人眼能够看清物体,本质上是光学成像系统与神经信号处理系统协同工作的结果。
其核心原理可分解为以下步骤,结合经典光学成像理论与生物视觉机制进行说明:
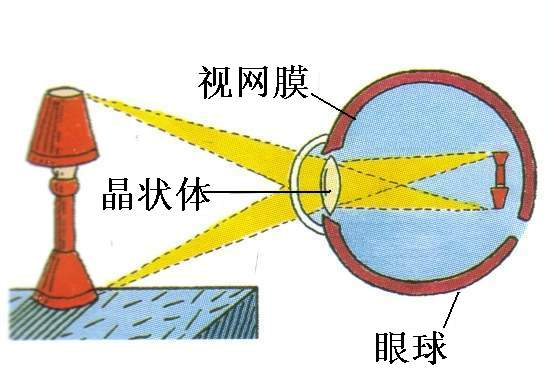
1. 人眼的光学结构:简化版"相机模型"
人眼的光学系统由角膜、晶状体、玻璃体和视网膜构成,其功能与相机类似:
-
角膜 :透明前凸结构,提供约 2/3 的屈光力(类似相机的固定镜头)。
-
晶状体 :弹性透明体,通过睫状肌调节曲率(类似相机的变焦镜头),实现 动态聚焦。
-
玻璃体:透明胶状物质,填充眼球后部,维持眼球形状并传导光线。
-
视网膜:光敏感层,相当于相机的感光元件(CCD/CMOS),将光信号转换为神经信号。
2. 成像过程:从物体到视网膜的点对点映射
(1) 光线收集与折射
-
物体上的点 P 发出或反射的光线进入人眼,依次经过角膜和晶状体的折射。
-
根据薄透镜公式(简化模型):
f1=u1+v1
其中 u 为物距(物体到角膜的距离),v 为像距(角膜到视网膜的距离,约 24mm ),f 为晶状体与角膜的等效焦距。
(2) 动态聚焦(调焦机制)
- 看远处物体:睫状肌松弛,晶状体变扁平,焦距 f 增大,使平行光线聚焦在视网膜上。
- 看近处物体:睫状肌收缩,晶状体变凸,焦距 f 减小,使发散光线重新聚焦在视网膜上。
- 调节能力 :人眼可清晰聚焦的物距范围称为明视距离 (约 25cm 至无穷远),随年龄增长因晶状体弹性下降而缩短(老花眼)。
(3) 视网膜上的倒立实像
-
光线经折射后,在视网膜上形成倒立、缩小的实像(与相机原理一致)。
-
每个物点 P 对应视网膜上的一个感光细胞(视锥细胞或视杆细胞),实现点对点映射。
3. 神经信号处理:从光信号到视觉感知
(1) 感光细胞的光电转换
- 视锥细胞 (约 600-700万 个):
- 集中在视网膜中央的黄斑区(尤其是中央凹)。
- 负责明视觉 和色觉(对红、绿、蓝光敏感)。
- 视杆细胞 (约 1.2亿 个):
- 分布在视网膜周边区域。
- 负责暗视觉(对低光照敏感,但无色觉)。
(2) 信号传递与处理
-
感光细胞将光信号转换为电信号,通过双极细胞 和神经节细胞传递至视神经。
-
视交叉 :部分神经纤维交叉到对侧大脑,形成视皮层的左右眼视觉融合。
-
大脑加工 :视皮层对信号进行空间翻转、颜色校正、边缘增强等处理,最终形成主观的"正立"视觉。
4. 关键因素:成像质量与视觉清晰度
(1) 光学因素
- 屈光正常:角膜和晶状体的屈光力与眼轴长度匹配,使像精准落在视网膜上(否则为近视/远视)。
- 像差校正:角膜的非球面形状和晶状体的动态调节可减少球差、色差等像差。
- 瞳孔调节:通过收缩瞳孔(虹膜控制)减少衍射效应和景深,提高成像锐度。
(2) 生理因素
-
视网膜分辨率 :中央凹的视锥细胞密度极高(约 15万/mm² ),可分辨 1角分 的细节(对应 20/20 视力)。
-
神经适应 :视杆细胞和视锥细胞的协同工作,使人眼能在 10^-6 cd/m² (月光)至 10^6 cd/m²(日光)的宽动态范围内清晰成像。
5. 总结:人眼看清物体的完整链条
- 光线收集:物体反射或发出的光线进入眼内。
- 动态聚焦:角膜和晶状体折射光线,形成倒立实像于视网膜。
- 光电转换:视锥/视杆细胞将光信号转换为神经信号。
- 信号传递:通过视神经和大脑加工,形成主观视觉。
- 自适应调节:通过瞳孔、晶状体和神经系统的协同,优化不同条件下的成像质量。
这一过程体现了光学成像原理与生物系统的高度适配,是人类经过数百万年进化形成的精密视觉机制。