目录
[一、MOS 管驱动模块技术参数](#一、MOS 管驱动模块技术参数)
前言
最近在玩灯带,发现双mos并联的有源输出,内阻更低,电流更大,且能输出PWM和高电平,所以也在这里记录下
mos管经常被用作放大器、逆变器等等,这里用到的就是mos管的放大电路特性
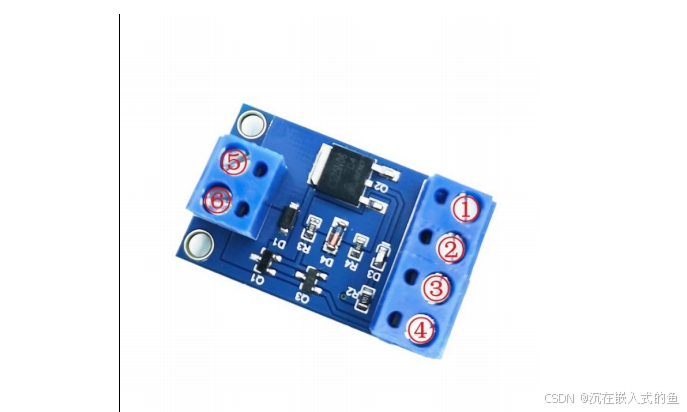
一、MOS****管驱动模块技术参数
|----|--------|--------|-----------------|
| 序号 | 引脚定义 | 功能描述 | 备注 |
| ① | DC+ | 供电电源正极 | 供电 5V~24V |
| ② | DC- | 供电电源负极 | |
| ③ | GND | 驱动负极 | 可接可不接 |
| ④ | IO/PWM | 驱动正极 | 高低电平信号或者 PWM 方波 |
| ⑤ | OUT- | 驱动输出负极 | |
| ⑥ | OUT+ | 驱动输出正极 | |
二、技术参数
1、供电电压 DC5V-24V;适合驱动 LED 光源、低压灯泡,小功率马达等...
(如供电电压 DC5V,输出就是额定 DC5V 的负载)
2、信号输入 DC3V、3.3V、5V、PWM 电平信号频率为 0-100KHz 内,或
DC0--5V 内高低电平控制开或关。
提示:输入正负信号线一定要固定好,防止接触不好损坏驱动
3、输出功率:1 路 4A 以内。
4、请按驱动板上字符接线,如电源正"+"极;负"-"极;接反会损坏驱
动。
三、接线方式
|---|--------|
| ① | 5V |
| ② | GND |
| ③ | GND |
| ④ | PIN_13 |
| ⑤ | 灯带正极 |
| ⑥ | 灯带负极 |
四、软件程序
main.c
#include "stm32f10x.h"
#include "delay.h"
/**************************************************************************************
* 描 述 : GPIO初始化配置
* 入 参 : 无
* 返回值 : 无
**************************************************************************************/
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* Enable the GPIO Clock */
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOC , ENABLE);
GPIO_DeInit(GPIOB); //将外设GPIOB寄存器重设为缺省值
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_ResetBits(GPIOC , GPIO_Pin_13); //初始状态,熄灭指示灯
}
void IO_control(void)
{
GPIO_SetBits(GPIOC , GPIO_Pin_13); //闭合
delay_ms(5000);
GPIO_ResetBits(GPIOC , GPIO_Pin_13); //关闭
delay_ms(5000);
}
/**************************************************************************************
* 描 述 : MAIN函数
* 入 参 : 无
* 返回值 : 无
**************************************************************************************/
int main(void)
{
SystemInit(); //设置系统时钟72MHZ
GPIO_Configuration(); //GPIO口初始化
while(1)
{
IO_control(); //IO控制
}
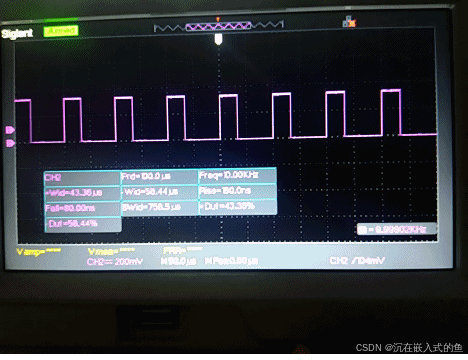
}五、实物演示效果
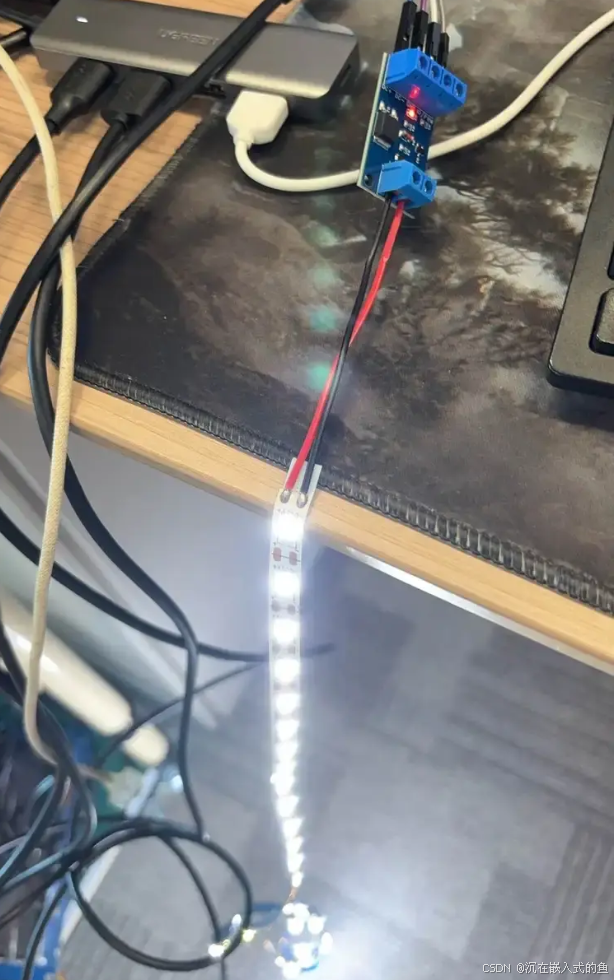
用示波器可以看到PIN13引脚确实在输出PWM正弦波,通过控制PWM的占空比可以达到调节灯光不同亮度的作用