1、毫米波雷达的技术特点
如下图所示毫米波雷达的波长在4mm左右,远高于可见光和红外激光,传统的3D毫米波雷达提供距离向、水平方位向和速度向信息,目前开始流行的4D毫米波雷达可以提供距离向、水平方位向、俯仰向和速度向信息。
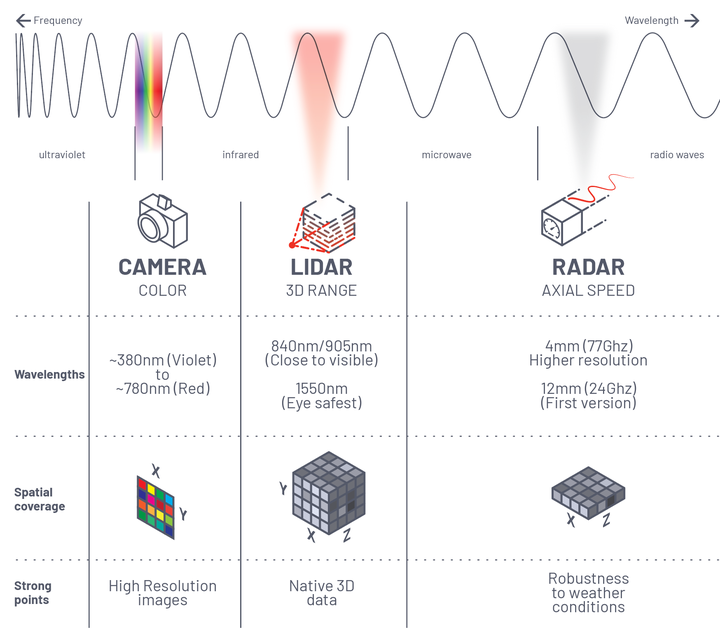 图1 三大主传感器的技术特点
图1 三大主传感器的技术特点
 图2 三大主传感器的技术特点
图2 三大主传感器的技术特点
毫米波雷达相比较Camera和Lidar,具有全天候工作能力,在恶劣天气条件下(如雨、雾、烟、灰尘)仍能保持良好的探测性能,不受光线、温度等环境因素的影响,具有较强的抗干扰能力;能够穿透非金属材料(如塑料、布料等),在某些应用场景中具有较好的穿透能力,在穿透金属和液体方面的能力相对有限,这在某些应用场景下可能受到限制;虽然毫米波在雨、雾、大气湿度等天气条件下的传播性能可能会受到影响,导致信号损失或反射不清晰,但是在对多种环境的适应性仍强于Camera和Lidar。
毫米波雷达相比较Camera和Lidar,与激光雷达相比,毫米波雷达的空间分辨率较低,精度一般在米级别。此外,毫米波雷达对行人的反射波弱,难以识别。与Camera相比,更是很难对目标的具体类型进行识别。但是毫米波雷达能够提供同时提供目标的距离、方位和速度信息,这是其他两种传感器所不具备的。毫米波雷达的探测Frame Rate目前远高于Lidar,其目标的跟踪性能更优。
毫米波雷达体积小、重量轻,便于集成和部署,适合大规模应用。虽然其制造成本相对较高,但相比其他雷达技术(如激光雷达)更具成本优势。毫米波雷达的功耗相对较低,适合长时间运行。
综上:毫米波雷达是一个各项综合表现更均衡的自动驾驶传感器。
2、毫米波雷达的系统组成
下图为毫米波雷达的爆炸图,该图中的MMIC和MCU还是分开的。
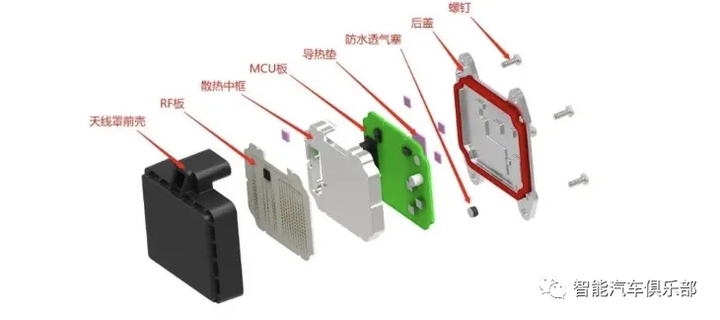 图3 毫米波雷达爆炸图
图3 毫米波雷达爆炸图
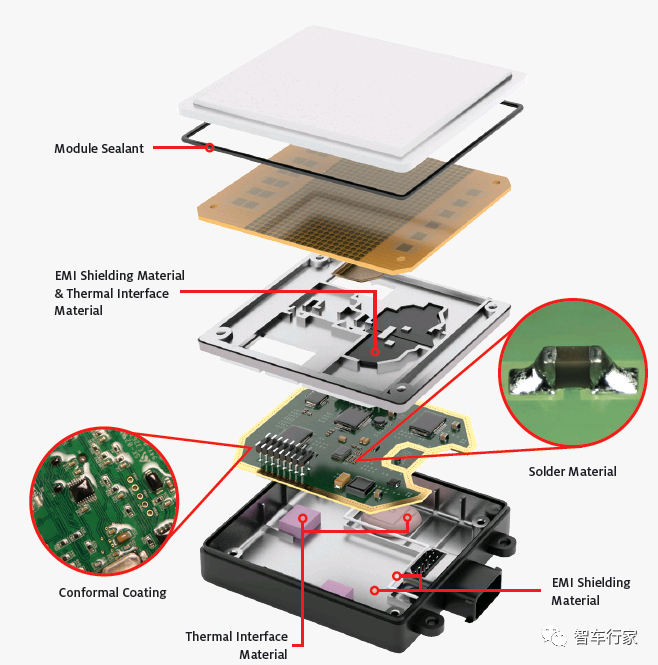 图4 某毫米波雷达爆炸图(正面)
图4 某毫米波雷达爆炸图(正面)
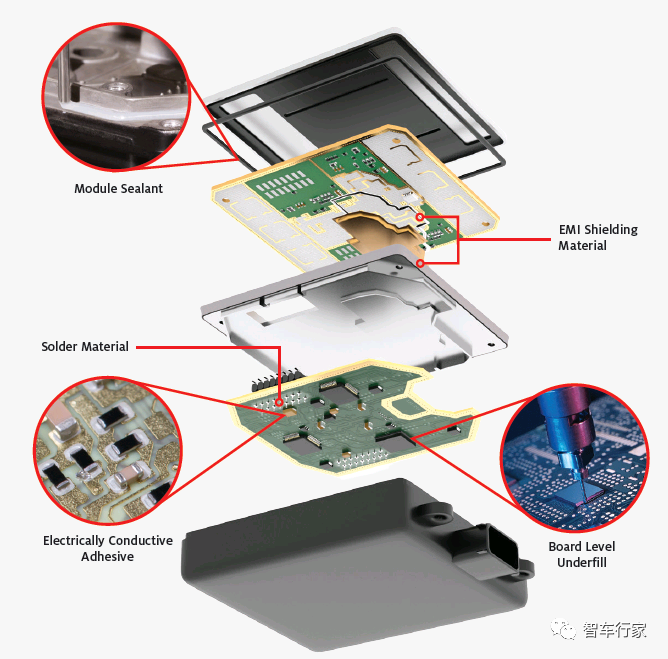 图5 某毫米波雷达爆炸图(反面)
图5 某毫米波雷达爆炸图(反面)
Ref:https://news.eeworld.com.cn/qrs/ic494656.html
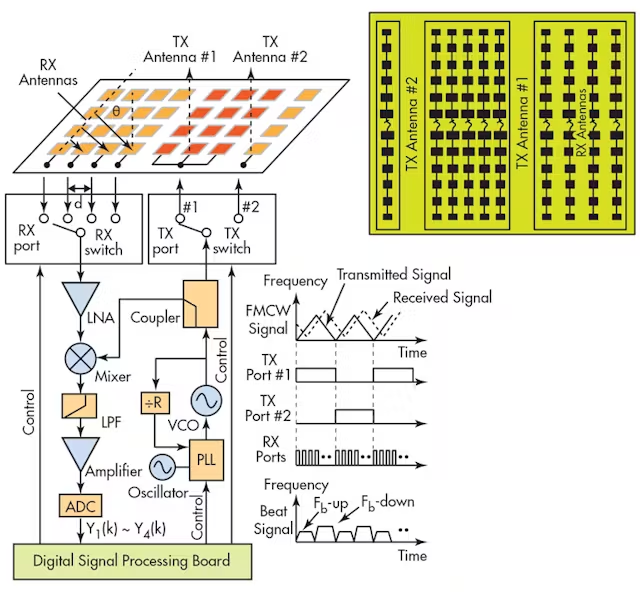 图6 毫米波雷达工作原理
图6 毫米波雷达工作原理
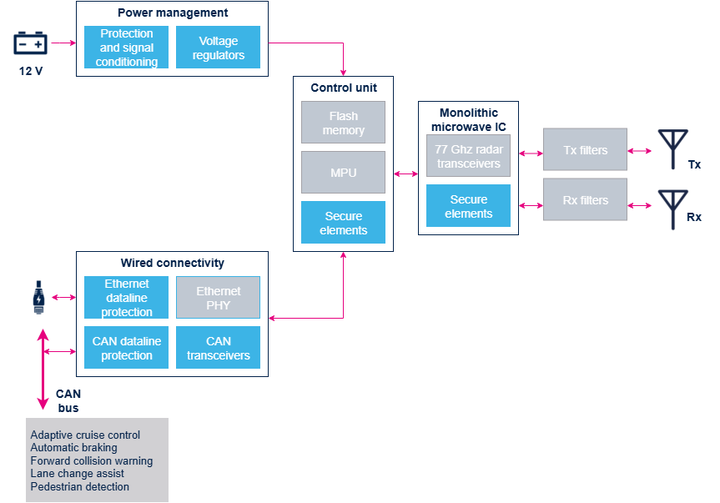 图7 3D毫米波雷达系统架构
图7 3D毫米波雷达系统架构
毫米波雷达主要由以下几个部分组成
天线:负责毫米波信号的发射和接收。天线可以是阵列天线,通过多个天线单元实现波束成形和方向性控制;
MMIC:将射频前端功能集成到单片微波集成电路(MMIC)中,以提高集成度和性能;
MCU:用于信号处理和算法执行,如目标识别、跟踪和数据处理;
PMIC:负责系统的电源管理,为各模块提供稳定的电源;
接口器件:通过串行接口(如SPI、CAN、以太网)连接控制单元和外部设备;
小结:后续章节将对相关部分进行详细介绍。