部分函数说明 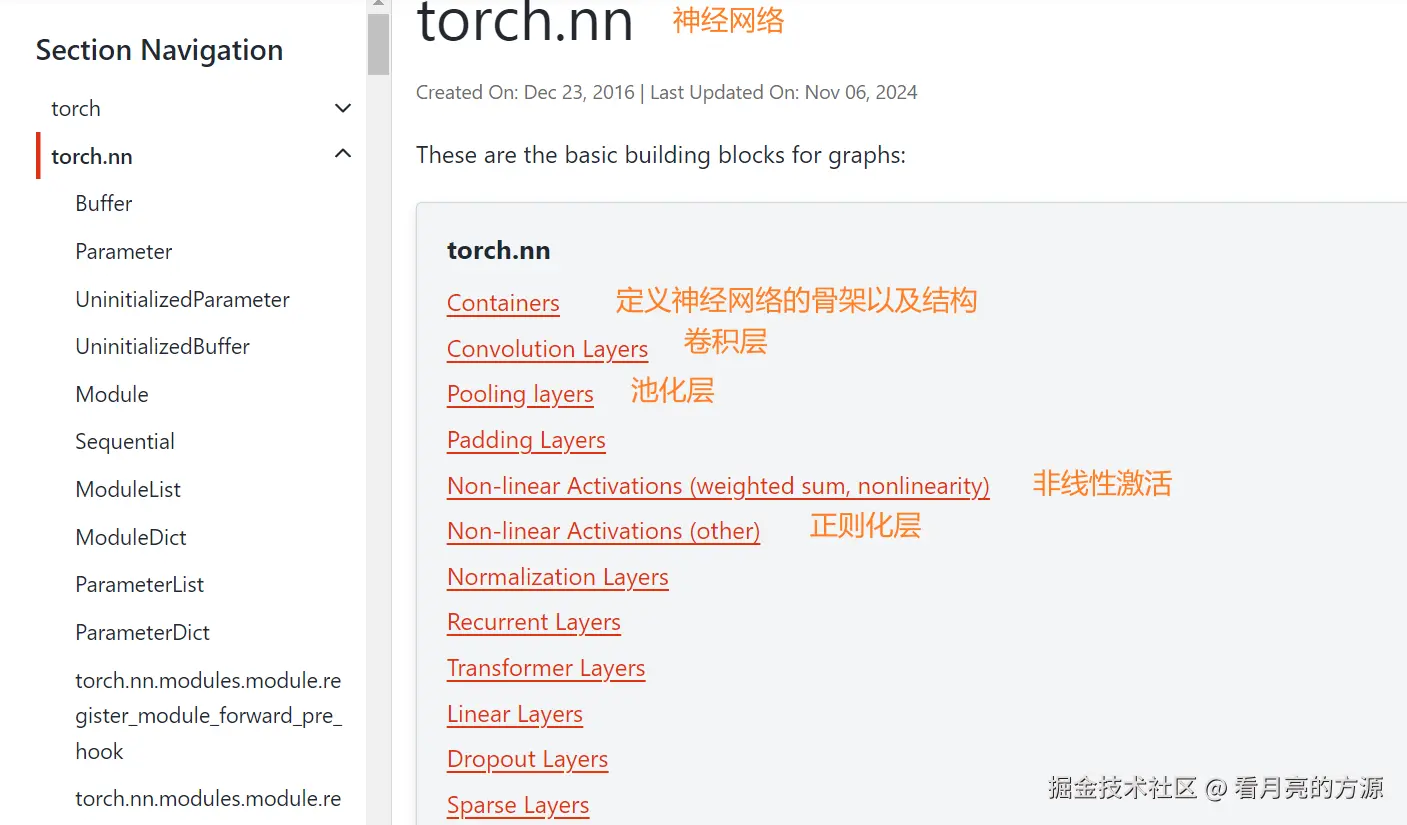
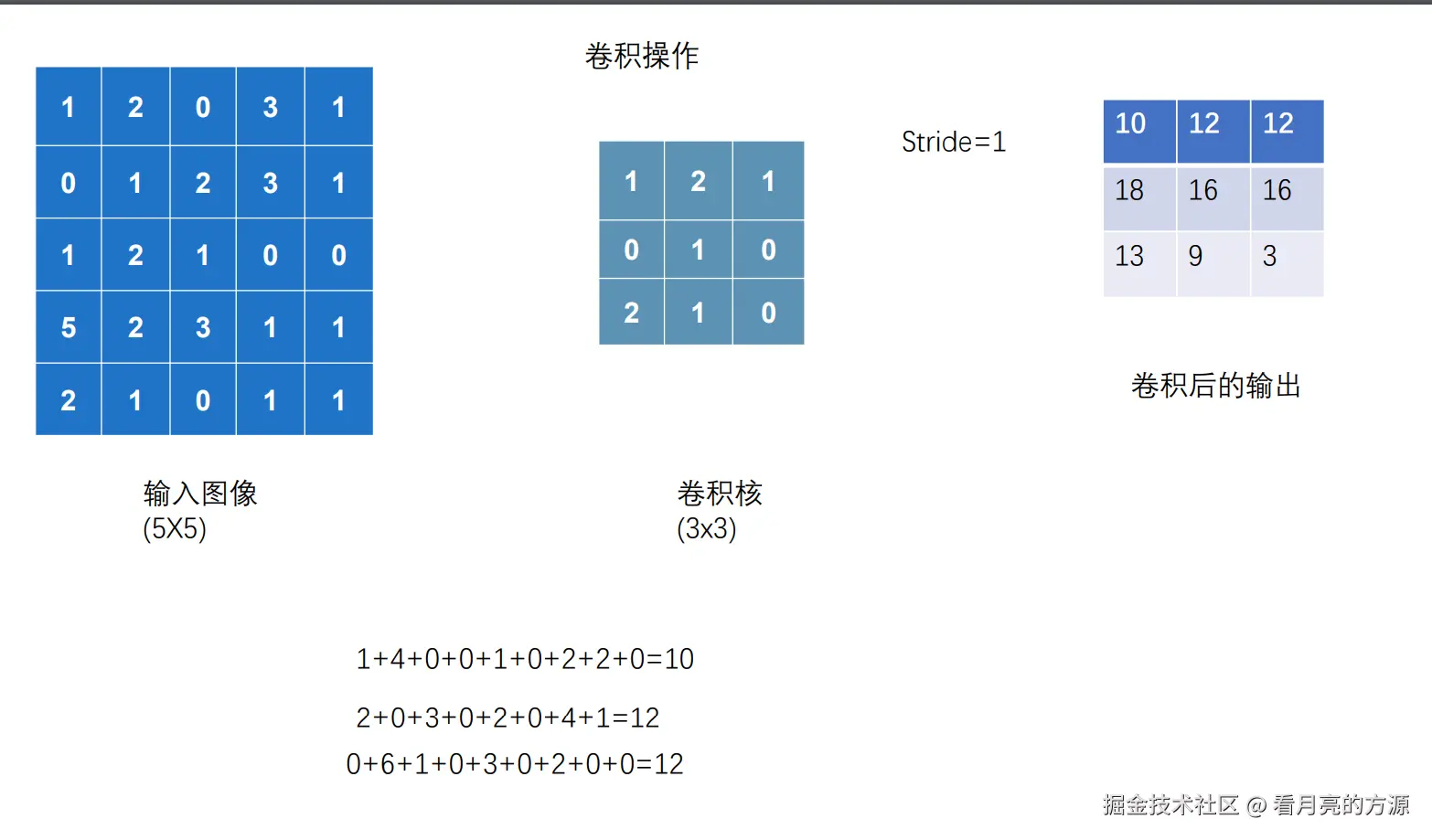
1. 卷积层
- 卷积层的作用
- 提取输入图片中的信息,这些信息被称为图像特征,这些特征是由图像中的每个像素通过组合或者独立的方式所体现,比如图片的纹理特征,颜色特征。
- 这里的卷积操作是通过卷积核对每个通道的矩阵从左到右(卷积核一般是3x3的矩阵)从上至下进行互相关运算(先是从左到右,再是从上至下,所以卷积操作也会保留位置信息),就像一个小的窗口一样,从左上角一步步滑动到右下角,滑动的步长是个超参数,互相关运算的意思就是对应位置相乘再相加,最后把三个通道的值也对应加起来得到一个值。
py
# 导入必要的库
import torch # PyTorch深度学习框架主库
import torchvision # 主要处理图像数据,包含一些常用的数据集、模型、转换函数等
from torch import nn # 神经网络模块
from torch.nn import Conv2d # 二维卷积层
from torch.utils.data import DataLoader # 数据加载器,用于批量加载数据
from torch.utils.tensorboard import SummaryWriter # TensorBoard可视化工具
# 加载CIFAR10数据集
dataset = torchvision.datasets.CIFAR10(
"../data", # 数据集存储路径
train=False, # 使用测试集(而非训练集)
transform=torchvision.transforms.ToTensor(), # 将图像转换为Tensor格式
download=True # 如果数据集不存在则自动下载
)
# 创建数据加载器,用于批量获取数据
dataloader = DataLoader(
dataset, # 使用的数据集
batch_size=64 # 每批加载64个样本
)
# 定义神经网络类
class TuiDui(nn.Module):
def __init__(self):
super(TuiDui, self).__init__() # 调用父类nn.Module的初始化方法
# 定义卷积层
self.conv1 = Conv2d(
in_channels=3, # 输入通道数(RGB图像为3通道)
out_channels=6, # 输出通道数(卷积核数量)
kernel_size=3, # 卷积核大小(3x3)
stride=1, # 卷积步长
padding=0 # 填充大小(无填充)
)
def forward(self, x):
x = self.conv1(x) # 前向传播:对输入x进行卷积操作
return x
# 创建神经网络实例
tudui = TuiDui()
# 创建TensorBoard SummaryWriter对象,用于记录日志
writer = SummaryWriter("./juanlogs")
# 初始化步数计数器
step = 0
# 遍历数据加载器中的每个批次
for data in dataloader:
imgs, targets = data # 解包数据批次为图像和标签
output = tudui(imgs) # 将图像输入网络获取输出
# 记录输入图像到TensorBoard
writer.add_images("input", imgs, step)
# 重塑输出张量形状以便可视化
# 将[64, 6, 30, 30]重塑为[128, 3, 30, 30](因为6个通道可以分成2组3通道图像)
output = torch.reshape(output, (-1, 3, 30, 30))
# 记录输出图像到TensorBoard
writer.add_images("output", output, step)
# 更新步数计数器
step += 12. 池化层的作用
- 池化层的作用是对卷积层中提取的特征进行挑选。主要有以下几个作用:
-
挑选不受位置干扰的图像信息。
-
对特征进行降维,提高后续特征的感受野,也就是让池化后的一个像素对应前面图片中的一个区域。
-
因为池化层是不进行反向传播的,而且池化层减少了特征图的变量个数,所以池化层可以减少计算量。
- 常见的池化操作有最大池化和平均池化,池化层是由n×n大小的矩阵窗口滑动来进行计算的,类似于卷积层,只不过不是做互相关运算,而是求n×n大小的矩阵中的最大值、平均值等。
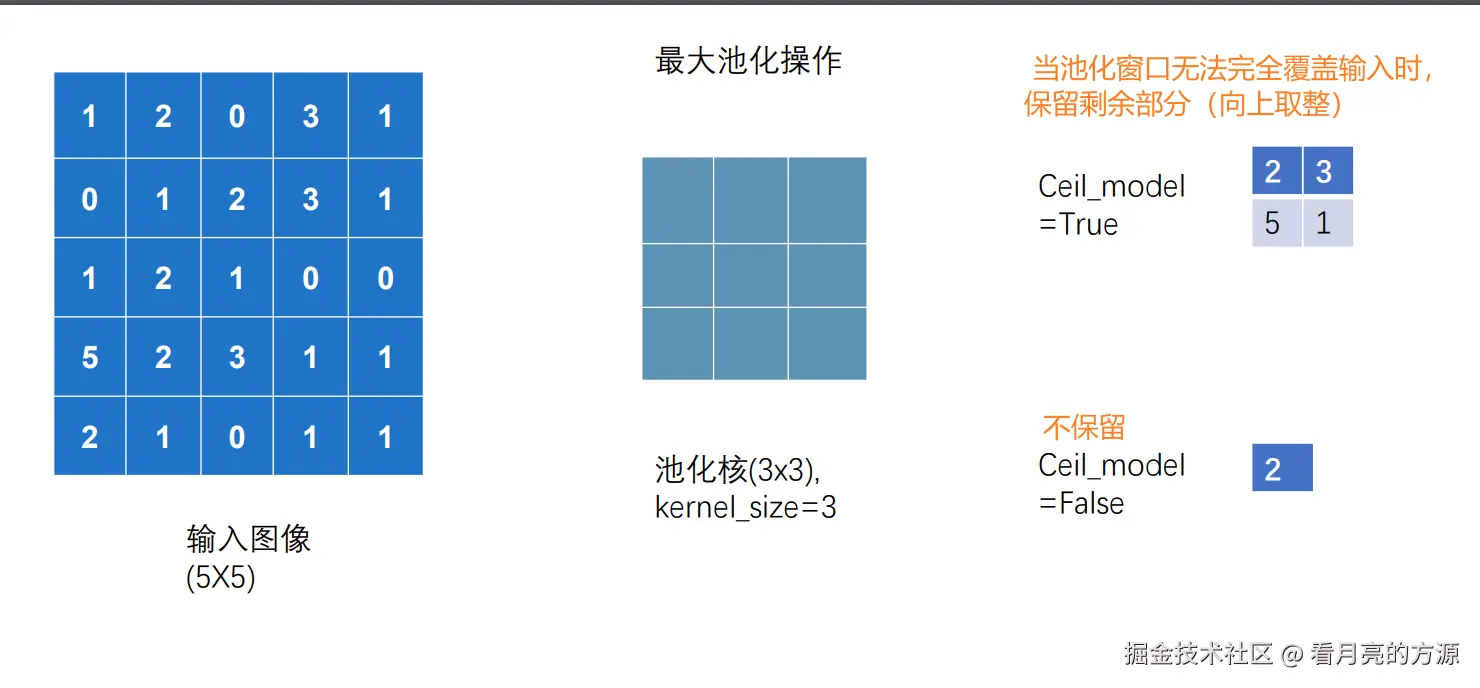
2.1 最大池化的使用
python
# 导入PyTorch深度学习框架
import torch
# 导入torchvision中的数据集模块
import torchvision.datasets
# 从PyTorch中导入神经网络模块
from torch import nn
# 导入数据加载器,用于批量加载数据
from torch.utils.data import DataLoader
# 导入TensorBoard可视化工具
from torch.utils.tensorboard import SummaryWriter
# 加载CIFAR10数据集
dataset = torchvision.datasets.CIFAR10(
root='./data', # 数据集存储的根目录
train=False, # 使用测试集(而不是训练集)
download=True, # 如果数据集不存在则自动下载
# 数据转换:将PIL图像转换为Tensor格式,并自动归一化到[0,1]范围
transform=torchvision.transforms.ToTensor()
)
# 创建数据加载器,用于批量获取数据
dataloader = DataLoader(dataset, batch_size=64) # 每批加载64个样本
# 定义神经网络类
class TuDui(nn.Module):
def __init__(self):
# 调用父类构造函数进行初始化
super(TuDui, self).__init__()
# 定义最大池化层
self.maxpool = nn.MaxPool2d(
kernel_size=3, # 池化窗口大小(3x3)
ceil_mode=True # 当池化窗口无法完全覆盖输入时,保留剩余部分(向上取整)
)
# ceil_mode=True,最大池化,保留输入的特征(即使不能完全被窗口覆盖)
def forward(self, input):
# 前向传播:对输入进行最大池化操作
output = self.maxpool(input)
return output
# 创建神经网络实例
tudui = TuDui()
# 初始化步数计数器
step = 0
# 创建TensorBoard日志写入器,指定日志保存路径
writer = SummaryWriter("./logs_max_pool")
# 遍历数据加载器中的所有批次
for data in dataloader:
# 解包数据,获取图像和对应的标签
imgs, targets = data
# 将输入图像写入TensorBoard
writer.add_images("input", imgs, step)
# 将图像输入网络,获取输出(经过最大池化后的特征图)
output = tudui(imgs)
# 将输出图像写入TensorBoard
writer.add_images("output", output, step)
# 增加步数计数器
step += 1
# 关闭TensorBoard写入器,确保所有数据已写入磁盘
writer.close()保留输入的特征 代码运行后的效果如下: 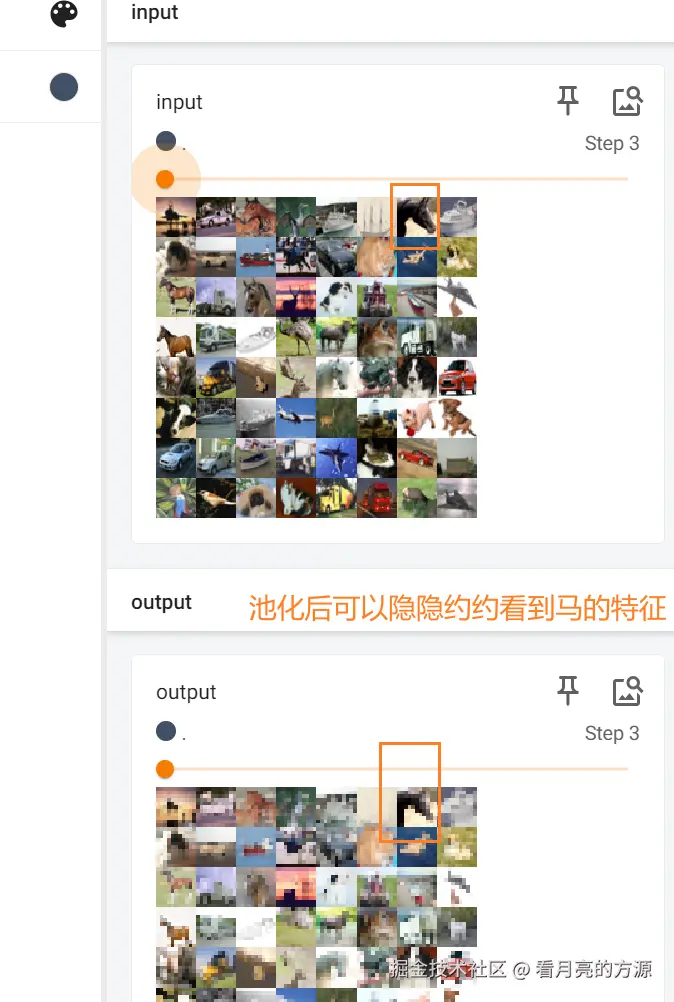
3. 非线性激活
非线性激活,相当于两层神经元之间的关系函数,上层的输出,被激活函数作用得到下层的输入。 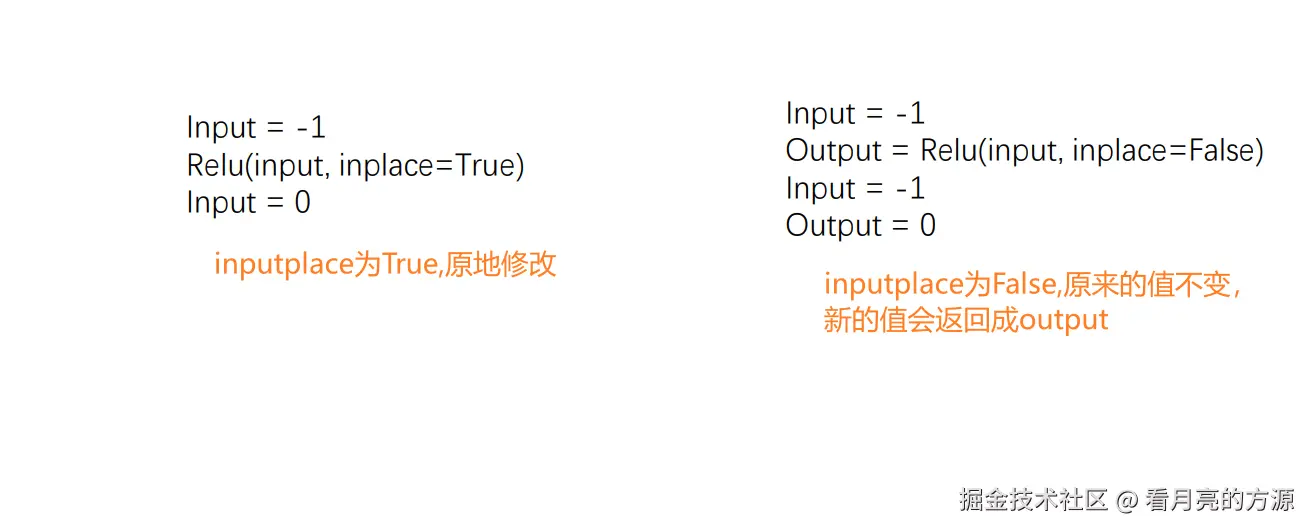
python
# 导入PyTorch深度学习框架
import torch
# 导入TorchVision库,提供计算机视觉相关的数据集和转换
import torchvision.datasets
# 从PyTorch中导入神经网络模块
from torch import nn
# 从神经网络模块中导入ReLU激活函数
from torch.nn import ReLU
# 导入数据加载器,用于批量加载数据
from torch.utils.data import DataLoader
# 导入TensorBoard日志记录工具
from torch.utils.tensorboard import SummaryWriter
# 导入urllib3的文件上传模块(此导入可能多余,因为下面使用的是SummaryWriter)
from urllib3.filepost import writer
# 创建一个2x2的张量,包含4个数值
input = torch.tensor([[1, -0.5],
[-1, 3]])
# 将张量重塑为4维形状,适合作为卷积神经网络的输入
# 形状变为(batch_size=1, channels=1, height=2, width=2)
input = torch.reshape(input, (-1, 1, 2, 2))
# 打印重塑后的张量形状
print(input.shape)
# 加载CIFAR-10数据集
dataset = torchvision.datasets.CIFAR10(root='./data', # 数据集存储路径
train=True, # 加载训练集
download=True, # 如果数据集不存在则下载
# 将PIL图像转换为Tensor,并归一化到[0,1]范围
transform=torchvision.transforms.ToTensor())
# 创建数据加载器,用于批量加载数据
dataloader = DataLoader(dataset, batch_size=64) # 每批加载64个样本
# 定义一个名为TuDui的神经网络类,继承自nn.Module
class TuDui(nn.Module):
# 类的初始化函数
def __init__(self):
# 调用父类的初始化方法
super().__init__()
# 创建一个ReLU激活函数实例(虽然定义了但未在前向传播中使用)
self.relu = ReLU(inplace=False)
# 创建一个Sigmoid激活函数实例
self.sigmoid1 = nn.Sigmoid()
# 定义前向传播过程
def forward(self, input):
# 对输入应用Sigmoid激活函数(将值压缩到0-1范围内)
output = self.sigmoid1(input)
# 返回处理后的输出
return output
# 创建TuDui类的实例
tudui = TuDui()
# 初始化步数计数器,用于TensorBoard记录
step = 0
# 创建SummaryWriter实例,指定日志保存路径
writer = SummaryWriter("./relu_logs")
# 遍历数据加载器中的所有批次
for data in dataloader:
# 解包数据,获取图像和对应的标签
imgs, targets = data
# 将输入图像添加到TensorBoard中,用于可视化
writer.add_images("input", imgs, step)
# 将图像通过神经网络模型进行处理
outputs = tudui(imgs)
# 将处理后的输出图像添加到TensorBoard中,用于可视化
writer.add_images("output", outputs, step)
# 增加步数计数器
step += 1
# 关闭SummaryWriter,确保所有数据都已写入磁盘
writer.close()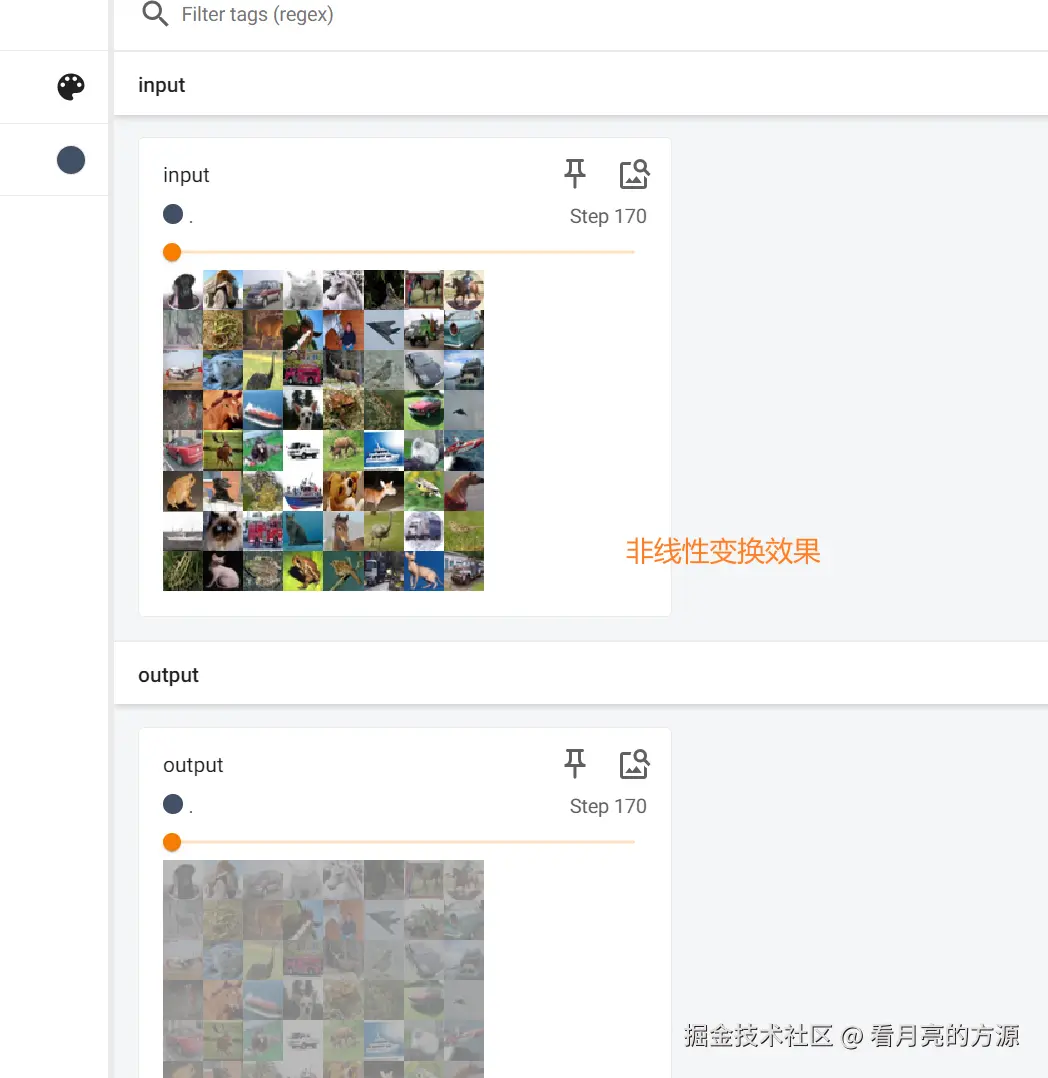
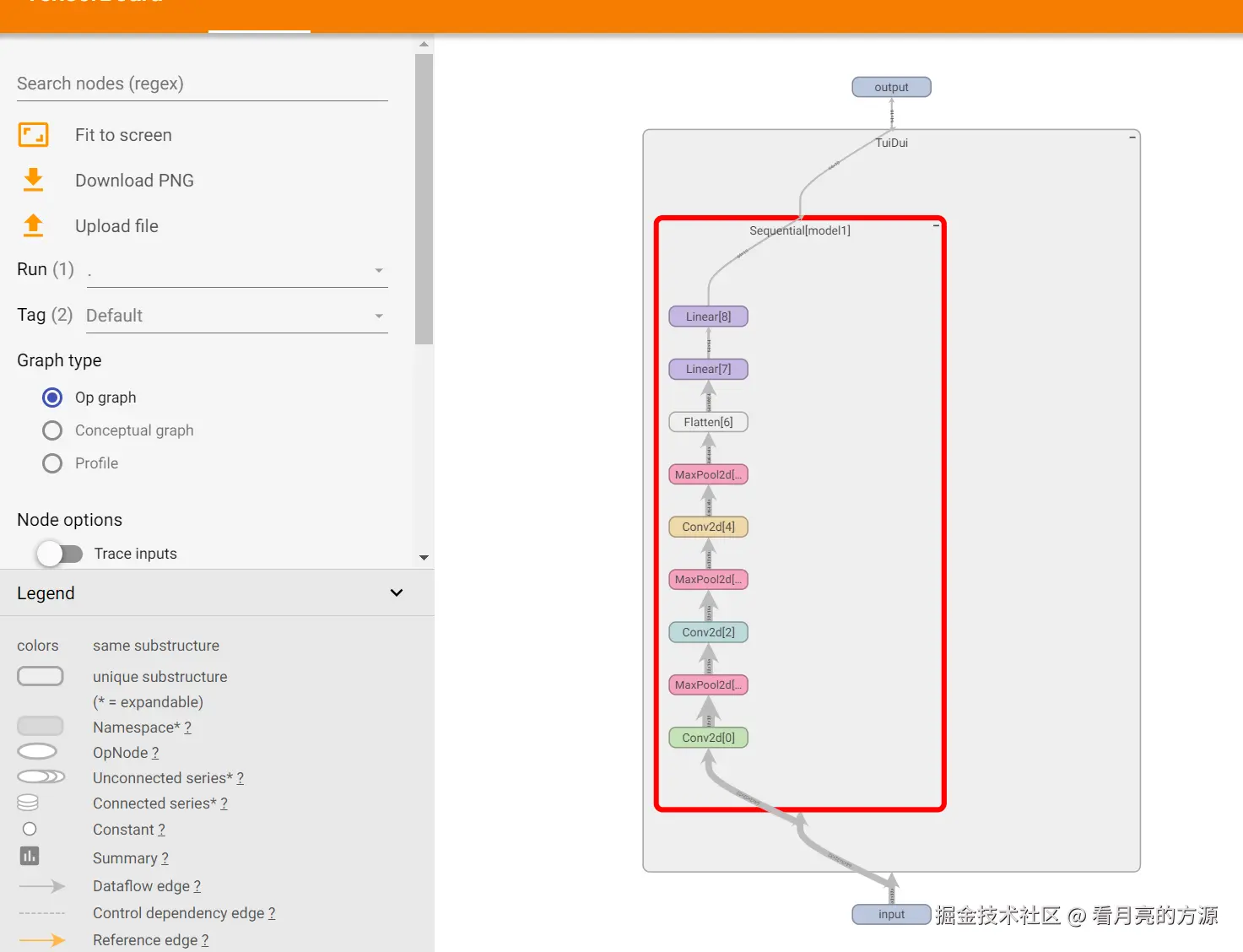
4. 小实战_sequential
python
import torch
from torch import nn
from torch.utils.tensorboard import SummaryWriter
from urllib3.filepost import writer
class TuiDui(nn.Module):
def __init__(self):
super().__init__()
# self.conv1 = nn.Conv2d(3, 32, 5, padding=2)
# self.maxpool = nn.MaxPool2d(2)
# self.conv2 = nn.Conv2d(32, 32, 5, padding=2)
# self.maxpool2 = nn.MaxPool2d(2)
# self.conv3 = nn.Conv2d(32, 64, 5, padding=2)
# self.maxpool3 = nn.MaxPool2d(2)
# self.flatten = nn.Flatten()
# self.linear1 = nn.Linear(1024, 64)
# self.linear2 = nn.Linear(64, 10)
# Sequential 等价于上面的写法
# 使用nn.Sequential顺序容器构建网络模型,替代之前注释掉的逐层定义方式
self.model1 = nn.Sequential(
# 第一个卷积层:输入通道3(RGB图像),输出通道32,卷积核大小5,填充2(保持特征图尺寸)
nn.Conv2d(3, 32, 5, padding=2),
# 最大池化层,池化窗口大小为2(下采样因子为2)
nn.MaxPool2d(2),
# 第二个卷积层:输入通道32,输出通道32,卷积核大小5,填充2
nn.Conv2d(32, 32, 5, padding=2),
# 第二个最大池化层
nn.MaxPool2d(2),
# 第三个卷积层:输入通道32,输出通道64,卷积核大小5,填充2
nn.Conv2d(32, 64, 5, padding=2),
# 第三个最大池化层
nn.MaxPool2d(2),
# 展平层:将多维特征张量转换为一维,便于全连接层处理
nn.Flatten(),
# 第一个全连接层:输入特征数1024(64*4*4=1024),输出64
nn.Linear(1024, 64),
# 第二个全连接层(输出层):输入64,输出10(对应10个类别)
nn.Linear(64, 10)
)
def forward(self, x):
# x = self.conv1(x)
# x = self.maxpool(x)
# x = self.conv2(x)
# x = self.maxpool2(x)
# x = self.conv3(x)
# x = self.maxpool3(x)
# x = self.flatten(x)
# x = self.linear1(x)
# x = self.linear2(x)
x = self.model1(x)
return x
# 创建TuiDui模型实例
tudui = TuiDui()
# 打印模型结构
print(tudui)
# 创建模拟输入数据:批次大小64,3通道,32x32像素的图像(全部初始化为1)
input = torch.ones(64, 3, 32, 32)
# 将输入数据通过模型前向传播得到输出
output = tudui(input)
# 打印输出张量的形状
print(output.shape)
# 创建TensorBoard的SummaryWriter对象,日志保存到"./log_seq"目录
writer = SummaryWriter("./log_seq")
# 将模型结构和示例输入添加到TensorBoard日志
writer.add_graph(tudui, input)
# 关闭SummaryWriter
writer.close()效果如图所示
5. 损失函数
python
# 导入PyTorch深度学习框架
import torch
# 从PyTorch的神经网络模块中导入L1Loss(平均绝对误差损失)
from torch.nn import L1Loss
# 导入PyTorch的神经网络模块
from torch import nn
# 创建输入张量,包含数值1, 2, 3,并指定数据类型为浮点型
inputs = torch.tensor([1, 2, 3], dtype=torch.float)
# 创建目标张量,包含数值1, 2, 5,并指定数据类型为浮点型
targets = torch.tensor([1, 2, 5], dtype=torch.float)
# 将输入张量从形状[3]重塑为[1, 1, 1, 3]
# 这增加了批次、通道等维度,使其符合深度学习模型的输入格式要求
inputs = torch.reshape(inputs, (1, 1, 1, 3))
# 同样重塑目标张量的形状,使其与输入张量形状一致
targets = torch.reshape(targets, (1, 1, 1, 3))
# 创建L1损失函数实例,设置reduction参数为'sum'表示计算所有元素的绝对误差之和
loss = L1Loss(reduction='sum')
# 计算输入和目标之间的L1损失
result = loss(inputs, targets)
# 创建均方误差(MSE)损失函数实例
loss_me = nn.MSELoss()
# 计算输入和目标之间的均方误差损失
result_mse = loss_me(inputs, targets)
# 打印L1损失结果
print(result)
# 打印均方误差损失结果
print(result_mse)代码作用说明
这段代码演示了PyTorch中两种常见损失函数的计算:
-
L1损失(平均绝对误差):计算预测值与目标值之间绝对差异的总和
- 输入值:1, 2, 3
- 目标值:1, 2, 5
- 绝对误差:|1-1| + |2-2| + |3-5| = 0 + 0 + 2 = 2
-
MSE损失(均方误差):计算预测值与目标值之间平方差异的平均值
- 输入值:1, 2, 3
- 目标值:1, 2, 5
- 平方误差:(1-1)² + (2-2)² + (3-5)² = 0 + 0 + 4 = 4
- 平均值:4 / 3 ≈ 1.333
6.前向传播和反向传播(梯度计算)
python
# 导入PyTorch计算机视觉库
import torchvision
# 导入PyTorch神经网络模块
from torch import nn
# 导入数据加载器,用于批量加载数据
from torch.utils.data import DataLoader
# 加载CIFAR-10数据集
dataset = torchvision.datasets.CIFAR10(
"./data", # 数据集存储路径
train=False, # 使用测试集(非训练集)
transform=torchvision.transforms.ToTensor(), # 将图像转换为Tensor格式
download=True # 如果数据集不存在则自动下载
)
# 创建数据加载器,设置批量大小为64
dataloader = DataLoader(dataset, batch_size=64)
# 定义神经网络模型类
class TuiDui(nn.Module):
def __init__(self):
# 调用父类构造函数
super().__init__()
# 使用nn.Sequential顺序容器构建网络模型
self.model1 = nn.Sequential(
# 第一个卷积层:输入通道3(RGB图像),输出通道32,卷积核大小5,填充2(保持特征图尺寸)
nn.Conv2d(3, 32, 5, padding=2),
# 最大池化层,池化窗口大小为2(下采样因子为2)
nn.MaxPool2d(2),
# 第二个卷积层:输入通道32,输出通道32,卷积核大小5,填充2
nn.Conv2d(32, 32, 5, padding=2),
# 第二个最大池化层
nn.MaxPool2d(2),
# 第三个卷积层:输入通道32,输出通道64,卷积核大小5,填充2
nn.Conv2d(32, 64, 5, padding=2),
# 第三个最大池化层
nn.MaxPool2d(2),
# 展平层:将多维特征张量转换为一维,便于全连接层处理
nn.Flatten(),
# 第一个全连接层:输入特征数1024(64*4*4=1024),输出64
nn.Linear(1024, 64),
# 第二个全连接层(输出层):输入64,输出10(对应CIFAR-10的10个类别)
nn.Linear(64, 10)
)
# 定义前向传播过程
def forward(self, x):
x = self.model1(x)
return x
# 实例化神经网络模型
tudui = TuiDui()
# 定义交叉熵损失函数,适用于多分类问题
loss = nn.CrossEntropyLoss()
# 遍历数据加载器中的每个批次
for data in dataloader:
# 解包数据,获取图像和对应的标签
imgs, targets = data
# 将图像输入网络,获取预测输出
outputs = tudui(imgs)
# 计算预测输出与真实标签之间的损失
result_loss = loss(outputs, targets)
# 反向传播,计算梯度
result_loss.backward()
# 打印提示信息,表示一次前向传播和反向传播完成
print("ok")代码功能说明
这段代码实现了一个完整的深度学习训练流程,主要功能包括:
-
数据准备:
- 加载CIFAR-10数据集(10个类别的彩色图像数据集)
- 将图像转换为PyTorch Tensor格式
- 创建数据加载器,实现批量数据加载
-
神经网络模型定义:
- 创建了一个名为"TuiDui"的卷积神经网络
- 网络结构包含3个卷积层和2个全连接层
- 使用最大池化层进行下采样
- 最终输出10个节点,对应CIFAR-10的10个类别
-
训练流程:
- 实例化模型和损失函数
- 遍历数据集中的每个批次
- 执行前向传播计算预测值
- 计算损失值
- 执行反向传播计算梯度
需要注意的是,这段代码只完成了前向传播和反向传播(梯度计算),但没有包含优化器步骤(权重更新),因此实际上并没有进行模型训练,只是演示了训练流程的前半部分。要完成完整的训练,还需要添加优化器和权重更新步骤。
7. 优化器
ps: 没搞明白,二刷的时候,再解决这个问题
python
import torch
import torchvision
# 导入PyTorch神经网络模块
from torch import nn
# 导入数据加载器,用于批量加载数据
from torch.utils.data import DataLoader
# 加载CIFAR-10数据集
dataset = torchvision.datasets.CIFAR10(
"./data", # 数据集存储路径
train=False, # 使用测试集(非训练集)
transform=torchvision.transforms.ToTensor(), # 将图像转换为Tensor格式
download=True # 如果数据集不存在则自动下载
)
# 创建数据加载器,设置批量大小为64
dataloader = DataLoader(dataset, batch_size=64)
# 定义神经网络模型类
class TuiDui(nn.Module):
def __init__(self):
# 调用父类构造函数
super().__init__()
# 使用nn.Sequential顺序容器构建网络模型
self.model1 = nn.Sequential(
# 第一个卷积层:输入通道3(RGB图像),输出通道32,卷积核大小5,填充2(保持特征图尺寸)
nn.Conv2d(3, 32, 5, padding=2),
# 最大池化层,池化窗口大小为2(下采样因子为2)
nn.MaxPool2d(2),
# 第二个卷积层:输入通道32,输出通道32,卷积核大小5,填充2
nn.Conv2d(32, 32, 5, padding=2),
# 第二个最大池化层
nn.MaxPool2d(2),
# 第三个卷积层:输入通道32,输出通道64,卷积核大小5,填充2
nn.Conv2d(32, 64, 5, padding=2),
# 第三个最大池化层
nn.MaxPool2d(2),
# 展平层:将多维特征张量转换为一维,便于全连接层处理
nn.Flatten(),
# 第一个全连接层:输入特征数1024(64*4*4=1024),输出64
nn.Linear(1024, 64),
# 第二个全连接层(输出层):输入64,输出10(对应CIFAR-10的10个类别)
nn.Linear(64, 10)
)
# 定义前向传播过程
def forward(self, x):
x = self.model1(x)
return x
# 定义交叉熵损失函数,适用于多分类问题
loss = nn.CrossEntropyLoss()
# 实例化神经网络模型
tudui = TuiDui()
# 定义优化器
optim = torch.optim.SGD(tudui.parameters(), lr=0.01)
# 遍历数据加载器中的每个批次
for data in dataloader:
# 解包数据,获取图像和对应的标签
imgs, targets = data
# 将图像输入网络,获取预测输出
outputs = tudui(imgs)
# 计算预测输出与真实标签之间的损失
result_loss = loss(outputs, targets)
# 优化器梯度清零
optim.zero_grad()
# 调用损失函数 反向传播,计算梯度
result_loss.backward()
# 对每个模型的参数进行调优
optim.step()8. 网络模型的保存与读取
网络模型的保存
python
# 导入PyTorch深度学习框架
import torch
# 导入torchvision计算机视觉库,包含常用模型、数据集和图像处理工具
import torchvision
# 创建一个VGG16模型实例,不加载预训练权重
# weights=None 表示使用随机初始化的权重,而不是预训练权重
# 这通常用于从头开始训练模型或加载自定义训练的权重
vgg16 = torchvision.models.vgg16(weights=None)
# 模型保存方式一:保存完整的模型(包括模型结构和所有参数)
# 这种方式会保存整个模型对象,包括网络架构和权重
# 优点是加载方便,直接使用torch.load()即可
# 缺点是文件较大,且可能与特定PyTorch版本绑定
torch.save(vgg16, 'vgg16_method1.pth')
# 模型保存方式二:只保存模型参数(官方推荐方式)
# vgg16.state_dict()返回一个包含模型所有参数的字典
# 这种方式只保存模型的权重,不保存网络结构
# 优点是文件较小,更加灵活,可以跨版本使用
# 缺点是加载时需要先创建模型结构,再加载参数
torch.save(vgg16.state_dict(), 'vgg16_method2.pth')功能说明
保存PyTorch模型的方法:
-
方式一:保存完整模型
- 使用
torch.save(model, path)保存整个模型对象 - 包含模型结构和所有参数
- 加载时直接使用
model = torch.load(path)
- 使用
-
方式二:只保存模型参数(官方推荐)
- 使用
model.state_dict()获取模型参数字典 - 使用
torch.save(model.state_dict(), path)只保存参数 - 加载时需要先创建模型结构,再使用
model.load_state_dict(torch.load(path))
- 使用
第二种方式是PyTorch官方推荐的,因为它更加灵活且文件更小,同时减少了与特定PyTorch版本的依赖关系。
网络模型的读取
python
import torch # 导入PyTorch深度学习框架
import torchvision # 导入torchvision计算机视觉库
from torchvision.models import VGG16_Weights # 导入VGG16预训练权重
# 方式一:直接加载整个模型(包括模型结构和参数)
# 功能:从文件加载完整的模型,包含网络结构和训练好的权重
model = torch.load('vgg16_method1.pth', weights_only=False)
# 参数说明:
# 'vgg16_method1.pth' - 模型文件路径
# weights_only=False - 允许加载包含完整模型而不仅仅是权重的文件
# 方式二:分别加载模型结构和权重
# 功能:创建一个VGG16模型实例,不加载预训练权重(weights=None)
vgg16 = torchvision.models.vgg16(weights=None)
# 功能:加载仅包含模型权重的文件,并将其加载到模型结构中
vgg16.load_state_dict(torch.load('vgg16_method2.pth', weights_only=False))
# 参数说明:
# 'vgg16_method2.pth' - 仅包含模型状态字典(权重)的文件
# weights_only=False - 允许加载包含完整模型而不仅仅是权重的文件
# 功能:打印模型结构,显示所有层和参数
print(vgg16)功能说明
这段代码展示了两种加载预训练VGG16模型的方法:
-
方式一:直接加载完整模型
- 使用
torch.load()直接加载包含模型结构和参数的文件 - 适用于保存时使用了
torch.save(model, path)的情况
- 使用
-
方式二:分别加载模型结构和参数
- 先创建模型结构实例,然后加载仅包含参数的状态字典
- 适用于保存时使用了
torch.save(model.state_dict(), path)的情况 - 这种方式更灵活,可以在加载权重前修改模型结构
两种方法的主要区别在于模型文件的保存方式,方式一保存完整模型,方式二只保存模型参数。
9. 完整模型训练的套路
python
import torch
import torchvision # PyTorch的计算机视觉库,提供数据集、模型架构和图像转换工具
# 导入数据加载工具和TensorBoard可视化工具
from torch.utils.data import DataLoader # 用于批量加载数据
from torch.utils.tensorboard import SummaryWriter # 用于训练过程可视化
# 导入自定义模型(假设存在model.py文件,其中包含模型定义)
from model import *
# 准备训练数据集(CIFAR-10)
train_data = torchvision.datasets.CIFAR10(
root='./data', # 数据集存储路径
train=True, # 加载训练集
transform=torchvision.transforms.ToTensor(), # 将PIL图像转换为PyTorch Tensor格式,并归一化到[0,1]
download=True # 如果本地不存在则自动下载
)
# 准备测试数据集
test_data = torchvision.datasets.CIFAR10(
root='./data',
train=False, # 加载测试集
transform=torchvision.transforms.ToTensor(),
download=True
)
# 获取数据集尺寸
train_data_size = len(train_data) # 训练集样本数量(50000)
test_data_size = len(test_data) # 测试集样本数量(10000)
# 创建数据加载器(自动分批、打乱数据)
train_dataloader = DataLoader(train_data, batch_size=64) # 每批64张图片,默认会打乱数据
test_dataloader = DataLoader(test_data, batch_size=64) # 测试集不需要打乱
# 初始化自定义神经网络模型(假设model.py中存在TuiDui类)
tudui = TuiDui()
# 定义损失函数(交叉熵损失,适用于多分类问题)
loss_fn = nn.CrossEntropyLoss()
# 配置优化器(随机梯度下降)
learning_rate = 0.01
optimizer = torch.optim.SGD(tudui.parameters(), lr=learning_rate) # 使用SGD优化器,传入模型参数和学习率
# 初始化训练参数
total_train_step = 0 # 记录训练总步数(每个batch算一步)
total_test_step = 0 # 记录测试总次数(每个epoch测试一次)
epoch = 10 # 训练轮数
# 初始化TensorBoard日志记录器
writer = SummaryWriter(log_dir='./logs_train') # 创建SummaryWriter对象,指定日志保存路径
# 开始训练循环
for i in range(epoch):
print(f"----第{i + 1}轮训练开始---")
# 训练阶段
tudui.train() # 设置模型为训练模式(启用dropout和batch normalization)
for data in train_dataloader:
imgs, targets = data # 获取批量图像和对应标签
outputs = tudui(imgs) # 前向传播,计算模型输出
loss = loss_fn(outputs, targets) # 计算损失值
# 反向传播优化
optimizer.zero_grad() # 清零梯度,防止梯度累积
loss.backward() # 反向传播,计算梯度
optimizer.step() # 更新模型参数
# 记录训练信息
total_train_step += 1
if total_train_step % 100 == 0: # 每100步输出一次日志
print("训练次数:{},loss:{}".format(total_train_step, loss.item()))
writer.add_scalar('train_loss', loss.item(), total_train_step) # 记录训练损失到TensorBoard
# 测试阶段
tudui.eval() # 设置模型为评估模式(禁用dropout和batch normalization)
total_test_loss = 0 # 累计测试损失
total_accuracy = 0 # 累计正确预测的数量
with torch.no_grad(): # 关闭梯度计算,节省内存和计算资源
for data in test_dataloader:
imgs, targets = data
outputs = tudui(imgs)
loss = loss_fn(outputs, targets)
total_test_loss += loss.item() # 累加测试损失
# 计算准确率:找出输出中最大概率的类别,与真实标签比较
accuracy = (outputs.argmax(1) == targets).sum() # 计算当前batch中正确预测的数量
total_accuracy += accuracy.item() # 累加正确预测的数量
# 记录测试结果
print("整体测试集上的loss:{}".format(total_test_loss))
print("整体测试集上的正确率:{}".format(total_accuracy / test_data_size)) # 计算整体准确率
writer.add_scalar('test_loss', total_test_loss, total_test_step) # 记录测试损失到TensorBoard
writer.add_scalar('test_accuracy', total_accuracy / test_data_size, total_test_step) # 记录测试准确率到TensorBoard
total_test_step += 1
# 保存模型 checkpoint
torch.save(tudui, 'tudui_{}.pth'.format(i)) # 保存整个模型(包括结构和参数)
# 模型保存方式二(注释掉的代码)
# torch.save(tudui.state_dict(), 'tudui_{}.pth'.format(i)) # 只保存模型参数(更轻量)
print("模型已保存")
# 关闭TensorBoard记录器
writer.close()主要功能说明:
-
数据准备与加载: 使用CIFAR-10数据集(10个类别的60,000张32x32彩色图像), 自动下载数据集并转换为PyTorch Tensor格式, 创建数据加载器实现批量处理(每批64张图像)。
-
模型训练: 使用自定义神经网络模型(TuiDui类), 采用交叉熵损失函数和随机梯度下降优化器, 进行10轮训练,每轮包含完整训练集和测试集处理。
-
模型评估 :每轮训练后在测试集上评估模型性能,计算测试损失和准确率,使用
model.train()和model.eval()正确设置模型模式。 -
可视化与日志记录:使用TensorBoard记录训练损失、测试损失和测试准确率, 每100个训练步骤记录一次训练损失, 每轮训练后记录测试指标。
-
模型保存: 每轮训练后保存模型检查点, 提供了两种保存方式:完整模型和仅参数。
PS:学的似懂非懂,有问题的地方,二刷的时候,再来修改。