在Linux操作系统中,视频流的获取和处理是许多多媒体和计算机视觉应用的基础,无论是在实时监控、视频分析,还是在机器人视觉、自动驾驶等领域,视频流的高效捕捉和处理至关重要。Linux提供了多种工具和库来实现视频流的获取,其中 V4L2(Video4Linux2) 和 OpenCV 是最常用的两种方式。
1 两种方式优劣
V4L2 是Linux平台下的视频采集标准接口,它提供了与摄像头等视频设备进行交互的低级别控制方式,可以直接操作硬件设备进行视频流的捕捉,具有高效且灵活的优势。而 OpenCV 则是一个广泛使用的计算机视觉库,它封装了V4L2等底层接口,提供了更高级别、易于使用的API,适合进行快速开发和原型设计。两者在实现上各有特点,V4L2适合需要细粒度控制的低级操作,而OpenCV则适合对开发效率有较高要求的项目。
V4L2 相较于 OpenCV 更加复杂,需要进行底层的设备控制和手动配置,但它在 CPU 占用方面表现出色。
2 V4l2打开方式
2.1 查看存在的摄像头
cmd
v4l2-ctl --list-devices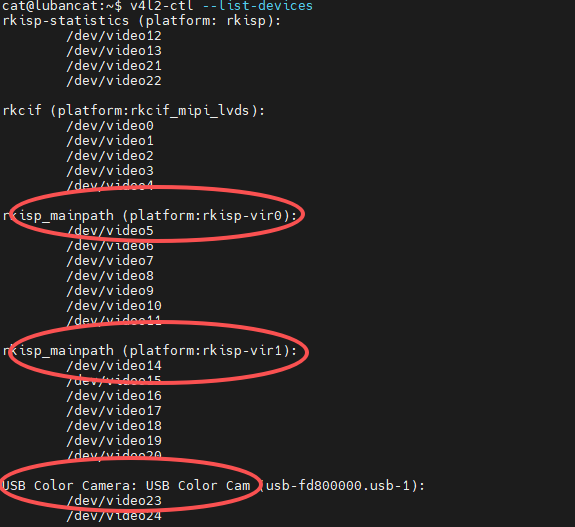
如图所示,为了演示,我这里上了两个ov8858和一个普通usb摄像头。
ov8858打开设备树方式请看这里:ov8858
2.2 查看摄像头类型
cmd
v4l2-ctl --list-formats-ext --device=/dev/video5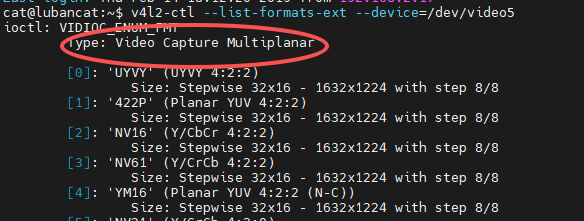
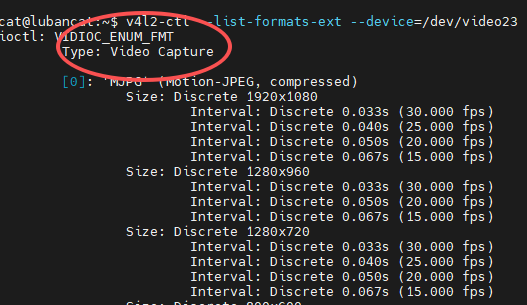
如图所示,两种相机的类型并不相同,USB摄像机是Video Capture,ov8858的类型为Video Capture Multiplanar,这里为什么强调这个,因为后面写代码会用到。
而摄像头下面的UYVY、422P、MJPG等为摄像头支持的格式,注意这里的1632x1224 和1920x1080 ,表示最大支持分辨率,而不是只支持这一种分辨率。
2.3 V4l2测试代码
C++
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <unistd.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <linux/types.h>
#include <linux/videodev2.h>
#include <poll.h>
#include <sys/mman.h>
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace std;
typedef struct CameraParam__{
//camUrl eg: /dev/video0
const char* camUrl;
//camType eg: 1/2
int camType;
unsigned int outDataFormat;
unsigned int camWidth;
unsigned int camHight;
}CameraParam;
class V4l2Util
{
public:
V4l2Util()
{
}
~V4l2Util()
{
CloseCamera();
}
public:
bool InitCaptureParams(CameraParam camParam);
void GetCurFrame1(cv::Mat& curFrame);
void GetCurFrame2(cv::Mat& curFrame);
private:
bool CheckCameraSupport(CameraParam camParam);
bool MultiPlaneRequestBuffer();
bool SinglePlaneRequestBuffer();
void CloseCamera();
private:
int m_nCaptureFd;
int m_nBufType;
int m_nCamType;
int m_nNumPlanes;
void *m_pType2Buffer[VIDEO_MAX_FRAME][VIDEO_MAX_PLANES];
void *m_pType1Buffer;
v4l2_buffer m_pV4l2Buffer1;
int m_nGotBuffCount;
int m_nOutDataType;
int m_nFrameWidth;
int m_nFrameHeight;
};
void V4l2Util::GetCurFrame1(cv::Mat& curFrame)
{
if(m_nCamType != 1)
{
cerr << "Please Select The Correct Function!!" << endl;
return;
}
//v4l2_buffer buffer;
// 获取图像数据
if (ioctl(m_nCaptureFd, VIDIOC_QBUF, &m_pV4l2Buffer1) == -1)
{
cerr << "Failed to enqueue buffer!" << endl;
return;
}
fd_set fds;
FD_ZERO(&fds);
FD_SET(m_nCaptureFd, &fds);
timeval tv;
tv.tv_sec = 2;
tv.tv_usec = 0;
// 等待数据准备就绪
int r = select(m_nCaptureFd + 1, &fds, NULL, NULL, &tv);
if (r == -1)
{
cerr << "Failed to wait for data!" << endl;
return;
}
else if (r == 0)
{
cerr << "Timeout waiting for data!" << endl;
return;
}
// 获取图像数据
if (ioctl(m_nCaptureFd, VIDIOC_DQBUF, &m_pV4l2Buffer1) == -1)
{
cerr << "Failed to dequeue buffer!" << endl;
return;
}
std::vector<uchar> bufVec((uchar*)m_pType1Buffer, (uchar*)m_pType1Buffer + m_pV4l2Buffer1.bytesused); // 转换为vector<uchar>
curFrame = imdecode(bufVec, cv::IMREAD_COLOR);
}
void V4l2Util::GetCurFrame2(cv::Mat& curFrame)
{
if(m_nCamType != 2)
{
cerr << "Please Select The Correct Function!!" << endl;
return;
}
curFrame = cv::Mat();
struct pollfd fds[1];
struct v4l2_buffer buf;
struct v4l2_plane planes[m_nNumPlanes];
memset(fds, 0, sizeof(fds));
fds[0].fd = m_nCaptureFd;
fds[0].events = POLLIN;
if (poll(fds, 1, -1) == 1)
{
memset(&buf, 0, sizeof(struct v4l2_buffer));
buf.type = m_nBufType;
buf.memory = V4L2_MEMORY_MMAP;
buf.m.planes = planes;
buf.length = m_nNumPlanes;
if (ioctl(m_nCaptureFd, VIDIOC_DQBUF, &buf) != 0)
{
printf("Unable to dequeue buffer\n");
curFrame = cv::Mat();
}
/* queue buffer */
if (ioctl(m_nCaptureFd, VIDIOC_QBUF, &buf) != 0)
{
printf("Unable to queue buffer\n");
}
if(m_nOutDataType == V4L2_PIX_FMT_NV21)
{
/////convert YUV to BGR for OpenCV
cv::Mat yuvImage(m_nFrameHeight + m_nFrameHeight / 2, m_nFrameWidth, CV_8UC1, m_pType2Buffer[buf.index][0]);
cvtColor(yuvImage, curFrame, cv::COLOR_YUV2BGR_NV21);
}
}
}
bool V4l2Util::InitCaptureParams(CameraParam camParam)
{
m_nCaptureFd = open(camParam.camUrl, O_RDWR);
if (m_nCaptureFd < 0)
{
printf("can not open %s\n", camParam.camUrl);
return false;
}
m_nCamType = camParam.camType;
if(camParam.camType == 1)
{ ///v4l2-ctl --list-formats-ext --device=/dev/video0
////Type: Video Capture
m_nBufType = V4L2_BUF_TYPE_VIDEO_CAPTURE;
}
else if(camParam.camType == 2)
{
////Type: Video Capture Multiplanar
m_nBufType = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
}
else
{
printf("Just Support one or two, Error camType: %d\n", camParam.camType);
return false;
}
m_nFrameWidth = camParam.camWidth;
m_nFrameHeight = camParam.camHight;
m_nOutDataType = camParam.outDataFormat;
//Judge If The Params be Supported
if(!CheckCameraSupport(camParam))
{
printf("CheckCameraSupport Failed!!!\n");
return false;
}
//// set fd camera formt
struct v4l2_format fmt;
fmt.type = m_nBufType;
fmt.fmt.pix.width = camParam.camWidth;
fmt.fmt.pix.height = camParam.camHight;
fmt.fmt.pix.pixelformat = m_nOutDataType;
fmt.fmt.pix.field = V4L2_FIELD_ANY;
if (0 == ioctl(m_nCaptureFd, VIDIOC_S_FMT, &fmt))
{
m_nNumPlanes = fmt.fmt.pix_mp.num_planes;
printf("get m_nNumPlanes: %d \n", m_nNumPlanes);
printf("the final frame-size has been set : %d x %d\n", fmt.fmt.pix.width, fmt.fmt.pix.height);
}
else
{
printf("can not set format\n");
return false;
}
if(m_nCamType == 1)
{
if(!SinglePlaneRequestBuffer())
{
printf("MultiPlaneRequestBuffer Error\n");
return false;
}
}
else if(m_nCamType == 2)
{
if(!MultiPlaneRequestBuffer())
{
printf("MultiPlaneRequestBuffer Error\n");
return false;
}
}
// queue buffer
for(int i = 0; i < m_nGotBuffCount; ++i)
{
struct v4l2_buffer buf;
struct v4l2_plane planes[m_nNumPlanes];
memset(&buf, 0, sizeof(struct v4l2_buffer));
memset(&planes, 0, sizeof(planes));
buf.index = i;
buf.type = m_nBufType;
buf.memory = V4L2_MEMORY_MMAP;
buf.m.planes = planes;
buf.length = m_nNumPlanes;
if (0 != ioctl(m_nCaptureFd, VIDIOC_QBUF, &buf))
{
perror("Unable to queue buffer");
return false;
}
}
//// start camera
if (0 != ioctl(m_nCaptureFd, VIDIOC_STREAMON, &m_nBufType))
{
printf("Unable to start capture\n");
return -1;
}
return true;
}
bool V4l2Util::SinglePlaneRequestBuffer()
{
//v4l2_buffer buffer;
memset(&m_pV4l2Buffer1, 0, sizeof(v4l2_buffer));
// request buffer
v4l2_requestbuffers req;
req.count = 1;
req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
req.memory = V4L2_MEMORY_MMAP;
if (ioctl(m_nCaptureFd, VIDIOC_REQBUFS, &req) == -1)
{
cerr << "Failed to request buffers!" << endl;
close(m_nCaptureFd);
return false;
}
// mapping requested buffer
m_pV4l2Buffer1.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
m_pV4l2Buffer1.memory = V4L2_MEMORY_MMAP;
m_pV4l2Buffer1.index = 0;
if (ioctl(m_nCaptureFd, VIDIOC_QUERYBUF, &m_pV4l2Buffer1) == -1)
{
cerr << "Failed to query buffer!" << endl;
close(m_nCaptureFd);
return false;
}
m_pType1Buffer = mmap(NULL, m_pV4l2Buffer1.length, PROT_READ | PROT_WRITE, MAP_SHARED, m_nCaptureFd, m_pV4l2Buffer1.m.offset);
if (m_pType1Buffer == MAP_FAILED)
{
cerr << "Failed to map buffer!" << endl;
close(m_nCaptureFd);
return false;
}
return true;
}
bool V4l2Util::MultiPlaneRequestBuffer()
{
// ///require buffer
struct v4l2_requestbuffers rb;
memset(&rb, 0, sizeof(struct v4l2_requestbuffers));
//////can adjust
//rb.count = 32;
rb.count = 4;
rb.type = m_nBufType;
rb.memory = V4L2_MEMORY_MMAP;
if (0 == ioctl(m_nCaptureFd, VIDIOC_REQBUFS, &rb))
{
m_nGotBuffCount = rb.count;
for(int i = 0; i < rb.count; i++)
{
struct v4l2_buffer buf;
struct v4l2_plane planes[m_nNumPlanes];
memset(&buf, 0, sizeof(struct v4l2_buffer));
memset(&planes, 0, sizeof(planes));
buf.index = i;
buf.type = m_nBufType;
buf.memory = V4L2_MEMORY_MMAP;
buf.m.planes = planes;
buf.length = m_nNumPlanes;
if (0 == ioctl(m_nCaptureFd, VIDIOC_QUERYBUF, &buf))
{
for (int j = 0; j < m_nNumPlanes; j++)
{
m_pType2Buffer[i][j] = mmap(NULL, buf.m.planes[j].length, PROT_READ | PROT_WRITE, MAP_SHARED,
m_nCaptureFd, buf.m.planes[j].m.mem_offset);
if (m_pType2Buffer[i][j] == MAP_FAILED)
{
printf("Unable to map buffer\n");
return false;
}
}
}
else
{
printf("can not query buffer\n");
return false;
}
}
}
else
{
printf("can not request buffers\n");
return false;
}
return true;
}
bool V4l2Util::CheckCameraSupport(CameraParam camParam)
{
//query the device if support the m_nBufType
struct v4l2_capability cap;
memset(&cap, 0, sizeof(struct v4l2_capability));
if (0 == ioctl(m_nCaptureFd, VIDIOC_QUERYCAP, &cap))
{
if(m_nBufType == V4L2_BUF_TYPE_VIDEO_CAPTURE)
{
if ((cap.capabilities & V4L2_CAP_VIDEO_CAPTURE) == 0)
{
fprintf(stderr, "Error opening device: video capture mplane not supported.\n");
return false;
}
}
else if(m_nBufType == V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE)
{
if ((cap.capabilities & V4L2_CAP_VIDEO_CAPTURE_MPLANE) == 0)
{
fprintf(stderr, "Error opening device: video capture mplane not supported.\n");
return false;
}
}
if(!(cap.capabilities & V4L2_CAP_STREAMING))
{
fprintf(stderr, "does not support streaming i/o\n");
return false;
}
}
else
{
printf("can not get capability\n");
return false;
}
struct v4l2_fmtdesc fmtdesc;
int fmt_index = 0;
// enum all the type
while (1)
{
fmtdesc.index = fmt_index;
fmtdesc.type = m_nBufType;
if (ioctl(m_nCaptureFd, VIDIOC_ENUM_FMT, &fmtdesc) != 0)
{
// if no more format,exit
break;
}
// 打印格式信息
printf("Format %d: %s (0x%08x)\n", fmt_index, fmtdesc.description, fmtdesc.pixelformat);
if(m_nBufType == V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE)
{
if (fmtdesc.pixelformat == camParam.outDataFormat)
{
//Find The format, return true
return true;
}
}
else if(m_nBufType == V4L2_BUF_TYPE_VIDEO_CAPTURE)
{
return true;
}
fmt_index++;
}
printf("not found the suitable type!!\n");
return false;
}
void V4l2Util::CloseCamera()
{
/* close camera */
if (0 != ioctl(m_nCaptureFd, VIDIOC_STREAMOFF, &m_nBufType))
{
printf("Unable to stop capture\n");
return;
}
close(m_nCaptureFd);
}这段代码封装了两种类型(Video Capture和Video Capture Multiplanar)的摄像机camType为1时默认摄像头类型为Video Capture,Video Capture为2时默认摄像头类型为Video Capture Multiplanar。
以下为测试代码:
C++
#include "V4l2Util.hpp"
//1632x1224
int main()
{
////Video Capture Type Test
CameraParam params;
params.camUrl = "/dev/video23";
///V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE/V4L2_BUF_TYPE_VIDEO_CAPTURE
params.camType = 1;
params.outDataFormat = V4L2_PIX_FMT_JPEG;
// params.camWidth = 1632;
// params.camHight = 1224;
params.camWidth = 640;
params.camHight = 480;
////Video Capture Multiplanar Type Test
// CameraParam params;
// params.camUrl = "/dev/video5";
// ///V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE/V4L2_BUF_TYPE_VIDEO_CAPTURE
// params.camType = 2;
// params.outDataFormat = V4L2_PIX_FMT_NV21;
// // params.camWidth = 1632;
// // params.camHight = 1224;
// params.camWidth = 640;
// params.camHight = 480;
V4l2Util util;
if(!util.InitCaptureParams(params))
{
std::cout<<"V4l2Util Init Failed!!"<<std::endl;
return -1;
}
while(true)
{
cv::Mat frame;
util.GetCurFrame1(frame);
if(frame.empty())
{
std::cerr<<"Error Get Frame"<<std::endl;
continue;
}
cv::imshow("test",frame);
if (cv::waitKey(1) == 27) // ESC key to exit
{
break;
}
}
return 0;
}3 OpenCV打开方式
相较于 V4L2,OpenCV 的打开方式显得更加简洁和直接,只需引用 VideoCapture 类即可轻松实现视频流的捕获。然而,在使用 OpenCV 进行视频处理之前,需要确保在编译时启用了 FFmpeg 支持。因为 VideoCapture 类依赖于 FFmpeg 来解码各种视频格式。如果没有正确配置 FFmpeg,某些格式的媒体文件可能无法被正确打开和读取。
3.1 检查OpenCV
C++
#include <opencv2/opencv.hpp>
#include <iostream>
int main()
{
std::cout << "OpenCV Build Information: \n" << cv::getBuildInformation() << std::endl;
return 0;
}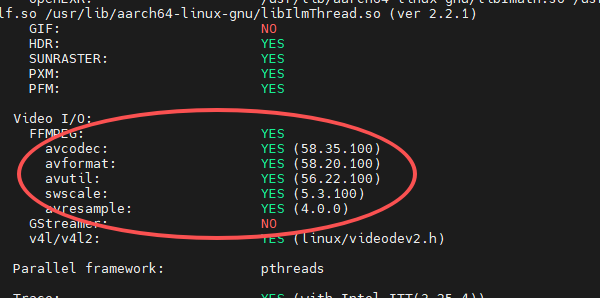
如上图所示,只有编译时启用了 FFmpeg 支持,才能正确打开视频流。
3.2 OpenCV打开视频流代码
c++
#include <opencv2/opencv.hpp>
#include <iostream>
int main()
{
cv::VideoCapture cap(23);
std::cout << "OpenCV Build Information: \n" << cv::getBuildInformation() << std::endl;
// 检查摄像头是否成功打开
if (!cap.isOpened())
{
std::cerr << "无法打开摄像头!" << std::endl;
return -1;
}
//1632x1224
// 获取摄像头的分辨率
double width = cap.get(cv::CAP_PROP_FRAME_WIDTH);
double height = cap.get(cv::CAP_PROP_FRAME_HEIGHT);
// double width = 1632;
// double height = 1224;
std::cout << "摄像头分辨率: " << width << "x" << height << std::endl;
// 创建一个窗口
cv::namedWindow("Camera Feed", cv::WINDOW_NORMAL);
// 捕获视频流并显示
cv::Mat frame;
while (true)
{
// 读取一帧
cap >> frame; // 或者 cap.read(frame)
// 检查是否成功读取帧
if (frame.empty())
{
std::cerr << "读取视频帧失败!" << std::endl;
break;
}
// 显示帧
cv::imshow("Camera Feed", frame);
// 如果按下 'q' 键,退出循环
if (cv::waitKey(1) == 'q') {
break;
}
}
// 释放摄像头资源并关闭窗口
cap.release();
cv::destroyAllWindows();
return 0;
}注意,这里的cv::VideoCapture cap(23)是指打开设备 /dev/video23,具体情况可根据你的设备情况更改。
4 两种方式功耗
opencv打开一路摄像头:
v4l2打开视频流:
明显能看出来v4l2比opencv的cpu占用率低,不知道是否跟opencv版本有关系,我测试的环境为Lubanat2 Debian系统,感兴趣的可以自己测一下。
总结
在Linux操作系统中,视频流的获取和处理是现代多媒体应用和计算机视觉技术的核心,广泛应用于实时监控、视频分析、机器人视觉和自动驾驶等领域。为了高效地捕捉和处理视频流,Linux提供了多种强大的工具和库,其中V4L2(Video4Linux2)和OpenCV是最常用的两种技术。V4L2为底层硬件提供了标准化的接口,支持多种视频设备,并为开发者提供了强大的功能,但使用上相对复杂,需要较多的配置和操作。相比之下,OpenCV提供了更简便的接口,使用VideoCapture类就可以轻松实现视频流的捕获和处理,但需要确保在编译时启用了FFmpeg支持,以便解码各种视频格式。通过选择合适的工具和库,开发者可以在Linux平台上实现高效、稳定的视频流获取和处理,为各种应用场景提供技术支持。