对于 PLC 初学者来说,"流水灯" 是绕不开的经典入门案例 ------ 它看似简单,却浓缩了 PLC 编程的核心逻辑:初始化、时序控制、指令应用与状态判断。今天我们就以 S7-200 SMART 为例,逐行拆解一段 8 位流水灯控制程序,带你从 "看懂代码" 到 "理解思想",为后续复杂控制打下基础。
一、程序核心功能:先明确 "它能做什么"
在拆解代码前,先搞清楚程序的最终效果,这样后续分析会更有目标感:
- 控制对象:8 个输出点(Q0.0~Q0.7,对应 8 个 LED 灯)
- 触发条件:按下启动按钮(I0.0)
- 运行逻辑:按下按钮后 Q0.0 先亮,之后每 1 秒灯光向左移动 1 位(Q0.0→Q0.1→...→Q0.7)
- 停止条件:完成 8 次移位后,所有灯自动熄灭,等待下一次启动
二、逐网络拆解:从 "代码" 到 "逻辑"
S7-200 SMART 的程序以 "网络" 为单位,每个网络实现一个独立功能。我们按逻辑顺序逐一分析,重点解读关键指令的作用。
网络 1:上电初始化 ------ 给系统 "设定初始状态"
|----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| LD SM0.1 // 加载"首次扫描周期"特殊位 MOVB 2#00000001, VB100 // 给VB100赋初始值(二进制00000001) MOVB 0, VB101 // 给VB101赋0(移位计数器清零) MOVB 0, VB200 // 给VB200赋0(运行标志位设为"停止") 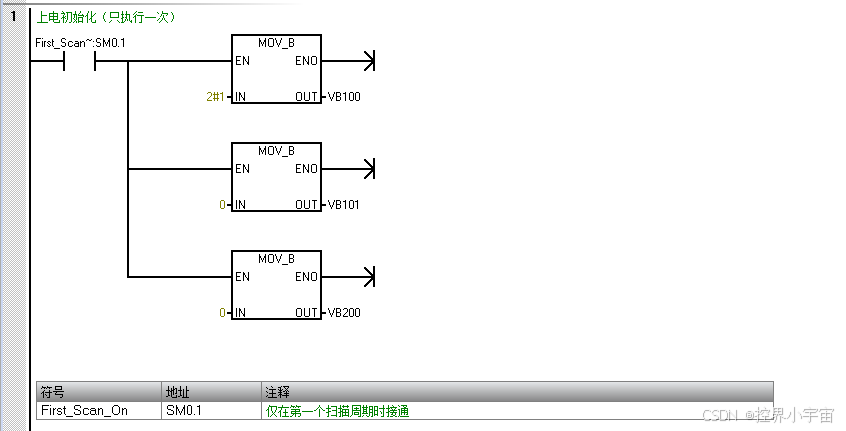 |
|
关键指令解读:
- SM0.1(首次扫描位) :PLC 从 "停止" 切换到 "运行" 的第一个扫描周期,SM0.1 会短暂置 1,之后永久为 0。这意味着 ------网络 1 的代码只在 "上电瞬间" 执行一次,不会重复运行。
- MOVB(字节移动指令) :把一个字节的数值,复制到另一个字节寄存器中。这里三个 MOVB 的作用是:
- VB100:控制灯光的 "核心寄存器",二进制00000001表示 "只有最低位(V100.0)为 1",对应 Q0.0 亮(后续会关联到输出);
- VB101:移位计数器,初始化为 0,用来记录 "已经移了多少次";
- VB200:运行标志位,0 = 停止、1 = 运行,初始设为停止,避免上电后自动运行。
网络 1 的核心作用:上电瞬间给系统 "复位",确保每次启动都从 "Q0.0 亮" 开始。
网络 2:启动触发 ------ 按下按钮,系统 "开始运行"
|-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| LD I0.0 // 加载启动按钮(I0.0)状态 EU // 上升沿检测指令 MOVB 2#00000001, VB100 // 重置VB100为初始值(Q0.0亮) MOVB 0, VB101 // 移位计数器清零 MOVB 1, VB200 // 运行标志位置1(系统进入"运行"状态)  |
|
关键指令解读:
- EU(上升沿检测):这是避免 "按钮长按重复触发" 的核心!它只在 "前一个逻辑从 0 变 1 的瞬间"(即按钮按下的那一刻)产生 1 个扫描周期的脉冲,哪怕按钮一直按着,后续也不会再触发。
- 举个例子:如果没有 EU,按钮长按 10 秒,后面的 MOVB 会重复执行 10 秒,导致程序混乱;有了 EU,无论按钮按多久,代码只执行一次。
- 启动后的状态变化 :按下按钮后,程序会做三件事:
- 重置 VB100:确保每次启动都从 Q0.0 开始亮(哪怕上次停在 Q0.5,这次也重新来);
- 清零 VB101:重新开始计数移位次数;
- 置 1 VB200:告诉系统 "可以开始运行了",为后续的移位做准备。
网络 2 的核心作用:响应 "启动按钮",让系统从 "停止" 切换到 "运行初始状态"。
网络 3:产生移位脉冲 ------ 控制 "灯光移动的节奏"
|-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| LD VB200 // 加载运行标志位(只有VB200=1时,后续逻辑才有效) AN SM0.5 // "与非"SM0.5(取反SM0.5的状态) = M0.0 // 结果输出到辅助继电器M0.0 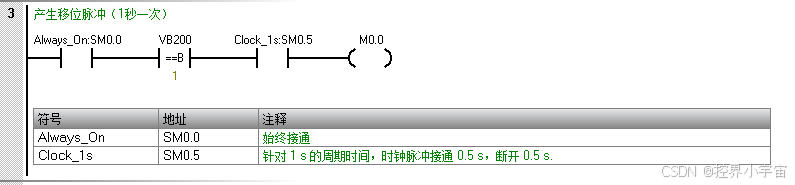 |
|
关键指令解读:
- SM0.5(1 秒时钟脉冲):S7-200 SMART 的内置脉冲位,固定输出 "1 秒通、1 秒断" 的循环信号(占空比 50%),相当于一个 "精准的 1 秒计时器"。
- AN(与非)逻辑:先判断 "VB200 是否为 1"(系统在运行),再判断 "SM0.5 是否为 0",两者都满足时,M0.0 才会置 1。
为什么能产生 "1 秒一次的移位脉冲"?
我们用表格看 M0.0 的状态变化(假设 VB200=1,系统在运行):
|--------|----------|-------------|---------|
| 时间阶段 | SM0.5 状态 | AN SM0.5 结果 | M0.0 状态 |
| 0~1 秒 | 0 | 1 | 1 |
| 1~2 秒 | 1 | 0 | 0 |
| 2~3 秒 | 0 | 1 | 1 |
| 3~4 秒 | 1 | 0 | 0 |
可见:M0.0 会每 1 秒产生一个 "从 1 变 0" 的下降沿脉冲,这个脉冲就是后续 "灯光移位" 的触发信号 ------ 每 1 秒触发一次移位。
网络 3 的核心作用:在系统运行时,生成 "1 秒一次" 的移位触发脉冲。
网络 4:执行移位 + 控制输出 ------ 让 "灯光动起来"
|-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| LD M0.0 // 加载移位脉冲(M0.0有脉冲时执行后续操作) SHL_B VB100, 1, VB100 // 字节左移:VB100左移1位,结果存回VB100 MOVB VB100, QB0 // 把VB100的值传给输出字节QB0(控制灯光亮灭) 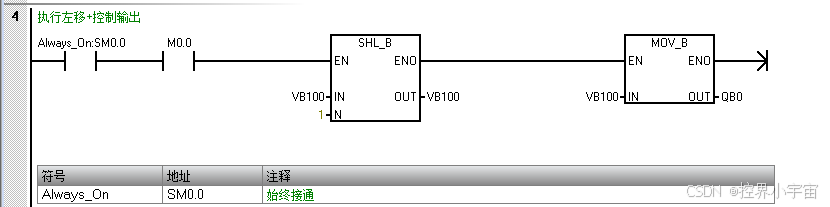 |
|
关键指令解读:
- SHL_B(字节左移指令) :把一个字节的 8 位二进制数 "整体向左移动 N 位",移出的高位丢失,低位补 0。这里 "SHL_B VB100,1,VB100" 表示:
- 原始 VB100:00000001(Q0.0 亮)→ 左移 1 位后:00000010(Q0.1 亮);
- 再左移 1 位:00000100(Q0.2 亮);
- 以此类推,直到左移 7 次后:10000000(Q0.7 亮)。
- QB0(输出字节) :S7-200 SMART 的输出点按 "字节" 分组,QB0 对应 Q0.0~Q0.7。MOVB VB100, QB0相当于 "把 VB100 的每一位状态,直接复制到 QB0 的对应位"------VB100 哪一位是 1,QB0 对应的灯就亮。
|-------|-----------|----------|
| 移位次数 | VB100 二进制 | 对应亮灯的输出点 |
| 0(初始) | 00000001 | Q0.0 |
| 1 | 00000010 | Q0.1 |
| 2 | 00000100 | Q0.2 |
| ... | ... | ... |
| 7 | 10000000 | Q0.7 |
网络 4 的核心作用:用移位指令让 "亮灯位置左移",再通过输出指令控制实际灯光。
网络 5:计数停止 ------ 移位 8 次后,让系统 "自动收尾"
|-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| LD M0.0 // 加载移位脉冲(每次移位都计数) INCB VB101 // 字节加1:VB101的值+1(记录移位次数) LDB= VB101, 8 // 比较VB101是否等于8(判断是否完成8次移位) MOVB 0, VB200 // 若等于8,运行标志位置0(停止移位) MOVB 0, QB0 // 若等于8,QB0置0(所有灯熄灭) 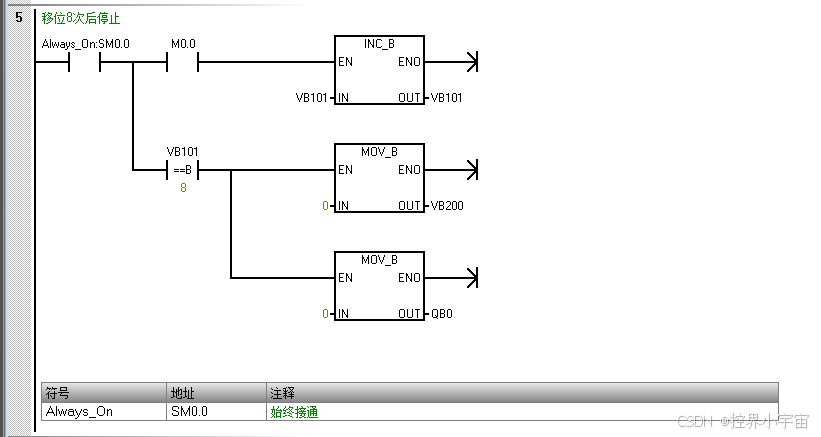 |
|
关键指令解读:
- INCB(字节加 1 指令):每次 M0.0 有脉冲(即每移位一次),VB101 就加 1------ 相当于 "给移位次数记账"。
- LDB=(字节等于比较指令):持续判断 "VB101 是否等于 8",只有满足时,后面的两条 MOVB 才会执行。
为什么是 "8 次"?
因为我们控制 8 个灯(Q0.0~Q0.7),从 Q0.0 移到 Q0.7 需要 7 次移位,但程序中 "移位 1 次计数 1 次",当计数到 8 时,意味着 "所有灯都轮过一次",此时需要停止:
- 置 0 VB200:系统从 "运行" 切回 "停止",网络 3 不再产生移位脉冲;
- 置 0 QB0:强制所有输出点断电,灯光全灭。
网络 5 的核心作用:通过计数判断 "流水灯是否完成一轮",完成后自动停止并灭灯。
三、核心知识点总结:从案例到通用逻辑
这段程序虽然简单,但覆盖了 PLC 编程的 5 个核心思想,学会后能迁移到大部分控制场景:
- 初始化逻辑:用 SM0.1 在启动时设置初始状态,避免混乱;
- 边沿触发:用 EU 检测按钮 "按下瞬间",避免长按重复触发;
- 时序控制:用 SM0.5 等时钟脉冲控制 "动作节奏"(如 1 秒一次);
- 数据操作:用移位(SHL_B)、加减(INCB)指令处理控制数据;
- 状态判断:用比较指令(LDB=)判断 "是否达到目标状态",实现自动停止。
四、实际应用拓展:让程序更灵活
学会基础程序后,我们可以简单修改,实现更多功能:
- 右移流水灯:把 SHL_B(左移)换成 SHR_B(右移),灯光从 Q0.7 向 Q0.0 移动;
- 调整速度:把 SM0.5(1 秒)换成 SM0.4(2 秒),移位间隔变成 2 秒;
- 增加暂停按钮:在网络 3 中增加 "LD NOT I0.1"(I0.1 为暂停按钮),按下 I0.1 时暂停移位;
- 循环流水灯:删除网络 5 的 "MOVB 0, VB200",让灯光移到 Q0.7 后继续从 Q0.0 开始(需处理移位溢出,可结合 SM1.1)。
五、结语
流水灯是 PLC 入门的 "敲门砖",它的价值不在于 "控制灯光",而在于帮我们理解 "PLC 如何按逻辑一步步工作"。建议大家在 S7-200 SMART 的编程软件(STEP 7-Micro/WIN SMART)中实际搭建这段程序,模拟运行时观察每个寄存器(VB100、VB101、M0.0)的状态变化 ------ 亲手操作后,很多抽象的指令逻辑会瞬间清晰。