在暂停数年后,OpenAI 正将研究与招聘资源重新投向"具身智能",并把焦点进一步推向人形系统。多份权威报道、公开招聘信息与产业动向交叉印证:这家以大模型闻名的公司,正在搭建一个面向现实世界的机器人研发矩阵。WIRED 9 月 15 日的报道,OpenAI 近来密集招募具有人形机器人与物理控制算法背景的科研人才,并在训练路径上强调遥操作(teleoperation)与仿真(包括 Nvidia Isaac 等工具);公司是否自建硬件或与外部制造商合作仍未明朗,但"人形形态"的研究正在加速推进。这种动向在招聘信息上有"硬证据"。例如,Mechanical Product Engineer, Robotics 的岗位要求明确写到团队"专注于解锁通用机器人",并强调传感器、执行器、计算元件集成与面向真实约束的形态探索;更醒目的,是其偏向量产的字样:"有为高产量(1M+)设计机械系统的经验"。这意味着 OpenAI 至少在可规模化的方向上进行前置设计与评估。此外,Simulation Environments Engineer, Robotics 的岗位直接点名遥操作/硬件在环(HIL)与Nvidia Isaac 等仿真生态,强调将大规模强化学习与GPU 管线优化落地到机器人任务场景。这与 WIRED 的技术路径描述一致,构成相互印证。早在 2024 年 11 月,前 Meta AR 眼镜硬件负责人 Caitlin Kalinowski 加入 OpenAI,负责机器人与消费硬件方向。此举被多家媒体视为 OpenAI 重返机器人赛道的强烈信号,也提示其机器人战略并非"只做算法"。OpenAI 早年在机器人研究上曾颇有建树。2019 年,"Dactyl"五指机械手单手复原魔方,展示了仿真到现实(sim2real)的里程碑式成果(ADR 自动域随机化等方法)。不过在随后的资源权衡中,OpenAI 在 2021 年关闭机器人团队,将重心转向能更快取得可见进展的通用模型与产品。如今"回归",是其技术路线回到与物理世界更深层耦合的必经之路。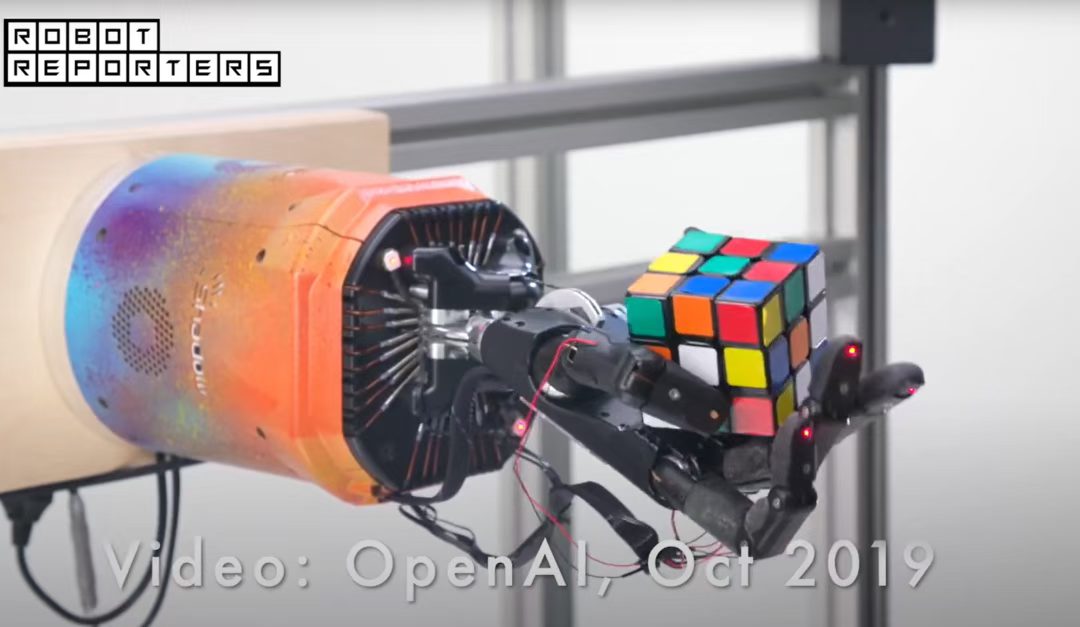
从岗位与报道的交叉信息看,OpenAI 的核心假设是:把通用模型的"理解与推理"延伸到"感知---控制"的完整闭环。这需要三类能力:1.数据采集与评测:通过遥操作与大规模仿真收集多样交互数据,构建更强的动作生成/控制策略;相应地,OpenAI 设有DAQ/数据采集软件工程岗位以扩展数据采集与评测体系。2.模型与算力栈:在大规模强化学习、分布式训练与实时推理上,承接 Isaac 等仿真环境与现实平台,优化感知-控制的时序与稳定性。3.形态与产线设计:通过传感/执行器/散热/材料等硬件工程,探索"可被现实约束验证"的形态;"1M+ 量级"的可制造性要求,释放了对规模化落地的前瞻信号。换言之,OpenAI 想把"会说话的模型"升级为"会操作世界的系统",并让两者在统一的评测、数据与训练循环中相互促动。这与多位学者的观点一致:要突破大模型在高维感知与高频控制方面的瓶颈,AI 必须真正进入物理世界。人形机器人并非 OpenAI 一家的竞赛。特斯拉、谷歌、Agility 等均在推进原型验证与小规模商用;WIRED 统计称自 2024 年以来,流入人形赛道的资本超过 50 亿美元,且机构对 2050 年万亿美元级市场的展望不断强化。对 OpenAI 而言,这既是技术方向的必答题,也是资本市场与合作伙伴看重的叙事。同时,OpenAI 过去两年围绕算力、资金与治理的诸多调整(包括与微软的协议重构、基础设施多元化等),也将反向影响其机器人推进节奏与外部合作形态。就近几日的公开报道,OpenAI 与微软签署新的非约束性备忘,为组织与资本框架的后续调整留出空间。事实层面可以确认的是:OpenAI 正在重建并扩编机器人团队、面向人形系统招募关键岗位、采用遥操作与仿真驱动的数据与训练闭环;其是否自建整机、量产节奏与场景优先级仍未公开坐实。