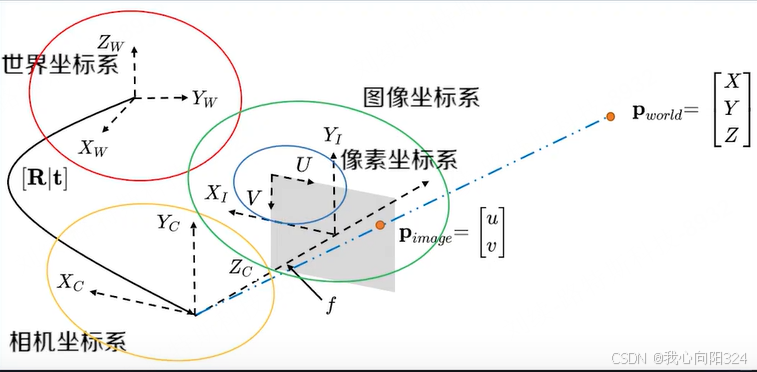
- 转换
- 世界--》相机
- 相机--》图像:内参矩阵K;标定
- 图像--》像素
双目视觉
- 极线约束
视觉特征
- 图像特征:
- 图像中感兴趣点
- 图像特征检测:
- 角点特征、边特征、区块特征
- 特征描述子
- 特征匹配
- 距离函数、穷举匹配
- 二义性、奇异点处理方法
神经网络
前馈神经网络
- 激励函数:ReLU
应用
- 分类、检测、深度估计、语义分割
训练
数据
- 数据=训练集+验证集+测试集
过拟合
- 过拟合:泛化能力差
- 增加训练数据
- 更改模型架构
- 规则化方法
欠拟合
- 欠拟合:训练损失高
- 更长的训练过程
- 增加层数或各层的单元数
- 更改模型架构
卷积神经网络
结构
- 卷积层
- 池化层
应用
目标检测
- 特征提取模块
- 特征提取器:如VGG、ResNet
- 检测框模块
- 非极大抑制
语义分割
- 标记每一个像素
- 应用:道路路面识别