一.独立按键设置
cs
#include "key.h"
void init_key(void)
{
P1 |= (0x0F << 4);
}
int key_pressed(void)
{
static int ret = 0;
if((P1 & (1 << 4)) == 0)
{
ret = 1;
}
else if((P1 & (1 << 5)) == 0)
{
ret = 2;
}
else if((P1 & (1 << 6)) == 0)
{
ret = 3;
}
else if((P1 & (1 << 7)) == 0)
{
ret = 4;
}
else
{
ret = 0;
}
return ret;
}二.外部中断
1.终端流程
2.代码编写
cs
#include <reg52.h>
#include "delay.h"
#include "digtub.h"
void init_enit(void)
{
IE |= (1<<7)|(1<<0)|(1<<2);
TCON |= (1<<0)|(1<<2);
TCON &= ~(1<<0);
P3 |= (1<<2)|(1<<3);
}
int num = 0;
void enit0_hander(void) interrupt 0
{
++num;
if(num > 9999)
{
num = 0;
}
}
void enit1_hander(void) interrupt 2
{
--num;
if(num < 0)
{
num = 9999;
}
}
int main(void)
{
init_enit();
while(1)
{
show_number(num);
}
}三.定时器
51单片机的定时器(如T0、TI)本质是可编程的16位计数器,核心功能是"计数"或"定时",原理基于"晶休振荡器提供的固定时钟信号"
核心原理拆解:
1.时钟来源
定时器的计数脉冲来自两个选择:
定时模式:脉冲来自单片机内部时钟 (由外部晶振分频得到),如晶振11.0592MHz时,内部时钟频率为11.0592MHz / 12 = 921.6kHz, 即每个计数脉冲的周期约1.08545(定时的最小单位))
计数模式:脉冲来自外部引脚(TO 对应P3.4、TI对应P3.5),引脚每发生一次电平跳变(下降沿),计数器加|(用于统计外部事件次数,如脉冲数),
2.计数器结构
定时器由两个8位寄存器(高8位THx、低8位TLx)组成16位计数器(x=0或1,对应TOTI),计数范围是0000H ~ FFFFH (共65536个计数单位)。
3.工作流程(以定时模式为例)
1.初始化:通过 TMOD寄存器设置定时器模式(如定时模式、16位自动重装),通过THx和TLX设置初始计数value(如要定时Ims,计算初始值后写入);
2.启动:设置TRx=1(TO的TRO、TI 的TRI),定时器开始以固定时钟脉冲计数,每来一个脉冲,TLx加1,TLx溢出时向THx进位,THx溢出时(计数器从初始值到FFFFH);
3.中断触发:计数器溢出后,自动置位"温出标志位"(TFx=1),若此时中断允许(ETx=1、EA=1),则触发定时器中断,CPU暂停主程序执行中断服务函数;
4.重装(可选):若设置为"自动重装模式"(如TMOD的M1 =1,M0=0),溢出后THx和TLx会自动恢复为初始值,无需在中断服务函数中手动重置,可实现周期性定时,
示例:11.0592MHz晶振下定时Ims
内部时钟周期:12 / 11059200Hz 1.085μs;
Ims所需计数次数:1000μs /1.085μS 元921;
16位计数器最大值65536,因此初始值:
65536 - 921 = 64615,转换为十六进制是FC67H,即THO=OxFC、TLO=0x67.
6、什么是PWM?
(1) PWM(脉冲宽度调制,Pulse Width
Modulation)
PWM是一种通过改变"脉冲信号的高电平时间
占比"来模拟模拟信号的技术,
比如:LED调光(高电平占比高则灯亮,占比
低则灯暗)、电机调速(占比高则转速快)
----核心是"用数字脉冲的'占比'替代连续的模拟电压",避免了模拟电路的精度问题,且易于单片机控制,
2.51单片机代码实现
cs
#include <reg52.h>
#include "key.h"
#define Hz200 63035
#define Hz400 64285
#define Hz800 64910
#define Hz2000 65285
unsigned int n = Hz200;
void init_timer0(void)
{
TMOD &= ~(3<<2);
TMOD &= ~(3<<0);
TMOD |= (1<<0);
TH0 = n >> 8;
TL0 = n;
//TCON |= (1<<4);
IE |= (1<<7)|(1<<1);
}
/*void timer0_hander(void) interrupt 1
{
static int t;
++t;
if(t >= 500)
{
P2 ^= 0xFF;
t = 0;
}
TH0 = 64535 >> 8;
TL0 = 64535;
} */
void timer1_hander(void) interrupt 1
{
P2 ^= (1<<1);
TH0 = n >> 8;
TL0 = n;
}
int main(void)
{
init_timer0();
init_key();
while(1)
{
int ret;
ret = key_pressed();
if(ret == 0)
{
TCON &= ~(1<<4);
}
if(ret == 1)
{
n = Hz200;
TCON |= (1<<4);
}
if(ret == 2)
{
n = Hz400;
TCON |= (1<<4);
}
if(ret == 3)
{
n = Hz800;
TCON |= (1<<4);
}
if(ret == 4)
{
n = Hz2000;
TCON |= (1<<4);
}
}
return 0;
}四.重点概念
1.中断:
当中央处理机CPU正在处理某件事的时候外界发生了紧急事件请求,要求CPU暂停当前的工作,转而去处理这个紧急事件,处理完成以后,再回到原来被中断的地方,继续原来的工作,这样的过程称为中断。
中断源:
实现中断功能的部件称为中断系统,请示CPU中断的请求源称为中断源。微型机的中断系统一般允许多个中断源,当几个中断源同时向CPU请求中断,要求为它服务的时候,这就存在CPU优先响应哪一个中断源请求的问题。通常根据中断源的轻重缓急排队,优先处理最紧急事件的中断请求源,即规定每一个中断源有一个优先级别。CPU总是先响应优先级别最高的中断请求。
中断处理流程:
(1).中断源发出中断请求:
中断源通过特定信号,向 CPU 或内核发起 "需要即时处理" 的请求,触发中断流程。
(2).内核检查是否响应相应中断以及该中断是否被屏蔽:
内核通过查询中断控制器的配置,判断两要素:一是该中断是否在 "可响应中断列表" 内;二是该中断是否被 "中断屏蔽字" 禁用。
(3).内核会检查中断的中断优先级:
内核读取中断对应的优先级标识,判断其优先级是否高于当前正在执行任务的优先级 ------ 仅高优先级中断可 "抢占" 当前任务,低优先级则排队等待。
(4).保护现场:
内核将当前 CPU 寄存器的数值、当前任务的上下文保存至指定存储区,确保后续恢复后能回到中断前的执行状态。
(5).执行中断服务函数;
内核跳转到该中断对应的 "中断服务程序" 入口,执行预设的处理逻辑,这是中断的核心处理环节。
(6).恢复现场;
从存储区中取出步骤 4 保存的寄存器值和任务上下文,恢复 CPU 状态,让系统回到中断发生前的执行点,继续运行被中断的任务
3.中断嵌套:
当CPU正在处理一个中断源请求的时候(即执行相应的中断服务程序),发生了另外一个优先级比它还高的中断源请求。如果CPU能够暂停对原来中断源的服务程序,转而去处理优先级更高的中断请求源,处理完以后,再回到原低级中断服务程序,这样的过程称为中断嵌套。
4.中断向量表:
中断向量表是存储于内存固定地址的核心数据结构,其本质是建立 "中断号(唯一中断标识)" 与 "中断服务程序(ISR)入口地址" 的一一映射,为 CPU / 内核提供中断响应时快速定位服务程序的 "索引表",是中断机制高效寻址的基础。
5.51单片机的定时器工作原理:
51 单片机定时器本质是可编程减计数 / 加计数硬件模块,核心基于内部晶振分频后的时钟脉冲驱动,通过预设计数初值、配置工作模式,实现定时(按时间间隔触发)或计数(对外部脉冲计数)功能,溢出时可触发中断或输出信号。
6.PWM:
定义:
PWM(Pulse Width Modulation,脉冲宽度调制)是一种通过周期性输出高低电平脉冲信号,以调节高电平(有效电平)在一个周期内占比,从而等效控制输出 "平均电压 / 功率" 的数字信号调制技术。其核心是利用数字电路的离散电平,模拟出连续的模拟量输出效果,广泛应用于电机调速、灯光调光、电源稳压等场景。
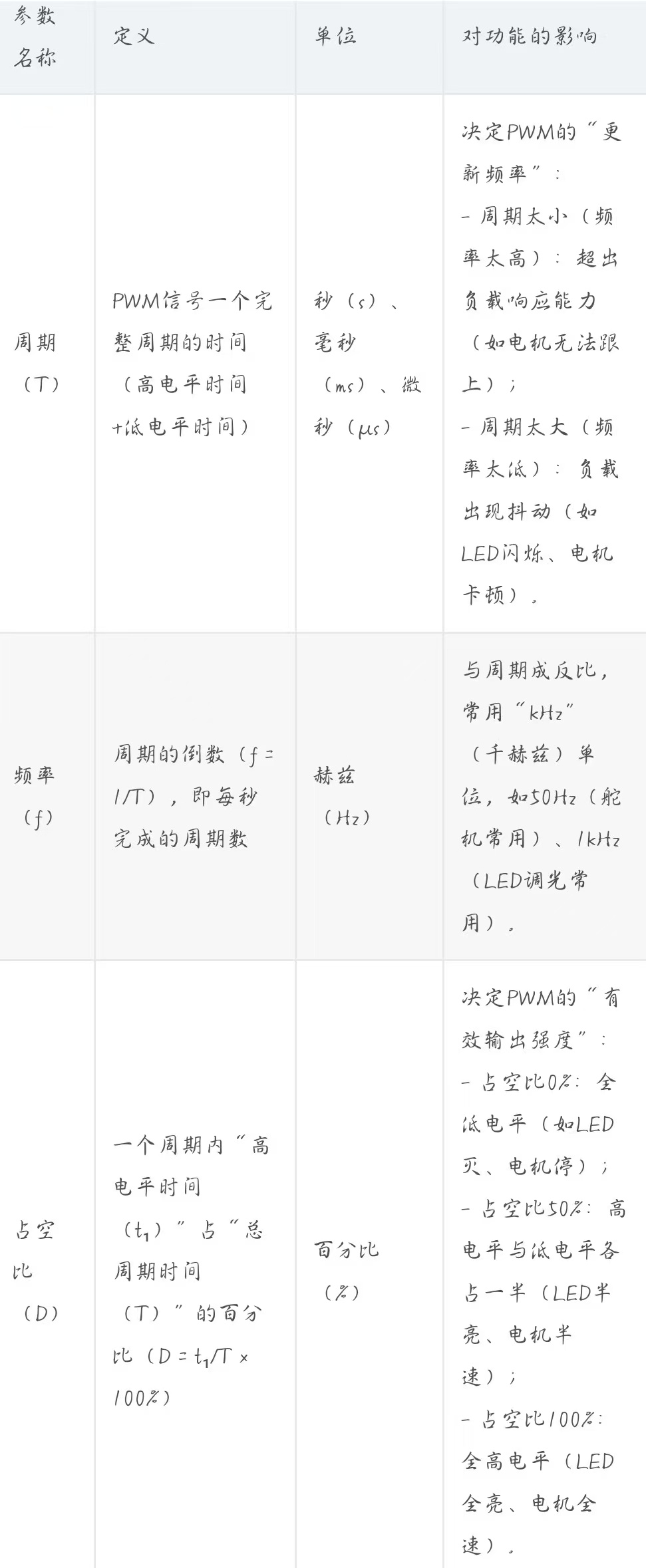
核心参数:
周期、频率、占空比、分辨率、幅值。