卫星雷达(又称为分布式雷达)主要讲当前雷达的雷达信号处理计算以及雷达目标相关的一些感知算法都迁移到中央域控进行,雷达端基本只负责数据采集,这样做的影响如下:
-
雷达端成本与功耗降低;
-
雷达端采样得到的原始数据进入中央域控处理,可以进行RawData级融合算法或者点云级融合算法,得到更多的原始信息;
-
域控端接口成本上升,域控端需要将CAN或者百兆以太网更新为千兆以太网或者Serdes;
-
域控端算力成本上升,域控端需要增加DSP内核,以便对雷达RadarData进行雷达信号处理;
-
对千兆以太网或者Serdes的需求增大;
 图1 Schematic diagram of traditional edge computing radar and domain controller system
图1 Schematic diagram of traditional edge computing radar and domain controller system
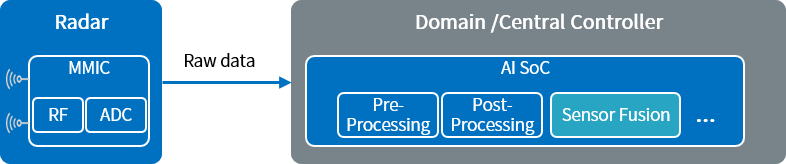 图2 Centralized computing radar and domain controller system
图2 Centralized computing radar and domain controller system
1、卫星雷达和4D雷达的关系
下表是从4D雷达解决方案套片中摘录出来,可以看到,分布式卫星雷达,只需要将4D雷达的MMIC拿来用就可以了,但是还有一些差别,三大家也推出了专门的分布式卫星雷达MMIC,这些MMIC中有简单的DSP,能对RawData进行1DFFT,然后再通过千兆以太网输出,
NXP
| MMIC or Radar SoC | 说明 |
|---|---|
| TEF82xx(3T4R) | 3T4R的单芯片MMIC,可级联,需要用Serdes传输RawData |
| TEF????(8T8R) | 某8T8R的单芯片MMIC,可级联,需要用Serdes传输RawData |
| SAF86xx(4T4R)输出1DFFT后数据 | 1Gbps 以太网接口 |
TI
| MMIC or Radar SoC | 说明 |
|---|---|
| AWR2243(3T4R) | 3T4R的单芯片MMIC,可级联,需要用Serdes传输RawData |
| AWR2188(8T8R) | 8T8R的单芯片MMIC,可级联,需要用Serdes传输RawData |
| AWR2544(4T4R)输出1DFFT后数据 | 1Gbps 以太网接口 |
Infineon
| MMIC or Radar SoC | 说明 |
|---|---|
| CTRX8161(3T4R) | 3T4R的单芯片MMIC,可级联,需要用Serdes传输RawData |
| CTRX8181(4T4R) | 4T4R的单芯片MMIC,不能级联,需要用Serdes传输RawData |
| CTRX8191F(4T4R) | 4T4R的单芯片MMIC,可级联,需要用Serdes传输RawData |
2、卫星雷达方案
NXP
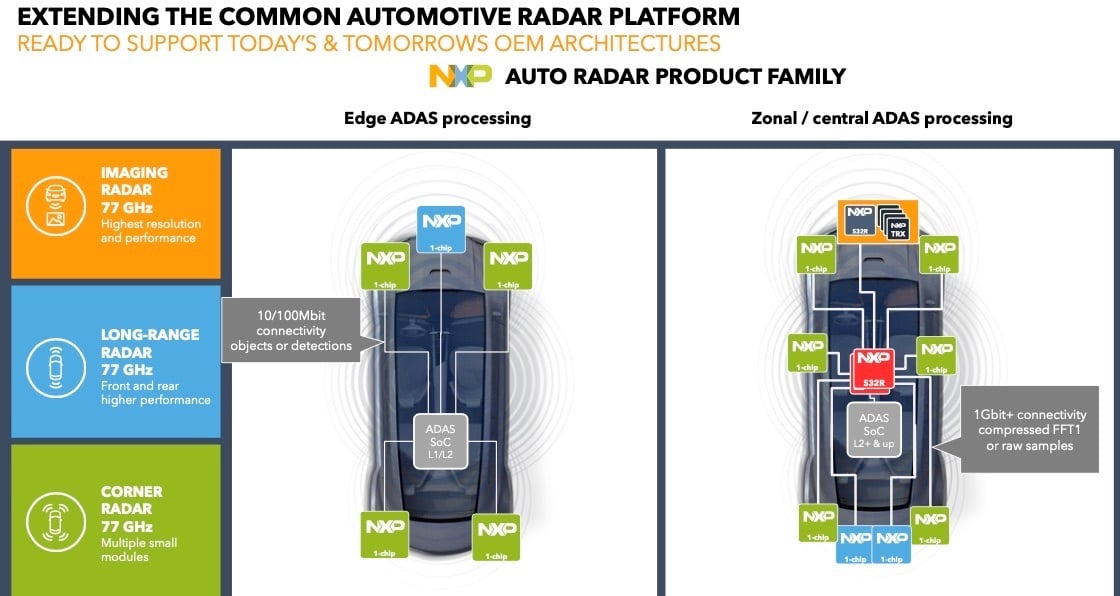 图3 NXP的分布式雷达与传统雷达整车系统方案对比
图3 NXP的分布式雷达与传统雷达整车系统方案对比
Ref:Evaluating Distributed Radar Architectures? Here Are 4 Reasons You Should
TI
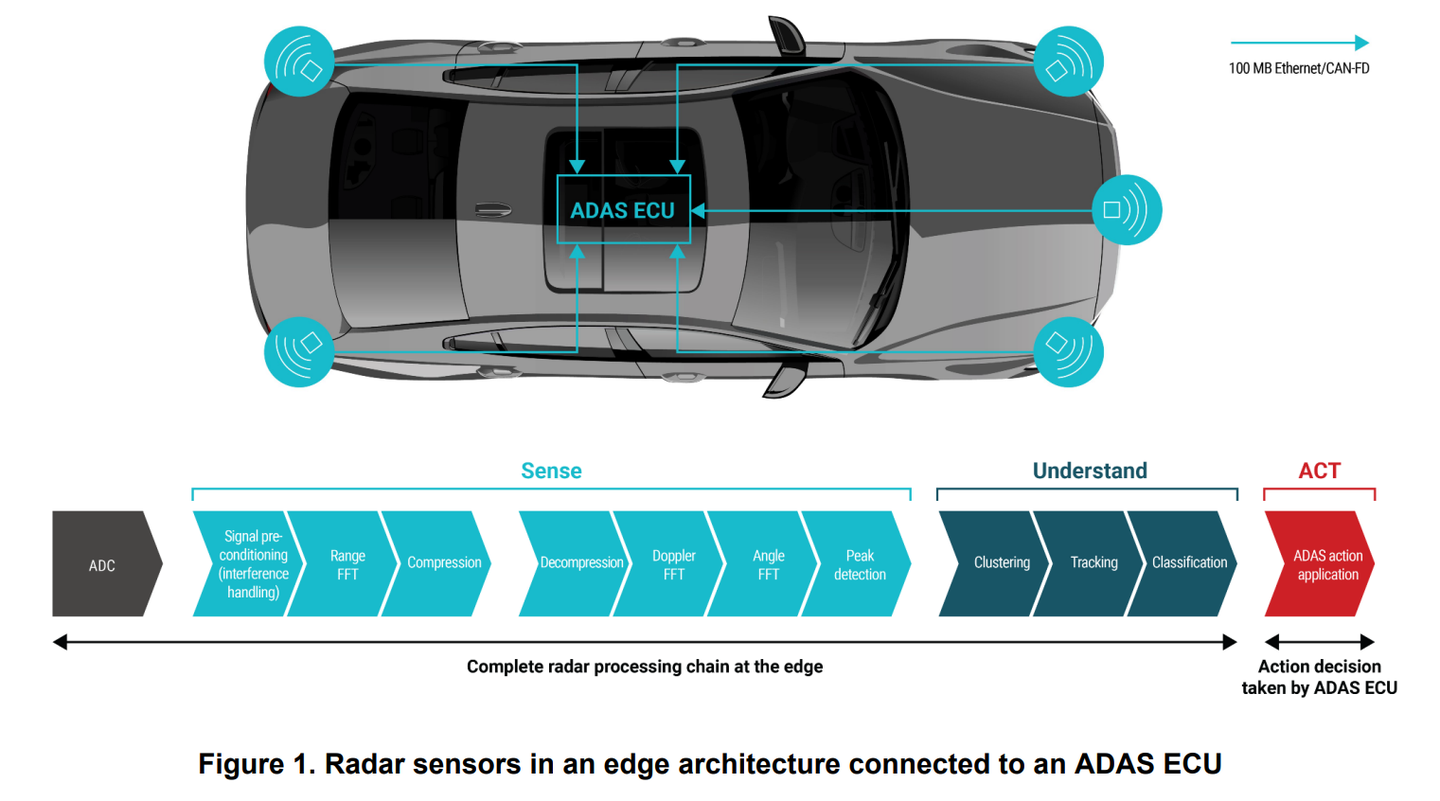 图4 TI的分布式雷达与传统雷达整车系统方案对比
图4 TI的分布式雷达与传统雷达整车系统方案对比
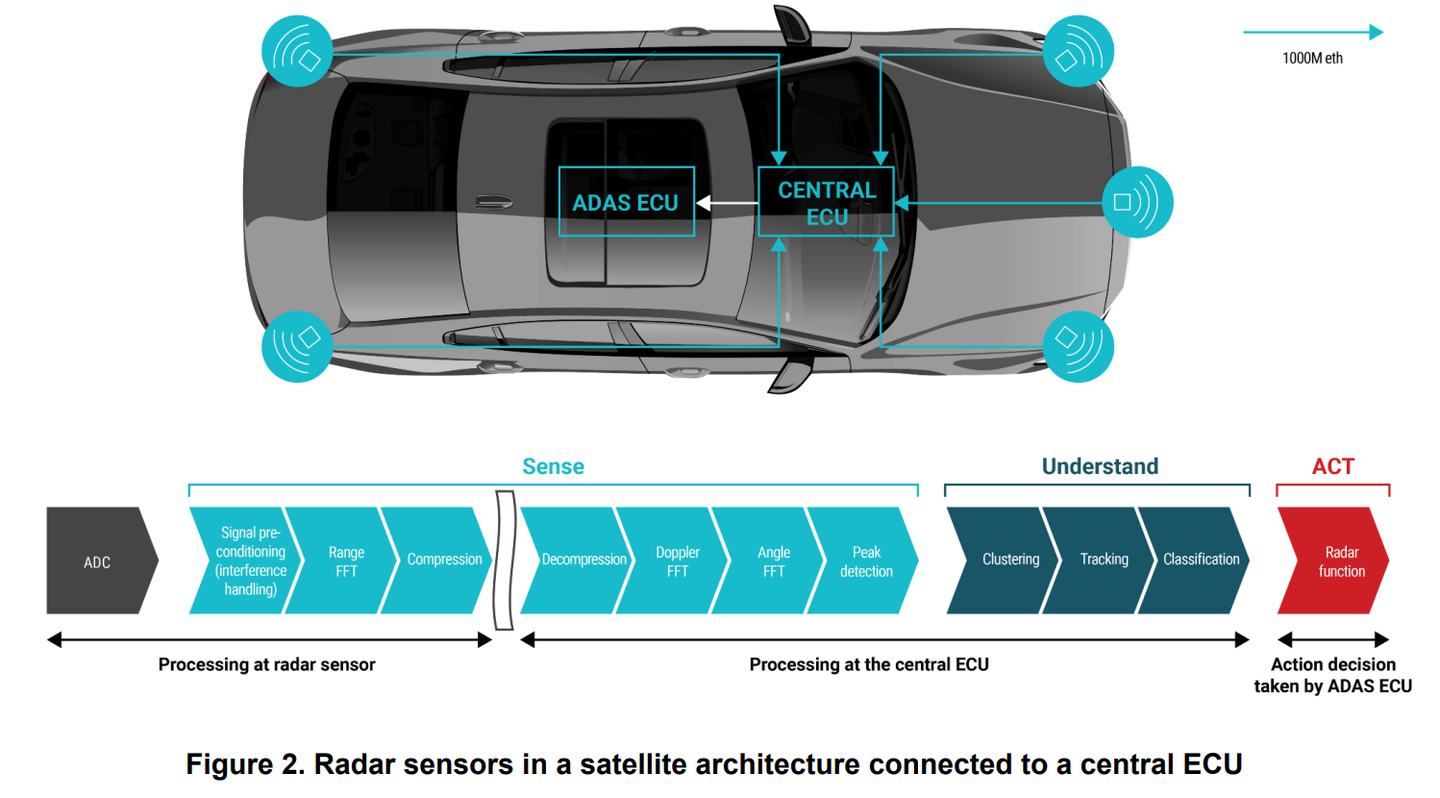 图5 TI的分布式雷达与传统雷达整车系统方案对比
图5 TI的分布式雷达与传统雷达整车系统方案对比
瑞萨
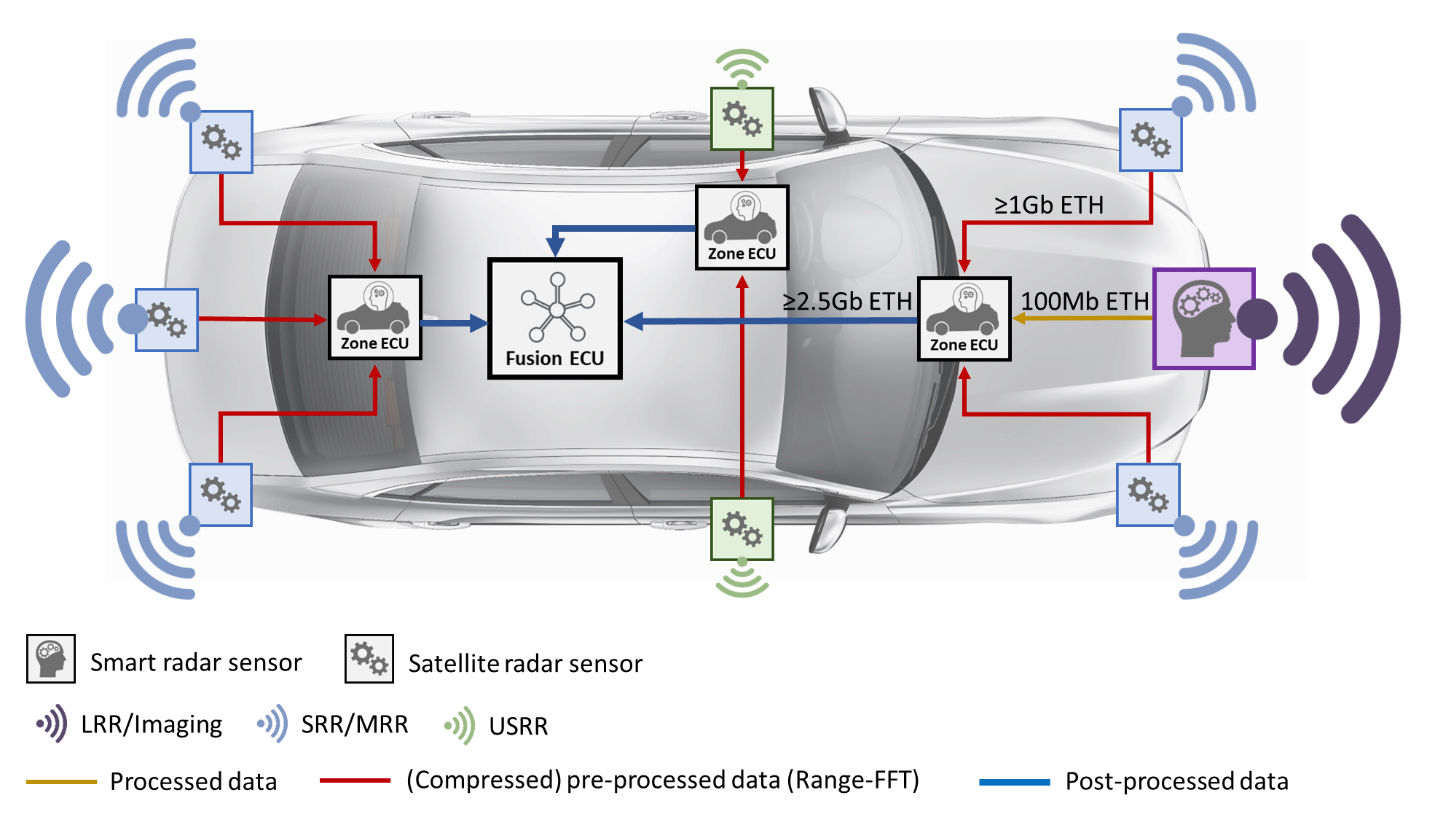 图6 瑞萨的分布式雷达与传统雷达整车系统方案对比
图6 瑞萨的分布式雷达与传统雷达整车系统方案对比
Infineon
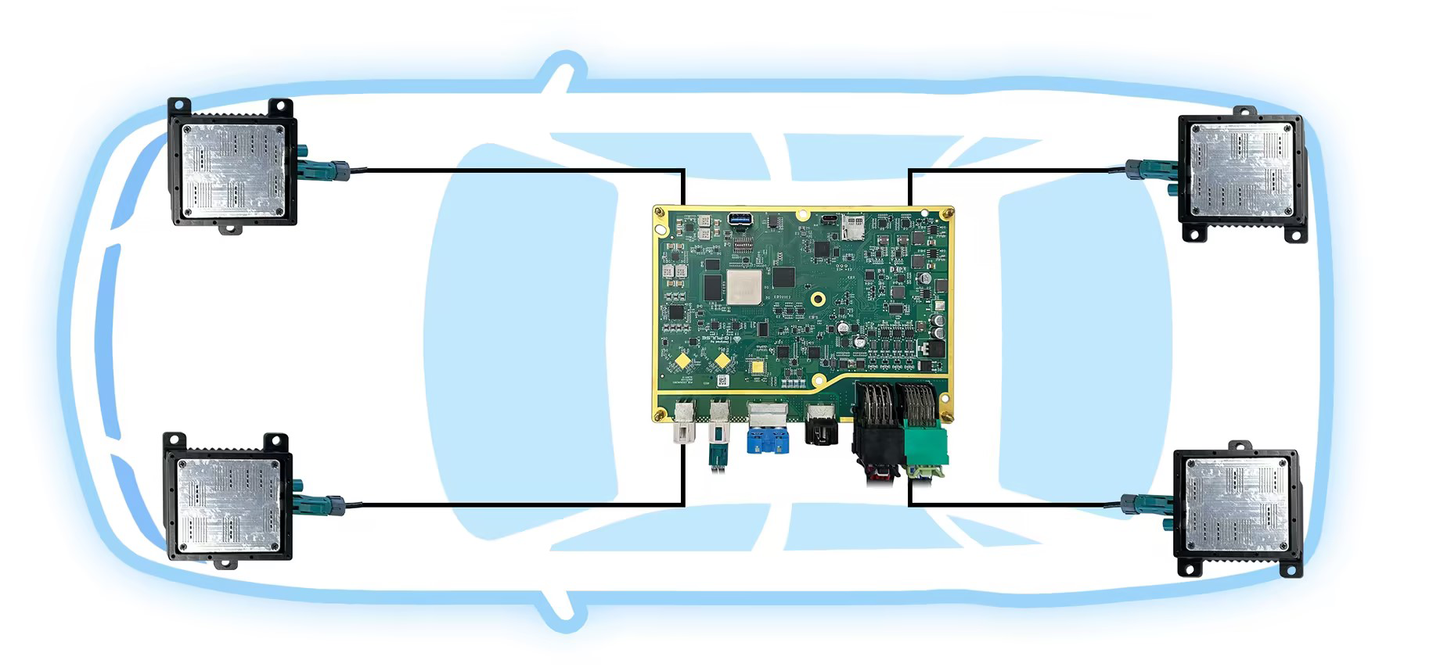 图7 Infineon的布式雷达系统方案
图7 Infineon的布式雷达系统方案
小结
总整体上看,目前MMIC芯片供应商定义的分布式卫星雷达,都是进行了1DFFT并压缩后通过千兆以太网传输到区域控制器进行几个雷达的后端算法出来,然后在提交给中央域控(或者说ADAS域);
该方式在整车上不会这样进行,整车会直接在中央域控中进行,至于是采样Serdes传输RawData还是用以太网传输1DFFT压缩数据,这个需要看中央域控配置Serdes还是以太网的成本以及,ADAS SoC的内部算力(是否含有富裕的DSP等)。
3、为什么需要分布式卫星雷达
集中处理能够实现有效的传感器融合算法,从而实现更精准的决策。这与人脑基于双眼输入而非单眼独立决策的原理类似。原始设备制造商 (OEM) 可以部署用于提高角度分辨率(分布式孔径雷达)和最大速度的算法,甚至用于物体分类的机器学习算法。传感器输入与这些算法的融合,可以提升感知性能,并生成相对精确的感知地图。对于汽车制造商而言,这意味着更高的自动驾驶水平。对于驾驶员和乘客而言,则意味着更安全的汽车。
此外,使用卫星雷达传感器可以实现系统的可扩展性和模块化。将传感器放置在车辆周围更便捷的位置,可以实现许多 ADAS 应用。只需更改传感器的数量或配置,即可调整覆盖范围,从而将单一平台从成本敏感的低端车型扩展到提供不同自动驾驶级别的差异化高端车型。
卫星架构通过传感器融合算法和中央ECU更强大的计算能力提升了价值。简化的卫星传感器和通过软件实现的差异化有助于降低系统复杂性,并提供创造价值的新途径。此外,使用卫星雷达使汽车制造商能够选择使用无线软件更新来提升系统性能并增强安全性。这些多重优势------性能、可扩展性和简洁性------都使卫星架构在汽车行业中占据了显著地位。
例如,该方案将射频芯片的原始数据直接送入SoC,省去了预处理环节,利用SoC进行统一的时域数据处理。SoC内部的DSP等专用硬件加速单元,可以实现FFT、CFAR、DOA、超分辨率等处理算法,并输出点云数据。进一步处理后,还可以生成目标类型、运动轨迹等信息,从而更好地应对各种智能驾驶场景,提升主动安全性。
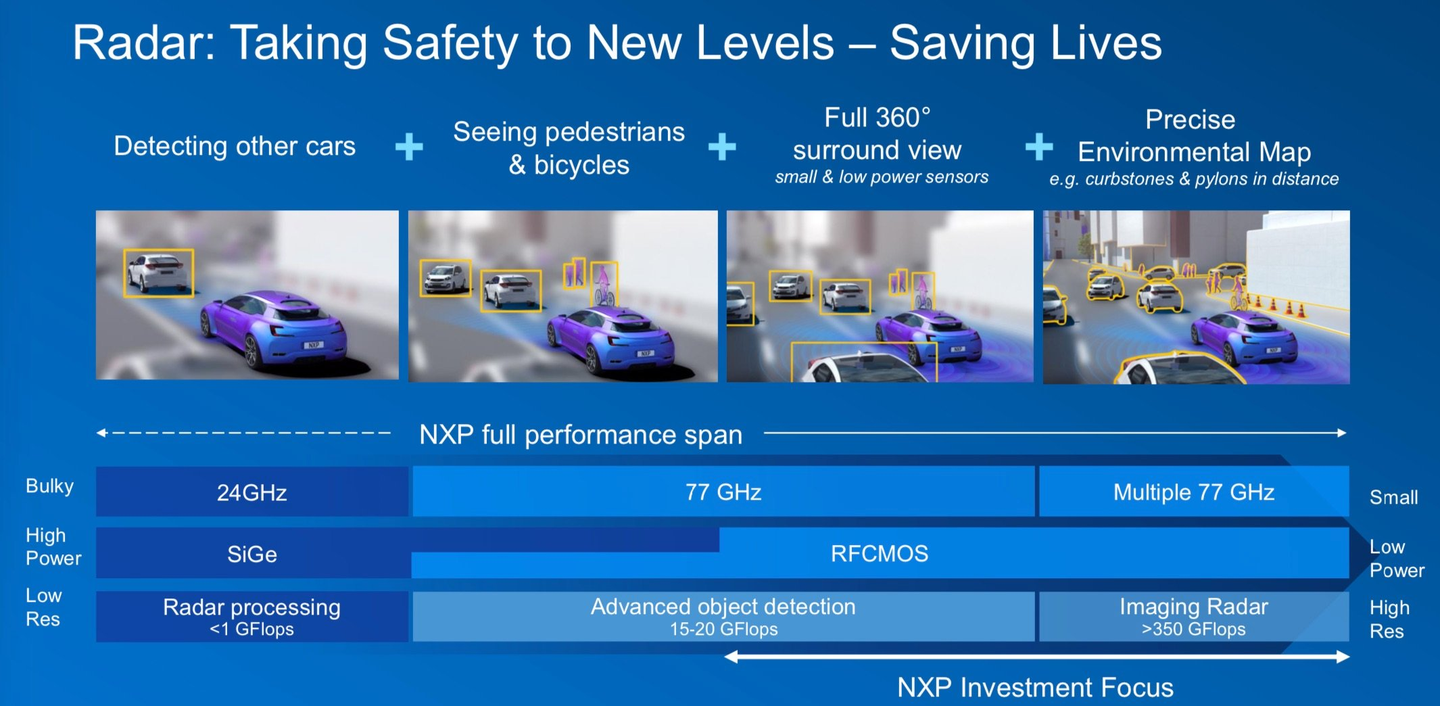 图8 NXP提出的要上分布式雷达的原因
图8 NXP提出的要上分布式雷达的原因
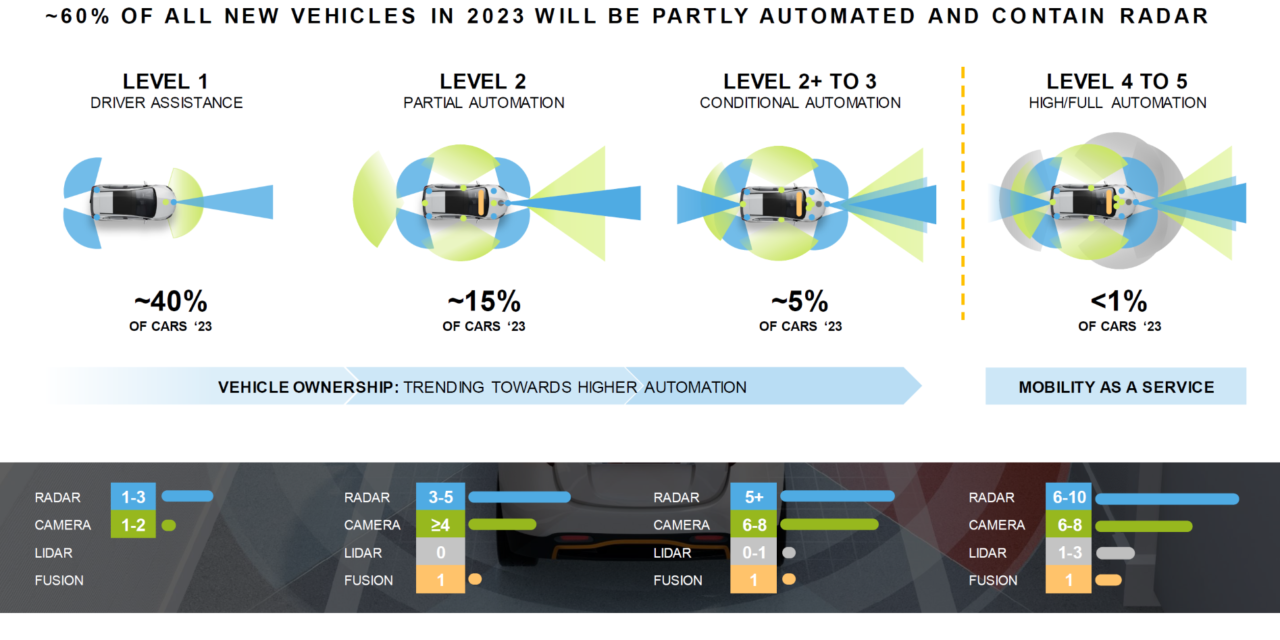 图9 NXP提出的要上分布式雷达的原因
图9 NXP提出的要上分布式雷达的原因
小结:
为什么要向分布式卫星或者称为centralized radar processing反正,图8和图9的NXP slides提出了一个更为根本的原因:自动驾驶L3-L5发展的强需求。
-
360°雷达覆盖和360°camera覆盖,形成两大传感器的异形冗余;
-
雷达数量要增加,实现360°强覆盖;
-
雷达成本要降低,以抵消雷达数量增强的影响;
-
雷达直接输出目标参数给中央域控已经不够,需要雷达输出更原始的数据和点云数据给中央域控,由中央域控进行处理,形成算法上的覆盖增强。
以上才是分布式卫星雷达为什么会成为后续主流自动驾驶传感器配置的一个根本原因。