前言
现如今相机在制造业领域发展十分迅速,相机的各种运用场景需求性也越来越高。在当下相机主要分为软触发和硬触发,今天主要研究下硬触发的接线
部触发下实时采集图像
1 环境配置
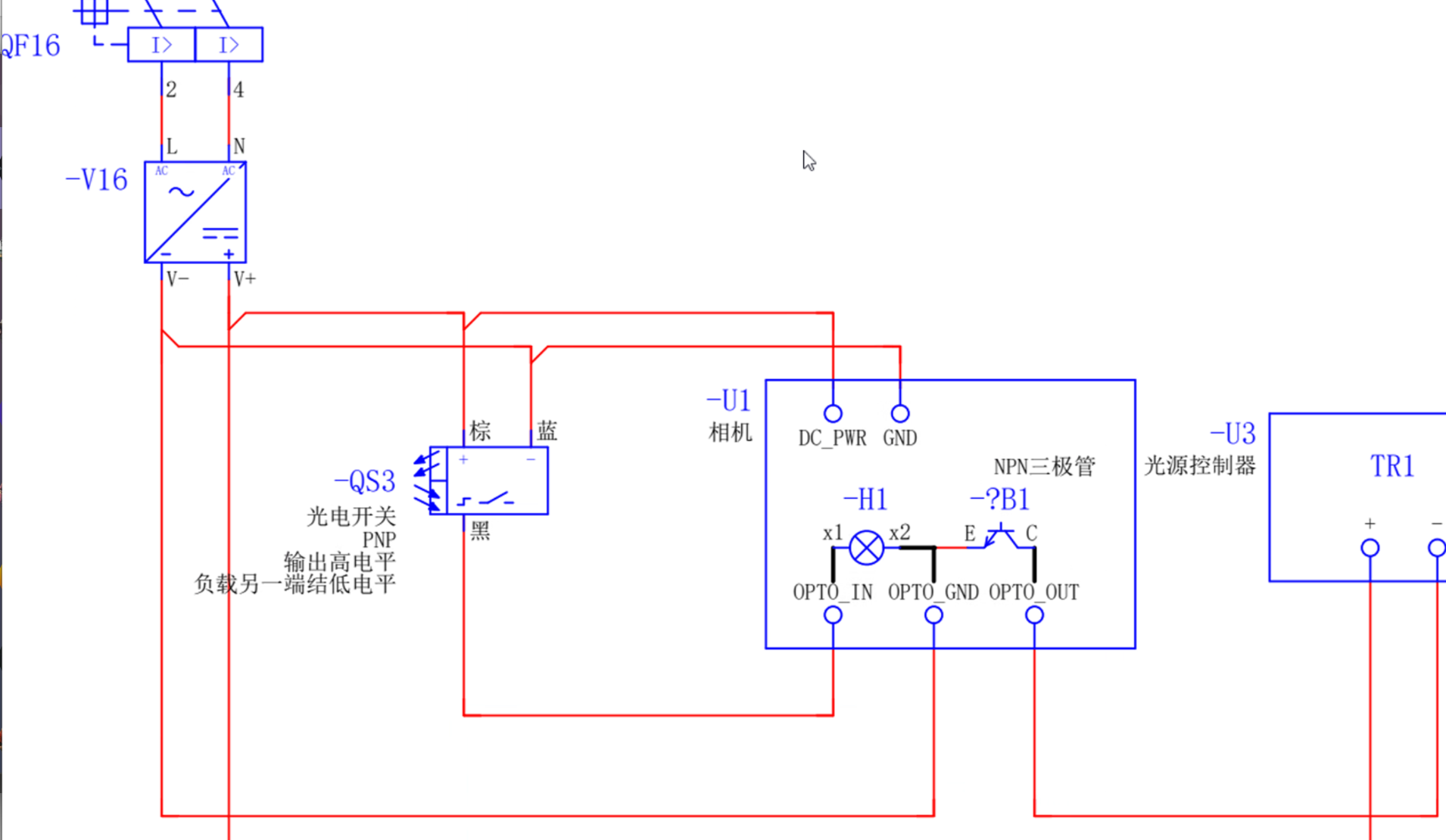
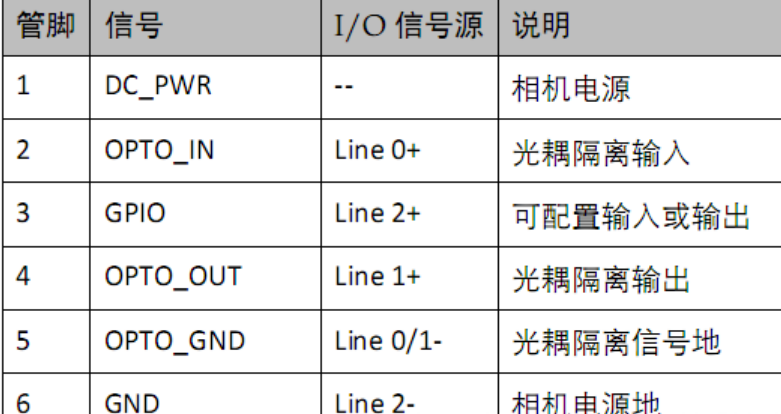
上几章讲过怎么连到相机 配置网络ip 这是相机接线的电路图用的光电开关
2VisionPro实现
打开VisionPro 连接到相机
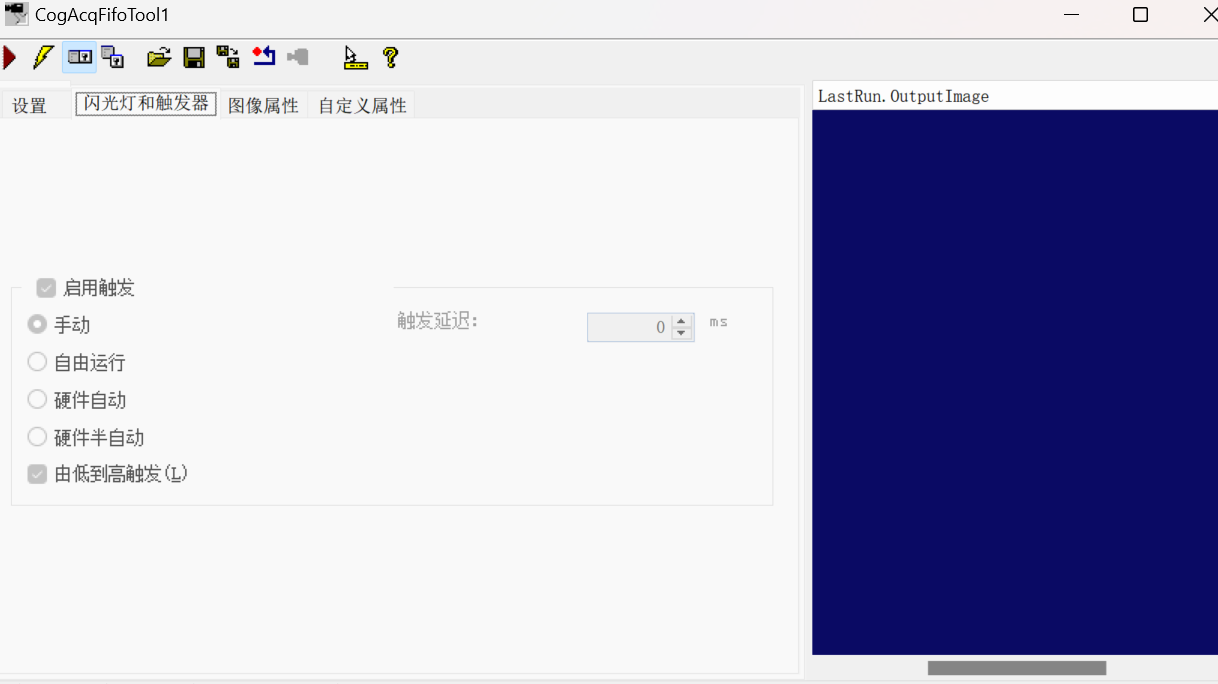
闪光灯和触发器 选择硬件自动
然后点开自定义属性 添加属性
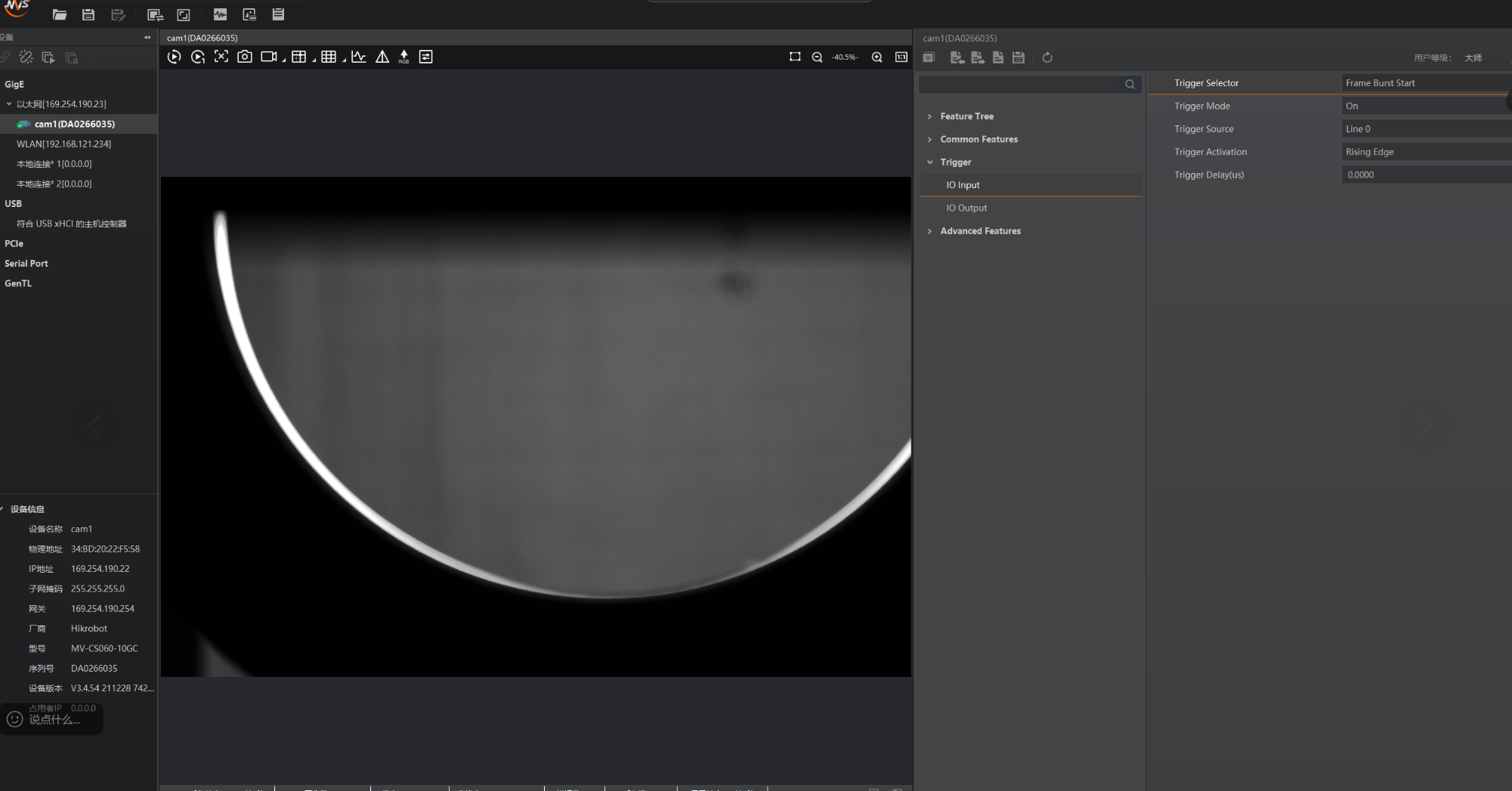
当时我在MVS已经配置过了 输入配置
输出配置
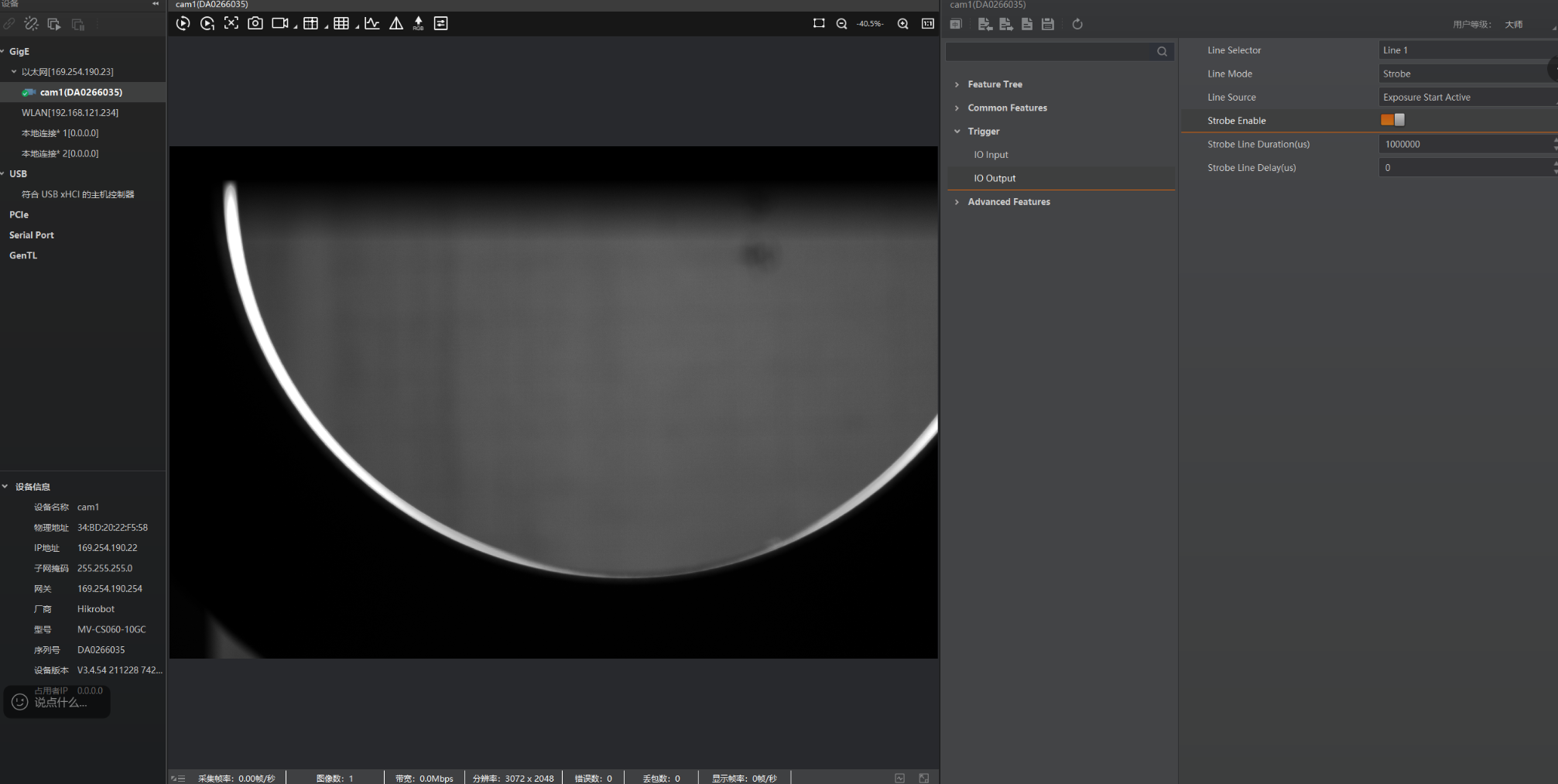
然后根据上面找到对应的属性然后添加修改值即可
如果找不到某些属性可以GitE 写入 写你的特性在写值
已经添加过的属性 可以在这理进行读取

然后就可以通过硬触发进行拍照
C#实现
1.可以保存刚才已经修改过的相机硬触发配置vpp在c#加载vpp即可
2.没有保存好的vpp也就意味着我们需要在使用CogAcqFifoTool相机工具重新配置
注:项目生成改x64不然检测不到相机
配置闪光灯和触发器选项卡的配置 对应的C#代码
配置闪光灯和触发器选项卡的配置
acqTool.Operator.OwnedTriggerParams.TriggerModel = CogAcqTriggerModelConstants.FreeRun; 自由运行
acqTool.Operator.OwnedTriggerParams.TriggerModel = CogAcqTriggerModelConstants.Manual; 手动
acqTool.Operator.OwnedTriggerParams.TriggerModel = CogAcqTriggerModelConstants.Semi; 硬件半自动
acqTool.Operator.OwnedTriggerParams.TriggerModel = CogAcqTriggerModelConstants.Auto; 硬件自动
自定义属性 跟上面vpp配置的一样
cs
acqTool.Operator.OwnedTriggerParams.TriggerModel = CogAcqTriggerModelConstants.Auto; // 硬件自动
acqTool.Operator.FrameGrabber.OwnedGigEAccess.SetFeature("TriggerMode", "On");
acqTool.Operator.FrameGrabber.OwnedGigEAccess.SetFeature("TriggerSource", "Line0");
acqTool.Operator.FrameGrabber.OwnedGigEAccess.SetFeature("TriggerActivation", "RisingEdge");
acqTool.Operator.FrameGrabber.OwnedGigEAccess.SetFeature("TriggerDelay", "0");
acqTool.Operator.FrameGrabber.OwnedGigEAccess.SetFeature("LineSelector", "Line1");
acqTool.Operator.FrameGrabber.OwnedGigEAccess.SetFeature("LineMode", "Strobe");
acqTool.Operator.FrameGrabber.OwnedGigEAccess.SetFeature("LineSource", "ExposureStartActive");
acqTool.Operator.FrameGrabber.OwnedGigEAccess.SetFeature("StrobeEnable", "1");
acqTool.Operator.FrameGrabber.OwnedGigEAccess.SetFeature("StrobeLineDuration", "1000000");
acqTool.Operator.FrameGrabber.OwnedGigEAccess.SetFeature("StrobeLineDelay", "0");