摘要:本文详细介绍了在PowerPMAC IDE环境下配置EtherCAT伺服电机的完整流程。主要内容包括:准备工作(连接硬件和获取ESI文件)、通过ESI管理器加载配置文件、网络扫描识别从站设备、变量映射(定义输入输出位置参数)、激活EtherCAT通讯(验证状态字和实际位置)以及相关参数说明。文章还概述了主站配置的8个方面和从站配置的7个选项,重点说明了PDO映射和变量分配机制,为伺服电机的EtherCAT通信配置提供了系统指导。
0. 简要
本文主要介绍在PowerPMAC IDE的环境下加载EtherCAT通讯的伺服电机。
首先要将驱动器连接到CK3M控制器,驱动器将动力学和编码器线连接。从驱动器官网或者经销商手里拿到ESI文件,即EtherCAT通讯的配置文件。
准备打开IDE环境
在菜单里面EtherCAT里面打开ESI管理器页面。

ESI管理器页面包含了设备的配置文件,根据品牌进行分类。
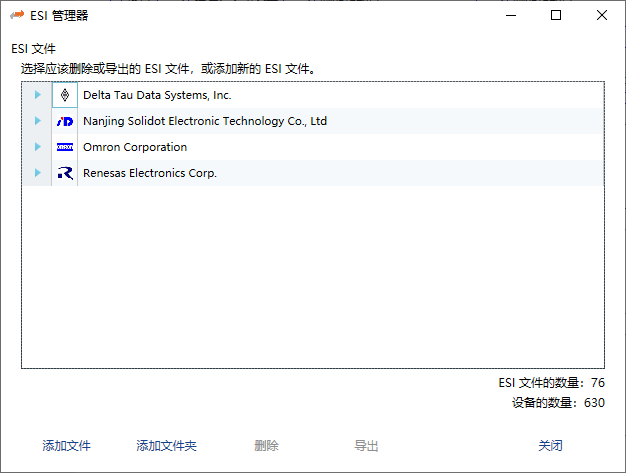
点击"添加文件",打开文件浏览器,找到配置文件,通常是xml文件,点击确定,加载文件。会有一个加载过程。
1. 配置
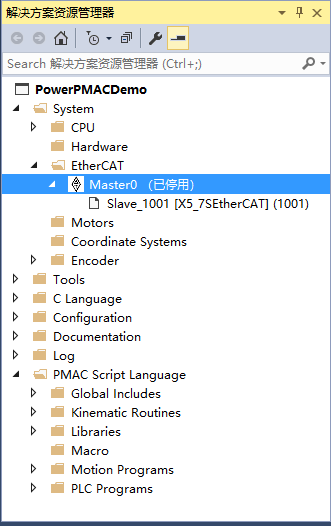
在右侧"解决方案资源管理器"中,有个文件夹EtherCAT,点击展开后有个主轴表示Master0,右击显示菜单。红色标注的是我们要依次点击的按钮。
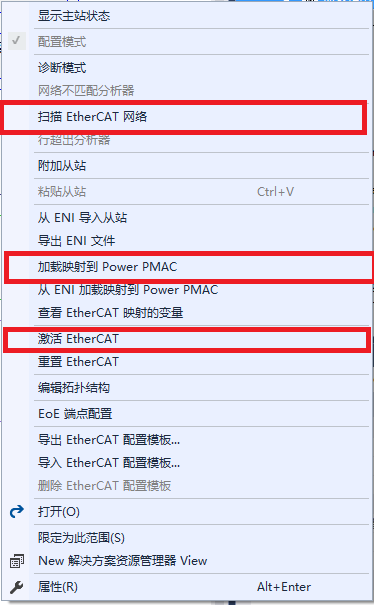
1.1识别网络
点击"扫描EtherCAT网络"按钮,通常会提示删除所有从站。当网络有所改动时,都必须重新扫描,才能识别新的设备。
扫描成功后,主站下会显示从站名称。

1.2 映射
在主站名称上右击的弹出菜单上点击"加载映射到PowerPMAC",PowerPMAC会自己产生配置文件,ECATMap.pmh

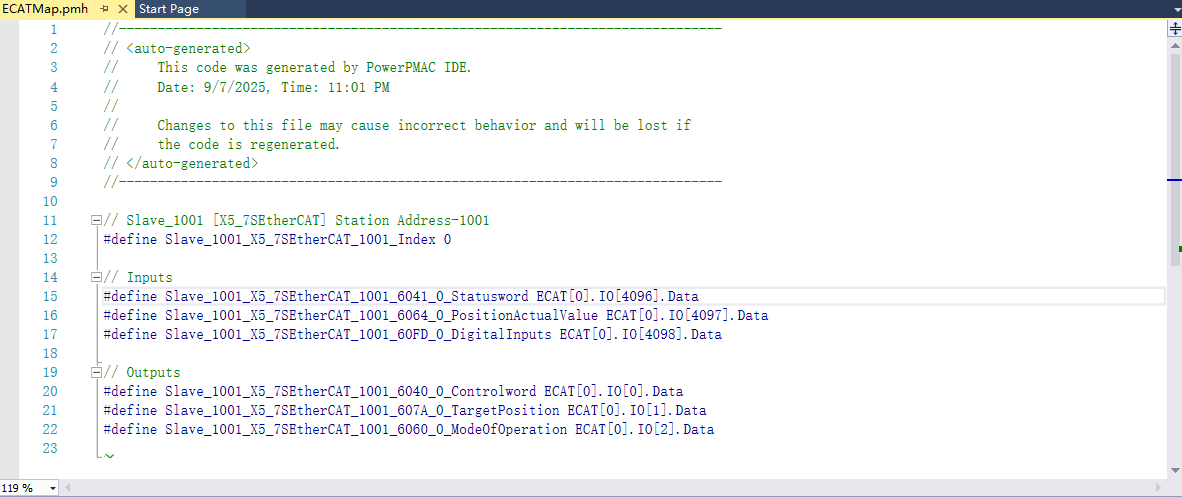
点击文件打开,看到内容,定义了电机的序号常量0,
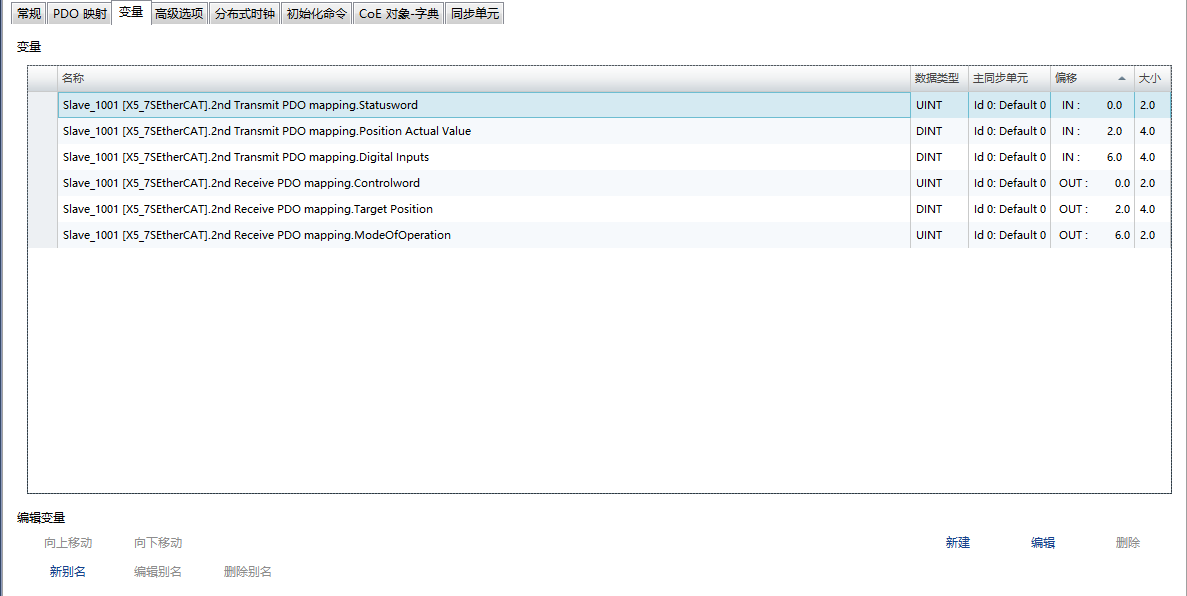
输入端定义了三个变量:
👉Statusword(状态字) ECAT0.IO4096
👉PositionActualValue(实际位置) ECAT0.IO4097
👉DigitalInputs(数字输入) ECAT0.IO4098
输出端定义了三个变量:
👉Controlword(控制字) ECAT0.IO0
👉TargetPositon(目标位置) ECAT0.IO1
👉ModeOfOperation(操作模式) ECAT0.IO2
这几个变量是一般伺服电机常用的变量,满足位置控制,不同品牌的电机默认变量是不同的。
1.3激活
在主站Master0右击菜单中点击"激活EtherCAT"则EtherCAT通讯被激活。标识变为绿色,注意,绿色为正常激活,其他颜色为异常激活。

激活后,使用Watch窗口查看,可以看到状态字和实际位置会变为有效。
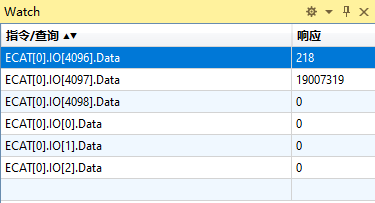
我们可以看到IO4096.Data(状态字)和IO4097.Data(实际位置)都数值,此时转动轴,实际位置会发生变化,则证明该设备EtherCAT贯通。
设备的EtherCAT的配置已经好了,如果是伺服电机还需要进行参数匹配,才能使用电机的命令控制电机运动,内容在下一篇说明。
1.4 相关参数
ECAT0.MasterReady 主站备妥信号 1;
ECAT0.Enable 主站使能标志 设置为1,使能通讯;
ECAT0.MasterState 主站状态1:INIT(初始化) 2:PREOP(准备)4:SAFEOP(安全模式)8:OP(运行模式)
2.EtherCAT主站配置说明
PowerPMAC提供了9182个内存位置给EtherCAT,0-4095是输出,4096-9181是输入,这些位置从开始依次分配,本例中看到使用了3个输入位置4096、4097、4098和三个输出位置0、1、2.之后如果增加设备则会继续分配,所以增加设备后必须重新分配地址。本节主要讲EtherCAT的配置。
2.1主站
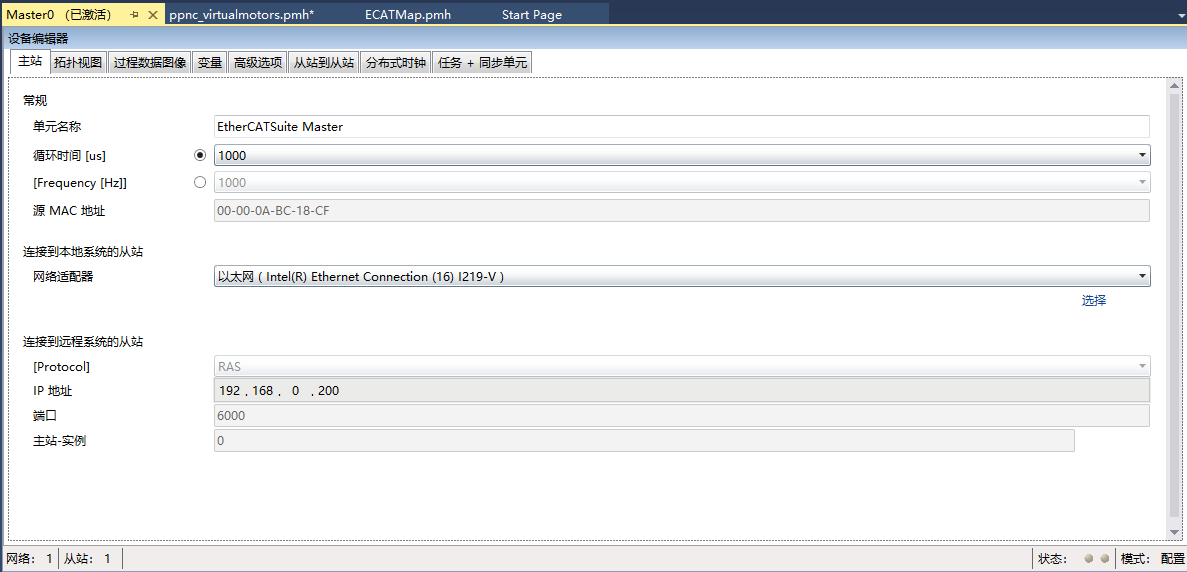
循环时间/us:指的是设置通讯时间。
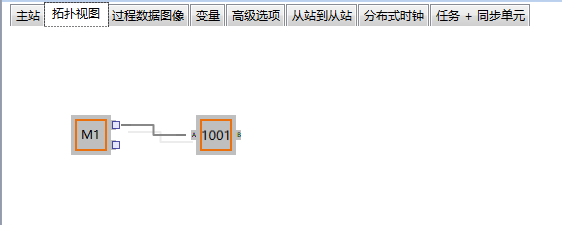
2.2拓扑视图
这页显示通讯的拓扑图。
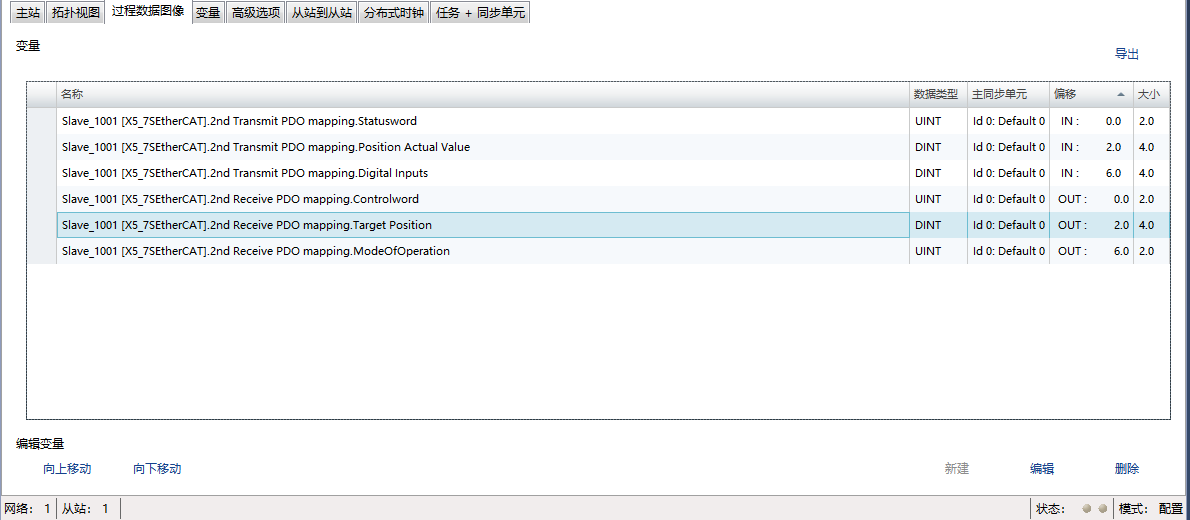
2.3过程数据图像
此页的内容是从配置文件内容读取到的。
2.4变量
2.5高级选项
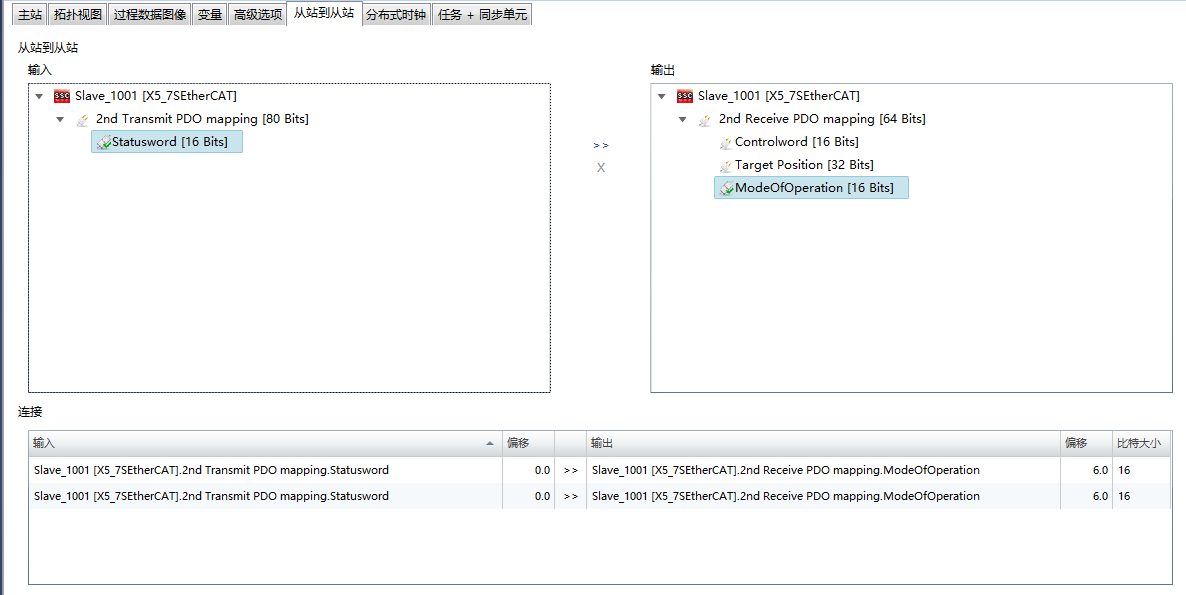
2.6从站到从站
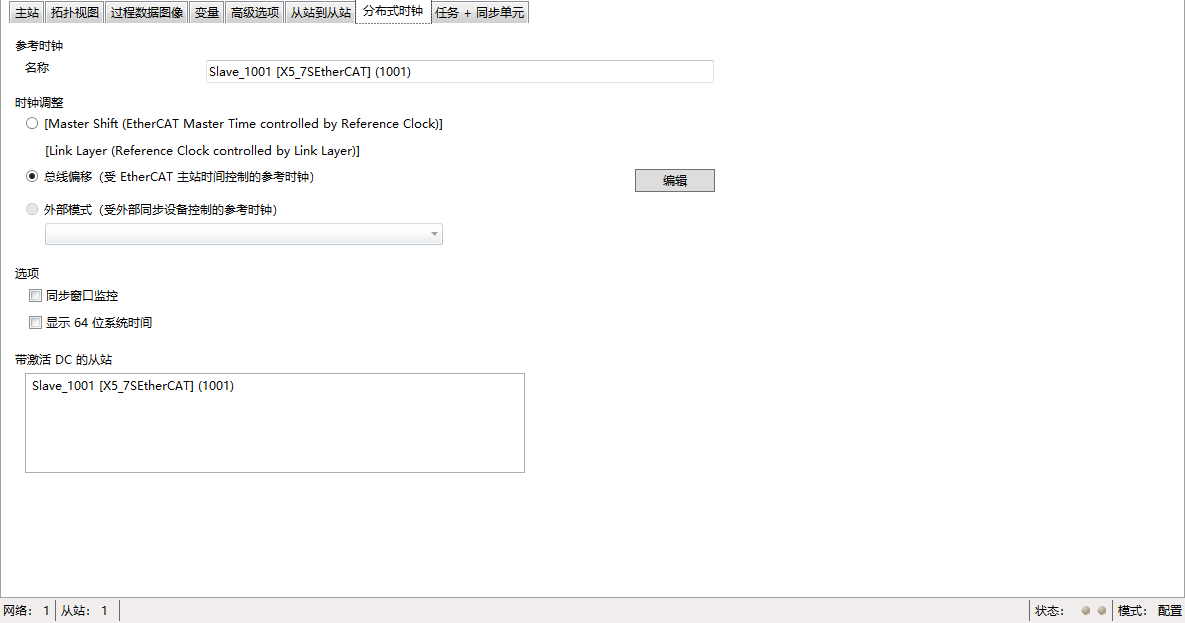
2.7分布式时钟
2.8任务+同步单元
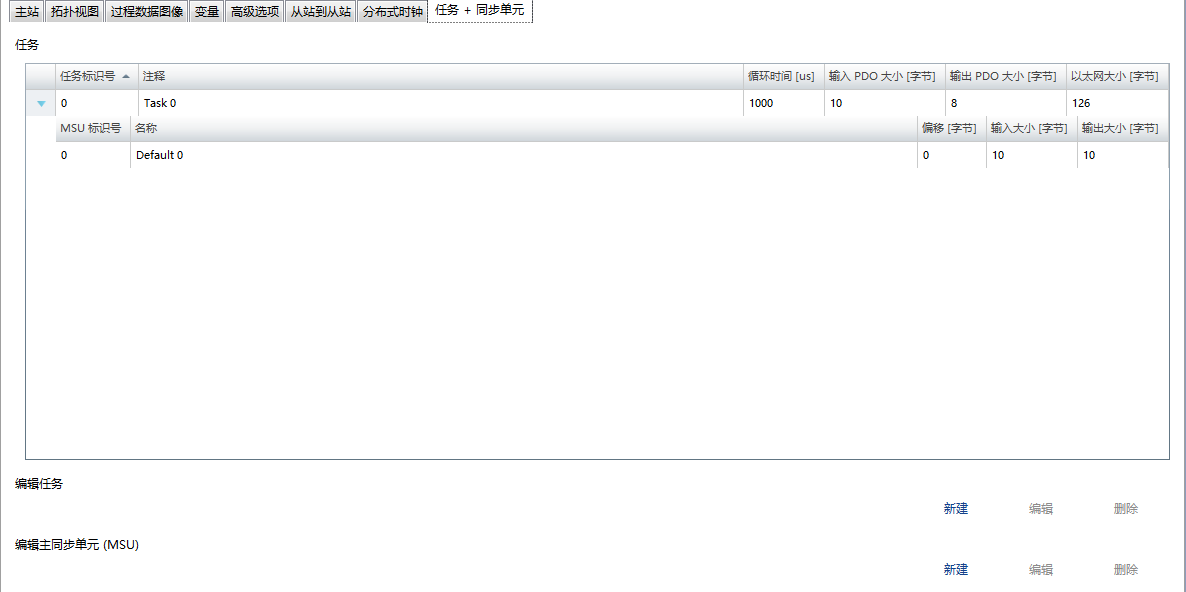
3. 从站配置说明
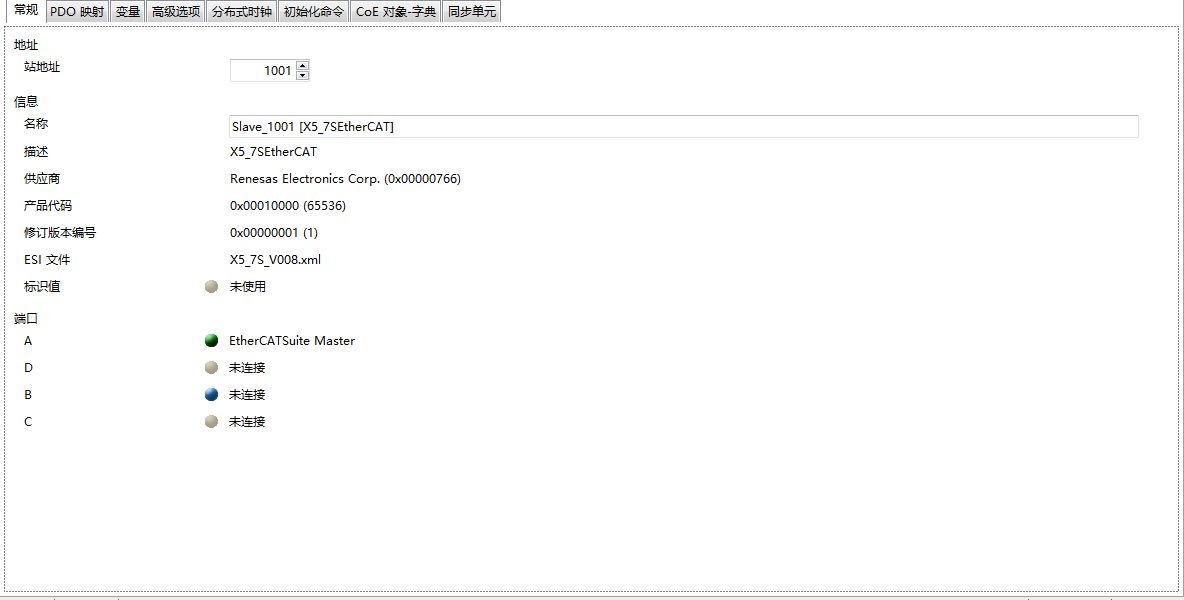
3.1 常规
3.2PDO映射
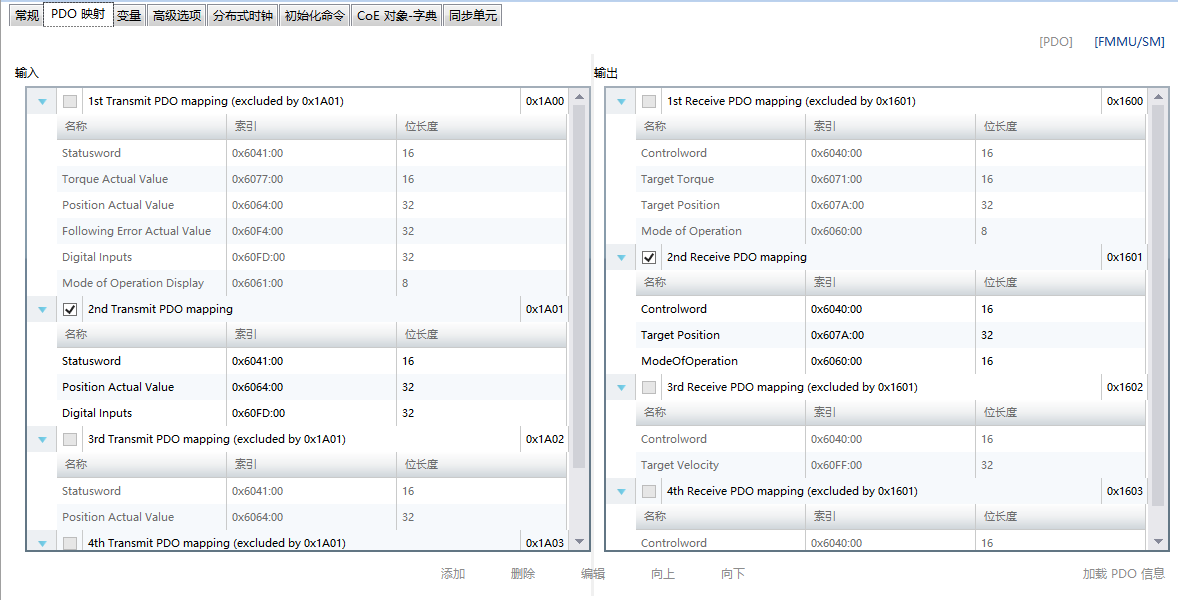
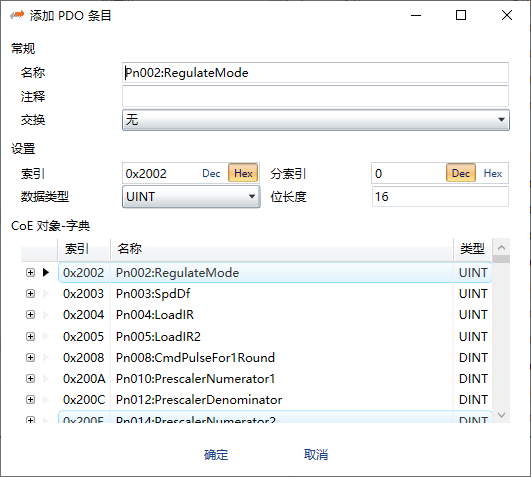
这里对应的是xml文件里面的RxPDO和TxPDO内容,此处有RxPDO和TxPDO各4份。可以在这里选择这里激活的配置模板。其他模式,比如速度模式、力矩模式等可以在不同模板里显示。
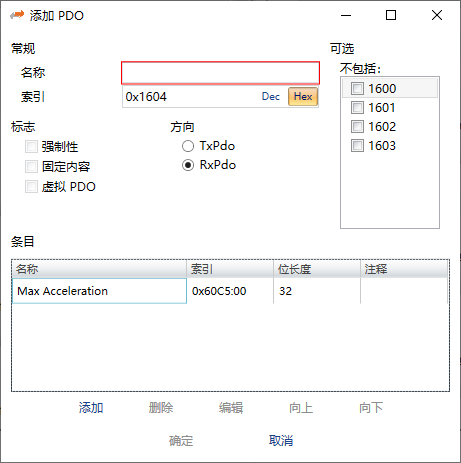
想要添加xml中没有的信号,可以在这里点击"添加"进行参数添加。
3.3 变量
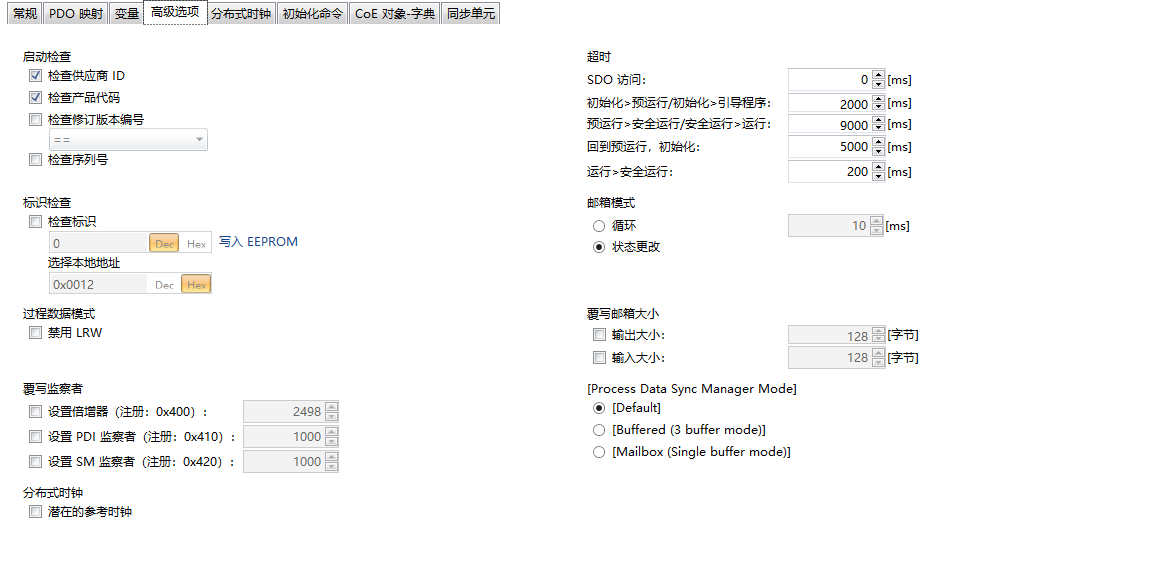
3.4高级选项
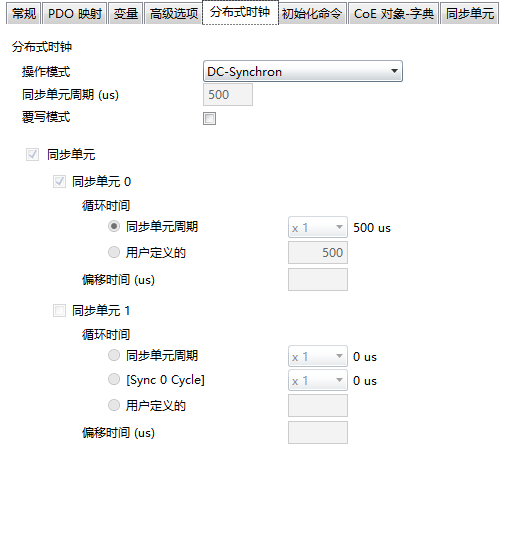
3.5分布式时钟
3.6初始化命令
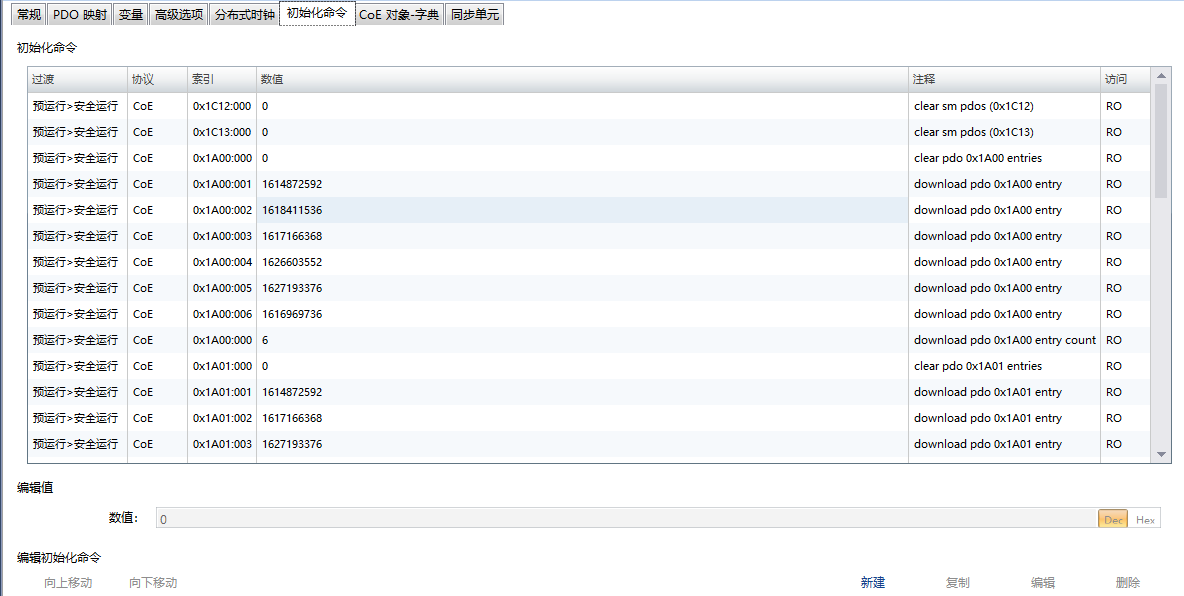
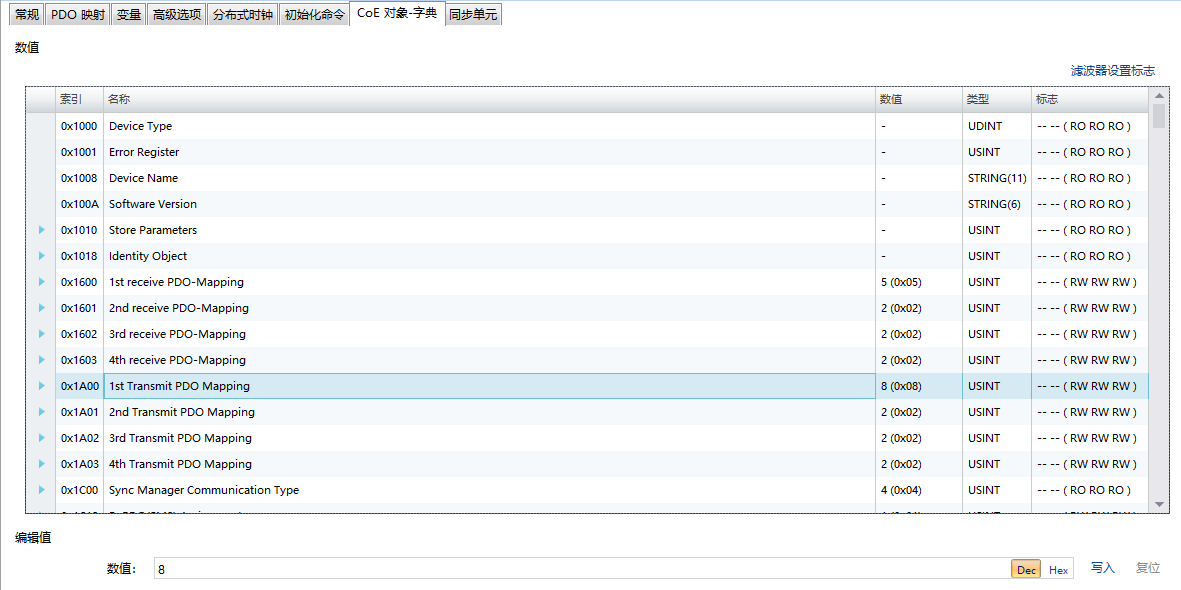
3.7CoE对象字典
3.8同步单元
