目录
[1. 什么是角点检测](#1. 什么是角点检测)
[2. 检测流程](#2. 检测流程)
[3. 邻域的作用](#3. 邻域的作用)
[4. 案例实现](#4. 案例实现)
[二、SIFT 特征提取](#二、SIFT 特征提取)
[1. 什么是 SIFT 特征提取](#1. 什么是 SIFT 特征提取)
[2. 步骤](#2. 步骤)
[3. 案例实现](#3. 案例实现)
在计算机视觉领域,角点检测和特征提取是关键技术,为图像匹配、目标识别等任务提供基础。本文将深入讲解角点检测与 SIFT(尺度不变特征变换)特征提取的原理,并结合案例演示其在 OpenCV 中的实现。
一、角点检测
1. 什么是角点检测
角点是图像中局部区域与周围有显著灰度变化的点或像素,比如物体的拐角、边缘的交点等。角点检测旨在从图像中找出这些具有特殊视觉意义的点,它在图像配准、目标跟踪等场景中应用广泛,且角点具有旋转不变性、尺度不变性等优良特性。
2. 检测流程
(1)输入图像
将待进行角点检测的图像作为输入,图像可以是彩色或灰度图像,但后续处理通常会转为灰度图。
(2)图像预处理
对输入图像进行灰度化、降噪等操作。灰度化减少了图像的通道数,降低计算复杂度;降噪则能避免图像中的噪声对后续角点检测结果产生干扰。
(3)特征提取
运用特定的角点检测算法(如 Harris 角点检测算法、Shi - Tomasi 角点检测算法等),从预处理后的图像中提取角点相关特征。
(4)角点检测
依据所选的角点检测算法,计算图像中每个像素点的角点响应值,以此判断该像素点是否为角点。不同算法计算角点响应值的方式存在差异。
(5)角点定位和标记
根据角点响应值确定角点的位置,并在图像上进行标记,以便直观地展示角点所在位置。
(6)角点筛选或后处理(可选)
可根据实际需求,对检测到的角点进行筛选或后处理,例如通过非极大值抑制去除重复或不准确的角点,或者通过阈值过滤掉响应值较低的疑似角点。
(7)输出结果
将检测到的角点位置信息、标记后的图像等相关结果进行输出。
3. 邻域的作用
在角点检测中,邻域指中心像素周围的一组像素点。检测角点时,需要利用邻域内像素的特征,如灰度变化、梯度等。邻域大小至关重要,它决定了参与计算的像素点数量。较大的邻域能捕获更多细节信息,但会增加计算复杂度;较小的邻域计算速度快,但可能导致角点检测结果不准确,需根据具体算法和应用场景选择合适的邻域大小。
4. 案例实现
下面通过 Harris 角点检测算法来演示角点检测的过程:
python
import cv2
# 读取图像
img = cv2.imread('huanghelou.png')
cv2.imshow('Original Image', img)
cv2.waitKey(0)
# 转为灰度图
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 进行 Harris 角点检测
# 参数分别为:灰度图、邻域大小、Sobel 算子窗口大小、Harris 角点检测方程的自由参数
dst = cv2.cornerHarris(gray, 4, 3, 0.04)
# 标记检测到的角点(将角点标记为绿色)
img[dst > 0.05 * dst.max()] = [0, 255, 0]
cv2.imshow('Harris Corners', img)
cv2.waitKey(0)
cv2.destroyAllWindows()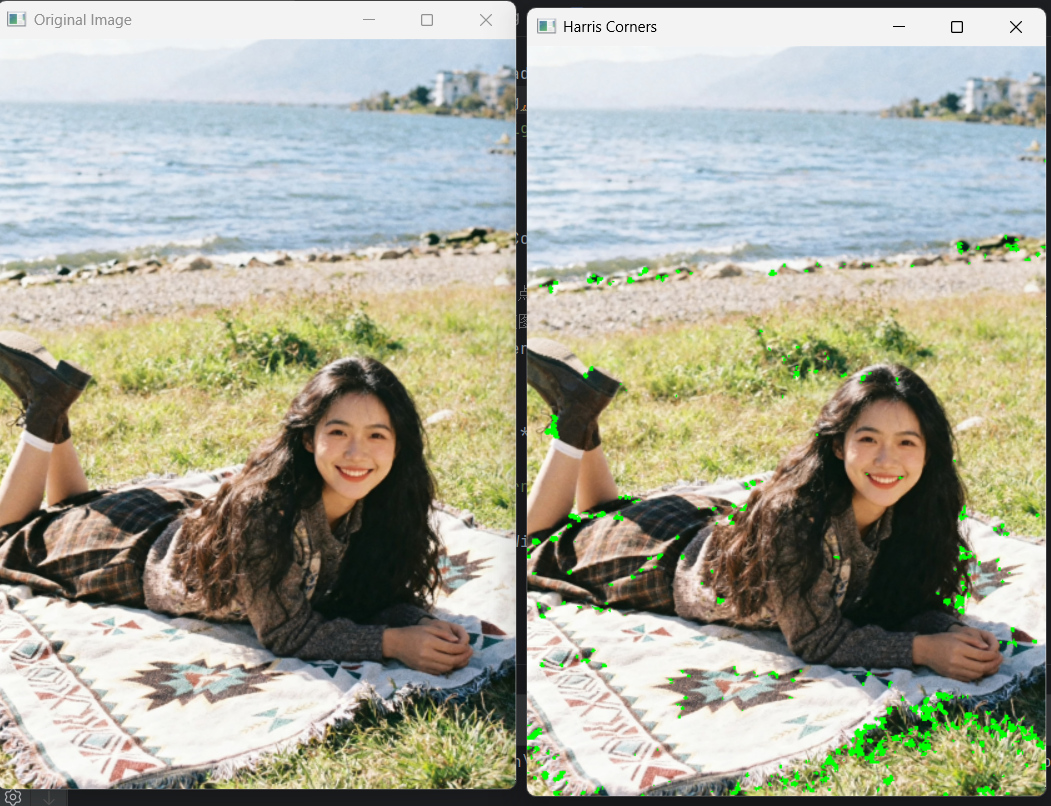
这些绿色点即为检测到的角点。
二、SIFT 特征提取
1. 什么是 SIFT 特征提取
SIFT(尺度不变特征变换)是一种用于图像特征提取的算法,能够在图像中检测并描述局部特征点。它具有尺度不变性、旋转不变性等特性,即使图像发生缩放、旋转等变换,仍能稳定地提取特征,在图像匹配、物体识别等领域应用广泛。
2. 步骤
(1)数据预处理
对原始图像进行去噪、归一化、平滑等操作,减少图像中的噪声和冗余信息,为后续特征提取做好准备。
(2)特征选择
从原始图像中选择合适的特征子集,避免包含过多冗余或无关的特征,提高特征的代表性和区分度。
(3)特征提取
基于 SIFT 算法的原理,在图像中检测尺度空间极值点,确定特征点的位置、尺度和方向等信息,进而提取出特征点的描述符。
(4)特征表示
将提取到的特征以数值、向量等形式进行表示,使其便于计算机进行处理和分析,例如用于后续的特征匹配等任务。
3. 案例实现
以下是使用 SIFT 进行特征提取的代码示例:
python
import cv2
import numpy as np
# 读取图像
man = cv2.imread('man.png')
cv2.imshow('Original Image', man)
cv2.waitKey(0)
# 转为灰度图
man_gray = cv2.cvtColor(man, cv2.COLOR_BGR2GRAY)
# 创建 SIFT 对象并检测关键点
sift = cv2.SIFT_create()
kp = sift.detect(man_gray)
# 绘制关键点
man_sift = cv2.drawKeypoints(man, kp, None, flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
cv2.imshow('SIFT Keypoints', man_sift)
cv2.waitKey(0)
# 计算关键点描述符
keypoints, des = sift.compute(man_gray, kp)
# 打印关键点数量和描述符形状
print(f"Number of keypoints: {len(keypoints)}")
print(f"Descriptor shape: {des.shape}")
cv2.destroyAllWindows()
这些关键点以带有方向和尺度信息的圆圈等形式呈现。同时,在控制台会输出关键点的数量以及描述符的形状信息。
总结
角点检测能快速定位图像中的关键角点,为图像分析提供基础;SIFT 特征提取则能提取具有尺度、旋转不变性的特征,适用于复杂场景下的图像匹配等任务。通过 OpenCV 提供的相关接口,我们可以便捷地实现这些功能,为计算机视觉应用开发助力。