注意
看了作者链接发现不能复制,原因可能是缺少公钥,需要添加
参考
bash
https://blog.csdn.net/Liumy93/article/details/130158527?fromshare=blogdetail&sharetype=blogdetail&sharerId=130158527&sharerefer=PC&sharesource=m0_56093217&sharefrom=from_link安装步骤流程
bash
sudo apt-get install libglfw3-dev libglew-dev
bash
mkdir -p marsim_ws/src
cd marsim_ws/src
git clone -b ubuntu20 https://github.com/hku-mars/MARSIM.git
cd ..
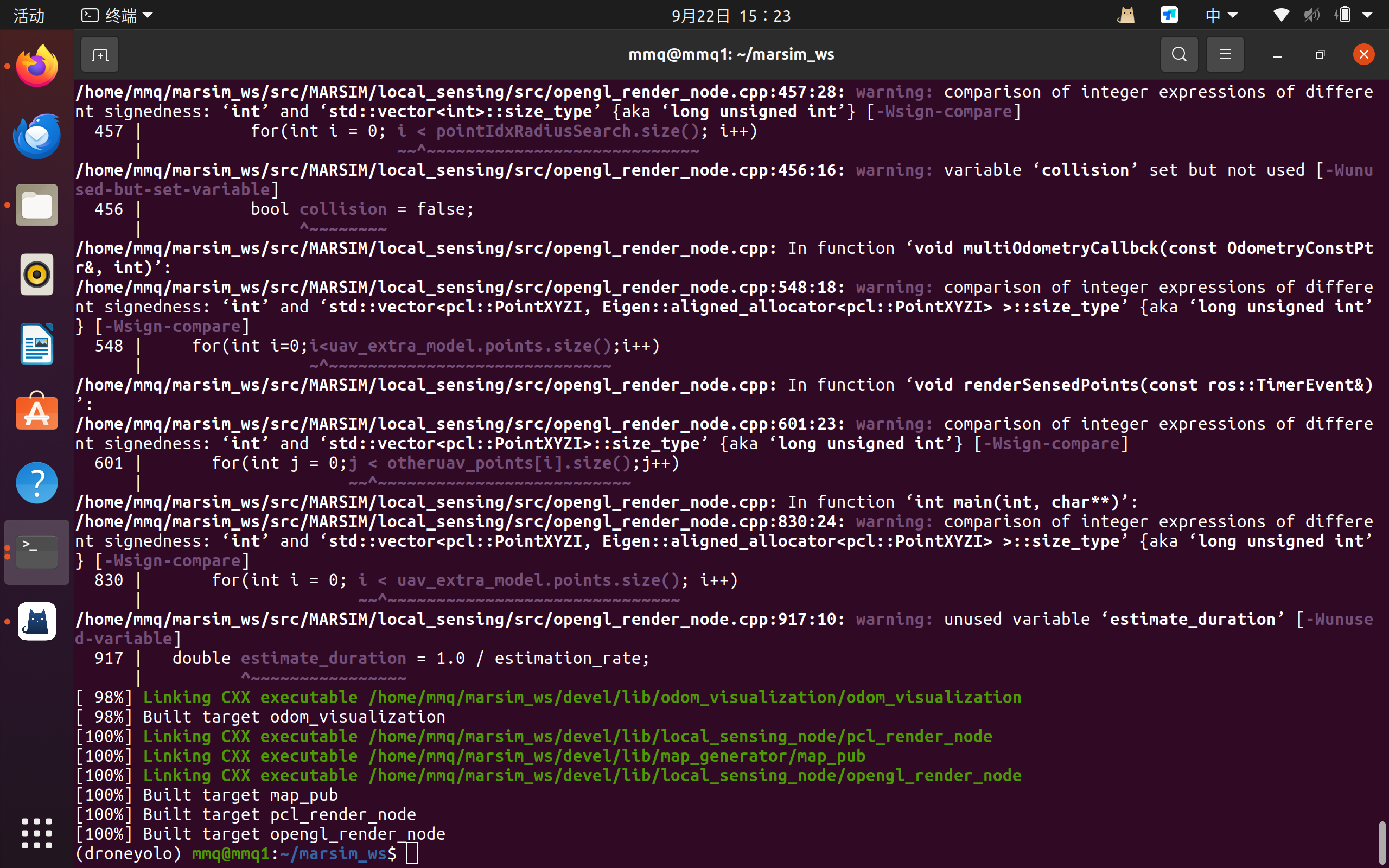
catkin_make成功后截图
运行效果
bash
source devel/setup.bash
roslaunch test_interface single_drone_avia.launch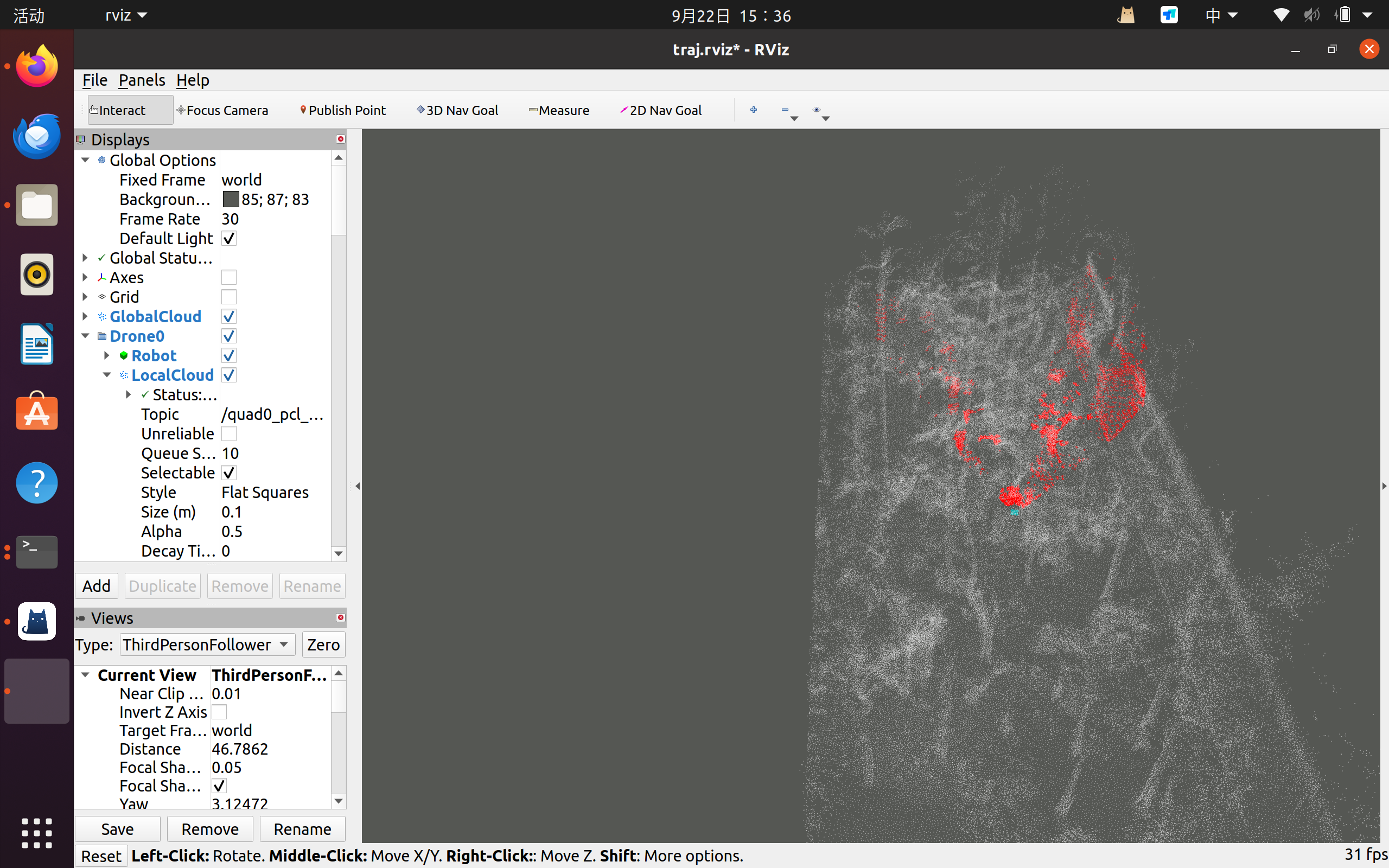
bash
source devel/setup.bash
roslaunch test_interface single_drone_mid360_dynobs.launch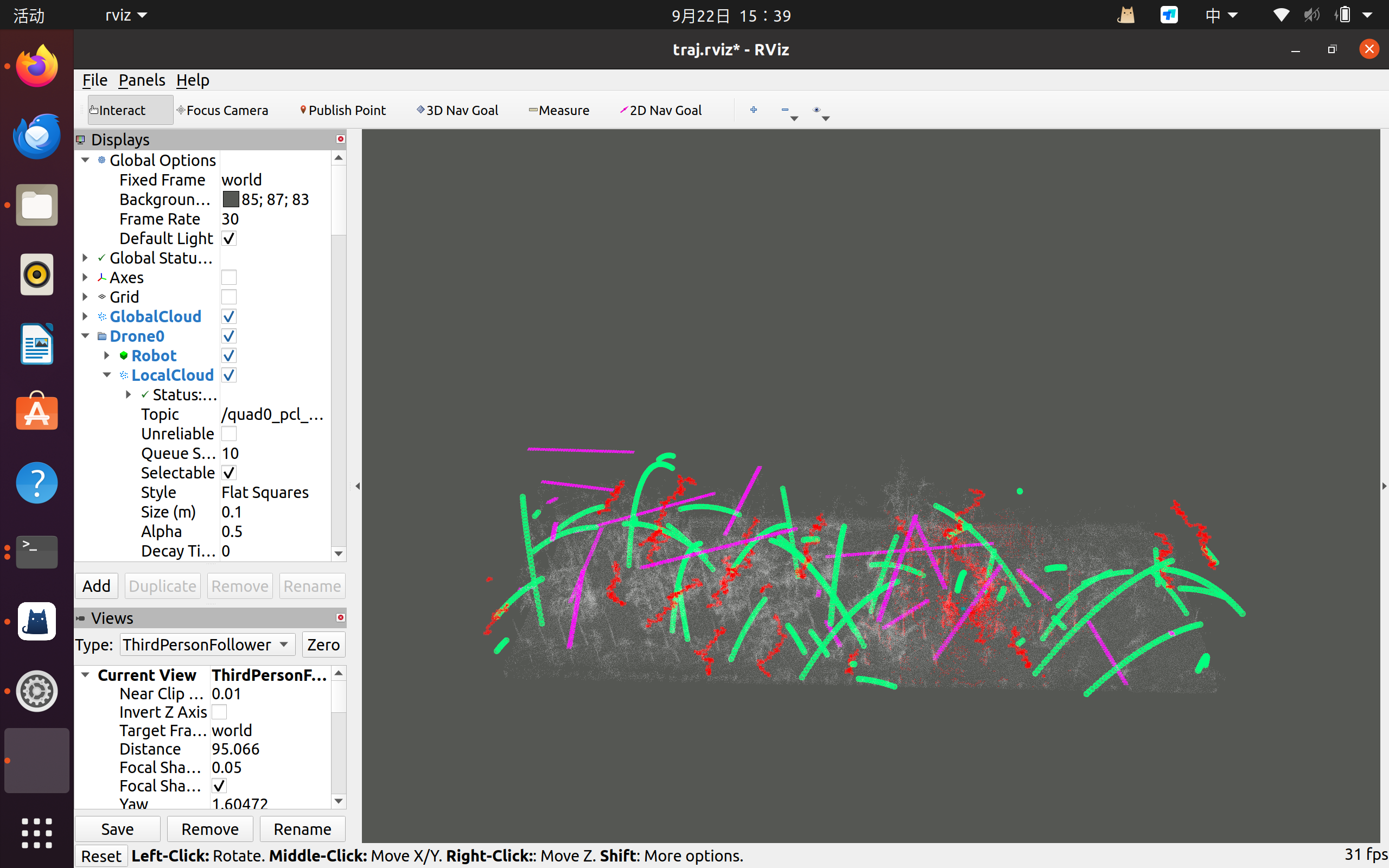
bash
source devel/setup.bash
roslaunch exploration_manager exploration.launch这里发现Fuel需要安装现在需要安装
bash
git clone -b v2.7.1 https://github.com/stevengj/nlopt.git
cd nlopt
mkdir build
cd build
cmake ..
make
sudo make install
bash
sudo apt-get install libarmadillo-dev
bash
cd ${YOUR_WORKSPACE_PATH}/src
git clone git@github.com:HKUST-Aerial-Robotics/FUEL.git
cd ../
catkin_make换成
bash
git clone https://github.com/HKUST-Aerial-Robotics/FUEL.git
bash
source devel/setup.bash && roslaunch exploration_manager rviz.launch
bash
source devel/setup.bash && roslaunch exploration_manager exploration.launch发现MARSIM和FUEL放在一个工作空间了冲突,无法运行
bash
mkdir -p ~/fuel_ws/src
cd ~/fuel_ws/src
# 放 FUEL
mv ~/marsim_ws/src/FUEL .
cd ..
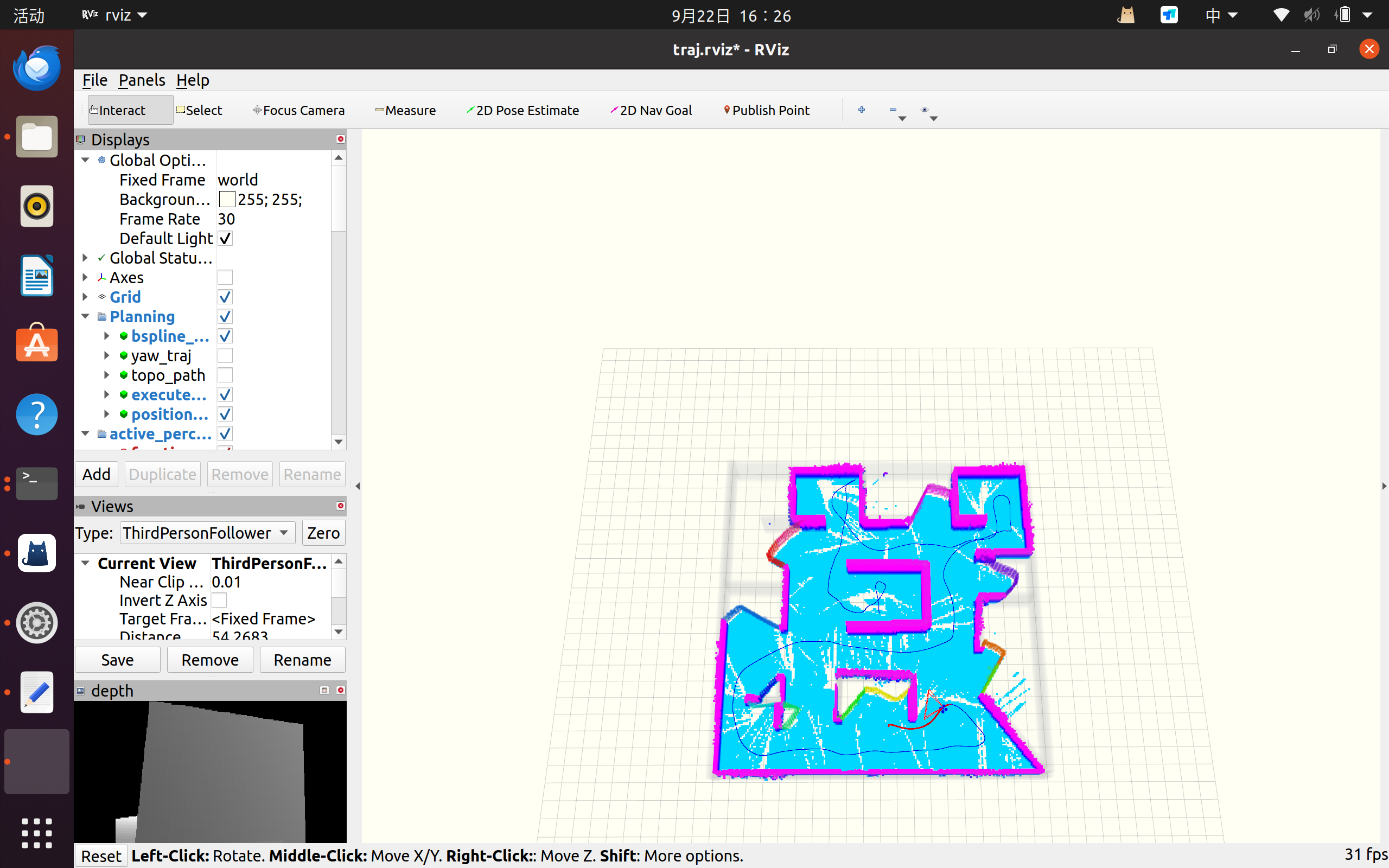
catkin_make现在运行了发现是这样的
 再试一下:
再试一下:
在FUEL里面改动:
发现如果要改动:
map_generator/resource文件夹添加点云图片
simulator.xml里面修改
bash
<!-- Change office.pcd to specify the exploration environment -->
<!-- We provide office.pcd, office2.pcd, office3.pcd and pillar.pcd in this repo -->
<node pkg ="map_generator" name ="map_pub" type ="map_pub" output = "screen" args="$(find map_generator)/resource/office.pcd"/> exploration.launch里面增加:
bash
<arg name="box_min_x" value="-10.0"/>
<arg name="box_min_y" value="-15.0"/>
<arg name="box_min_z" value=" 0.0"/>
<arg name="box_max_x" value="10.0"/>
<arg name="box_max_y" value="15.0"/>
<arg name="box_max_z" value=" 2.0"/>怎么创建一个点云环境教程
bash
rosrun map_generator click_map保存
bash
rosrun map_generator map_recorder ~/发现是自己问题,不是断开运行的
开终端运行
bash
source devel/setup.bash && roslaunch exploration_manager rviz.launch再开终端运行
bash
source devel/setup.bash && roslaunch exploration_manager exploration.launch