文章目录
- [1.1 引言](#1.1 引言)
- [1.2 基本术语](#1.2 基本术语)
- [1.3 假设空间](#1.3 假设空间)
- [1.4 归纳偏好](#1.4 归纳偏好)
1.1 引言
什么是机器学习(Machine Learning)?
机器学习是这样一门学科,它致力于研究如何通过计算的手段,利用经验来改善系统自身的性能 ,在计算机系统中,"经验"通常以"数据"形式存在,因此,机器学习所研究的主要内容,是关于在计算机上从数据中产生"模型"(model)的算法,即"学习算法"(learning algorithm).有了学习算法,我们把经验数据提供给它,它就能基于这些数据产生模型;在面对新的情况时(例如看到一个没剖开的西瓜),模型会给我们提供相应的判断(例如好瓜),如果说计算机科学是研究关于"算法"的学问,那么类似的,可以说机器学习是研究关于"学习算法"的学问。
Mitchell, 1997 给出了一个更形式化的定义: 假设用 P 来评估计算机程序在某任务类 T 上的性能,若一个程序通过利用经验 E 在 T 中任务丰获得了性能改善, 则我们就说关于 T 和 P , 该程序对 E 进行了学习.
本书用 "模型"泛指从数据中学得的结果.
1.2 基本术语
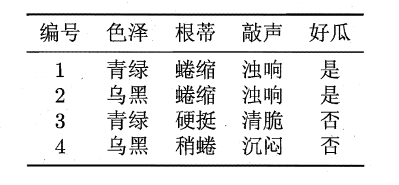
假定我们收集了一批关于西瓜的数据, 例如(色泽=青绿; 根蒂=蜷缩; 敲声=浊响), (色泽=乌黑; 根蒂=稍蜷; 敲声=沉闷), (色泽=浅白; 根蒂=硬挺; 敲声=清脆), ......, 每对括号内是一条记录, "="意思是"取值为".
| 术语 | 含义 | 示例 | 数学描述 |
|---|---|---|---|
| 数据集 (data set) | 一组记录的集合 | 一批关于西瓜的数据 | D = { x 1 , x 2 , ⋯ , x m } D = \left \{ \boldsymbol{x}_1, \boldsymbol{x}_2, \cdots, \boldsymbol{x}_m \right \} D={x1,x2,⋯,xm} |
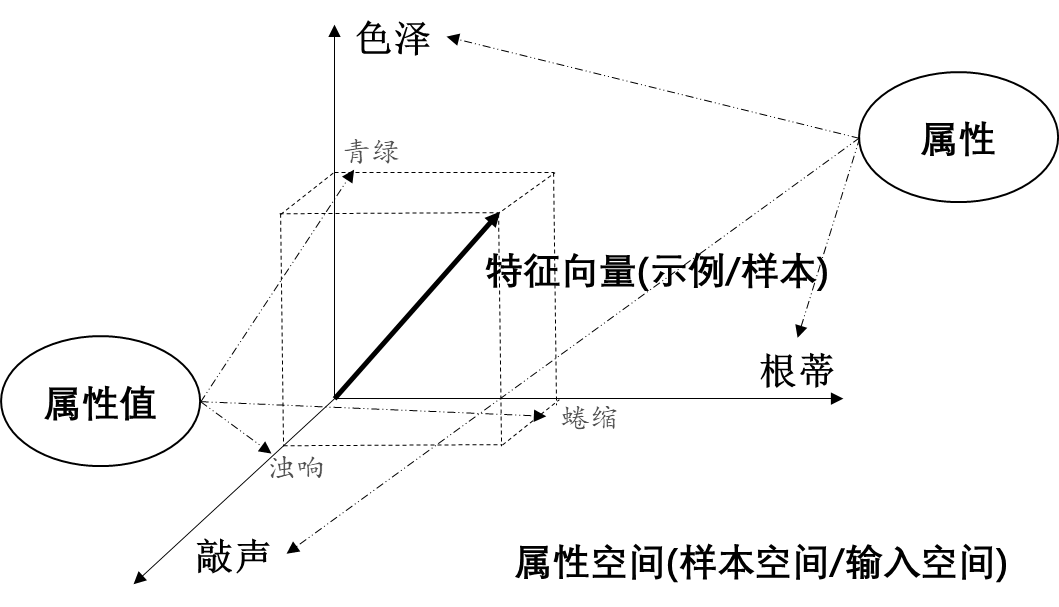
| 示例 (instance) / 样本 (sample) / 特征向量 (feature vector) | 关于一个事件或对象的描述 | (色泽=青绿; 根蒂=蜷缩; 敲声=浊响) / 属性张成空间中的每个点对应的一个坐标向量 | x i = ( x i 1 ; x i 2 ; ⋯ , x i d ) \boldsymbol{x}i = (x{i1}; x_{i2}; \cdots, x_{id}) xi=(xi1;xi2;⋯,xid) |
| 属性 (attribute) / 特征 (feature) | 反映事件或对象在某方面的表现或性质的事项 | 色泽, 根蒂, 敲声 | x i j x_{ij} xij是 x i \boldsymbol{x}_i xi的第 j j j个属性对应的取值 |
| 属性值 (attribute value) | 属性上的取值 | "青绿", "乌黑" | x i j x_{ij} xij |
| 属性空间 (attribute space) / 样本空间 (sample space) / 输入空间 | 属性张成的空间 | 把"色泽", "根蒂", "敲声"作为三个坐标轴,则它们张成一个用于描述西瓜的三维空间,每个西瓜都可在这个空间中找到自己的坐标位置 | d d d 维样本空间 X \mathcal{X} X |
| 学习(learning) / 训练 (training) | 从数据中学得模型 | - | - |
| 训练数据(training data) | 训练过程中使用的数据 | - | - |
| 训练样本(training sample) / 训练示例(training instance) | 训练数据中的每个样本 | - | - |
| 训练集(training set) | 训练样本组成的集合 | - | - |
| 假设(hypothesis) | 学得模型对应了关于数据的某种潜在的规律 | - | h ( x ) h(\boldsymbol{x}) h(x) |
| 真相 / 真实(ground-truth) | 潜在规律自身 | - | - |
| 学习器(learner) | 学习算法在给定数据和参数空间上的实例化 | - | - |
| 标记(label) | 关于示例结果的信息 | 好瓜 | y i ∈ Y y_i \in\mathcal{Y} yi∈Y |
| 样例(example) | 拥有了标记信息的示例 | ((色泽=青绿; 根蒂=蜷缩; 敲声=浊响),好瓜) | ( x i , y i ) (\boldsymbol{x}_i, y_i) (xi,yi) |
| 标记空间(label space)/输出空间 | 所有标记的集合 | - | Y \mathcal{Y} Y |
- 欲预测的是离散值, 此类学习任务称为分类(classification);
- 欲预测的是连续值, 此类学习任务称为回归(regression).
对于二分类 (binary classification)任务, 通常称其中一个类为"正类" (positive class), 另一个类为"反类"(negative class);
涉及多个类别时, 则称为多分类(multi-class classification)任务
学得模型后,使用其进行预测的过程称为测试 (testing), 被预测的样本称为测试样本(testing sample).
聚类 (clustering) : 将训练集中的西瓜分成若干组,每组称为一个簇(cluster)
根据 训练数据是否拥有标记信息,学习任务可大致划分为两大类:
- 有监督学习(supervised learning) : 分类, 回归;
- 无监督学习(unsupervised learning) : 聚类;
泛化能力: 学得模型适用于新样本的能力. 具有强泛化能力的模型能很好地适用于整个样本空间.
1.3 假设空间
归纳与演绎
归纳(induction)与演绎(deduction)是科学推理的两大基本手段.
前者是从特殊到一般的泛化 (generalization)过程,即从具体的事实归结出一般性规律;
后者是从一般到特殊的特化 (specialization)过程,即从基础原理推演出具体状况.
例如,在数学公理系统中,基于一组公理和推理规则推导出与之相洽的定理,这是演绎; 而"从样例中学习"显然是一个归纳的过程, 因此亦称"归纳学习" (inductive learning).
归纳学习
- 广义: 从样例中学习;
- 狭义: 从训练数据中学得概念(concept), 因此亦称为"概念学习"或"概念形成".
概念学习/概念生成
最基本的是布尔概念学习, 即对"是" "不是"这样的可表示为 0/1 布尔值的目标概念的学习.
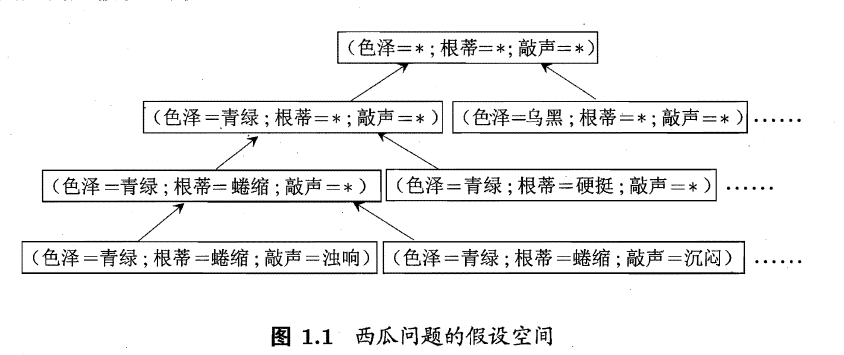
学习过程看作一个在所有假设(hypothesis)组成的空间中进行搜索的过程, 搜索目标是找到与训练集"匹配"(fit) 的假设, 即能够将训练集中的瓜判断正确的假设.假设的表示一旦确定, 假设空间及其规模大小就确定了.
假设空间大小的计算
以如何判断一个西瓜是不是好瓜问题为例, 假设这个西瓜是不是好瓜可以有三种属性确定,分别为"色泽","根蒂","敲声",同时每种属性有三种可能的情况,那么假设空间的规模是多少? 或者说在我们判断一个瓜是不是好瓜有多少种可能出现的情况?
假设每个属性有三种取值, 那么首先由简单的排列组合即可知道所有的属性情况为 3 × 3 × 3 3 \times 3 \times 3 3×3×3 种.
但是在这种判断中, 默认了一个瓜是不是好瓜, 需要通过对西瓜的三种属性进行判断, 然而也许判断一个瓜是不是好瓜,压根不需要三种属性的确定, 可能一种属性, 比如只要色泽乌黑的西瓜全是好瓜, 那么此时其他两种属性都不再需要,也就是可以表述为 ∗ * ∗,那么此时对每种属性的设置,除了我们给出的三种,我们还可以给出任意 ∗ * ∗, 这样我们就得到了 4 × 4 × 4 4 \times 4 \times 4 4×4×4 种.
上面都是判断一个瓜是不是好瓜, 那么我们默认这些假设中有总有好瓜的情况, 但是如果好瓜压根不存在, 那么好瓜的概念压根就不存在, 我们用 ∅ \emptyset ∅ 表示这个假设. 则我们面临的假设空间规模大小为 4 × 4 × 4 + 1 = 65 4 \times 4 \times 4 + 1=65 4×4×4+1=65.
假定有 k k k 种属性, 每种属性的取值各有 n 1 , n 2 , ⋯ , n k n_1,n_2, \cdots, n_k n1,n2,⋯,nk种, 则该问题假设空间大小为:
( n 1 + 1 ) × ( n 2 + 1 ) × ⋯ × ( n k + 1 ) + 1 (n_1+1)\times(n_2+1)\times\cdots\times(n_k+1)+1 (n1+1)×(n2+1)×⋯×(nk+1)+1
参考 假设空间规模计算
搜索策略
自顶向下、从一般到特殊, 或是自底向上、从特殊到一般
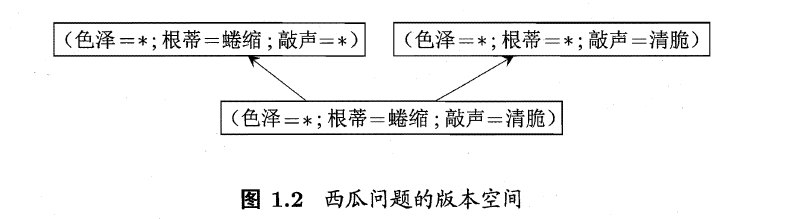
版本空间
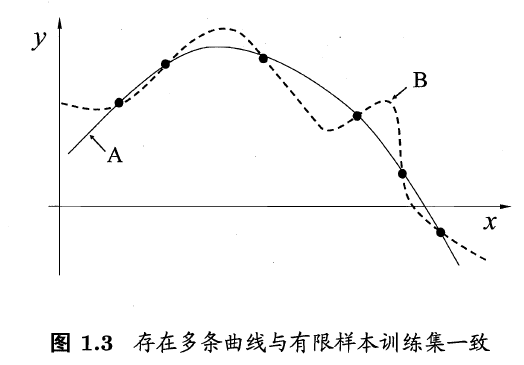
可能有多个假设与训练集一致,即存在着一个与训练集一致的"假设集合",我们称之为"版本空间" (version space). 与西瓜数据集对应的版本空间如下
1.4 归纳偏好
机器学习算法在学习过程中对某种类型假设的偏好,称为"归纳偏好" (inductive bias), 或简称为"偏好". 任何一个有效的机器学习算法必有其归纳偏好, 否则它将被假设空间中看似在训练集上"等效"的假设所迷惑, 而无法产生确定的学习结果.
奥卡姆剃刀 (Occam's razor)是一种常用的, 自然科学研究中最基本的原则来引导算法确立"正确的"偏好,即"若有多个假设与观察一致,则选最简单的那个".
"没有免费的午餐"定理(No Free Lunch Theorem,简称 NFL 定理)
假设样本空间 X \mathcal{X} X 和假设空间 H \mathcal{H} H 都是离散的. 令 P ( h ∣ X , L a ) P(h \mid X, \mathfrak{L}_a) P(h∣X,La) 代表算法 L a \mathfrak{L}a La 基于训练数据 X X X 产生假设 h h h 的概率,再令 f f f 代表我们希望学习的真实目标函数. L a \mathfrak{L}a La 的 "训练集外误差",即 L a \mathfrak{L}a La在训练集之外的所有样本 上的误差为:
E o t e ( L a ∣ X , f ) = ∑ h ∑ x ∈ X − X P ( x ) I ( h ( x ) ≠ f ( x ) ) P ( h ∣ X , L a ) E{ote}(\mathfrak{L}{a} \mid X, f) = \sum_h \sum{\boldsymbol{x}\in\mathcal{X}-X}P(\boldsymbol{x})\mathbb{I}(h(\boldsymbol{x})\neq f(\boldsymbol{x}))P(h \mid X, \mathfrak{L}_a) Eote(La∣X,f)=h∑x∈X−X∑P(x)I(h(x)=f(x))P(h∣X,La)
其中 I ( ⋅ ) \mathbb{I}(\cdot) I(⋅)是指示函数,若 ⋅ \cdot ⋅ 为真则取值1,否则取值0.
考虑二分类问题, 且真实目标函数可以是任何函数 X ↦ { 0 , 1 } \mathcal{X} \mapsto \left \{0, 1 \right \} X↦{0,1},函数空间为 { 0 , 1 } ∣ X ∣ \left \{0, 1 \right \}^{|\mathcal{X}|} {0,1}∣X∣. 对所有可能的 f f f 按均匀分布 对误差求和, 有
∑ f E o t e ( L a ∣ X , f ) = ∑ f ∑ h ∑ x ∈ X − X P ( x ) I ( h ( x ) ≠ f ( x ) ) P ( h ∣ X , L a ) = ∑ x ∈ X − X P ( x ) ∑ h P ( h ∣ X , L a ) ∑ f I ( h ( x ) ≠ f ( x ) ) = ∑ x ∈ X − X P ( x ) ∑ h P ( h ∣ X , L a ) 1 2 2 ∣ X ∣ = 1 2 2 ∣ X ∣ ∑ x ∈ X − X P ( x ) ∑ h P ( h ∣ X , L a ) = 2 ∣ X ∣ − 1 ∑ x ∈ X − X P ( x ) ⋅ 1 \begin{align} \sum_f E_{ote}(\mathfrak{L}{a} \mid X, f) &= \sum_f \sum_h \sum{\boldsymbol{x}\in\mathcal{X}-X}P(\boldsymbol{x})\mathbb{I}(h(\boldsymbol{x})\neq f(\boldsymbol{x}))P(h \mid X, \mathfrak{L}a) \\ &= \sum{\boldsymbol{x}\in\mathcal{X}-X} P(\boldsymbol{x})\sum_hP(h \mid X, \mathfrak{L}a)\sum_f\mathbb{I}(h(\boldsymbol{x})\neq f(\boldsymbol{x}))\\ &=\sum{\boldsymbol{x}\in\mathcal{X}-X} P(\boldsymbol{x})\sum_hP(h \mid X, \mathfrak{L}a)\frac{1}{2}2^{|\mathcal{X}|}\\ &=\frac{1}{2}2^{|\mathcal{X}|}\sum{\boldsymbol{x}\in\mathcal{X}-X} P(\boldsymbol{x})\sum_hP(h \mid X, \mathfrak{L}a)\\ &= 2^{|X|-1}\sum{\boldsymbol{x}\in\mathcal{X}-X} P(\boldsymbol{x})\cdot 1 \end{align} f∑Eote(La∣X,f)=f∑h∑x∈X−X∑P(x)I(h(x)=f(x))P(h∣X,La)=x∈X−X∑P(x)h∑P(h∣X,La)f∑I(h(x)=f(x))=x∈X−X∑P(x)h∑P(h∣X,La)212∣X∣=212∣X∣x∈X−X∑P(x)h∑P(h∣X,La)=2∣X∣−1x∈X−X∑P(x)⋅1
其中, E E E 表示期望, o t e _{ote} ote 表示训练集外误差, P ( x ) P(\boldsymbol{x}) P(x) 表示每种组合的概率.
此处证明可能较难理解, 这里参考博客 机器学习公式推导【Day1】NFL定理 给出详细解释
式 ( 1 ) (1) (1)将误差式对 f f f 进行求和, 对比误差表达式和式 ( 1 ) (1) (1)即可理解.
式 ( 2 ) (2) (2)对式 ( 1 ) (1) (1)的重新排列, 将仅与 x , f , h \boldsymbol{x}, f, h x,f,h 各自有关的函数分离.
式 ( 3 ) (3) (3)主要计算了
∑ f I ( h ( x ) ≠ f ( x ) ) = 1 2 2 ∣ X ∣ \sum_f\mathbb{I}(h(\boldsymbol{x})\neq f(\boldsymbol{x}))=\frac{1}{2}2^{|\mathcal{X}|} f∑I(h(x)=f(x))=212∣X∣
这个结果首先需要明白 f f f是任何能将样本映射到 { 0 , 1 } \{0,1\} {0,1}的函数且为均匀分布 , 也即不止有一个 f f f 且每个 f f f 出现的概率相等. 假设样本空间 X = { x 1 , x 2 } \mathcal{X} = \{\boldsymbol{x}_1, \boldsymbol{x}_2\} X={x1,x2}, 即 ∣ X ∣ = 2 |\mathcal{X}|=2 ∣X∣=2 , 那么所有 f f f为
f 1 : f 1 ( x 1 ) = 0 , f 1 ( x 2 ) = 0 f 2 : f 2 ( x 1 ) = 0 , f 2 ( x 2 ) = 1 f 3 : f 3 ( x 1 ) = 1 , f 3 ( x 2 ) = 0 f 4 : f 4 ( x 1 ) = 1 , f 4 ( x 2 ) = 1 \begin{align*} f_1&:f_1(\boldsymbol{x}_1)=0,f_1(\boldsymbol{x}_2)=0\\ f_2&:f_2(\boldsymbol{x}_1)=0,f_2(\boldsymbol{x}_2)=1\\ f_3&:f_3(\boldsymbol{x}_1)=1,f_3(\boldsymbol{x}_2)=0\\ f_4&:f_4(\boldsymbol{x}_1)=1,f_4(\boldsymbol{x}_2)=1 \end{align*} f1f2f3f4:f1(x1)=0,f1(x2)=0:f2(x1)=0,f2(x2)=1:f3(x1)=1,f3(x2)=0:f4(x1)=1,f4(x2)=1
共有 2 ∣ X ∣ = 2 2 = 4 2^{|\mathcal{X}|}=2^2=4 2∣X∣=22=4个真实目标函数. 所以此时通过算法 L a \mathfrak{L}_{a} La学习出来的模型 h ( x ) h(\boldsymbol{x}) h(x)对每个样本无论预测值为0还是1必然有一半的 f f f与之预测值相等,例如,现在学出来的模型 x 1 \boldsymbol{x}_1 x1的预测值为1,也即 h ( x 1 ) h ( \boldsymbol{x}_1) h(x1), 那么有且只有 f 3 f_3 f3 和 f 4 f_4 f4与 h ( x 1 ) h ( \boldsymbol{x}_1) h(x1)的值相等, 也就是有且只有一半的 f f f 与它预测值相等, 所以 ∑ f I ( h ( x ) ≠ f ( x ) ) = 1 2 2 ∣ X ∣ \sum_f\mathbb{I}(h(\boldsymbol{x})\neq f(\boldsymbol{x}))=\frac{1}{2}2^{|\mathcal{X}|} ∑fI(h(x)=f(x))=212∣X∣
式 ( 4 ) (4) (4)仅进行了移项操作.
式 ( 5 ) (5) (5)是由于所有可能事件的概率之和为1, 故有 ∑ h P ( h ∣ X , L a ) = 1 \sum_hP(h \mid X, \mathfrak{L}_a)=1 ∑hP(h∣X,La)=1 .
该定理表明总误差与学习算法无关.
值得一提的是, 在这里我们定义真实的目标函数为任何能将样本映射到 { 0 , 1 } \{0,1\} {0,1} 的函数且为均匀分布 ,但是实际情形并非如此,通常我们只认为能高度拟合已有样本数据的函数才是真实目标函数,例如,现在已有的样本数据为 { ( x 1 , 0 ) , ( x 2 , 0 ) } \left\{\left(\boldsymbol{x}{1}, 0\right),\left(\boldsymbol{x}{2}, 0\right)\right\} {(x1,0),(x2,0)}, 由于没有收集到或者压根不存在 { ( x 1 , 1 ) , ( x 2 , 0 ) } , { ( x 1 , 1 ) , ( x 2 , 1 ) } \left\{\left(\boldsymbol{x}{1}, 1\right),\left(\boldsymbol{x}{2}, 0\right)\right\},\left\{\left(\boldsymbol{x}{1}, 1\right),\left(\boldsymbol{x}{2}, 1\right)\right\} {(x1,1),(x2,0)},{(x1,1),(x2,1)}这类样本,所以 f 1 , f 3 , f 4 f_1, f_3, f_4 f1,f3,f4都不算是真实目标函数.
所以, NFL 定理最重要的寓意是让我们清楚地认识到,脱离具体问题,空泛地谈论"什么学习算法更好" 毫无意义, 因为若考虑所有潜在的问题, 则所有学习算法都一样好.要谈论算法的相对优劣, 必须要针对具体的学习问题; 在某些问题上表现好的学习算法, 在另一些问题上却可能不尽如人意, 学习算法自身的归纳偏好与问题是否相配, 往往会起到决定性的作用.