一、介绍RPC
RPC(Remote Procedure Call)远程过程调用,一种通过网络从远程计算器上请求服务,而不需要了解底层网络通信细节,RPC可以使用多种网络协议进行通信,并且在TCP/IP网络四层模型中跨越了传输层和应用层。RPC就是像调用本地方法一样调用远程方法。
项目技术选取:
1.实现一个远程调用接口call,然后通过传入函数名参数来调用RPC接口
2.选取JSON类型来进行网络传输的参数和返回值映射到RPC接口上
3.网络传输:选取muduo库
4.序列化和反序列化:JSON
主要环境为Linux(Ubuntu)
二、 介绍JSON
Json是一种数据交换格式,它采用完全独立于变成语言的文本格式来存储和表示数据
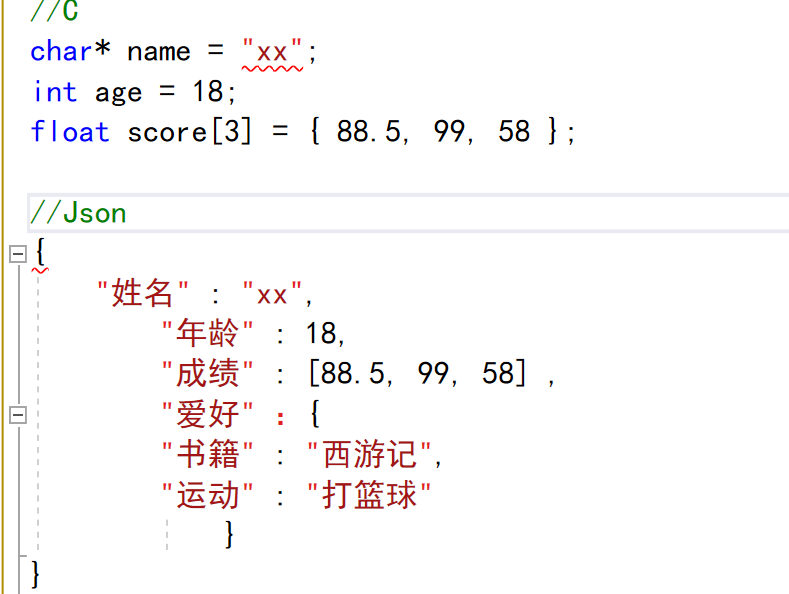
JsonCpp库主要是用于实现Json格式数据的序列化和反序列化,他实现了将多个数据对象组织成为Json格式字符串,以及将json格式字符串解析得到多个数据对象的功能
cpp
class JSON {
public:
static bool serialize(const Json::Value &val, std::string &body) {
std::stringstream ss;
//先实例化一个工厂类对象
Json::StreamWriterBuilder swb;
//通过工厂类对象来生产派生类对象
std::unique_ptr<Json::StreamWriter> sw(swb.newStreamWriter());
int ret = sw->write(val, &ss);
if (ret != 0) {
ELOG("json serialize failed!");
return false;
}
body = ss.str();
return true;
}
static bool unserialize(const std::string &body, Json::Value &val) {
Json::CharReaderBuilder crb;
std::string errs;
std::unique_ptr<Json::CharReader> cr(crb.newCharReader());
bool ret = cr->parse(body.c_str(), body.c_str() + body.size(), &val, &errs);
if (ret == false) {
ELOG("json unserialize failed : %s", errs.c_str());
return false;
}
return true;
}
};三、介绍Muduo库
Muduo库是一个基于非阻塞IO和事件驱动的C++高并发TCP网络编程库,是一款基于主从Reactor模型的网络库,主要使用的线程模型是 one loop per thread即一个线程只能有一个事件循环,用于响应计时器和IO事件
一个文件描述符只能由一个线程进行读写,这里只做简单叙述,后面具体项目代码中会使用
四、C++11 异步操作
std::future 是C++11标准库中的一个模版类,他表示一个异步操作的结果,当我们在多线程编程中使用异步任务时,std::future可以帮助我们在需要的时候获取任务的执行结果,他能够阻塞当前线程,直到异步操作完成,从而确保我们在获取结果时不会遇到未完成的操作。
五、项目设计
理解项目功能
本质上来讲,我们要实现远程调用思想并不复杂,其实就是客户端想要完成某个任务的处理,但是这个处理过程并不是自己来完成,而是将请求发送到服务器上,让服务器来帮助其完成处理过程,并返回结果,客户端拿到结果后返回
但是一对多火一对一的关系中,一但服务端掉线,则客户端无法进行远端调用,且服务器的负载也会较高,我们选择设计为分布式的架构(由多个节点组成一个系统,这些节点通常指的是服务器,将不同的业务或者同一个业务拆分在不同节点上,通过协同工作解决高并发的问题,提高系统扩展性和可用性)主要是增加一个注册中心,基于注册中心不同的服务向注册中心进行注册,客户端在进行调用时先通过注册中心进行服务发现,找到能够提供服务的服务器
项目还提供了发布订阅功能,依托客户端围绕服务端进行消息的转发
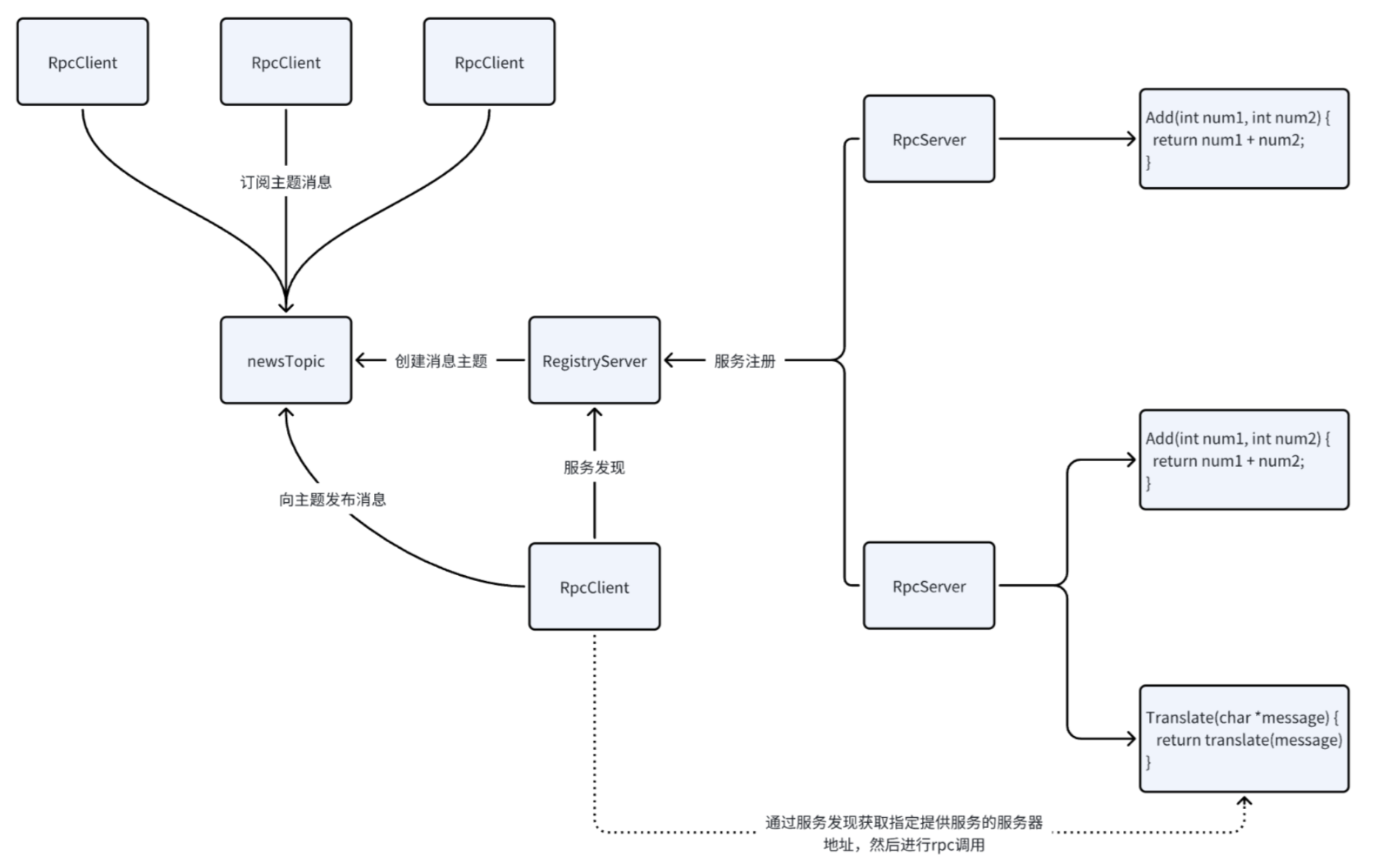
项目主要三个功能:
1.RPC调用
2.服务的注册与发现以及服务的下线上线通知
3.消息的发布订阅
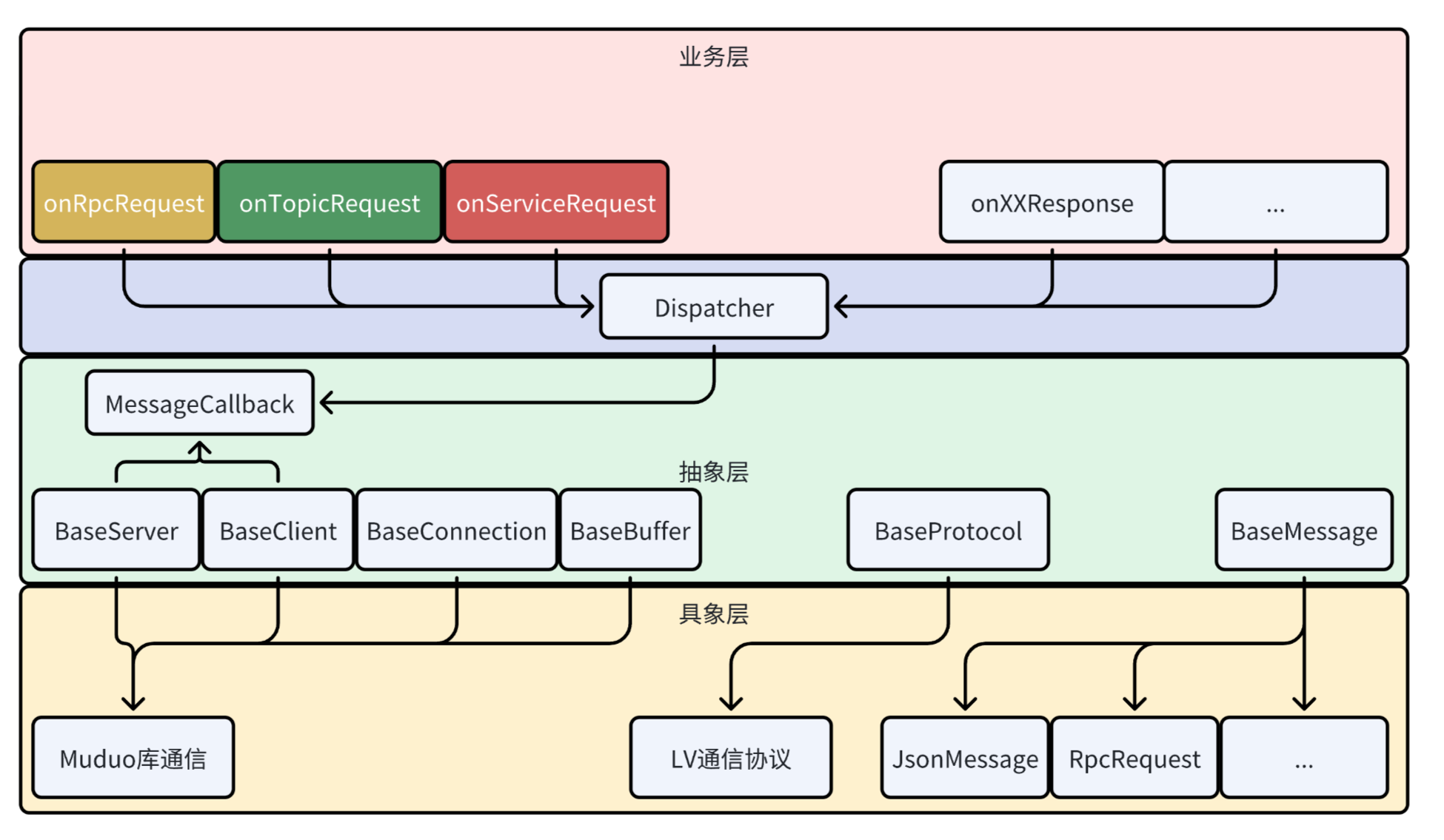
六、框架设计
主要将整个项目分为三层来进行实现
1.抽象层:将底层的网络通信以及应用层协议以及请求响应进行抽象,使项目更具扩展性和灵活性
2.具象层:针对抽象的功能进行具体的实现
3.业务层:基于抽象的框架在上层实现项目所需功能
整体框架设计:
服务端模块划分
首先我们要清楚服务端的功能需求:
1.基于网络通信接收客户端的请求,提供rpc服务
2.基于网络通信接收客户端的请求,提供服务注册与发现,上线下线通知
3.基于网络通信接收客户端的请求,提供主题操作(创建,删除,订阅,取消订阅),消息发布功能
按照功能需求可划分模块
1.Network :网络通信模块
网络通信模块,实现底层的网络通信功能,这个模块的本质上也是一个比较复杂庞大的模块,上面我们也说了,这里使用muduo库来进行搭建
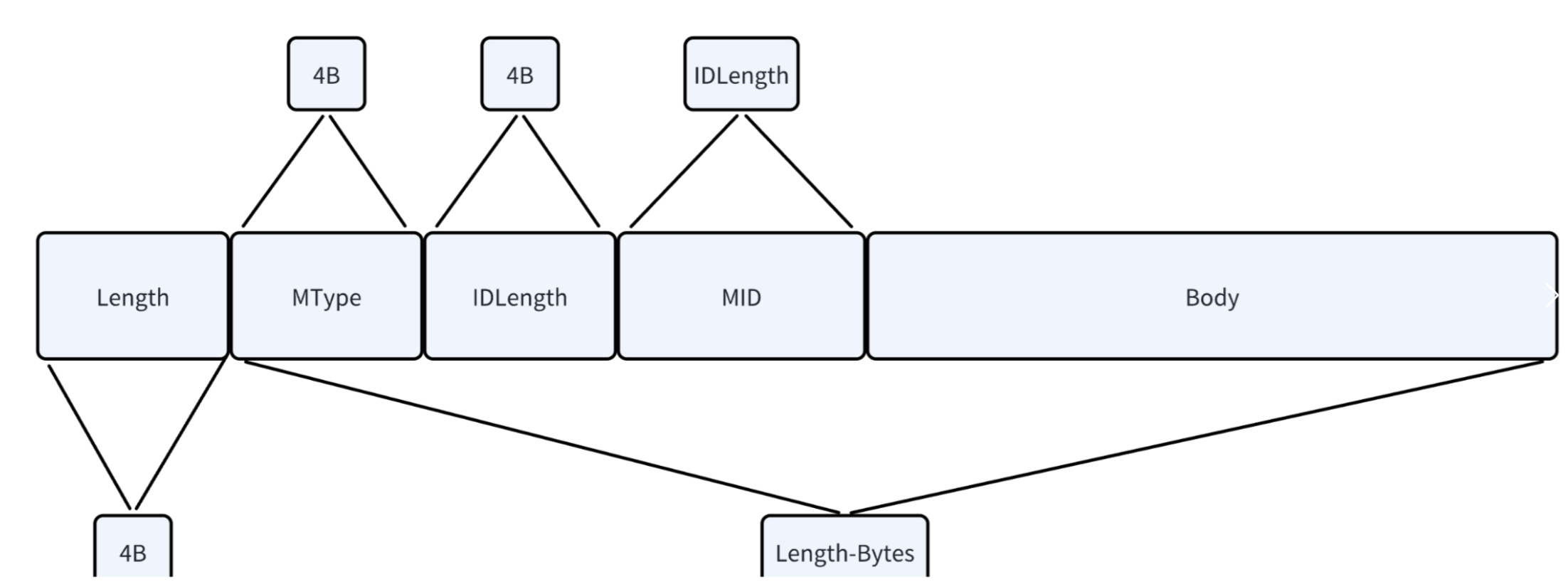
2.Protocol :应用层通信协议模块
应用层通信协议模块存在的意义就是解析数据,解决通信中有可能存在的粘包问题,能够获取到一条完整的消息
我们选取的方式为LV格式
Length:固定为4字节长度,用于表示后续的本条消息数据长度
MType:固定4字节长度,用于表示该条消息的类型
1.rpc调用请求,相应类型消息
2.发布,订阅,取消订阅,消息推送类型消息
3.主题创建,删除类型消息
4.服务注册,发现,上线,下线消息类型
IDLength:固定4字节长度,用于描述后续ID字段的实际长度
MID:用于唯一标识消息,ID字段长度不固定
Body:消息主题正文数据字段,是请求或响应的实际内容字段
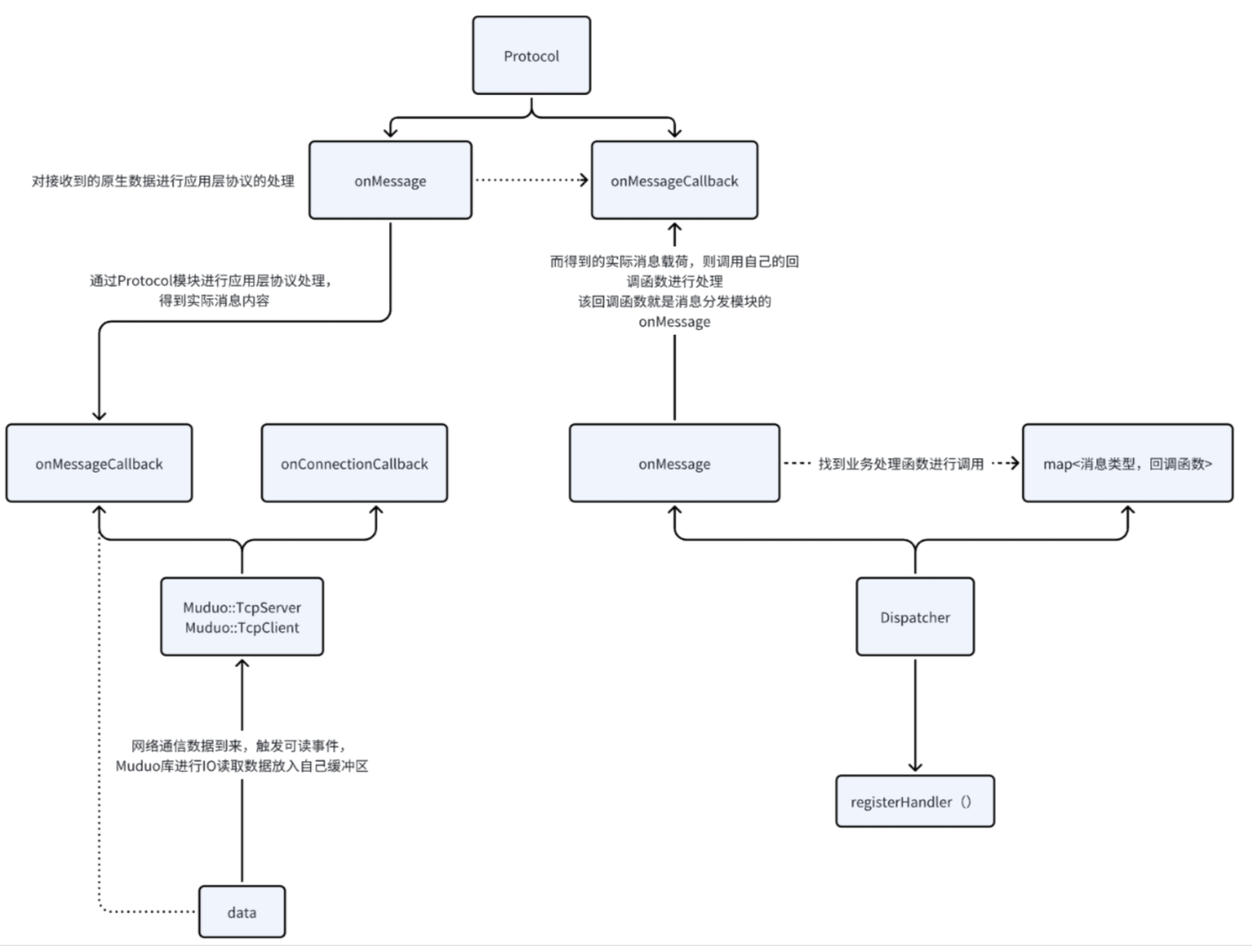
3.Dispatcher : 消息分发处理模块
区分消息类型,根据不同的类型,调用不同的业务处理函数进行消息处理
当在网络通信收到数据后,在onMessage回调函数中对数据进行应用层协议解析,得到一条实际消息载荷后,我们就该决定这条消息代表着客户端的什么请求,以及应该如何处理,本模块主要哈希表来表示消息类型和回调函数的映射关系,即,收到消息后,在模块中找到对应的处理回调函数进行调用即可
消息类型:1.rpc请求与响应 2.服务注册。发现,上线,下线 请求与响应 3. 主题创建,删除,订阅,取消订阅 请求与响应 消息发布的请求与响应
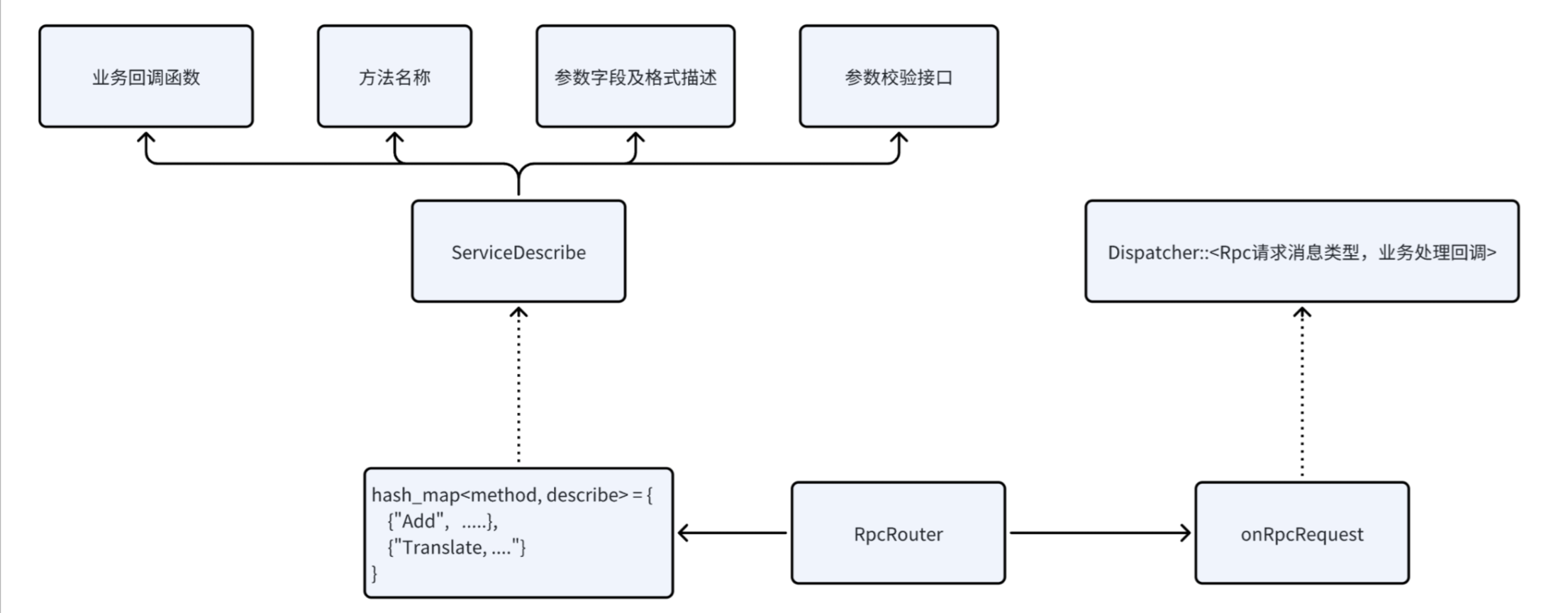
4.RpcRouter : 远端调用路由功能模块
提供rpc请求的处理回调函数,内部所要实现的功能,分辨出客户端请求的服务进行处理得到结果进行响应
1.具备一个rpc路由管理,其中包含对于每个服务的参数校验功能
2.具备一个方法名称和方法业务回调的映射
3.必须向外提供rpc请求的业务处理函数
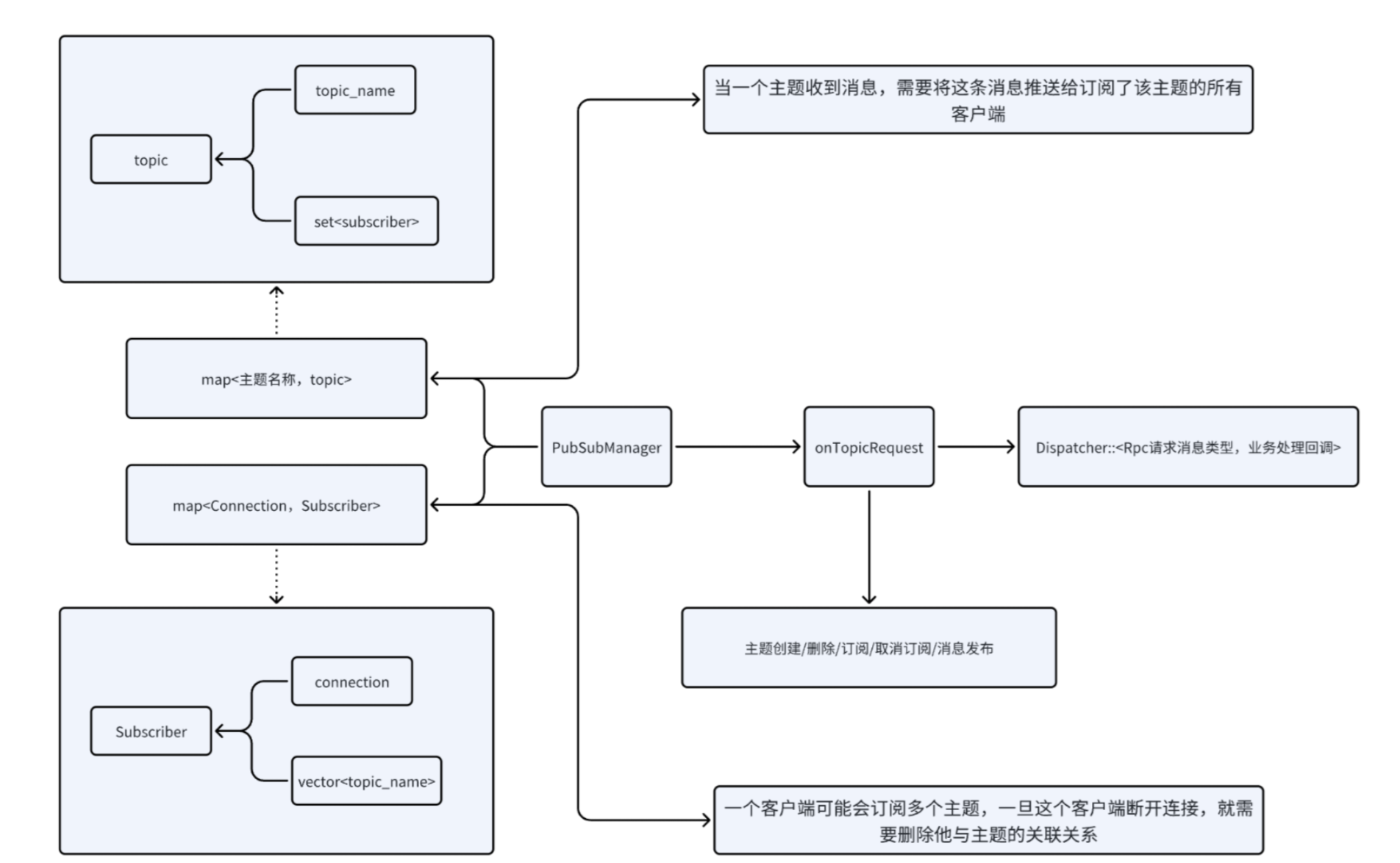
5.Publish---Subscribe :发布订阅功能模块
针对发布订阅请求进行处理,提供一个回调函数设置给Dispatch模块
主题的创建,主题的删除,主题的订阅,主题的取消订阅,主题消息的发布
该模块必须具备一个主题管理,且主题中需要保存订阅了该主题的客户端连接,当主题收到一条消息,需要将这条消息推送给订阅了该主题的所有客户端
必须具备一个订阅者管理,且每个订阅者描述中都必须保存自己所订阅的主题名称,当一个订阅客户端断开连接时,能够找到订阅信息的关联关系,进行删除
必须向外提供 主题创建,销毁,主题订阅,取消订阅,能够找到订阅信息的关联关系,进行删除
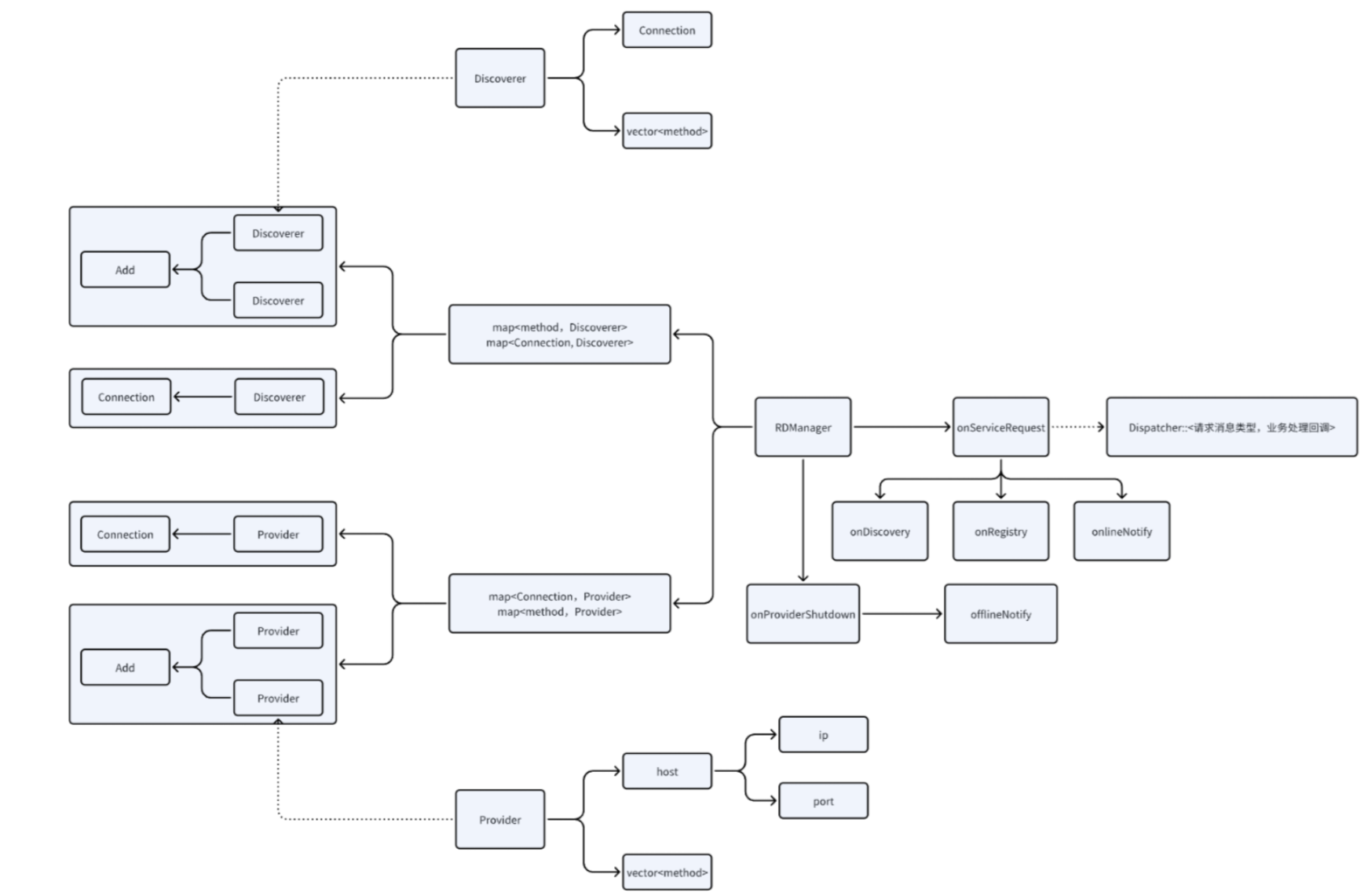
6.Registry---Discovery :服务注册,发现,上线,下线功能模块
针对服务注册与发现请求的处理
1.服务注册:服务provider告诉中转中心,自己能提供哪些服务
2.服务发现:服务caller询问中转中心,谁能提供指定服务
3.服务上线:在一个provider上线了指定服务后,通知发现过该服务的客户端有provider可以提供该服务
4.服务下线:在一个provider断开连接,通知发现过该服务的caller,谁下线了哪个服务
必须具备一个服务发现者的管理:
方法与发现者:当一个客户端进行服务发现的时候,进行记录谁发现过该服务,当有一个新的提供者上线的时 候,可以通知该发现者
连接与发现者:当一个发现者断开连接了,删除关联关系,往后就不需要通知了
必须具备一个服务提供者的管理:
连接与提供者:当一个提供者断开连接的时候,能够通知该提供者提供的服务对应的发现者,该主机的该服务下线了
方法与提供者:能够知道谁的哪些方法下线了,然后通知发现过该方法的客户端
7.Server :基于以上模块整合而出的服务端模块
RpcServer:rpc功能模块与网络通信部分结合
RegistryServer:服务发现注册功能与网络通信部分结合
TopicServer:发布订阅功能模块与网络通信部分结合
客户端模块划分
1.Protocol:应用层通信协议模块
2.Network:网络通信模块
3.Dispatch:消息分发处理模块
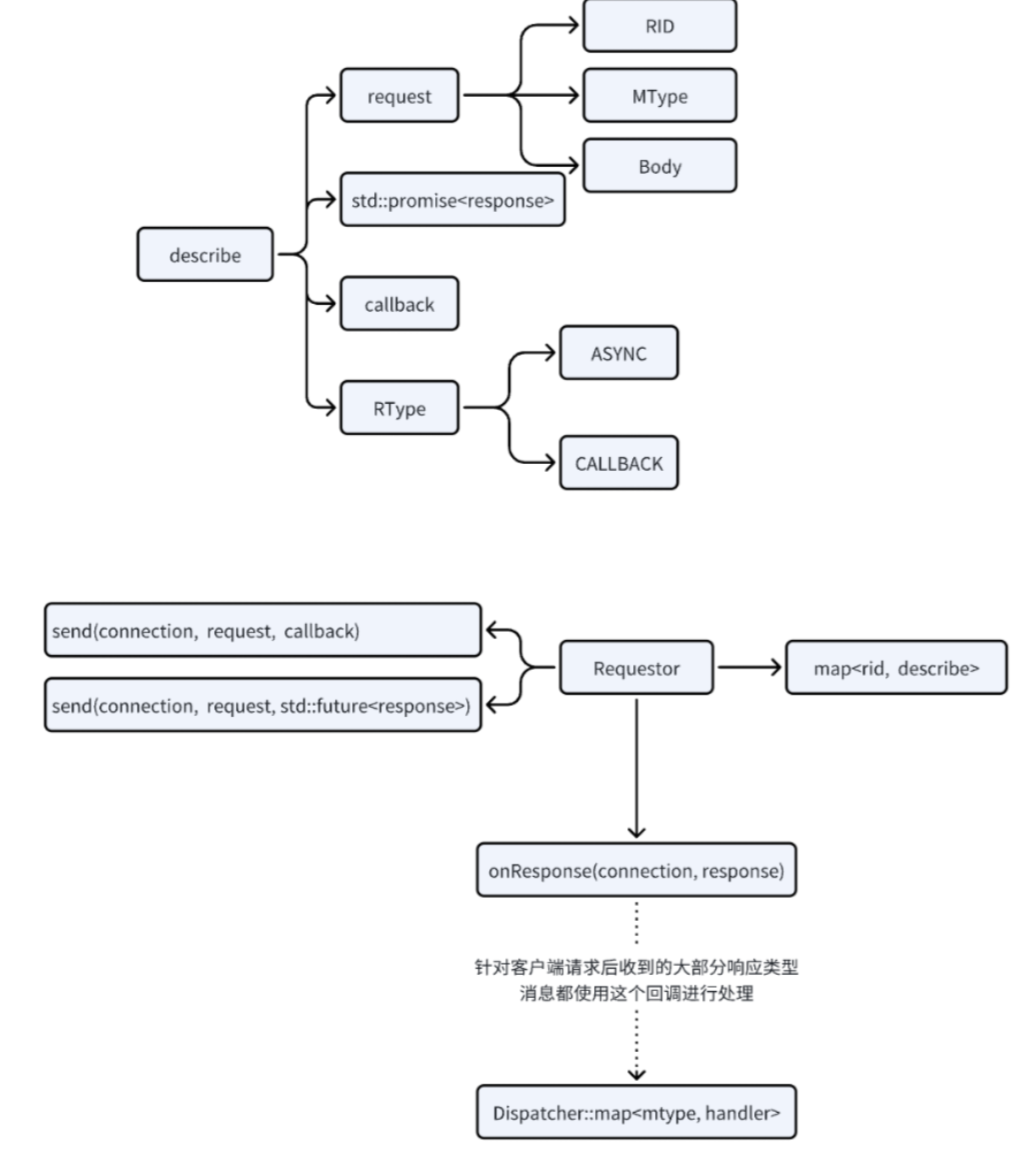
4.Requestor:请求管理模块
5.RpcCaller:远端调用功能模块
6.Publish-Subscribe:发布订阅功能模块
7.Registry-Discovery:服务注册,发现,上线,下线功能模块
8.Client:基于以上模块整合而出的客户端模块
重复模块不再过多赘述
Requestor模块:
针对客户端的每一条请求进行管理,以便于对请求对应的响应做出合适的操作
首先我们要思考一个问题:对于客户端来说,更多的是请求方,是主动发起请求服务的一方,而在多线程网络通信中,可能会存在时序的问题,其次muduo库这种异步IO网络通信库,通常是IO操作都是异步操作,无法直接在发送请求后去等待该条请求的响应
解决办法:给每一个请求设置请求ID,将数据存入hash_map中,以请求ID作为映射,并向外提供获取指定请求ID响应的阻塞接口,这样只要知道的请求ID即可获取到自己想要的响应
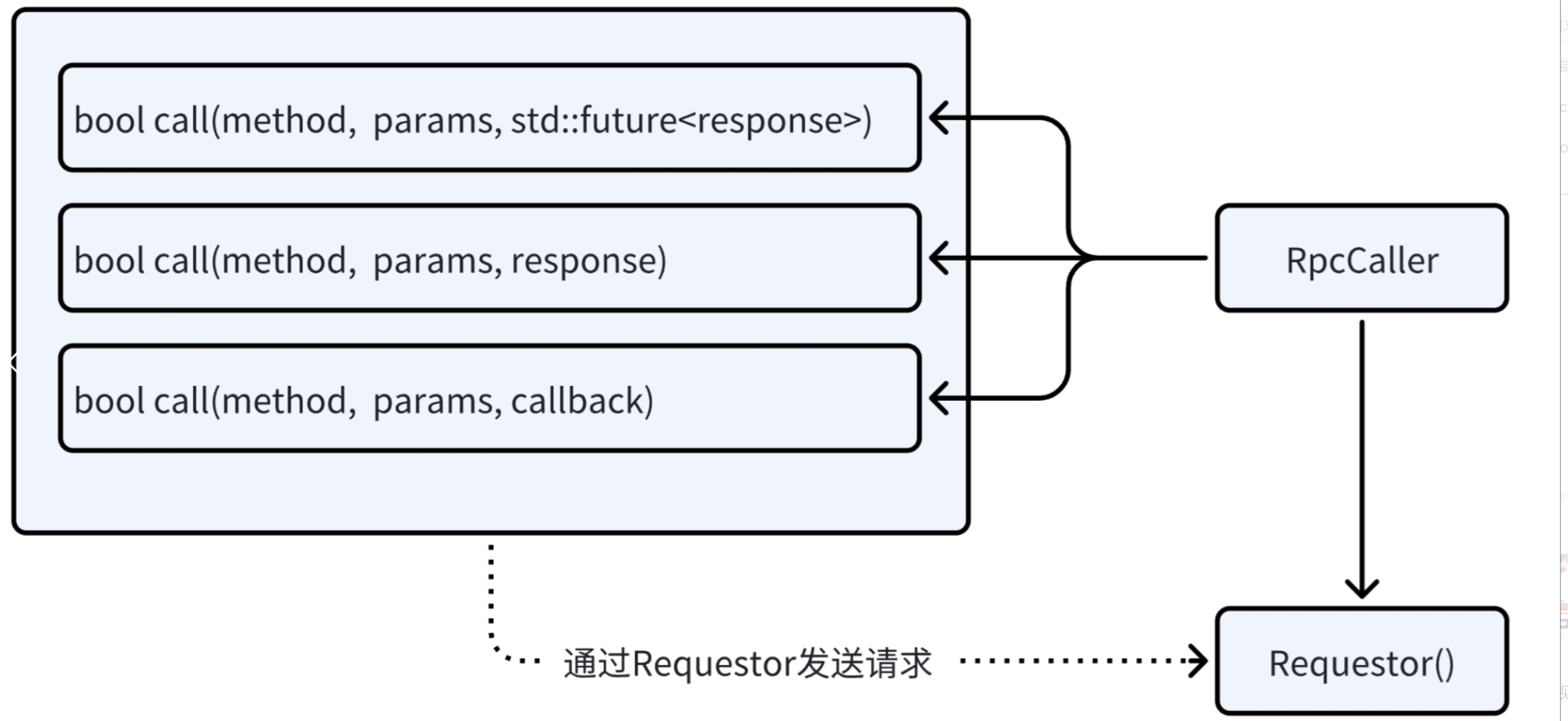
RpcCall模块:
向用户提供进行rpc调用模块
1.同步调用:发起调用后,等收到响应结果后返回
2.异步调用:发起调用后立即返回,在想获取结果的时候进行获取
3.回调调用:发起调用的同事设置结果的处理回调,收到响应后自动对结果进行回调处理
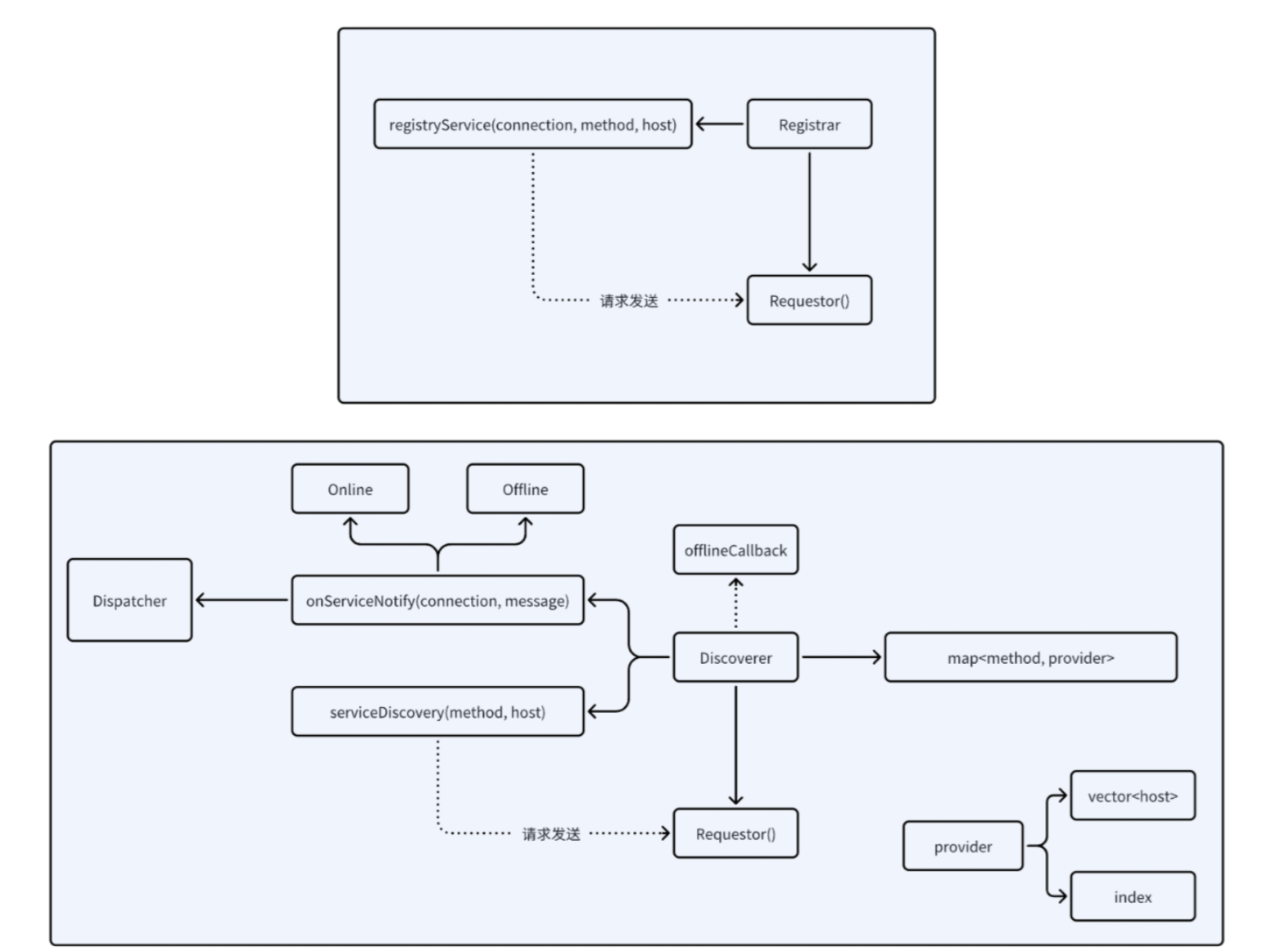
Registry-Discovery模块
注册者:作为Rpc服务的提供者,需要向注册中心提供服务,因为需要实现向服务器注册服务的功能
发现者:作为Rpc服务的调用者,需要先进行服务发现,获取地址后需要管理起来留用,且作为发现者,需要关注注册中心发过来的服务上线/下线消息,及时对已经下线的服务和主机进行管理
Client整合模块:
RegistryClient:服务注册功能模块与网络通信客户端结合
DiscoveryClient:服务发现功能模块与网络通信客户端结合
RpcClient:Discovery 与RPC功能模块与网络通信客户端结合
TopicClient:发布订阅功能模块与网络通信客户端结合
七、项目实现
常用接口实现
日志:
一个项目的实现,日志是必不可少的,主要用来开酥定位程序运行逻辑出错的位置
出现问题不是最可怕的,可怕的是找不到问题出现在哪
cpp
#define LDBG 0
#define LINF 1
#define LERR 2
#define LDEFAULT LDBG
#define LOG(level, format, ...) {\
if (level >= LDEFAULT){\
time_t t = time(NULL);\
struct tm *lt = localtime(&t);\
char time_tmp[32] = {0};\
strftime(time_tmp, 31, "%m-%d %T", lt);\
fprintf(stdout, "[%s][%s:%d] " format "\n", time_tmp, __FILE__, __LINE__, ##__VA_ARGS__);\
}\
}
#define DLOG(format, ...) LOG(LDBG, format, ##__VA_ARGS__);
#define ILOG(format, ...) LOG(LINF, format, ##__VA_ARGS__);
#define ELOG(format, ...) LOG(LERR, format, ##__VA_ARGS__);Json序列化/反序列化
cpp
class JSON {
public:
static bool serialize(const Json::Value &val, std::string &body) {
std::stringstream ss;
//先实例化一个工厂类对象
Json::StreamWriterBuilder swb;
//通过工厂类对象来生产派生类对象
std::unique_ptr<Json::StreamWriter> sw(swb.newStreamWriter());
int ret = sw->write(val, &ss);
if (ret != 0) {
ELOG("json serialize failed!");
return false;
}
body = ss.str();
return true;
}
static bool unserialize(const std::string &body, Json::Value &val) {
Json::CharReaderBuilder crb;
std::string errs;
std::unique_ptr<Json::CharReader> cr(crb.newCharReader());
bool ret = cr->parse(body.c_str(), body.c_str() + body.size(), &val, &errs);
if (ret == false) {
ELOG("json unserialize failed : %s", errs.c_str());
return false;
}
return true;
}
};UUID生成
什么是UUID?UUID也叫通用唯一识别码,通常由32位16进制数字字符组成
8-4-4-4-12
我们采用生成8个随机数字,8个字节序号,16字节数组生成
cpp
class UUID {
public:
static std::string uuid() {
std::stringstream ss;
//1. 构造一个机器随机数对象
std::random_device rd;
//2. 以机器随机数为种子构造伪随机数对象
std::mt19937 generator (rd());
//3. 构造限定数据范围的对象
std::uniform_int_distribution<int> distribution(0, 255);
//4. 生成8个随机数,按照特定格式组织成为16进制数字字符的字符串
for (int i = 0; i < 8; i++) {
if (i == 4 || i == 6) ss << "-";
ss << std::setw(2) << std::setfill('0') <<std::hex << distribution(generator);
}
ss << "-";
//5. 定义一个8字节序号,逐字节组织成为16进制数字字符的字符串
static std::atomic<size_t> seq(1); // 00 00 00 00 00 00 00 01
size_t cur = seq.fetch_add(1);
for (int i = 7; i >= 0; i--) {
if (i == 5) ss << "-";
ss << std::setw(2) << std::setfill('0') << std::hex << ((cur >> (i*8)) & 0xFF);
}
return ss.str();
}定义
1.请求字段宏定义
方法名称 方法参数 主题名称 主题消息 操作类型 IP地址 port端口 响应码 调用结果
cpp
#define KEY_METHOD "method"
#define KEY_PARAMS "parameters"
#define KEY_TOPIC_KEY "topic_key"
#define KEY_TOPIC_MSG "topic_msg"
#define KEY_OPTYPE "optype"
#define KEY_HOST "host"
#define KEY_HOST_IP "ip"
#define KEY_HOST_PORT "port"
#define KEY_RCODE "rcode"
#define KEY_RESULT "result"2.消息类型的定义
PRC 请求,响应
主题操作 请求,响应
服务操作 请求,响应
cpp
enum class MType {
REQ_RPC = 0,
RSP_RPC,
REQ_TOPIC,
RSP_TOPIC,
REQ_SERVICE,
RSP_SERVICE
};3.响应码类型定义
成功处理
解析失败
消息中字段缺失或错误导致无效消息
链接断开
无效的Rpc调用参数
Rpc服务不存在
无效的Topic操作类型
主题不存在
无效的服务操作类型
cpp
enum class RCode {
RCODE_OK = 0,
RCODE_PARSE_FAILED,
RCODE_ERROR_MSGTYPE,
RCODE_INVALID_MSG,
RCODE_DISCONNECTED,
RCODE_INVALID_PARAMS,
RCODE_NOT_FOUND_SERVICE,
RCODE_INVALID_OPTYPE,
RCODE_NOT_FOUND_TOPIC,
RCODE_INTERNAL_ERROR
};
static std::string errReason(RCode code) {
static std::unordered_map<RCode, std::string> err_map = {
{RCode::RCODE_OK, "成功处理!"},
{RCode::RCODE_PARSE_FAILED, "消息解析失败!"},
{RCode::RCODE_ERROR_MSGTYPE, "消息类型错误!"},
{RCode::RCODE_INVALID_MSG, "无效消息"},
{RCode::RCODE_DISCONNECTED, "连接已断开!"},
{RCode::RCODE_INVALID_PARAMS, "无效的Rpc参数!"},
{RCode::RCODE_NOT_FOUND_SERVICE, "没有找到对应的服务!"},
{RCode::RCODE_INVALID_OPTYPE, "无效的操作类型"},
{RCode::RCODE_NOT_FOUND_TOPIC, "没有找到对应的主题!"},
{RCode::RCODE_INTERNAL_ERROR, "内部错误!"}
};
auto it = err_map.find(code);
if (it == err_map.end()) {
return "未知错误!";
}
return it->second;
}4.RPC请求类型定义
同步请求
异步请求
回调请求
cpp
enum class RType {
REQ_ASYNC = 0,
REQ_CALLBACK
};5.主题操作类型定义
主题创建
主题删除
主题订阅
主题取消订阅
主题消息发布
cpp
enum class TopicOptype {
TOPIC_CREATE = 0,
TOPIC_REMOVE,
TOPIC_SUBSCRIBE,
TOPIC_CANCEL,
TOPIC_PUBLISH
};6.服务操作类型定义
服务注册
服务发现
服务上线
服务下线
cpp
enum class ServiceOptype {
SERVICE_REGISTRY = 0,
SERVICE_DISCOVERY,
SERVICE_ONLINE,
SERVICE_OFFLINE,
SERVICE_UNKNOW
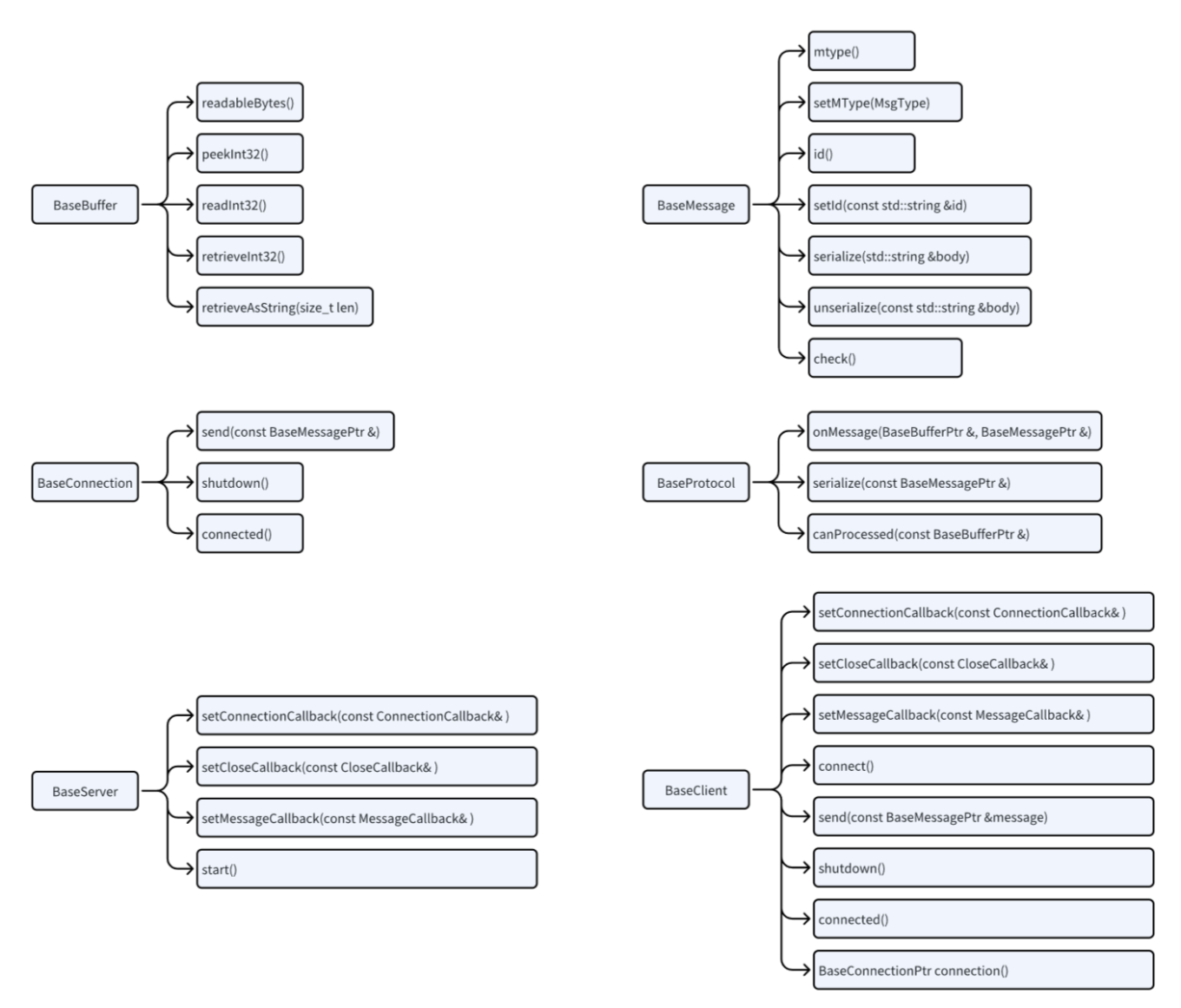
};通信抽象实现
提供一些必要的接口,具体实现由派生类实现
BaseMessage BaseBuffer BaseProtocol BaseConnection BaseServe BaseClient
cpp
namespace myrpc {
class BaseMessage {
public:
using ptr = std::shared_ptr<BaseMessage>;
virtual ~BaseMessage(){}
virtual void setId(const std::string &id) {
_rid = id;
}
virtual std::string rid() { return _rid; }
virtual void setMType(MType mtype) {
_mtype = mtype;
}
virtual MType mtype() { return _mtype; }
virtual std::string serialize() = 0;
virtual bool unserialize(const std::string &msg) = 0;
virtual bool check() = 0;
private:
MType _mtype;
std::string _rid;
};
class BaseBuffer {
public:
using ptr = std::shared_ptr<BaseBuffer>;
virtual size_t readableSize() = 0;
virtual int32_t peekInt32() = 0;
virtual void retrieveInt32() = 0;
virtual int32_t readInt32() = 0;
virtual std::string retrieveAsString(size_t len) = 0;
};
class BaseProtocol {
public:
using ptr = std::shared_ptr<BaseProtocol>;
virtual bool canProcessed(const BaseBuffer::ptr &buf) = 0;
virtual bool onMessage(const BaseBuffer::ptr &buf, BaseMessage::ptr &msg) = 0;
virtual std::string serialize(const BaseMessage::ptr &msg) = 0;
};
class BaseConnection {
public:
using ptr = std::shared_ptr<BaseConnection>;
virtual void send(const BaseMessage::ptr &msg) = 0;
virtual void shutdown() = 0;
virtual bool connected() = 0;
};
using ConnectionCallback = std::function<void(const BaseConnection::ptr&)>;
using CloseCallback = std::function<void(const BaseConnection::ptr&)>;
using MessageCallback = std::function<void(const BaseConnection::ptr&, BaseMessage::ptr&)>;
class BaseServer {
public:
using ptr = std::shared_ptr<BaseServer>;
virtual void setConnectionCallback(const ConnectionCallback& cb) {
_cb_connection = cb;
}
virtual void setCloseCallback(const CloseCallback& cb) {
_cb_close = cb;
}
virtual void setMessageCallback(const MessageCallback& cb) {
_cb_message = cb;
}
virtual void start() = 0;
protected:
ConnectionCallback _cb_connection;
CloseCallback _cb_close;
MessageCallback _cb_message;
};
class BaseClient {
public:
using ptr = std::shared_ptr<BaseClient>;
virtual void setConnectionCallback(const ConnectionCallback& cb) {
_cb_connection = cb;
}
virtual void setCloseCallback(const CloseCallback& cb) {
_cb_close = cb;
}
virtual void setMessageCallback(const MessageCallback& cb) {
_cb_message = cb;
}
virtual void connect() = 0;
virtual void shutdown() = 0;
virtual bool send(const BaseMessage::ptr&) = 0;
virtual BaseConnection::ptr connection() = 0;
virtual bool connected() = 0;
protected:
ConnectionCallback _cb_connection;
CloseCallback _cb_close;
MessageCallback _cb_message;
};
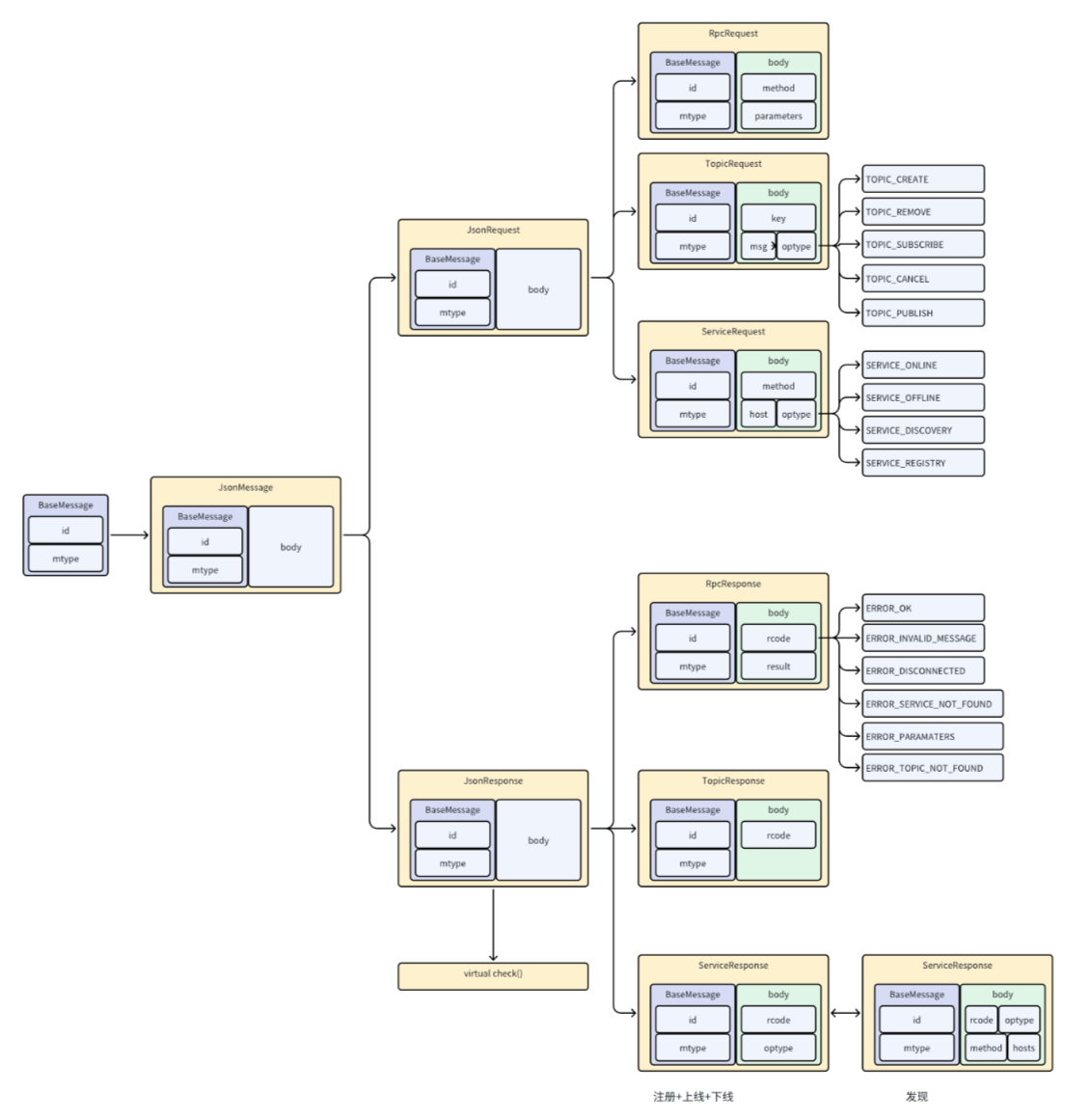
}消息抽象实现
cpp
class JsonMessage : public BaseMessage {
public:
using ptr = std::shared_ptr<JsonMessage>;
virtual std::string serialize() override {
std::string body;
bool ret = JSON::serialize(_body, body);
if (ret == false) {
return std::string();
}
return body;
}
virtual bool unserialize(const std::string &msg) override {
return JSON::unserialize(msg, _body);
}
protected:
Json::Value _body;
};
class JsonRequest : public JsonMessage {
public:
using ptr = std::shared_ptr<JsonRequest>;
};
class JsonResponse : public JsonMessage {
public:
using ptr = std::shared_ptr<JsonResponse>;
virtual bool check() override {
//在响应中,大部分的响应都只有响应状态码
//因此只需要判断响应状态码字段是否存在,类型是否正确即可
if (_body[KEY_RCODE].isNull() == true) {
ELOG("响应中没有响应状态码!");
return false;
}
if (_body[KEY_RCODE].isIntegral() == false) {
ELOG("响应状态码类型错误!");
return false;
}
return true;
}
virtual RCode rcode() {
return (RCode)_body[KEY_RCODE].asInt();
}
virtual void setRCode(RCode rcode) {
_body[KEY_RCODE] = (int)rcode;
}
};Muduo封装实现
cpp
#include <muduo/net/TcpServer.h>
#include <muduo/net/EventLoop.h>
#include <muduo/net/TcpConnection.h>
#include <muduo/net/Buffer.h>
#include <muduo/base/CountDownLatch.h>
#include <muduo/net/EventLoopThread.h>
#include <muduo/net/TcpClient.h>
#include "detail.hpp"
#include "fields.hpp"
#include "abstract.hpp"
#include "message.hpp"
#include <mutex>
#include <unordered_map>
namespace myrpc {
class MuduoBuffer : public BaseBuffer {
public:
using ptr = std::shared_ptr<MuduoBuffer>;
MuduoBuffer(muduo::net::Buffer *buf):_buf(buf){}
virtual size_t readableSize() override {
return _buf->readableBytes();
}
virtual int32_t peekInt32() override {
//muduo库是一个网络库,从缓冲区取出一个4字节整形,会进行网络字节序的转换
return _buf->peekInt32();
}
virtual void retrieveInt32() override {
return _buf->retrieveInt32();
}
virtual int32_t readInt32() override {
return _buf->readInt32();
}
virtual std::string retrieveAsString(size_t len) override {
return _buf->retrieveAsString(len);
}
private:
muduo::net::Buffer *_buf;
};
class BufferFactory {
public:
template<typename ...Args>
static BaseBuffer::ptr create(Args&& ...args) {
return std::make_shared<MuduoBuffer>(std::forward<Args>(args)...);
}
};
class LVProtocol : public BaseProtocol {
public:
// |--Len--|--VALUE--|
// |--Len--|--mtype--|--idlen--|--id--|--body--|
using ptr = std::shared_ptr<LVProtocol>;
//判断缓冲区中的数据量是否足够一条消息的处理
virtual bool canProcessed(const BaseBuffer::ptr &buf) override {
if (buf->readableSize() < lenFieldsLength) {
return false;
}
int32_t total_len = buf->peekInt32();
//DLOG("total_len:%d", total_len);
if (buf->readableSize() < (total_len + lenFieldsLength)) {
return false;
}
return true;
}
virtual bool onMessage(const BaseBuffer::ptr &buf, BaseMessage::ptr &msg) override {
//当调用onMessage的时候,默认认为缓冲区中的数据足够一条完整的消息
int32_t total_len = buf->readInt32(); //读取总长度
MType mtype = (MType)buf->readInt32(); // 读取数据类型
int32_t idlen = buf->readInt32(); // 读取id长度
int32_t body_len = total_len - idlen - idlenFieldsLength - mtypeFieldsLength;
std::string id = buf->retrieveAsString(idlen);
std::string body = buf->retrieveAsString(body_len);
msg = MessageFactory::create(mtype);
if (msg.get() == nullptr) {
ELOG("消息类型错误,构造消息对象失败!");
return false;
}
bool ret = msg->unserialize(body);
if (ret == false) {
ELOG("消息正文反序列化失败!");
return false;
}
msg->setId(id);
msg->setMType(mtype);
return true;
}
virtual std::string serialize(const BaseMessage::ptr &msg) override {
// |--Len--|--mtype--|--idlen--|--id--|--body--|
std::string body = msg->serialize();
std::string id = msg->rid();
auto mtype = htonl((int32_t)msg->mtype());
int32_t idlen = htonl(id.size());
int32_t h_total_len = mtypeFieldsLength + idlenFieldsLength + id.size() + body.size();
int32_t n_total_len = htonl(h_total_len);
//DLOG("h_total_len:%d", h_total_len);
std::string result;
result.reserve(h_total_len);
result.append((char*)&n_total_len, lenFieldsLength);
result.append((char*)&mtype, mtypeFieldsLength);
result.append((char*)&idlen, idlenFieldsLength);
result.append(id);
result.append(body);
return result;
}
private:
const size_t lenFieldsLength = 4;
const size_t mtypeFieldsLength = 4;
const size_t idlenFieldsLength = 4;
};
class ProtocolFactory {
public:
template<typename ...Args>
static BaseProtocol::ptr create(Args&& ...args) {
return std::make_shared<LVProtocol>(std::forward<Args>(args)...);
}
};
class MuduoConnection : public BaseConnection {
public:
using ptr = std::shared_ptr<MuduoConnection>;
MuduoConnection(const muduo::net::TcpConnectionPtr &conn,
const BaseProtocol::ptr &protocol) :
_protocol(protocol), _conn(conn) {}
virtual void send(const BaseMessage::ptr &msg) override {
std::string body = _protocol->serialize(msg);
_conn->send(body);
}
virtual void shutdown() override {
_conn->shutdown();
}
virtual bool connected() override {
_conn->connected();
}
private:
BaseProtocol::ptr _protocol;
muduo::net::TcpConnectionPtr _conn;
};
class ConnectionFactory {
public:
template<typename ...Args>
static BaseConnection::ptr create(Args&& ...args) {
return std::make_shared<MuduoConnection>(std::forward<Args>(args)...);
}
};
class MuduoServer : public BaseServer {
public:
using ptr = std::shared_ptr<MuduoServer>;
MuduoServer(int port) :
_server(&_baseloop, muduo::net::InetAddress("0.0.0.0", port),
"MuduoServer", muduo::net::TcpServer::kReusePort),
_protocol(ProtocolFactory::create()){}
virtual void start() {
_server.setConnectionCallback(std::bind(&MuduoServer::onConnection, this, std::placeholders::_1));
_server.setMessageCallback(std::bind(&MuduoServer::onMessage, this,
std::placeholders::_1, std::placeholders::_2, std::placeholders::_3));
_server.start();//先开始监听
_baseloop.loop();//开始死循环事件监控
}
private:
void onConnection(const muduo::net::TcpConnectionPtr &conn) {
if (conn->connected()) {
std::cout << "连接建立!\n";
auto muduo_conn = ConnectionFactory::create(conn, _protocol);
{
std::unique_lock<std::mutex> lock(_mutex);
_conns.insert(std::make_pair(conn, muduo_conn));
}
if (_cb_connection) _cb_connection(muduo_conn);
}else {
std::cout << "连接断开!\n";
BaseConnection::ptr muduo_conn;
{
std::unique_lock<std::mutex> lock(_mutex);
auto it = _conns.find(conn);
if (it == _conns.end()) {
return;
}
muduo_conn = it->second;
_conns.erase(conn);
}
if (_cb_close) _cb_close(muduo_conn);
}
}
void onMessage(const muduo::net::TcpConnectionPtr &conn, muduo::net::Buffer *buf, muduo::Timestamp){
DLOG("连接有数据到来,开始处理!");
auto base_buf = BufferFactory::create(buf);
while(1) {
if (_protocol->canProcessed(base_buf) == false) {
//数据不足
if (base_buf->readableSize() > maxDataSize) {
conn->shutdown();
ELOG("缓冲区中数据过大!");
return ;
}
//DLOG("数据量不足!");
break;
}
//DLOG("缓冲区中数据可处理!");
BaseMessage::ptr msg;
bool ret = _protocol->onMessage(base_buf, msg);
if (ret == false) {
conn->shutdown();
ELOG("缓冲区中数据错误!");
return ;
}
//DLOG("消息反序列化成功!")
BaseConnection::ptr base_conn;
{
std::unique_lock<std::mutex> lock(_mutex);
auto it = _conns.find(conn);
if (it == _conns.end()) {
conn->shutdown();
return;
}
base_conn = it->second;
}
//DLOG("调用回调函数进行消息处理!");
if (_cb_message) _cb_message(base_conn, msg);
}
}
private:
const size_t maxDataSize = (1 << 16);
BaseProtocol::ptr _protocol;
muduo::net::EventLoop _baseloop;
muduo::net::TcpServer _server;
std::mutex _mutex;
std::unordered_map<muduo::net::TcpConnectionPtr, BaseConnection::ptr> _conns;
};
class ServerFactory {
public:
template<typename ...Args>
static BaseServer::ptr create(Args&& ...args) {
return std::make_shared<MuduoServer>(std::forward<Args>(args)...);
}
};
class MuduoClient : public BaseClient {
public:
using ptr = std::shared_ptr<MuduoClient>;
MuduoClient(const std::string &sip, int sport):
_protocol(ProtocolFactory::create()),
_baseloop(_loopthread.startLoop()),
_downlatch(1),
_client(_baseloop, muduo::net::InetAddress(sip, sport), "MuduoClient"){}
virtual void connect() override {
DLOG("设置回调函数,连接服务器");
_client.setConnectionCallback(std::bind(&MuduoClient::onConnection, this, std::placeholders::_1));
//设置连接消息的回调
_client.setMessageCallback(std::bind(&MuduoClient::onMessage, this,
std::placeholders::_1, std::placeholders::_2, std::placeholders::_3));
//连接服务器
_client.connect();
_downlatch.wait();
DLOG("连接服务器成功!");
}
virtual void shutdown() override {
return _client.disconnect();
}
virtual bool send(const BaseMessage::ptr &msg) override {
if (connected() == false) {
ELOG("连接已断开!");
return false;
}
_conn->send(msg);
}
virtual BaseConnection::ptr connection() override {
return _conn;
}
virtual bool connected() {
return (_conn && _conn->connected());
}
private:
void onConnection(const muduo::net::TcpConnectionPtr &conn) {
if (conn->connected()) {
std::cout << "连接建立!\n";
_downlatch.countDown();//计数--,为0时唤醒阻塞
_conn = ConnectionFactory::create(conn, _protocol);
}else {
std::cout << "连接断开!\n";
_conn.reset();
}
}
void onMessage(const muduo::net::TcpConnectionPtr &conn, muduo::net::Buffer *buf, muduo::Timestamp){
DLOG("连接有数据到来,开始处理!");
auto base_buf = BufferFactory::create(buf);
while(1) {
if (_protocol->canProcessed(base_buf) == false) {
//数据不足
if (base_buf->readableSize() > maxDataSize) {
conn->shutdown();
ELOG("缓冲区中数据过大!");
return ;
}
//DLOG("数据量不足!");
break;
}
//DLOG("缓冲区中数据可处理!");
BaseMessage::ptr msg;
bool ret = _protocol->onMessage(base_buf, msg);
if (ret == false) {
conn->shutdown();
ELOG("缓冲区中数据错误!");
return ;
}
//DLOG("缓冲区中数据解析完毕,调用回调函数进行处理!");
if (_cb_message) _cb_message(_conn, msg);
}
}
private:
const size_t maxDataSize = (1 << 16);
BaseProtocol::ptr _protocol;
BaseConnection::ptr _conn;
muduo::CountDownLatch _downlatch;
muduo::net::EventLoopThread _loopthread;
muduo::net::EventLoop *_baseloop;
muduo::net::TcpClient _client;
};
class ClientFactory {
public:
template<typename ...Args>
static BaseClient::ptr create(Args&& ...args) {
return std::make_shared<MuduoClient>(std::forward<Args>(args)...);
}
};
}不同消息封装实现
Request : Rpc,Topic,Service (继承于JsonReque)
Response:Rpc,Topic,Service (继承于JsonResponse)
cpp
class RpcRequest : public JsonRequest {
public:
using ptr = std::shared_ptr<RpcRequest>;
virtual bool check() override {
//rpc请求中,包含请求方法名称-字符串,参数字段-对象
if (_body[KEY_METHOD].isNull() == true ||
_body[KEY_METHOD].isString() == false) {
ELOG("RPC请求中没有方法名称或方法名称类型错误!");
return false;
}
if (_body[KEY_PARAMS].isNull() == true ||
_body[KEY_PARAMS].isObject() == false) {
ELOG("RPC请求中没有参数信息或参数信息类型错误!");
return false;
}
return true;
}
std::string method() {
return _body[KEY_METHOD].asString();
}
void setMethod(const std::string &method_name) {
_body[KEY_METHOD] = method_name;
}
Json::Value params() {
return _body[KEY_PARAMS];
}
void setParams(const Json::Value ¶ms) {
_body[KEY_PARAMS] = params;
}
};
class TopicRequest : public JsonRequest {
public:
using ptr = std::shared_ptr<TopicRequest>;
virtual bool check() override {
//rpc请求中,包含请求方法名称-字符串,参数字段-对象
if (_body[KEY_TOPIC_KEY].isNull() == true ||
_body[KEY_TOPIC_KEY].isString() == false) {
ELOG("主题请求中没有主题名称或主题名称类型错误!");
return false;
}
if (_body[KEY_OPTYPE].isNull() == true ||
_body[KEY_OPTYPE].isIntegral() == false) {
ELOG("主题请求中没有操作类型或操作类型的类型错误!");
return false;
}
if (_body[KEY_OPTYPE].asInt() == (int)TopicOptype::TOPIC_PUBLISH &&
(_body[KEY_TOPIC_MSG].isNull() == true ||
_body[KEY_TOPIC_MSG].isString() == false)) {
ELOG("主题消息发布请求中没有消息内容字段或消息内容类型错误!");
return false;
}
return true;
}
std::string topicKey() {
return _body[KEY_TOPIC_KEY].asString();
}
void setTopicKey(const std::string &key) {
_body[KEY_TOPIC_KEY] = key;
}
TopicOptype optype() {
return (TopicOptype)_body[KEY_OPTYPE].asInt();
}
void setOptype(TopicOptype optype) {
_body[KEY_OPTYPE] = (int)optype;
}
std::string topicMsg() {
return _body[KEY_TOPIC_MSG].asString();
}
void setTopicMsg(const std::string &msg) {
_body[KEY_TOPIC_MSG] = msg;
}
};
class ServiceRequest : public JsonRequest {
public:
using ptr = std::shared_ptr<ServiceRequest>;
virtual bool check() override {
//rpc请求中,包含请求方法名称-字符串,参数字段-对象
if (_body[KEY_METHOD].isNull() == true ||
_body[KEY_METHOD].isString() == false) {
ELOG("服务请求中没有方法名称或方法名称类型错误!");
return false;
}
if (_body[KEY_OPTYPE].isNull() == true ||
_body[KEY_OPTYPE].isIntegral() == false) {
ELOG("服务请求中没有操作类型或操作类型的类型错误!");
return false;
}
if (_body[KEY_OPTYPE].asInt() != (int)(ServiceOptype::SERVICE_DISCOVERY) &&
(_body[KEY_HOST].isNull() == true ||
_body[KEY_HOST].isObject() == false ||
_body[KEY_HOST][KEY_HOST_IP].isNull() == true ||
_body[KEY_HOST][KEY_HOST_IP].isString() == false ||
_body[KEY_HOST][KEY_HOST_PORT].isNull() == true ||
_body[KEY_HOST][KEY_HOST_PORT].isIntegral() == false)) {
ELOG("服务请求中主机地址信息错误!");
return false;
}
return true;
}
std::string method() {
return _body[KEY_METHOD].asString();
}
void setMethod(const std::string &name) {
_body[KEY_METHOD] = name;
}
ServiceOptype optype() {
return (ServiceOptype)_body[KEY_OPTYPE].asInt();
}
void setOptype(ServiceOptype optype) {
_body[KEY_OPTYPE] = (int)optype;
}
Address host() {
Address addr;
addr.first = _body[KEY_HOST][KEY_HOST_IP].asString();
addr.second = _body[KEY_HOST][KEY_HOST_PORT].asInt();
return addr;
}
void setHost(const Address &host) {
Json::Value val;
val[KEY_HOST_IP] = host.first;
val[KEY_HOST_PORT] = host.second;
_body[KEY_HOST] = val;
}
};
class RpcResponse : public JsonResponse {
public:
using ptr = std::shared_ptr<RpcResponse>;
virtual bool check() override {
if (_body[KEY_RCODE].isNull() == true ||
_body[KEY_RCODE].isIntegral() == false) {
ELOG("响应中没有响应状态码,或状态码类型错误!");
return false;
}
if (_body[KEY_RESULT].isNull() == true) {
ELOG("响应中没有Rpc调用结果,或结果类型错误!");
return false;
}
return true;
}
Json::Value result() {
return _body[KEY_RESULT];
}
void setResult(const Json::Value &result) {
_body[KEY_RESULT] = result;
}
};
class TopicResponse : public JsonResponse {
public:
using ptr = std::shared_ptr<TopicResponse>;
};
class ServiceResponse : public JsonResponse {
public:
using ptr = std::shared_ptr<ServiceResponse>;
virtual bool check() override {
if (_body[KEY_RCODE].isNull() == true ||
_body[KEY_RCODE].isIntegral() == false) {
ELOG("响应中没有响应状态码,或状态码类型错误!");
return false;
}
if (_body[KEY_OPTYPE].isNull() == true ||
_body[KEY_OPTYPE].isIntegral() == false) {
ELOG("响应中没有操作类型,或操作类型的类型错误!");
return false;
}
if (_body[KEY_OPTYPE].asInt() == (int)(ServiceOptype::SERVICE_DISCOVERY) &&
(_body[KEY_METHOD].isNull() == true ||
_body[KEY_METHOD].isString() == false ||
_body[KEY_HOST].isNull() == true ||
_body[KEY_HOST].isArray() == false)) {
ELOG("服务发现响应中响应信息字段错误!");
return false;
}
return true;
}
ServiceOptype optype() {
return (ServiceOptype)_body[KEY_OPTYPE].asInt();
}
void setOptype(ServiceOptype optype) {
_body[KEY_OPTYPE] = (int)optype;
}
std::string method() {
return _body[KEY_METHOD].asString();
}
void setMethod(const std::string &method) {
_body[KEY_METHOD] = method;
}
void setHost(std::vector<Address> addrs) {
for (auto &addr : addrs) {
Json::Value val;
val[KEY_HOST_IP] = addr.first;
val[KEY_HOST_PORT] = addr.second;
_body[KEY_HOST].append(val);
}
}
std::vector<Address> hosts() {
std::vector<Address> addrs;
int sz = _body[KEY_HOST].size();
for (int i = 0; i < sz; i++) {
Address addr;
addr.first = _body[KEY_HOST][i][KEY_HOST_IP].asString();
addr.second = _body[KEY_HOST][i][KEY_HOST_PORT].asInt();
addrs.push_back(addr);
}
return addrs;
}
};我们可以采用工厂模式来生产消息
cpp
class MessageFactory {
public:
static BaseMessage::ptr create(MType mtype) {
switch(mtype) {
case MType::REQ_RPC : return std::make_shared<RpcRequest>();
case MType::RSP_RPC : return std::make_shared<RpcResponse>();
case MType::REQ_TOPIC : return std::make_shared<TopicRequest>();
case MType::RSP_TOPIC : return std::make_shared<TopicResponse>();
case MType::REQ_SERVICE : return std::make_shared<ServiceRequest>();
case MType::RSP_SERVICE : return std::make_shared<ServiceResponse>();
}
return BaseMessage::ptr();
}
template<typename T, typename ...Args>
static std::shared_ptr<T> create(Args&& ...args) {
return std::make_shared<T>(std::forward(args)...);
}
};Dispatcher实现
注册消息类型-回调函数映射关系 提供消息处理接口
cpp
namespace myrpc {
class Callback {
public:
using ptr = std::shared_ptr<Callback>;
virtual void onMessage(const BaseConnection::ptr &conn, BaseMessage::ptr &msg) = 0;
};
template<typename T>
class CallbackT : public Callback{
public:
using ptr = std::shared_ptr<CallbackT<T>>;
using MessageCallback = std::function<void(const BaseConnection::ptr &conn, std::shared_ptr<T> &msg)>;
CallbackT(const MessageCallback &handler):_handler(handler) { }
void onMessage(const BaseConnection::ptr &conn, BaseMessage::ptr &msg) override {
auto type_msg = std::dynamic_pointer_cast<T>(msg);
_handler(conn, type_msg);
}
private:
MessageCallback _handler;
};
class Dispatcher {
public:
using ptr = std::shared_ptr<Dispatcher>;
template<typename T>
void registerHandler(MType mtype, const typename CallbackT<T>::MessageCallback &handler) {
std::unique_lock<std::mutex> lock(_mutex);
auto cb = std::make_shared<CallbackT<T>>(handler);
_handlers.insert(std::make_pair(mtype, cb));
}
void onMessage(const BaseConnection::ptr &conn, BaseMessage::ptr &msg) {
//找到消息类型对应的业务处理函数,进行调用即可
std::unique_lock<std::mutex> lock(_mutex);
auto it = _handlers.find(msg->mtype());
if (it != _handlers.end()) {
return it->second->onMessage(conn, msg);
}
//没有找到指定类型的处理回调--因为客户端和服务端都是我们自己设计的,因此不可能出现这种情况
ELOG("收到未知类型的消息: %d!", msg->mtype());
conn->shutdown();
}
private:
std::mutex _mutex;
std::unordered_map<MType, Callback::ptr> _handlers;
};服务端RpcRouter实现
提供Rpc请求处理回调函数
内部的服务管理:方法名称 参数信息 对外提供参数校验接口
cpp
namespace myrpc {
namespace server {
enum class VType {
BOOL = 0,
INTEGRAL,
NUMERIC,
STRING,
ARRAY,
OBJECT,
};
class ServiceDescribe {
public:
using ptr = std::shared_ptr<ServiceDescribe>;
using ServiceCallback = std::function<void(const Json::Value&, Json::Value &)>;
using ParamsDescribe = std::pair<std::string, VType>;
ServiceDescribe(std::string &&mname, std::vector<ParamsDescribe> &&desc,
VType vtype, ServiceCallback &&handler) :
_method_name(std::move(mname)),_callback(std::move(handler)),
_params_desc(std::move(desc)), _return_type(vtype)
{}
const std::string &method() { return _method_name; }
//针对收到的请求中的参数进行校验
bool paramCheck(const Json::Value ¶ms){
//对params进行参数校验---判断所描述的参数字段是否存在,类型是否一致
for (auto &desc : _params_desc) {
if (params.isMember(desc.first) == false) {
ELOG("参数字段完整性校验失败!%s 字段缺失!", desc.first.c_str());
return false;
}
if (check(desc.second, params[desc.first]) == false) {
ELOG("%s 参数类型校验失败!", desc.first.c_str());
return false;
}
}
return true;
}
bool call(const Json::Value ¶ms, Json::Value &result) {
_callback(params, result);
if (rtypeCheck(result) == false) {
ELOG("回调处理函数中的响应信息校验失败!");
return false;
}
return true;
}
private:
bool rtypeCheck(const Json::Value &val) {
return check(_return_type, val);
}
bool check(VType vtype, const Json::Value &val) {
switch(vtype) {
case VType::BOOL : return val.isBool();
case VType::INTEGRAL : return val.isIntegral();
case VType::NUMERIC : return val.isNumeric();
case VType::STRING : return val.isString();
case VType::ARRAY : return val.isArray();
case VType::OBJECT : return val.isObject();
}
return false;
}
private:
std::string _method_name; // 方法名称
ServiceCallback _callback; // 实际的业务回调函数
std::vector<ParamsDescribe> _params_desc; // 参数字段格式描述
VType _return_type; //结果作为返回值类型的描述
};
class SDescribeFactory {
public:
void setMethodName(const std::string &name) {
_method_name = name;
}
void setReturnType(VType vtype) {
_return_type = vtype;
}
void setParamsDesc(const std::string &pname, VType vtype) {
_params_desc.push_back(ServiceDescribe::ParamsDescribe(pname, vtype));
}
void setCallback(const ServiceDescribe::ServiceCallback &cb) {
_callback = cb;
}
ServiceDescribe::ptr build() {
return std::make_shared<ServiceDescribe>(std::move(_method_name),
std::move(_params_desc), _return_type, std::move(_callback));
}
private:
std::string _method_name;
ServiceDescribe::ServiceCallback _callback; // 实际的业务回调函数
std::vector<ServiceDescribe::ParamsDescribe> _params_desc; // 参数字段格式描述
VType _return_type; //结果作为返回值类型的描述
};
class ServiceManager {
public:
using ptr = std::shared_ptr<ServiceManager>;
void insert(const ServiceDescribe::ptr &desc) {
std::unique_lock<std::mutex> lock(_mutex);
_services.insert(std::make_pair(desc->method(), desc));
}
ServiceDescribe::ptr select(const std::string &method_name) {
std::unique_lock<std::mutex> lock(_mutex);
auto it = _services.find(method_name);
if (it == _services.end()) {
return ServiceDescribe::ptr();
}
return it->second;
}
void remove(const std::string &method_name) {
std::unique_lock<std::mutex> lock(_mutex);
_services.erase(method_name);
}
private:
std::mutex _mutex;
std::unordered_map<std::string, ServiceDescribe::ptr> _services;
};
class RpcRouter {
public:
using ptr = std::shared_ptr<RpcRouter>;
RpcRouter(): _service_manager(std::make_shared<ServiceManager>()){}
//这是注册到Dispatcher模块针对rpc请求进行回调处理的业务函数
void onRpcRequest(const BaseConnection::ptr &conn, RpcRequest::ptr &request){
//1. 查询客户端请求的方法描述--判断当前服务端能否提供对应的服务
auto service = _service_manager->select(request->method());
if (service.get() == nullptr) {
ELOG("%s 服务未找到!", request->method().c_str());
return response(conn, request, Json::Value(), RCode::RCODE_NOT_FOUND_SERVICE);
}
//2. 进行参数校验,确定能否提供服务
if (service->paramCheck(request->params()) == false) {
ELOG("%s 服务参数校验失败!", request->method().c_str());
return response(conn, request, Json::Value(), RCode::RCODE_INVALID_PARAMS);
}
//3. 调用业务回调接口进行业务处理
Json::Value result;
bool ret = service->call(request->params(), result);
if (ret == false) {
ELOG("%s 服务参数校验失败!", request->method().c_str());
return response(conn, request, Json::Value(), RCode::RCODE_INTERNAL_ERROR);
}
//4. 处理完毕得到结果,组织响应,向客户端发送
return response(conn, request, result, RCode::RCODE_OK);
}
void registerMethod(const ServiceDescribe::ptr &service) {
return _service_manager->insert(service);
}
private:
void response(const BaseConnection::ptr &conn,
const RpcRequest::ptr &req,
const Json::Value &res, RCode rcode) {
auto msg = MessageFactory::create<RpcResponse>();
msg->setId(req->rid());
msg->setMType(myrpc::MType::RSP_RPC);
msg->setRCode(rcode);
msg->setResult(res);
conn->send(msg);
}
private:
ServiceManager::ptr _service_manager;
};
}
}服务端 Publish Subscribe实现
对外提供主题操作处理回调函数
对外提供消息发布处理回调函数
内部进行主题及订阅者的管理
cpp
namespace myrpc {
namespace server {
class TopicManager {
public:
using ptr = std::shared_ptr<TopicManager>;
TopicManager() {}
void onTopicRequest(const BaseConnection::ptr &conn, const TopicRequest::ptr &msg) {
TopicOptype topic_optype = msg->optype();
bool ret = true;
switch(topic_optype){
//主题的创建
case TopicOptype::TOPIC_CREATE: topicCreate(conn, msg); break;
//主题的删除
case TopicOptype::TOPIC_REMOVE: topicRemove(conn, msg); break;
//主题的订阅
case TopicOptype::TOPIC_SUBSCRIBE: ret = topicSubscribe(conn, msg); break;
//主题的取消订阅
case TopicOptype::TOPIC_CANCEL: topicCancel(conn, msg); break;
//主题消息的发布
case TopicOptype::TOPIC_PUBLISH: ret = topicPublish(conn, msg); break;
default: return errorResponse(conn, msg, RCode::RCODE_INVALID_OPTYPE);
}
if (!ret) return errorResponse(conn, msg, RCode::RCODE_NOT_FOUND_TOPIC);
return topicResponse(conn, msg);
}
//一个订阅者在连接断开时的处理---删除其关联的数据
void onShutdown(const BaseConnection::ptr &conn) {
//消息发布者断开连接,不需要任何操作; 消息订阅者断开连接需要删除管理数据
//1. 判断断开连接的是否是订阅者,不是的话则直接返回
std::vector<Topic::ptr> topics;
Subscriber::ptr subscriber;
{
std::unique_lock<std::mutex> lock(_mutex);
auto it = _subscribers.find(conn);
if (it == _subscribers.end()) {
return;//断开的连接,不是一个订阅者的连接
}
subscriber = it->second;
//2. 获取到订阅者退出,受影响的主题对象
for (auto &topic_name : subscriber->topics) {
auto topic_it = _topics.find(topic_name);
if (topic_it == _topics.end()) continue;
topics.push_back(topic_it->second);
}
//4. 从订阅者映射信息中,删除订阅者
_subscribers.erase(it);
}
//3. 从受影响的主题对象中,移除订阅者
for (auto &topic : topics) {
topic->removeSubscriber(subscriber);
}
}
private:
void errorResponse(const BaseConnection::ptr &conn, const TopicRequest::ptr &msg, RCode rcode) {
auto msg_rsp = MessageFactory::create<TopicResponse>();
msg_rsp->setId(msg->rid());
msg_rsp->setMType(MType::RSP_TOPIC);
msg_rsp->setRCode(rcode);
conn->send(msg_rsp);
}
void topicResponse(const BaseConnection::ptr &conn, const TopicRequest::ptr &msg) {
auto msg_rsp = MessageFactory::create<TopicResponse>();
msg_rsp->setId(msg->rid());
msg_rsp->setMType(MType::RSP_TOPIC);
msg_rsp->setRCode(RCode::RCODE_OK);
conn->send(msg_rsp);
}
void topicCreate(const BaseConnection::ptr &conn, const TopicRequest::ptr &msg) {
std::unique_lock<std::mutex> lock(_mutex);
//构造一个主题对象,添加映射关系的管理
std::string topic_name = msg->topicKey();
auto topic = std::make_shared<Topic>(topic_name);
_topics.insert(std::make_pair(topic_name, topic));
}
void topicRemove(const BaseConnection::ptr &conn, const TopicRequest::ptr &msg) {
// 1. 查看当前主题,有哪些订阅者,然后从订阅者中将主题信息删除掉
// 2. 删除主题的数据 -- 主题名称与主题对象的映射关系
std::string topic_name = msg->topicKey();
std::unordered_set<Subscriber::ptr> subscribers;
{
std::unique_lock<std::mutex> lock(_mutex);
//在删除主题之前,先找出会受到影响的订阅者
auto it = _topics.find(topic_name);
if (it == _topics.end()) {
return;
}
subscribers = it->second->subscribers;
_topics.erase(it);//删除当前的主题映射关系,
}
for (auto &subscriber : subscribers) {
subscriber->removeTopic(topic_name);
}
}
bool topicSubscribe(const BaseConnection::ptr &conn, const TopicRequest::ptr &msg) {
//1. 先找出主题对象,以及订阅者对象
// 如果没有找到主题--就要报错; 但是如果没有找到订阅者对象,那就要构造一个订阅者
Topic::ptr topic;
Subscriber::ptr subscriber;
{
std::unique_lock<std::mutex> lock(_mutex);
auto topic_it = _topics.find(msg->topicKey());
if (topic_it == _topics.end()) {
return false;
}
topic = topic_it->second;
auto sub_it = _subscribers.find(conn);
if (sub_it != _subscribers.end()) {
subscriber = sub_it->second;
}else {
subscriber = std::make_shared<Subscriber>(conn);
_subscribers.insert(std::make_pair(conn, subscriber));
}
}
//2. 在主题对象中,新增一个订阅者对象关联的连接; 在订阅者对象中新增一个订阅的主题
topic->appendSubscriber(subscriber);
subscriber->appendTopic(msg->topicKey());
return true;
}
void topicCancel(const BaseConnection::ptr &conn, const TopicRequest::ptr &msg) {
//1. 先找出主题对象,和订阅者对象
Topic::ptr topic;
Subscriber::ptr subscriber;
{
std::unique_lock<std::mutex> lock(_mutex);
auto topic_it = _topics.find(msg->topicKey());
if (topic_it != _topics.end()) {
topic = topic_it->second;
}
auto sub_it = _subscribers.find(conn);
if (sub_it != _subscribers.end()) {
subscriber = sub_it->second;
}
}
//2. 从主题对象中删除当前的订阅者连接; 从订阅者信息中删除所订阅的主题名称
if (subscriber) subscriber->removeTopic(msg->topicKey());
if (topic && subscriber) topic->removeSubscriber(subscriber);
}
bool topicPublish(const BaseConnection::ptr &conn, const TopicRequest::ptr &msg) {
Topic::ptr topic;
{
std::unique_lock<std::mutex> lock(_mutex);
auto topic_it = _topics.find(msg->topicKey());
if (topic_it == _topics.end()) {
return false;
}
topic = topic_it->second;
}
topic->pushMessage(msg);
return true;
}
private:
struct Subscriber {
using ptr = std::shared_ptr<Subscriber>;
std::mutex _mutex;
BaseConnection::ptr conn;
std::unordered_set<std::string> topics;//订阅者所订阅的主题名称
Subscriber(const BaseConnection::ptr &c): conn(c) { }
//订阅主题的时候调用
void appendTopic(const std::string &topic_name) {
std::unique_lock<std::mutex> lock(_mutex);
topics.insert(topic_name);
}
//主题被删除 或者 取消订阅的时候,调用
void removeTopic(const std::string &topic_name) {
std::unique_lock<std::mutex> lock(_mutex);
topics.erase(topic_name);
}
};
struct Topic {
using ptr = std::shared_ptr<Topic>;
std::mutex _mutex;
std::string topic_name;
std::unordered_set<Subscriber::ptr> subscribers; //当前主题的订阅者
Topic(const std::string &name) : topic_name(name){}
//新增订阅的时候调用
void appendSubscriber(const Subscriber::ptr &subscriber) {
std::unique_lock<std::mutex> lock(_mutex);
subscribers.insert(subscriber);
}
//取消订阅 或者 订阅者连接断开 的时候调用
void removeSubscriber(const Subscriber::ptr &subscriber) {
std::unique_lock<std::mutex> lock(_mutex);
subscribers.erase(subscriber);
}
//收到消息发布请求的时候调用
void pushMessage(const BaseMessage::ptr &msg) {
std::unique_lock<std::mutex> lock(_mutex);
for (auto &subscriber : subscribers) {
subscriber->conn->send(msg);
}
}
};
private:
std::mutex _mutex;
std::unordered_map<std::string, Topic::ptr> _topics;
std::unordered_map<BaseConnection::ptr, Subscriber::ptr> _subscribers;
};
}
}服务端 Registry Discovery实现
对外提供服务操作(注册,发现)消息处理回调函数
内部进行服务发现者的管理
内部进行服务提供者的管理
cpp
namespace myrpc {
namespace server {
class ProviderManager {
public:
using ptr = std::shared_ptr<ProviderManager>;
struct Provider {
using ptr = std::shared_ptr<Provider>;
std::mutex _mutex;
BaseConnection::ptr conn;
Address host;
std::vector<std::string> methods;
Provider(const BaseConnection::ptr &c, const Address &h):
conn(c), host(h){}
void appendMethod(const std::string &method) {
std::unique_lock<std::mutex> lock(_mutex);
methods.emplace_back(method);
}
};
//当一个新的服务提供者进行服务注册的时候调用
void addProvider(const BaseConnection::ptr &c, const Address &h, const std::string &method) {
Provider::ptr provider;
//查找连接所关联的服务提供者对象,找到则获取,找不到则创建,并建立关联
{
std::unique_lock<std::mutex> lock(_mutex);
auto it = _conns.find(c);
if (it != _conns.end()) {
provider = it->second;
}else {
provider = std::make_shared<Provider>(c, h);
_conns.insert(std::make_pair(c, provider));
}
//method方法的提供主机要多出一个,_providers新增数据
auto &providers = _providers[method];
providers.insert(provider);
}
//向服务对象中新增一个所能提供的服务名称
provider->appendMethod(method);
}
//当一个服务提供者断开连接的时候,获取他的信息--用于进行服务下线通知
Provider::ptr getProvider(const BaseConnection::ptr &c) {
std::unique_lock<std::mutex> lock(_mutex);
auto it = _conns.find(c);
if (it != _conns.end()) {
return it->second;
}
return Provider::ptr();
}
//当一个服务提供者断开连接的时候,删除它的关联信息
void delProvider(const BaseConnection::ptr &c) {
std::unique_lock<std::mutex> lock(_mutex);
auto it = _conns.find(c);
if (it == _conns.end()) {
//当前断开连接的不是一个服务提供者
return;
}
//如果是提供者,看看提供了什么服务,从服务者提供信息中删除当前服务提供者
for (auto & method : it->second->methods) {
auto &providers = _providers[method];
providers.erase(it->second);
}
//删除连接与服务提供者的关联关系
_conns.erase(it);
}
std::vector<Address> methodHosts(const std::string &method) {
std::unique_lock<std::mutex> lock(_mutex);
auto it = _providers.find(method);
if (it == _providers.end()) {
return std::vector<Address>();
}
std::vector<Address> result;
for (auto &provider : it->second) {
result.push_back(provider->host);
}
return result;
}
private:
std::mutex _mutex;
std::unordered_map<std::string, std::set<Provider::ptr>> _providers;
std::unordered_map<BaseConnection::ptr, Provider::ptr> _conns;
};
class DiscovererManager {
public:
using ptr = std::shared_ptr<DiscovererManager>;
struct Discoverer {
using ptr = std::shared_ptr<Discoverer>;
std::mutex _mutex;
BaseConnection::ptr conn; //发现者关联的客户端连接
std::vector<std::string> methods; //发现过的服务名称
Discoverer(const BaseConnection::ptr &c) : conn(c){}
void appendMethod(const std::string &method) {
std::unique_lock<std::mutex> lock(_mutex);
methods.push_back(method);
}
};
//当每次客户端进行服务发现的时候新增发现者,新增服务名称
Discoverer::ptr addDiscoverer(const BaseConnection::ptr &c, const std::string &method) {
Discoverer::ptr discoverer;
{
std::unique_lock<std::mutex> lock(_mutex);
auto it = _conns.find(c);
if (it != _conns.end()) {
discoverer = it->second;
}else {
discoverer = std::make_shared<Discoverer>(c);
_conns.insert(std::make_pair(c, discoverer));
}
auto &discoverers = _discoverers[method];
discoverers.insert(discoverer);
}
discoverer->appendMethod(method);
return discoverer;
}
//发现者客户端断开连接时,找到发现者信息,删除关联数据
void delDiscoverer(const BaseConnection::ptr &c) {
std::unique_lock<std::mutex> lock(_mutex);
auto it = _conns.find(c);
if (it == _conns.end()) {
//没有找到连接对应的发现者信息,代表客户端不是一个服务发现者
return;
}
for (auto &method : it->second->methods) {
auto discoverers = _discoverers[method];
discoverers.erase(it->second);
}
_conns.erase(it);
}
//当有一个新的服务提供者上线,则进行上线通知
void onlineNotify(const std::string &method, const Address &host) {
return notify(method, host, ServiceOptype::SERVICE_ONLINE);
}
//当有一个服务提供者断开连接,则进行下线通知
void offlineNotify(const std::string &method, const Address &host) {
return notify(method, host, ServiceOptype::SERVICE_OFFLINE);
}
private:
void notify(const std::string &method, const Address &host, ServiceOptype optype) {
std::unique_lock<std::mutex> lock(_mutex);
auto it = _discoverers.find(method);
if (it == _discoverers.end()) {
//这代表这个服务当前没有发现者
return;
}
auto msg_req = MessageFactory::create<ServiceRequest>();
msg_req->setId(UUID::uuid());
msg_req->setMType(MType::REQ_SERVICE);
msg_req->setMethod(method);
msg_req->setHost(host);
msg_req->setOptype(optype);
for (auto &discoverer : it->second) {
discoverer->conn->send(msg_req);
}
}
private:
std::mutex _mutex;
std::unordered_map<std::string, std::set<Discoverer::ptr>> _discoverers;
std::unordered_map<BaseConnection::ptr, Discoverer::ptr> _conns;
};
class PDManager {
public:
using ptr = std::shared_ptr<PDManager>;
PDManager():
_providers(std::make_shared<ProviderManager>()),
_discoverers(std::make_shared<DiscovererManager>())
{}
void onServiceRequest(const BaseConnection::ptr &conn, const ServiceRequest::ptr &msg) {
//服务操作请求:服务注册/服务发现/
ServiceOptype optype = msg->optype();
if (optype == ServiceOptype::SERVICE_REGISTRY){
//服务注册:
// 1. 新增服务提供者; 2. 进行服务上线的通知
ILOG("%s:%d 注册服务 %s", msg->host().first.c_str(), msg->host().second, msg->method().c_str());
_providers->addProvider(conn, msg->host(), msg->method());
_discoverers->onlineNotify(msg->method(), msg->host());
return registryResponse(conn, msg);
} else if (optype == ServiceOptype::SERVICE_DISCOVERY){
//服务发现:
// 1. 新增服务发现者
ILOG("客户端要进行 %s 服务发现!", msg->method().c_str());
_discoverers->addDiscoverer(conn, msg->method());
return discoveryResponse(conn, msg);
}else {
ELOG("收到服务操作请求,但是操作类型错误!");
return errorResponse(conn, msg);
}
}
void onConnShutdown(const BaseConnection::ptr &conn) {
auto provider = _providers->getProvider(conn);
if (provider.get() != nullptr) {
ILOG("%s:%d 服务下线", provider->host.first.c_str(), provider->host.second);
for (auto &method : provider->methods) {
_discoverers->offlineNotify(method, provider->host);
}
_providers->delProvider(conn);
}
_discoverers->delDiscoverer(conn);
}
private:
void errorResponse(const BaseConnection::ptr &conn, const ServiceRequest::ptr &msg) {
auto msg_rsp = MessageFactory::create<ServiceResponse>();
msg_rsp->setId(msg->rid());
msg_rsp->setMType(MType::RSP_SERVICE);
msg_rsp->setRCode(RCode::RCODE_INVALID_OPTYPE);
msg_rsp->setOptype(ServiceOptype::SERVICE_UNKNOW);
conn->send(msg_rsp);
}
void registryResponse(const BaseConnection::ptr &conn, const ServiceRequest::ptr &msg) {
auto msg_rsp = MessageFactory::create<ServiceResponse>();
msg_rsp->setId(msg->rid());
msg_rsp->setMType(MType::RSP_SERVICE);
msg_rsp->setRCode(RCode::RCODE_OK);
msg_rsp->setOptype(ServiceOptype::SERVICE_REGISTRY);
conn->send(msg_rsp);
}
void discoveryResponse(const BaseConnection::ptr &conn, const ServiceRequest::ptr &msg) {
auto msg_rsp = MessageFactory::create<ServiceResponse>();
msg_rsp->setId(msg->rid());
msg_rsp->setMType(MType::RSP_SERVICE);
msg_rsp->setOptype(ServiceOptype::SERVICE_DISCOVERY);
std::vector<Address> hosts = _providers->methodHosts(msg->method());
if (hosts.empty()) {
msg_rsp->setRCode(RCode::RCODE_NOT_FOUND_SERVICE);
return conn->send(msg_rsp);
}
msg_rsp->setRCode(RCode::RCODE_OK);
msg_rsp->setMethod(msg->method());
msg_rsp->setHost(hosts);
return conn->send(msg_rsp);
}
private:
ProviderManager::ptr _providers;
DiscovererManager::ptr _discoverers;
};
}
}服务端整合
cpp
namespace myrpc {
namespace server {
//注册中心服务端:只需要针对服务注册与发现请求进行处理即可
class RegistryServer {
public:
using ptr = std::shared_ptr<RegistryServer>;
RegistryServer(int port):
_pd_manager(std::make_shared<PDManager>()),
_dispatcher(std::make_shared<myrpc::Dispatcher>())
{
auto service_cb = std::bind(&PDManager::onServiceRequest, _pd_manager.get(),
std::placeholders::_1, std::placeholders::_2);
_dispatcher->registerHandler<ServiceRequest>(MType::REQ_SERVICE, service_cb);
_server = myrpc::ServerFactory::create(port);
auto message_cb = std::bind(&myrpc::Dispatcher::onMessage, _dispatcher.get(),
std::placeholders::_1, std::placeholders::_2);
_server->setMessageCallback(message_cb);
auto close_cb = std::bind(&RegistryServer::onConnShutdown, this, std::placeholders::_1);
_server->setCloseCallback(close_cb);
}
void start() {
_server->start();
}
private:
void onConnShutdown(const BaseConnection::ptr &conn) {
_pd_manager->onConnShutdown(conn);
}
private:
PDManager::ptr _pd_manager;
Dispatcher::ptr _dispatcher;
BaseServer::ptr _server;
};
class RpcServer {
public:
using ptr = std::shared_ptr<RpcServer>;
//rpc------server端有两套地址信息:
// 1. rpc服务提供端地址信息--必须是rpc服务器对外访问地址(云服务器---监听地址和访问地址不同)
// 2. 注册中心服务端地址信息 -- 启用服务注册后,连接注册中心进行服务注册用的
RpcServer(const Address &access_addr,
bool enableRegistry = false,
const Address ®istry_server_addr = Address()):
_enableRegistry(enableRegistry),
_access_addr(access_addr),
_router(std::make_shared<myrpc::server::RpcRouter>()),
_dispatcher(std::make_shared<myrpc::Dispatcher>()) {
if (enableRegistry) {
_reg_client = std::make_shared<client::RegistryClient>(
registry_server_addr.first, registry_server_addr.second);
}
//当前成员server是一个rpcserver,用于提供rpc服务的
auto rpc_cb = std::bind(&RpcRouter::onRpcRequest, _router.get(),
std::placeholders::_1, std::placeholders::_2);
_dispatcher->registerHandler<myrpc::RpcRequest>(myrpc::MType::REQ_RPC, rpc_cb);
_server = myrpc::ServerFactory::create(access_addr.second);
auto message_cb = std::bind(&myrpc::Dispatcher::onMessage, _dispatcher.get(),
std::placeholders::_1, std::placeholders::_2);
_server->setMessageCallback(message_cb);
}
void registerMethod(const ServiceDescribe::ptr &service) {
if (_enableRegistry) {
_reg_client->registryMethod(service->method(), _access_addr);
}
_router->registerMethod(service);
}
void start() {
_server->start();
}
private:
bool _enableRegistry;
Address _access_addr;
client::RegistryClient::ptr _reg_client;
RpcRouter::ptr _router;
Dispatcher::ptr _dispatcher;
BaseServer::ptr _server;
};
class TopicServer {
public:
using ptr = std::shared_ptr<TopicServer>;
TopicServer(int port):
_topic_manager(std::make_shared<TopicManager>()),
_dispatcher(std::make_shared<myrpc::Dispatcher>())
{
auto topic_cb = std::bind(&TopicManager::onTopicRequest, _topic_manager.get(),
std::placeholders::_1, std::placeholders::_2);
_dispatcher->registerHandler<TopicRequest>(MType::REQ_TOPIC, topic_cb);
_server = myrpc::ServerFactory::create(port);
auto message_cb = std::bind(&myrpc::Dispatcher::onMessage, _dispatcher.get(),
std::placeholders::_1, std::placeholders::_2);
_server->setMessageCallback(message_cb);
auto close_cb = std::bind(&TopicServer::onConnShutdown, this, std::placeholders::_1);
_server->setCloseCallback(close_cb);
}
void start() {
_server->start();
}
private:
void onConnShutdown(const BaseConnection::ptr &conn) {
_topic_manager->onShutdown(conn);
}
private:
TopicManager::ptr _topic_manager;
Dispatcher::ptr _dispatcher;
BaseServer::ptr _server;
};
}
}客户端Requestor实现
提供发送请求的接口
内部进行请求 响应的管理
cpp
namespace myrpc {
namespace client {
class Requestor {
public:
using ptr = std::shared_ptr<Requestor>;
using RequestCallback = std::function<void(const BaseMessage::ptr&)>;
using AsyncResponse = std::future<BaseMessage::ptr>;
struct RequestDescribe {
using ptr = std::shared_ptr<RequestDescribe>;
BaseMessage::ptr request;
RType rtype;
std::promise<BaseMessage::ptr> response;
RequestCallback callback;
};
void onResponse(const BaseConnection::ptr &conn, BaseMessage::ptr &msg){
std::string rid = msg->rid();
RequestDescribe::ptr rdp = getDescribe(rid);
if (rdp.get() == nullptr) {
ELOG("收到响应 - %s,但是未找到对应的请求描述!", rid.c_str());
return;
}
if (rdp->rtype == RType::REQ_ASYNC) {
rdp->response.set_value(msg);
}else if (rdp->rtype == RType::REQ_CALLBACK){
if (rdp->callback) rdp->callback(msg);
}else {
ELOG("请求类型未知!!");
}
delDescribe(rid);
}
bool send(const BaseConnection::ptr &conn, const BaseMessage::ptr &req, AsyncResponse &async_rsp) {
RequestDescribe::ptr rdp = newDescribe(req, RType::REQ_ASYNC);
if (rdp.get() == nullptr) {
ELOG("构造请求描述对象失败!");
return false;
}
conn->send(req);
async_rsp = rdp->response.get_future();
return true;
}
bool send(const BaseConnection::ptr &conn, const BaseMessage::ptr &req, BaseMessage::ptr &rsp) {
AsyncResponse rsp_future;
bool ret = send(conn, req, rsp_future);
if (ret == false) {
return false;
}
rsp = rsp_future.get();
return true;
}
bool send(const BaseConnection::ptr &conn, const BaseMessage::ptr &req, const RequestCallback &cb) {
RequestDescribe::ptr rdp = newDescribe(req, RType::REQ_CALLBACK, cb);
if (rdp.get() == nullptr) {
ELOG("构造请求描述对象失败!");
return false;
}
conn->send(req);
return true;
}
private:
RequestDescribe::ptr newDescribe(const BaseMessage::ptr &req, RType rtype,
const RequestCallback &cb = RequestCallback()) {
std::unique_lock<std::mutex> lock(_mutex);
RequestDescribe::ptr rd = std::make_shared<RequestDescribe>();
rd->request = req;
rd->rtype = rtype;
if (rtype == RType::REQ_CALLBACK && cb) {
rd->callback = cb;
}
_request_desc.insert(std::make_pair(req->rid(), rd));
return rd;
}
RequestDescribe::ptr getDescribe(const std::string &rid) {
std::unique_lock<std::mutex> lock(_mutex);
auto it = _request_desc.find(rid);
if (it == _request_desc.end()) {
return RequestDescribe::ptr();
}
return it->second;
}
void delDescribe(const std::string &rid) {
std::unique_lock<std::mutex> lock(_mutex);
_request_desc.erase(rid);
}
private:
std::mutex _mutex;
std::unordered_map<std::string, RequestDescribe::ptr> _request_desc;
};
}
}客户端 RpcCaller实现
cpp
namespace myrpc {
namespace client {
class RpcCaller {
public:
using ptr = std::shared_ptr<RpcCaller>;
using JsonAsyncResponse = std::future<Json::Value>;
using JsonResponseCallback = std::function<void(const Json::Value&)>;
RpcCaller(const Requestor::ptr &requestor): _requestor(requestor){}
//requestor中的处理是针对BaseMessage进行处理的
//用于在rpccaller中针对结果的处理是针对 RpcResponse里边的result进行的
bool call(const BaseConnection::ptr &conn, const std::string &method,
const Json::Value ¶ms, Json::Value &result) {
DLOG("开始同步rpc调用...");
//1. 组织请求
auto req_msg = MessageFactory::create<RpcRequest>();
req_msg->setId(UUID::uuid());
req_msg->setMType(MType::REQ_RPC);
req_msg->setMethod(method);
req_msg->setParams(params);
BaseMessage::ptr rsp_msg;
//2. 发送请求
bool ret = _requestor->send(conn, std::dynamic_pointer_cast<BaseMessage>(req_msg), rsp_msg);
if (ret == false) {
ELOG("同步Rpc请求失败!");
return false;
}
DLOG("收到响应,进行解析,获取结果!");
//3. 等待响应
auto rpc_rsp_msg = std::dynamic_pointer_cast<RpcResponse>(rsp_msg);
if (!rpc_rsp_msg) {
ELOG("rpc响应,向下类型转换失败!");
return false;
}
if (rpc_rsp_msg->rcode() != RCode::RCODE_OK) {
ELOG("rpc请求出错:%s", errReason(rpc_rsp_msg->rcode()));
return false;
}
result = rpc_rsp_msg->result();
DLOG("结果设置完毕!");
return true;
}
bool call(const BaseConnection::ptr &conn, const std::string &method,
const Json::Value ¶ms, JsonAsyncResponse &result) {
//向服务器发送异步回调请求,设置回调函数,回调函数中会传入一个promise对象,在回调函数中去堆promise设置数据
auto req_msg = MessageFactory::create<RpcRequest>();
req_msg->setId(UUID::uuid());
req_msg->setMType(MType::REQ_RPC);
req_msg->setMethod(method);
req_msg->setParams(params);
auto json_promise = std::make_shared<std::promise<Json::Value>>() ;
result = json_promise->get_future();
Requestor::RequestCallback cb = std::bind(&RpcCaller::Callback,
this, json_promise, std::placeholders::_1);
bool ret = _requestor->send(conn, std::dynamic_pointer_cast<BaseMessage>(req_msg), cb);
if (ret == false) {
ELOG("异步Rpc请求失败!");
return false;
}
return true;
}
bool call(const BaseConnection::ptr &conn, const std::string &method,
const Json::Value ¶ms, const JsonResponseCallback &cb) {
auto req_msg = MessageFactory::create<RpcRequest>();
req_msg->setId(UUID::uuid());
req_msg->setMType(MType::REQ_RPC);
req_msg->setMethod(method);
req_msg->setParams(params);
Requestor::RequestCallback req_cb = std::bind(&RpcCaller::Callback1,
this, cb, std::placeholders::_1);
bool ret = _requestor->send(conn, std::dynamic_pointer_cast<BaseMessage>(req_msg), req_cb);
if (ret == false) {
ELOG("回调Rpc请求失败!");
return false;
}
return true;
}
private:
void Callback1(const JsonResponseCallback &cb, const BaseMessage::ptr &msg) {
auto rpc_rsp_msg = std::dynamic_pointer_cast<RpcResponse>(msg);
if (!rpc_rsp_msg) {
ELOG("rpc响应,向下类型转换失败!");
return ;
}
if (rpc_rsp_msg->rcode() != RCode::RCODE_OK) {
ELOG("rpc回调请求出错:%s", errReason(rpc_rsp_msg->rcode()));
return ;
}
cb(rpc_rsp_msg->result());
}
void Callback(std::shared_ptr<std::promise<Json::Value>> result, const BaseMessage::ptr &msg) {
auto rpc_rsp_msg = std::dynamic_pointer_cast<RpcResponse>(msg);
if (!rpc_rsp_msg) {
ELOG("rpc响应,向下类型转换失败!");
return ;
}
if (rpc_rsp_msg->rcode() != RCode::RCODE_OK) {
ELOG("rpc异步请求出错:%s", errReason(rpc_rsp_msg->rcode()));
return ;
}
result->set_value(rpc_rsp_msg->result());
}
private:
Requestor::ptr _requestor;
};
}
}客户端 Publish Subscribe实现
提供消息发布接口
提供主题操作接口
内部进行主题及订阅者的管理
cpp
namespace myrpc {
namespace client {
class TopicManager {
public:
using SubCallback = std::function<void(const std::string &key, const std::string &msg)>;
using ptr = std::shared_ptr<TopicManager>;
TopicManager(const Requestor::ptr &requestor) : _requestor(requestor) {}
bool create(const BaseConnection::ptr &conn, const std::string &key) {
return commonRequest(conn, key, TopicOptype::TOPIC_CREATE);
}
bool remove(const BaseConnection::ptr &conn, const std::string &key) {
return commonRequest(conn, key, TopicOptype::TOPIC_REMOVE);
}
bool subscribe(const BaseConnection::ptr &conn, const std::string &key, const SubCallback &cb) {
addSubscribe(key, cb);
bool ret = commonRequest(conn, key, TopicOptype::TOPIC_SUBSCRIBE);
if (ret == false) {
delSubscribe(key);
return false;
}
return true;
}
bool cancel(const BaseConnection::ptr &conn, const std::string &key) {
delSubscribe(key);
return commonRequest(conn, key, TopicOptype::TOPIC_CANCEL);
}
bool publish(const BaseConnection::ptr &conn, const std::string &key, const std::string &msg) {
return commonRequest(conn, key, TopicOptype::TOPIC_PUBLISH, msg);
}
void onPublish(const BaseConnection::ptr &conn, const TopicRequest::ptr &msg) {
//1. 从消息中取出操作类型进行判断,是否是消息请求
auto type = msg->optype();
if (type != TopicOptype::TOPIC_PUBLISH) {
ELOG("收到了错误类型的主题操作!");
return ;
}
//2. 取出消息主题名称,以及消息内容
std::string topic_key = msg->topicKey();
std::string topic_msg = msg->topicMsg();
//3. 通过主题名称,查找对应主题的回调处理函数,有在处理,无在报错
auto callback = getSubscribe(topic_key);
if (!callback) {
ELOG("收到了 %s 主题消息,但是该消息无主题处理回调!", topic_key.c_str());
return ;
}
return callback(topic_key, topic_msg);
}
private:
void addSubscribe(const std::string &key, const SubCallback &cb) {
std::unique_lock<std::mutex> lock(_mutex);
_topic_callbacks.insert(std::make_pair(key, cb));
}
void delSubscribe(const std::string &key) {
std::unique_lock<std::mutex> lock(_mutex);
_topic_callbacks.erase(key);
}
const SubCallback getSubscribe(const std::string &key) {
std::unique_lock<std::mutex> lock(_mutex);
auto it = _topic_callbacks.find(key);
if (it == _topic_callbacks.end()) {
return SubCallback();
}
return it->second;
}
bool commonRequest(const BaseConnection::ptr &conn, const std::string &key,
TopicOptype type, const std::string &msg = "") {
//1. 构造请求对象,并填充数据
auto msg_req = MessageFactory::create<TopicRequest>();
msg_req->setId(UUID::uuid());
msg_req->setMType(MType::REQ_TOPIC);
msg_req->setOptype(type);
msg_req->setTopicKey(key);
if (type == TopicOptype::TOPIC_PUBLISH) {
msg_req->setTopicMsg(msg);
}
//2. 向服务端发送请求,等待响应
BaseMessage::ptr msg_rsp;
bool ret = _requestor->send(conn, msg_req, msg_rsp);
if (ret == false) {
ELOG("主题操作请求失败!");
return false;
}
//3. 判断请求处理是否成功
auto topic_rsp_msg = std::dynamic_pointer_cast<TopicResponse>(msg_rsp);
if (!topic_rsp_msg) {
ELOG("主题操作响应,向下类型转换失败!");
return false;
}
if (topic_rsp_msg->rcode() != RCode::RCODE_OK) {
ELOG("主题操作请求出错:%s", errReason(topic_rsp_msg->rcode()));
return false;
}
return true;
}
private:
std::mutex _mutex;
std::unordered_map<std::string, SubCallback> _topic_callbacks;
Requestor::ptr _requestor;
};
}
}客户端Registry Discovery 实现
提供服务发现接口
提供服务注册接口
提供服务上线下线操作,通知处理回调函数
内部进行发现的服务与主机信息管理
cpp
namespace myrpc {
namespace client {
class Provider {
public:
using ptr = std::shared_ptr<Provider>;
Provider(const Requestor::ptr &requestor) : _requestor(requestor){}
bool registryMethod(const BaseConnection::ptr &conn, const std::string &method, const Address &host) {
auto msg_req = MessageFactory::create<ServiceRequest>();
msg_req->setId(UUID::uuid());
msg_req->setMType(MType::REQ_SERVICE);
msg_req->setMethod(method);
msg_req->setHost(host);
msg_req->setOptype(ServiceOptype::SERVICE_REGISTRY);
BaseMessage::ptr msg_rsp;
bool ret = _requestor->send(conn, msg_req, msg_rsp);
if (ret == false) {
ELOG("%s 服务注册失败!", method.c_str());
return false;
}
auto service_rsp = std::dynamic_pointer_cast<ServiceResponse>(msg_rsp);
if (service_rsp.get() == nullptr) {
ELOG("响应类型向下转换失败!");
return false;
}
if (service_rsp->rcode() != RCode::RCODE_OK) {
ELOG("服务注册失败,原因:%s", errReason(service_rsp->rcode()).c_str());
return false;
}
return true;
}
private:
Requestor::ptr _requestor;
};
class MethodHost {
public:
using ptr = std::shared_ptr<MethodHost>;
MethodHost(): _idx(0){}
MethodHost(const std::vector<Address> &hosts):
_hosts(hosts.begin(), hosts.end()), _idx(0){}
void appendHost(const Address &host) {
//中途收到了服务上线请求后被调用
std::unique_lock<std::mutex> lock(_mutex);
_hosts.push_back(host);
}
void removeHost(const Address &host) {
//中途收到了服务下线请求后被调用
std::unique_lock<std::mutex> lock(_mutex);
for (auto it = _hosts.begin(); it != _hosts.end(); ++it) {
if (*it == host) {
_hosts.erase(it);
break;
}
}
}
Address chooseHost() {
std::unique_lock<std::mutex> lock(_mutex);
size_t pos = _idx++ % _hosts.size();
return _hosts[pos];
}
bool empty() {
std::unique_lock<std::mutex> lock(_mutex);
return _hosts.empty();
}
private:
std::mutex _mutex;
size_t _idx;
std::vector<Address> _hosts;
};
class Discoverer {
public:
using OfflineCallback = std::function<void(const Address&)>;
using ptr = std::shared_ptr<Discoverer>;
Discoverer(const Requestor::ptr &requestor, const OfflineCallback &cb) :
_requestor(requestor), _offline_callback(cb){}
bool serviceDiscovery(const BaseConnection::ptr &conn, const std::string &method, Address &host) {
{
//当前所保管的提供者信息存在,则直接返回地址
std::unique_lock<std::mutex> lock(_mutex);
auto it = _method_hosts.find(method);
if (it != _method_hosts.end()) {
if (it->second->empty() == false) {
host = it->second->chooseHost();
return true;
}
}
}
//当前服务的提供者为空
auto msg_req = MessageFactory::create<ServiceRequest>();
msg_req->setId(UUID::uuid());
msg_req->setMType(MType::REQ_SERVICE);
msg_req->setMethod(method);
msg_req->setOptype(ServiceOptype::SERVICE_DISCOVERY);
BaseMessage::ptr msg_rsp;
bool ret = _requestor->send(conn, msg_req, msg_rsp);
if (ret == false) {
ELOG("服务发现失败!");
return false;
}
auto service_rsp = std::dynamic_pointer_cast<ServiceResponse>(msg_rsp);
if (!service_rsp) {
ELOG("服务发现失败!响应类型转换失败!");
return false;
}
if (service_rsp->rcode() != RCode::RCODE_OK) {
ELOG("服务发现失败!%s", errReason(service_rsp->rcode()).c_str());
return false;
}
//能走到这里,代表当前是没有对应的服务提供主机的
std::unique_lock<std::mutex> lock(_mutex);
auto method_host = std::make_shared<MethodHost>(service_rsp->hosts());
if (method_host->empty()) {
ELOG("%s 服务发现失败!没有能够提供服务的主机!", method.c_str());
return false;
}
host = method_host->chooseHost();
_method_hosts[method] = method_host;
return true;
}
//这个接口是提供给Dispatcher模块进行服务上线下线请求处理的回调函数
void onServiceRequest(const BaseConnection::ptr &conn, const ServiceRequest::ptr &msg) {
//1. 判断是上线还是下线请求,如果都不是那就不用处理了
auto optype = msg->optype();
std::string method = msg->method();
std::unique_lock<std::mutex> lock(_mutex);
if (optype == ServiceOptype::SERVICE_ONLINE){
//2. 上线请求:找到MethodHost,向其中新增一个主机地址
auto it = _method_hosts.find(method);
if (it == _method_hosts.end()) {
auto method_host = std::make_shared<MethodHost>();
method_host->appendHost(msg->host());
_method_hosts[method] = method_host;
}else {
it->second->appendHost(msg->host());
}
} else if (optype == ServiceOptype::SERVICE_OFFLINE){
//3. 下线请求:找到MethodHost,从其中删除一个主机地址
auto it = _method_hosts.find(method);
if (it == _method_hosts.end()) {
return;
}
it->second->removeHost(msg->host());
_offline_callback(msg->host());
}
}
private:
OfflineCallback _offline_callback;
std::mutex _mutex;
std::unordered_map<std::string, MethodHost::ptr> _method_hosts;
Requestor::ptr _requestor;
};
}
}客户端整合
cpp
namespace myrpc {
namespace client {
class RegistryClient {
public:
using ptr = std::shared_ptr<RegistryClient>;
//构造函数传入注册中心的地址信息,用于连接注册中心
RegistryClient(const std::string &ip, int port):
_requestor(std::make_shared<Requestor>()),
_provider(std::make_shared<client::Provider>(_requestor)),
_dispatcher(std::make_shared<Dispatcher>()) {
auto rsp_cb = std::bind(&client::Requestor::onResponse, _requestor.get(),
std::placeholders::_1, std::placeholders::_2);
_dispatcher->registerHandler<BaseMessage>(MType::RSP_SERVICE, rsp_cb);
auto message_cb = std::bind(&Dispatcher::onMessage, _dispatcher.get(),
std::placeholders::_1, std::placeholders::_2);
_client = ClientFactory::create(ip, port);
_client->setMessageCallback(message_cb);
_client->connect();
}
//向外提供的服务注册接口
bool registryMethod(const std::string &method, const Address &host) {
return _provider->registryMethod(_client->connection(), method, host);
}
private:
Requestor::ptr _requestor;
client::Provider::ptr _provider;
Dispatcher::ptr _dispatcher;
BaseClient::ptr _client;
};
class DiscoveryClient {
public:
using ptr = std::shared_ptr<DiscoveryClient>;
//构造函数传入注册中心的地址信息,用于连接注册中心
DiscoveryClient(const std::string &ip, int port, const Discoverer::OfflineCallback &cb):
_requestor(std::make_shared<Requestor>()),
_discoverer(std::make_shared<client::Discoverer>(_requestor, cb)),
_dispatcher(std::make_shared<Dispatcher>()){
auto rsp_cb = std::bind(&client::Requestor::onResponse, _requestor.get(),
std::placeholders::_1, std::placeholders::_2);
_dispatcher->registerHandler<BaseMessage>(MType::RSP_SERVICE, rsp_cb);
auto req_cb = std::bind(&client::Discoverer::onServiceRequest, _discoverer.get(),
std::placeholders::_1, std::placeholders::_2);
_dispatcher->registerHandler<ServiceRequest>(MType::REQ_SERVICE, req_cb);
auto message_cb = std::bind(&Dispatcher::onMessage, _dispatcher.get(),
std::placeholders::_1, std::placeholders::_2);
_client = ClientFactory::create(ip, port);
_client->setMessageCallback(message_cb);
_client->connect();
}
//向外提供的服务发现接口
bool serviceDiscovery(const std::string &method, Address &host) {
return _discoverer->serviceDiscovery(_client->connection(), method, host);
}
private:
Requestor::ptr _requestor;
client::Discoverer::ptr _discoverer;
Dispatcher::ptr _dispatcher;
BaseClient::ptr _client;
};
class RpcClient {
public:
using ptr = std::shared_ptr<RpcClient>;
//enableDiscovery--是否启用服务发现功能,也决定了传入的地址信息是注册中心的地址,还是服务提供者的地址
RpcClient(bool enableDiscovery, const std::string &ip, int port):
_enableDiscovery(enableDiscovery),
_requestor(std::make_shared<Requestor>()),
_dispatcher(std::make_shared<Dispatcher>()),
_caller(std::make_shared<myrpc::client::RpcCaller>(_requestor)) {
//针对rpc请求后的响应进行的回调处理
auto rsp_cb = std::bind(&client::Requestor::onResponse, _requestor.get(),
std::placeholders::_1, std::placeholders::_2);
_dispatcher->registerHandler<BaseMessage>(MType::RSP_RPC, rsp_cb);
//如果启用了服务发现,地址信息是注册中心的地址,是服务发现客户端需要连接的地址,则通过地址信息实例化discovery_client
//如果没有启用服务发现,则地址信息是服务提供者的地址,则直接实例化好rpc_client
if (_enableDiscovery) {
auto offline_cb = std::bind(&RpcClient::delClient, this, std::placeholders::_1);
_discovery_client = std::make_shared<DiscoveryClient>(ip, port, offline_cb);
}else {
auto message_cb = std::bind(&Dispatcher::onMessage, _dispatcher.get(),
std::placeholders::_1, std::placeholders::_2);
_rpc_client = ClientFactory::create(ip, port);
_rpc_client->setMessageCallback(message_cb);
_rpc_client->connect();
}
}
bool call(const std::string &method, const Json::Value ¶ms, Json::Value &result) {
//获取服务提供者:1. 服务发现; 2. 固定服务提供者
BaseClient::ptr client = getClient(method);
if (client.get() == nullptr) {
return false;
}
//3. 通过客户端连接,发送rpc请求
return _caller->call(client->connection(), method, params, result);
}
bool call(const std::string &method, const Json::Value ¶ms, RpcCaller::JsonAsyncResponse &result) {
BaseClient::ptr client = getClient(method);
if (client.get() == nullptr) {
return false;
}
//3. 通过客户端连接,发送rpc请求
return _caller->call(client->connection(), method, params, result);
}
bool call(const std::string &method, const Json::Value ¶ms, const RpcCaller::JsonResponseCallback &cb) {
BaseClient::ptr client = getClient(method);
if (client.get() == nullptr) {
return false;
}
//3. 通过客户端连接,发送rpc请求
return _caller->call(client->connection(), method, params, cb);
}
private:
BaseClient::ptr newClient(const Address &host) {
auto message_cb = std::bind(&Dispatcher::onMessage, _dispatcher.get(),
std::placeholders::_1, std::placeholders::_2);
auto client = ClientFactory::create(host.first, host.second);
client->setMessageCallback(message_cb);
client->connect();
putClient(host, client);
return client;
}
BaseClient::ptr getClient(const Address &host) {
std::unique_lock<std::mutex> lock(_mutex);
auto it = _rpc_clients.find(host);
if (it == _rpc_clients.end()) {
return BaseClient::ptr();
}
return it->second;
}
BaseClient::ptr getClient(const std::string method) {
BaseClient::ptr client;
if (_enableDiscovery) {
//1. 通过服务发现,获取服务提供者地址信息
Address host;
bool ret = _discovery_client->serviceDiscovery(method, host);
if (ret == false) {
ELOG("当前 %s 服务,没有找到服务提供者!", method.c_str());
return BaseClient::ptr();
}
//2. 查看服务提供者是否已有实例化客户端,有则直接使用,没有则创建
client = getClient(host);
if (client.get() == nullptr) {//没有找打已实例化的客户端,则创建
client = newClient(host);
}
}else {
client = _rpc_client;
}
return client;
}
void putClient(const Address &host, BaseClient::ptr &client) {
std::unique_lock<std::mutex> lock(_mutex);
_rpc_clients.insert(std::make_pair(host, client));
}
void delClient(const Address &host) {
std::unique_lock<std::mutex> lock(_mutex);
_rpc_clients.erase(host);
}
private:
struct AddressHash {
size_t operator()(const Address &host) const{
std::string addr = host.first + std::to_string(host.second);
return std::hash<std::string>{}(addr);
}
};
bool _enableDiscovery;
DiscoveryClient::ptr _discovery_client;
Requestor::ptr _requestor;
RpcCaller::ptr _caller;
Dispatcher::ptr _dispatcher;
BaseClient::ptr _rpc_client;//用于未启用服务发现
std::mutex _mutex;
//<"127.0.0.1:8080", client1>
std::unordered_map<Address, BaseClient::ptr, AddressHash> _rpc_clients;//用于服务发现的客户端连接池
};
class TopicClient {
public:
TopicClient(const std::string &ip, int port):
_requestor(std::make_shared<Requestor>()),
_dispatcher(std::make_shared<Dispatcher>()),
_topic_manager(std::make_shared<TopicManager>(_requestor)) {
auto rsp_cb = std::bind(&Requestor::onResponse, _requestor.get(),
std::placeholders::_1, std::placeholders::_2);
_dispatcher->registerHandler<BaseMessage>(MType::RSP_TOPIC, rsp_cb);
auto msg_cb = std::bind(&TopicManager::onPublish, _topic_manager.get(),
std::placeholders::_1, std::placeholders::_2);
_dispatcher->registerHandler<TopicRequest>(MType::REQ_TOPIC, msg_cb);
auto message_cb = std::bind(&Dispatcher::onMessage, _dispatcher.get(),
std::placeholders::_1, std::placeholders::_2);
_rpc_client = ClientFactory::create(ip, port);
_rpc_client->setMessageCallback(message_cb);
_rpc_client->connect();
}
bool create(const std::string &key) {
return _topic_manager->create(_rpc_client->connection(), key);
}
bool remove(const std::string &key) {
return _topic_manager->remove(_rpc_client->connection(), key);
}
bool subscribe(const std::string &key, const TopicManager::SubCallback &cb) {
return _topic_manager->subscribe(_rpc_client->connection(), key, cb);
}
bool cancel(const std::string &key) {
return _topic_manager->cancel(_rpc_client->connection(), key);
}
bool publish(const std::string &key, const std::string &msg) {
return _topic_manager->publish(_rpc_client->connection(), key, msg);
}
void shutdown() {
_rpc_client->shutdown();
}
private:
Requestor::ptr _requestor;
TopicManager::ptr _topic_manager;
Dispatcher::ptr _dispatcher;
BaseClient::ptr _rpc_client;//用于未启用服务发现
};
}
}八、项目总结
项目功能:实现了基础的rpc远程调用功能,以及基于服务注册与发现的rpc远程调用功能,简单的发布订阅功能
所用技术:json序列化反序列化,网络通信Muduo,rpc,发布订阅
框架设计:
抽象层:针对底层的网络通信和协议部分进行了抽象,降低框架的依赖,提高框架的灵活度,以及可维护性
具象层:针对抽象的功能进行具体的实现(Muduo库搭建高性能客户端服务器,TLV应用层协议格式,消息类型)
业务层:基础rpc,服务发现与注册以及上线下线通知,发布订阅
具体模块划分:
应用层协议的抽象与实现
网络通信模块的抽象与实现
消息的抽象与实现
rpc客户端与服务端业务
服务发现与注册业务
发布订阅业务