标题
A physics-informed neural network workflow for forward and inverse modeling of unsaturated flow and root water uptake from hydrogeophysical data
背景
作者
Caner Sakar, Kuzma Tsukanov , Nimrod Schwartz , Ziv Moreno
期刊来源
Journal of hydrology
DOI
10.1016/j.jhydrol.2025.134675
摘要
了解根系水分吸收对可持续农业至关重要,但量化其在田间的时空动态仍然是一个挑战。传统的方法要么依赖于稀疏点测量,而忽略了空间异质性,要么依赖于需要预先规定RWU数学形式的数值模型,从而限制了表征复杂植物-土壤相互作用的能力。本研究引入一种物理信息神经网络(PINN),从水文地球物理数据中直接推断RWU。我们模拟了一个合成基准,其中一个数值模型生成了一个高分辨率的土壤水动力学数据集。模拟了真实但不完善的现场观测,包括电阻率层析图和稀疏点传感器数据。利用这些数据训练双输出PINN,在没有先验假设的情况下,同时重建高分辨率土壤饱和度场,并预测未知的RWU函数和空间分布。结果表明,PINN重构土壤饱和场具有较高的精度(R2 = 0.98,RMSE = 0.035),优于ERT数据作为输入。虽然无约束PINN定
性地恢复了未知RWU项的时空分布,但结合物理可测量的总日蒸腾约束改进了推断,将日蒸腾RMSE降低了约88%,将局部RWU误差降低到5%以下。此外,PINN成功地恢复了水分胁迫与吸收之间的潜在函数关系,估计了关键的Feddes应力响应参数,误差为2%。该方法也被证明具有鲁棒性,在提供受扰动的水力参数和噪声数据时保持高精度(R2 = 0.97,RMSE = 0.044),突出了其在实际应用中的潜力。
研究区域以及数据来源
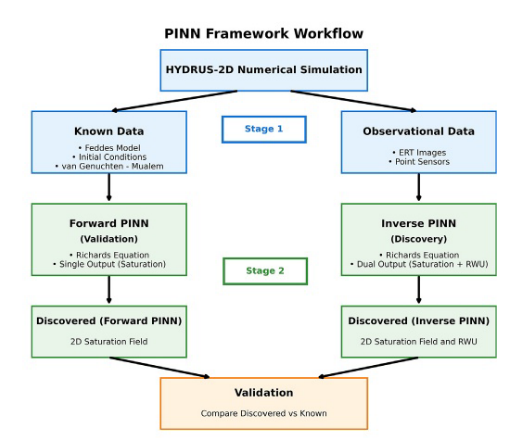
使用经过验证的数值模型HYDRUS-2D和规定的Feddes RWU函数来生成高分辨率的"地面真实"数据集。由此,产生了真实但不完美的"观测数据",包括平滑的ERT图像和稀疏的点传感器测量。网络仅使用不完善的观测数据同时推断土壤饱和场和未知RWU分布。数据工作流程如图所示。
算法
第一阶段:综合实验-数值模拟
在将该方法应用于无法获得完整地下信息的现场情况之前,该综合实验旨在根据已知的地面事实验证PINN预测。验证有三个主要目标:首先,确认当所有过程都规定时,网络架构可以准确地求解Richards方程;第二,验证自适应训练策略收敛到物理上有意义的解;第三,建立一个性能基准来评估反问题的增加复杂性,其中RWU必须与土壤水动力学同时预测。
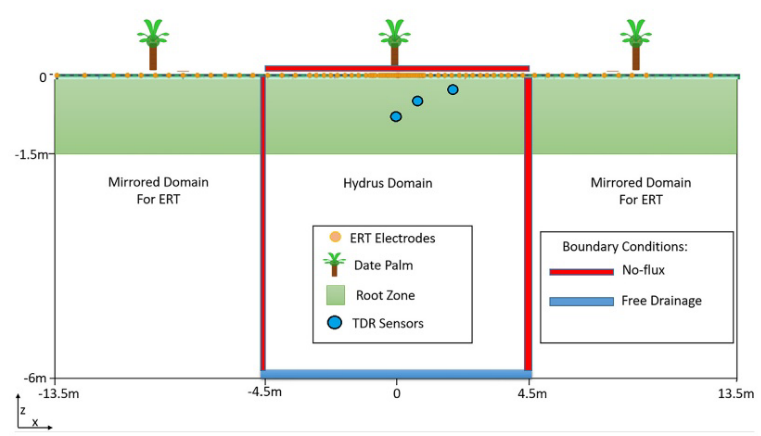
首先进行域配置,合成实验代表了一个使用9米×6 m土壤域的枣椰树种植园,建模为以单棵树为中心的垂直截面。该域以约0.045 m节点间距(10,000个节点,19,502个元素)的三角形有限元网格离散化。坐标系统定义为土壤表面的位置为(≤0.0 m),树干的位置为(≤0.0 m)。根系吸水量集中在土壤剖面的上方1.5 m(≥0.0 ~≥- 1.5 m),该深度既代表成熟枣椰树的主根活动力区,又与地表ERT调查的典型调查深度相匹配。
然后进行HYDRUS-2D仿真。地面真实数据集是使用HYDRUS-2D 生成的,这是一个广泛验证的有限元模型,用于模拟可变饱和多孔介质中的水流和溶质运移。表1总结了模拟中使用的土壤水力、根系吸收和岩石物性参数。虽然实验是合成的,但选择这些参数值是为了反映现实的种植园环境,并在现实的现场条件下测试工作流程。
再合成ert衍生的饱和生成。ert衍生的饱和场使用完整的正逆建模工作流程生成。首先,使用
Waxman - Smits岩石物理模型将HYDRUS饱和场转换为整体电导率:
其中σBS/m为土壤的体电导率, m3/m3为孔隙度,SW是含水饱和度,Mc为胶结指数,Ns为饱和指数,σWS/m为孔隙水电导率,σSS/m为表面电导率项。
m3/m3为孔隙度,SW是含水饱和度,Mc为胶结指数,Ns为饱和指数,σWS/m为孔隙水电导率,σSS/m为表面电导率项。
算法再现了ert衍生图像的典型空间平滑和正则化伪影。如下。
反演最小化加权最小二乘失拟,并在归一化RMS失拟达到目标值1.0时停止:
式中Nis为数据点个数,DIobs和DIcal为观测和计算数据。最后进行点传感测量。
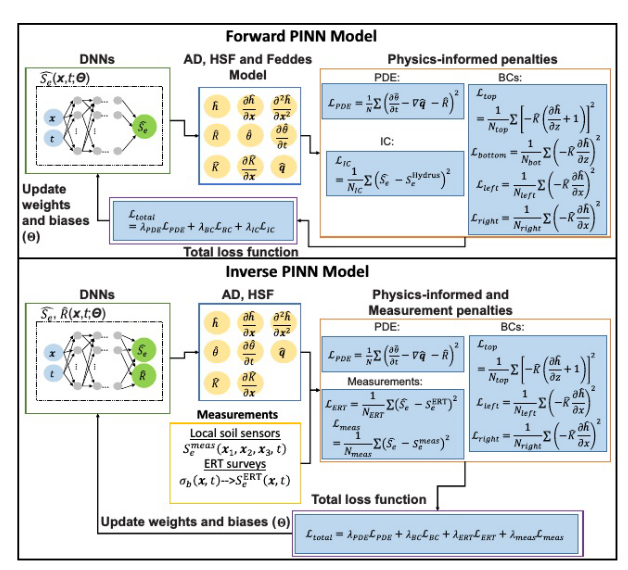
第二阶段:物理信息神经网络工作流
在第二阶段,实施了物理信息神经网络(PINN)框架,以评估其重建土壤水动力学和从合成观测数据推断未知RWU模式的能力。
在正向模式下,RWU函数是根据Feddes模型规定的,PINN只负责重建土壤饱和场。这可以作为网络在已知条件下求解理查兹方程的能力的基线验证。在逆模式下,RWU函数是未知的,必须直接从不完全数据(ert导出的饱和图像和稀疏点传感器测量)中推断出来,同时受到理查兹方程的约束。
PINN采用双输出架构同时预测土壤饱和度和推断RWU动态。该网络由共享隐藏层组成(四个隐藏层,每个隐藏层64个神经元,使用双曲正切激活),然后是两个专门的输出分支。选择tanh激活是因为它是光滑的和无限可微的,允许通过自动微分精确计算PDE残差所需的高阶导数。在训练过程中,每隔一层引入残差连接来改善梯度流。饱和输出分支使用s形激活将预测值约束为0,1,而RWU输出分支使用缩放的s形激活将摄取值限制为0,Rmax]。训练通过8个自适应周期进行。每个循环由1000个epoch组成,然后是一个重采样步骤,将搭配点集中在具有最大PDE残差的时空区域中。这种自适应采样策略将计算精力集中在最难满足控制方程的地方,从而提高了收敛性和物理一致性。所有计算都在PyTorch中实现。
反问题的制定是为了直接从观测数据预测未知的RWU动力学,同时与Richards方程保持一致。训练域被限制在根区,集中计算RWU信号最强的地方。与前向的情况不同,网络没有接收到关于Feddes模型的信息;相反,它只能从ert导出的饱和场、稀疏点传感器测量和物理约束中推断RWU模式。更重要的是,没有提供真实的初始地下状态,网络仅在不完美的观测数据上进行训练,以模拟现实的现场条件。如下所示。
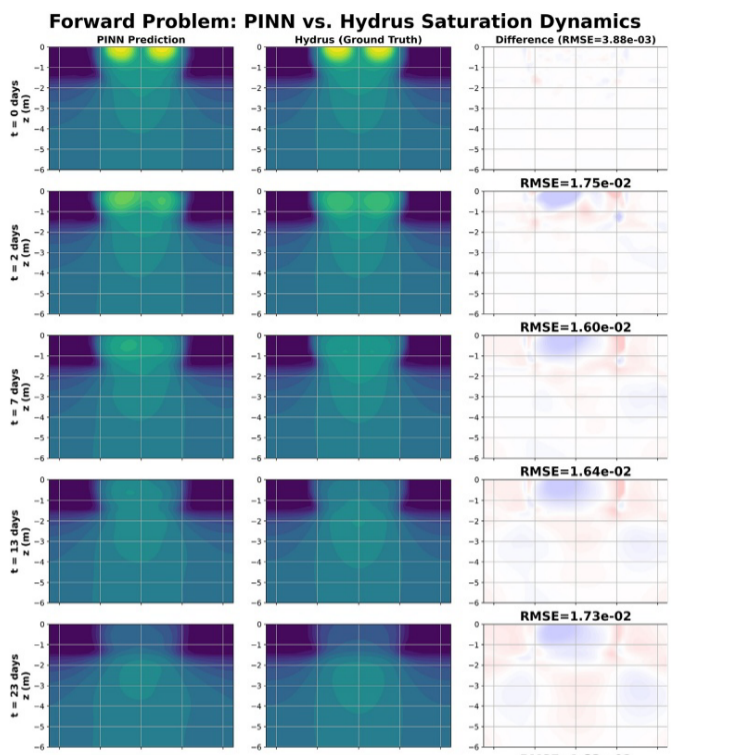
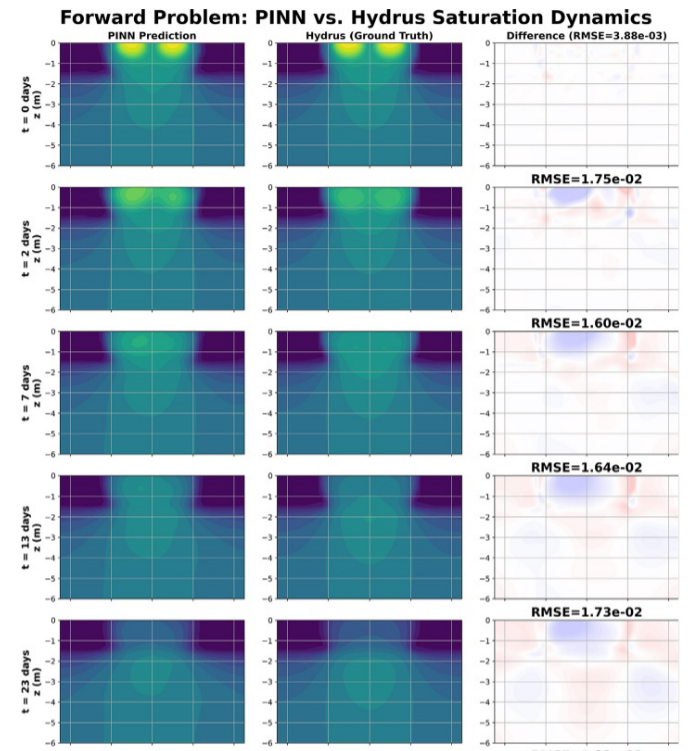
前向逆向验证
前向验证:在该测试中,使用HYDRUS-2D模拟的已知初始条件和边界条件训练单输出PINN。
同样有逆向对比
我们进一步研究了PINN是否可以在没有任何先验假设的情况下推断土壤含水量和吸收率之间的函数关系。通过绘制推断的吸收率与所有时间步长的预测饱和度,特征应力响应关系从观测数据和理查兹方程施加的物理约束的相互作用中出现。如下图所示。
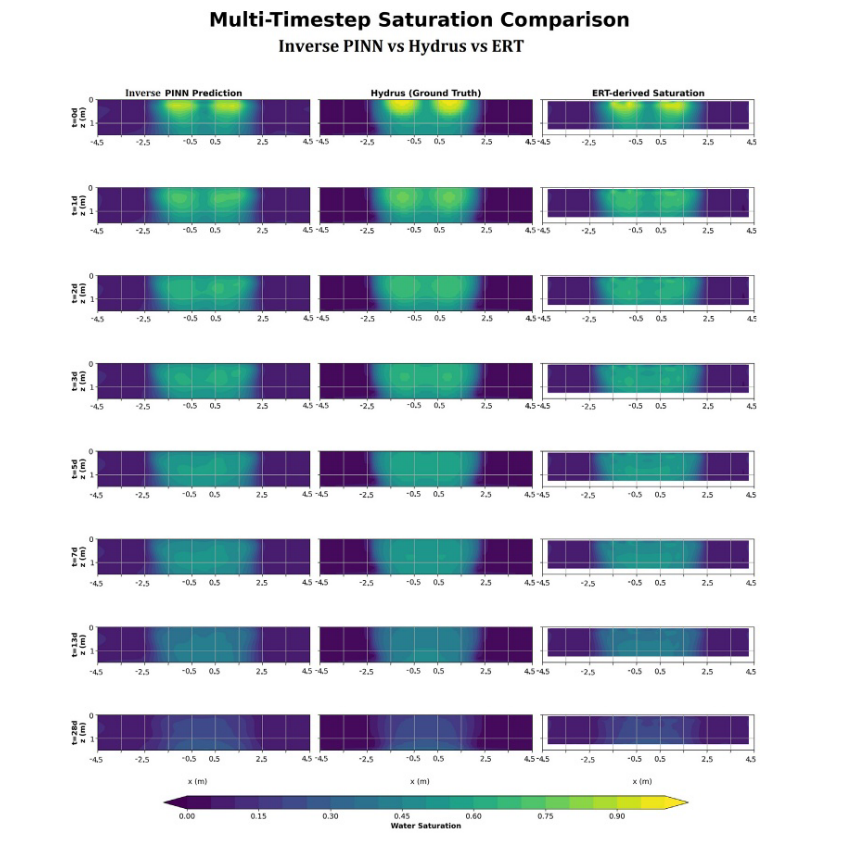
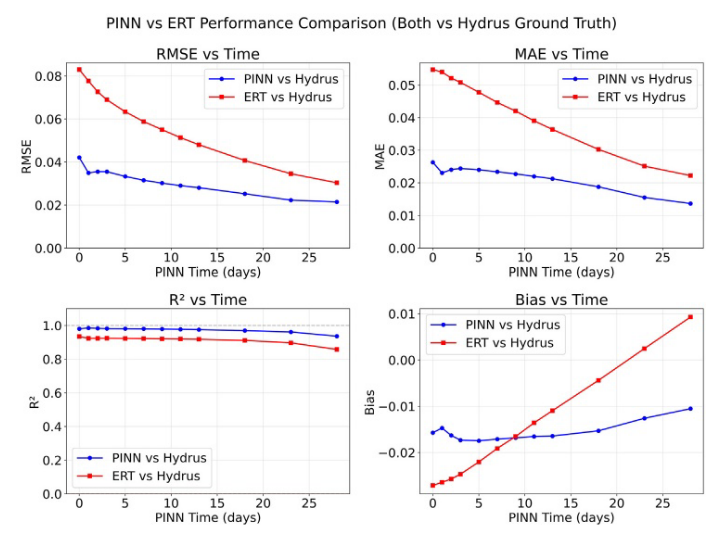
PINN饱和度预测和ert导出饱和度的定量性能指标,都与HYDRUS在28天模拟期间的地面真实情况进行了比较。
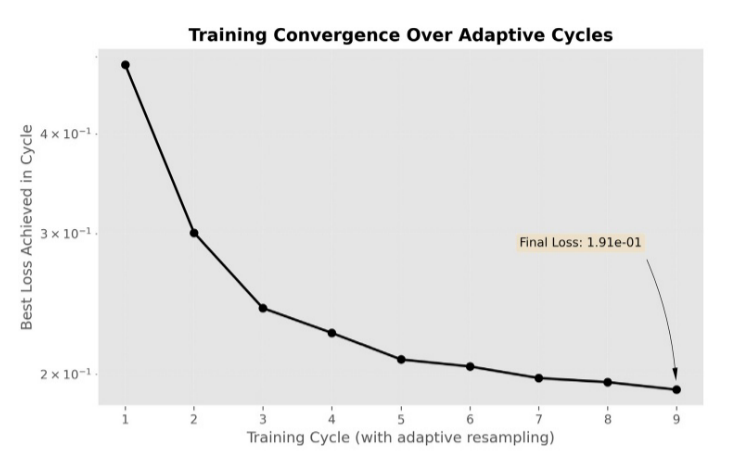
PINN的训练收敛性。该图显示了在8个自适应采样周期的每个周期结束时实现的最佳总损失,其中每个周期由1000个训练epoch组成,随后是一个基于残差的重采样步骤,显示出稳定的单调下降。
结果分析
本研究引入了一种物理信息神经网络(PINN)工作流,用于直接从水文地球物理观测推断根系吸水(RWU)的时空动态。使用一个合成的但现实的验证工作流程,我们证明了将理查兹方程与地电层析成像和稀疏的原位测量相结合,可以实现超越传统逆建模的解决方案,而传统逆建模预设了RWU的特定功能形式。该工作流使用双输出PINN来重建高分辨率饱和场,在不规定其数学结构的情况下学习未知的RWU汇项。
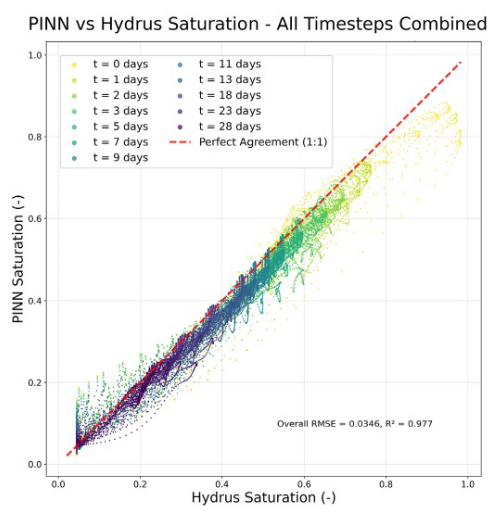
在28天的干燥期内,与用于训练的平滑ERT输入相比,反向PINN始终产生更接近HYDRUS地面真实情况的饱和场。在所有时间步长和空间位置上,重建的总体RMSE为~ 0.035,R2≈0.98,同时也减少了ert衍生场中明显的强烈早期负偏差。这些收益来自于将理查兹方程作为基于物理的正则化器:网络拒绝了由平滑约束ERT反演引入的非物理伪像,并收敛到水文一致状态。一个中心结果是从不完美的观测中恢复RWU汇项。即使事先不知道feddes型行为,无约束PINN也能再现RWU的空间分布和大小,其余误差主要集中在厌氧阈值附近的非常潮湿的条件下。引入单个标量约束-每日总蒸腾-大大加强了推理。在R³(≥,≥,T)的空间积分与已知蒸腾量之间强制执行一致性,将日蒸腾RMSE降低了约88%,并将大部分域的局部Rerrors降低到5%以下。这实际上是有吸引力的,因为基于茎的汁液流或树木测量可以在现场设置中提供所需的积分约束。
除了现场重建外,PINN还恢复了HYDRUS模型所隐含的功能RWU-moisture关系。将Feddes曲线拟合到PINN的预测(n²,Rn²)对中,相对于真实值,在头部空间中产生了~ 12%的偏差,但在相应的有效饱和度中误差要小得多(~ 2%)。在非常高的饱和度下,剩余的不匹配与SE≳0.9以上缺乏ERT支持是一致的,在那里层析平滑会使近地表水分估计产生偏差。未来的研究可能会通过在灌溉区附近安装含水量传感器来改善高饱和度推断,这将在ERT层析成像最不可靠的湿度范围内提供直接测量。