一、时钟(clock)
<1>. 硬件概念:
- 时钟概念:在电子系统中是一个产生稳定、周期性振荡信号的电路或组件。这个信号像节拍器或心跳一样,为数字电路中的各种操作提供同步时序基准。
- 实时时钟(RTC real time clock): 是微处理器中的一个功能模块,用于在系统主电源关闭的情况下,继续提供精确的日历和时间信息。
- 时钟源:晶体振荡器(工作原理:将石英晶体切割成音叉,施加电压,会产生稳定的震荡)
- 外设工作频率分配:外部时钟源构建的时钟树通过物理线路供应给外设需要的工作频率,其中也包括供应kernal的工作频率(396M,最大1.3G)
PPL(Phase-Locked Loop):锁相环电路,可以倍频输出
【IMX6ULL中共有7个PLL】
- 允许输入一个固定频率,输出固定频率*n(n 倍频系数)
Prescal:预分频器,可以分频
PFD(Phase Fractional Divier):相位分数分频器,输出频率可升可降
【IMX6ULL中共有8个PFD(PLL2和PLL3各四个) 】

<2>. 代码编写
-
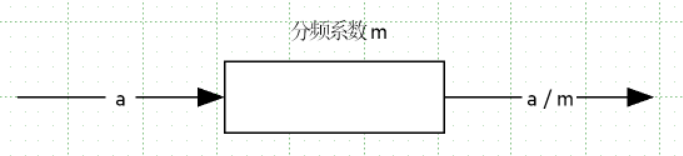
kernal: CCM_ANALOG_PLL_ARMn
PLL的配置流程
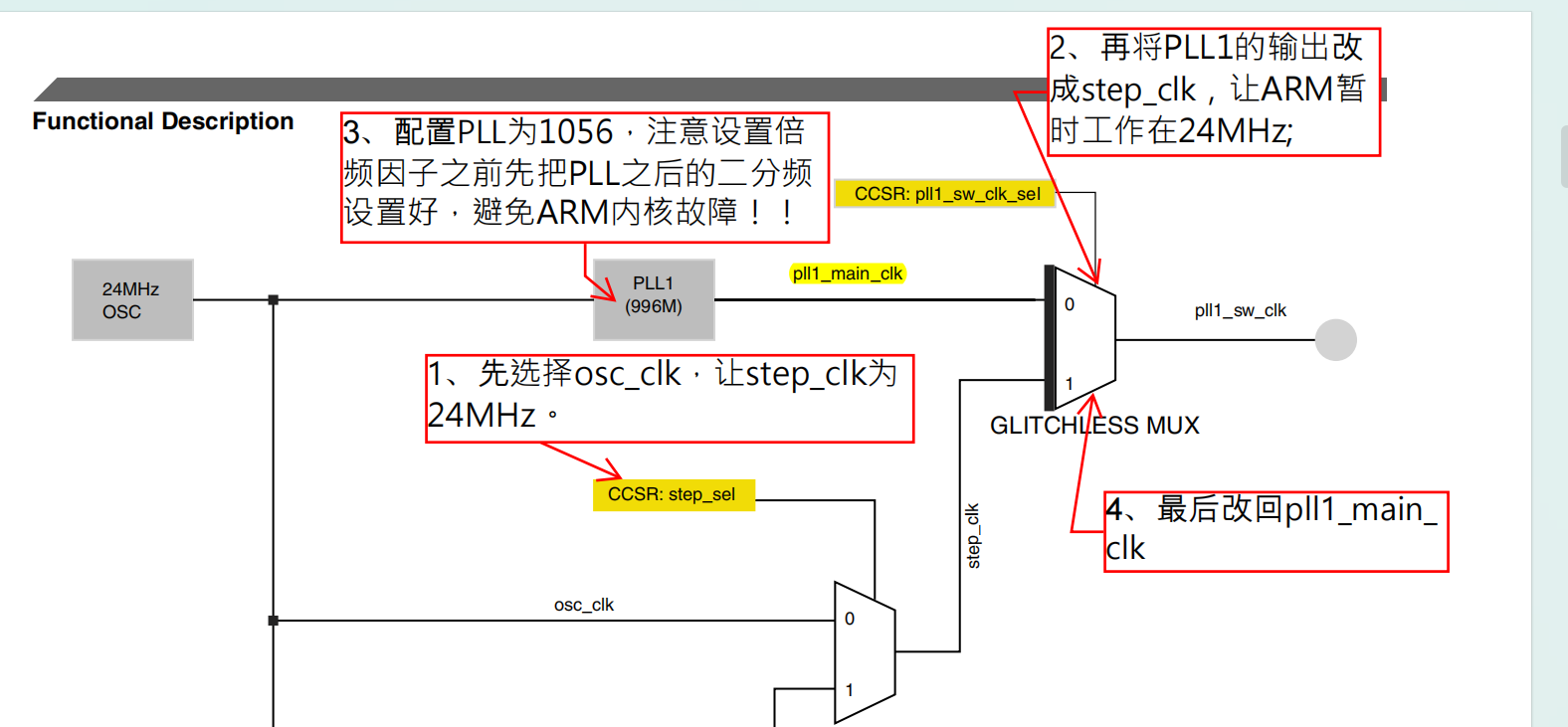
-
528 PLL:CCM_ANALOG_PFD_528n
-
480 PLL:CCM_ANALOG_PFD_480n
2和三根据参考手册配置将位置1或置0
-
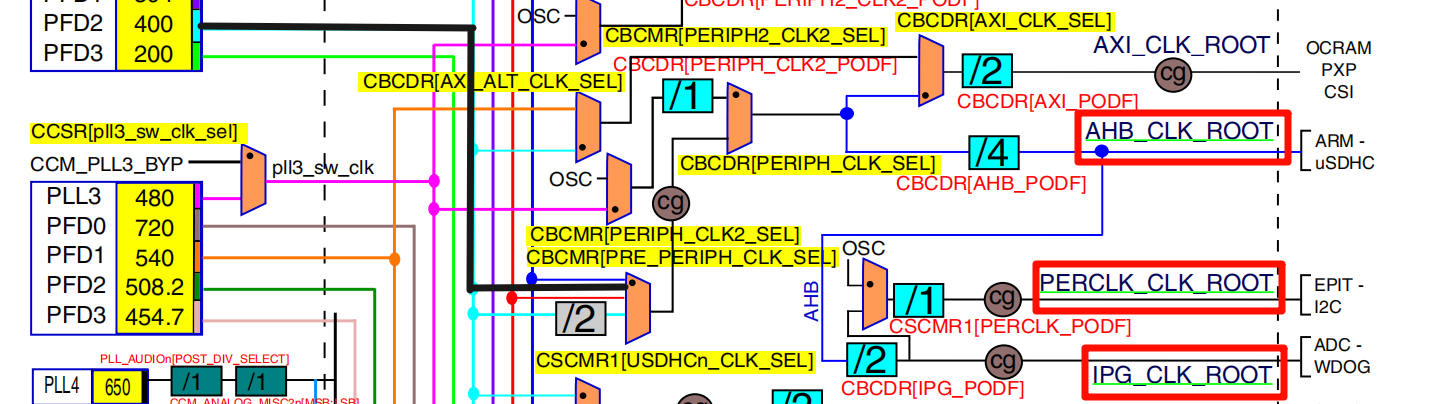
AHB_CLK_ROOT(最高频率132M):Advanced High-performance Bus(高级高性能总线),用于驱动高速外设
- CBCMRPRE_PERIPH_CLK_SEL
- CBCDRPERIPH_CLK_SEL
- CBCDRAHB_PODF
- IPG_CLK_ROOT(最高频率66M):Internal Peripheral Bus Clock(内部外设总线时钟),用于驱动低速外设
- CBCDRIPG_PODF
- PERCLK_CLK_ROOT(最高频率66M):
- CSCMR1PERCLK_CLK_SEL
- CSCMR1PERCLK_PODF
二、定时器
<1>
EPIT(Enhanced Periodic Interrupt Timer):增强型周期中断定时器EPIT定时器的两种工作模式:
- set-and-forget 模式:在此模式下 EPIT 的计数器从加载寄存器 (EPITx_LR) 中获取初始值,不能直接向计数器寄存器写入数据。不管什么时候,只要计数器计数到 0,那么就会从加载寄存器 EPITx_LR 中重新加载数据到计数器中,周而复始。
- free-running 模式 :在此模式下,当计数器计数到 0 以后会重新从0XFFFFFFFF 开始计数,并
不是从加载寄存器 EPITx_LR 中获取数据
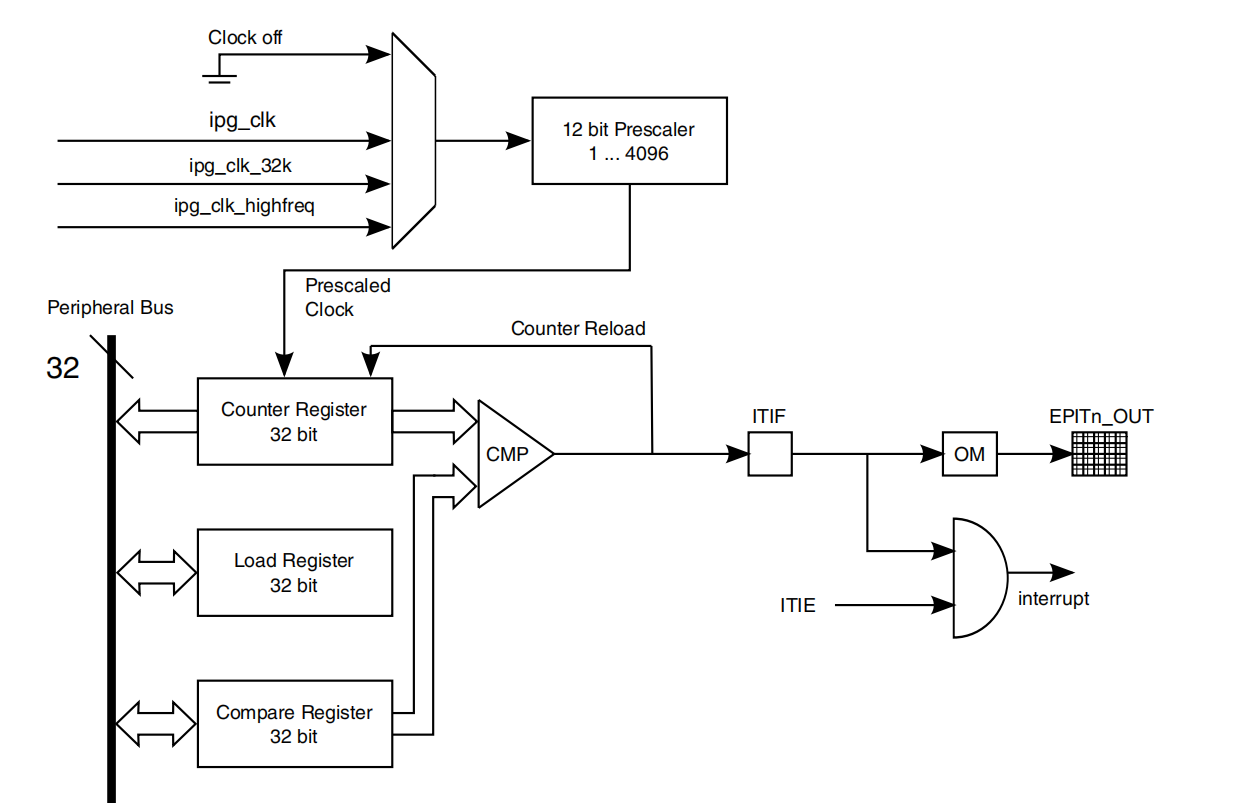
EPIT工作原理简述
- 通过多路选择器,从 三个时钟中选择一个作为输入时钟
【ipg_clk(内部外设总线时钟)、ipg_clk_32k(32kHz 低速时钟)、ipg_clk_highfreq(高频时钟)或 "Clock off"(时钟关闭)】 - 12 位预分频:对第一步选择的时钟进行"12 bit Prescaler"(12 位预分频器),可设置分频系数 (1~4096)对时钟进一步分频,得到 "Prescaled Clock"(预分频后时钟),用于驱动计数器。
- 计数器与寄存器协作:
- 计数器寄存器(Counter Register):32 位宽,在预分频时钟驱动下递减计数。
- 加载寄存器(Load Register):32 位宽,存储计数器的初始值(或重载值)。当计数器减到特定值(如与比较寄存器匹配,或减到 0)时,会从加载寄存器重新加载数值,实现周期性计数。
【实现通过将EPIT_CR(contral register)寄存器设置为:设置并忘记模式】 - 比较寄存器(Compare Register):32 位宽,与存储的预设的 "目标值"进行比较。
- 比较与中断 / 输出触发比较器(CMP):将计数器当前值与比较寄存器的值对比。当两者匹配时,会触发:
- 输出触发(ITIF):可通过输出模式(OM)模块(OM模块会使输出信号翻转),生成 EPITn_OUT 输出信号(用于外设控制等场景)。
- 中断触发:若中断使能位(ITIE)开启,会产生中断请求,用于通知 CPU 执行定时任务(如 LED 闪烁、数据采样等)。
<2>
GPT(General Purpose Timer):通用目的定时器
- GPT 定时器(高精度定时器)是一个32 位向上定时器(也就是从0X00000000 开始向上递增计数)
- GPT 定时器特性如下 :
① 一个可选时钟源的 32 位向上计数器;
② 两个输入捕获通道,可以设置触发方式;
③ 三个输出比较通道,可以设置输出模式;
④ 可以生成捕获中断、比较中断和溢出中断;
⑤ 计数器可以运行在重新启动(restart)或(自由运行)free-run 模式。
GPT的两种工作模式:- 重新启动(restart)模式:在此模式下,当计数值和比较寄存器中的值相等的话计数值就会清零,然后重新从0X00000000 开始向上计数,只有比较通道 1 才有此模式!向比较通道 1 的比较寄存器写入任何数据都会复位 GPT 计数器。对于其他两路比较通道(通道 2 和 3),当发生比较事件以后不会复位计数器。
- 自由运行(free-run)模式 :当在此模式下,此模式适用于所有三个比较通道,当比较事件发生以后并不会复位计数器,而是继续计数,直到计数值为 0XFFFFFFFF,然后重新回滚到 0X00000000。
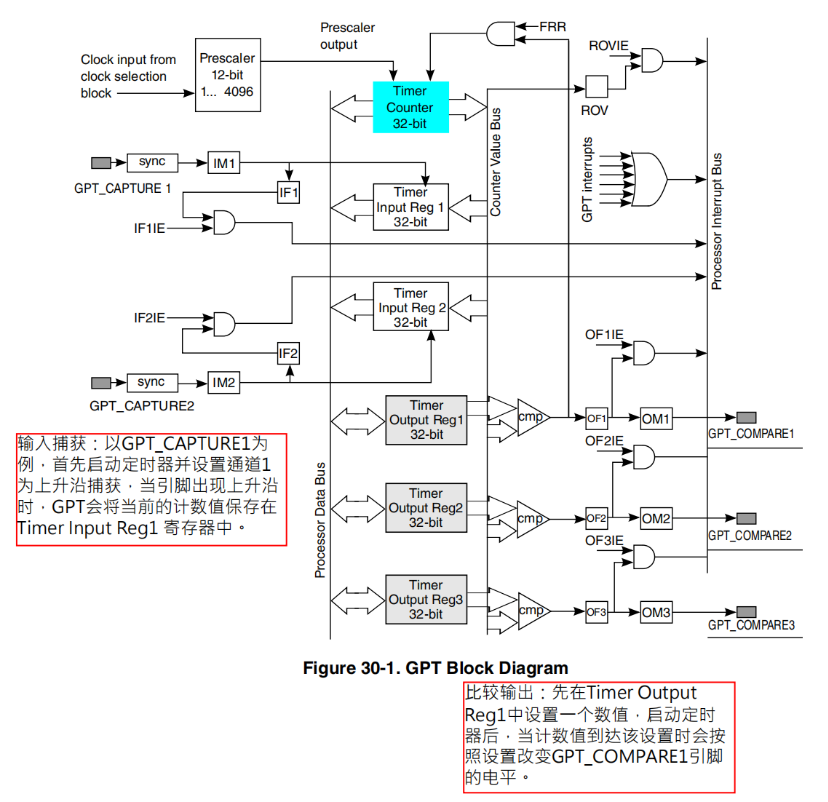
GPT工作原理简述