在语言大模型的竞争日趋白热化之际,人工智能的下一个主战场已然清晰------物理世界。将AI的智慧注入到物理实体中,让机器人具备通用的、适应各种场景的能力,已成为全球科技巨头竞相追逐的"圣杯"。在这场竞赛中,谷歌DeepMind近期发布的Gemini Robotics 1.5系列,不仅展示了其在技术上的领先地位,更揭示了其试图主导整个机器人时代的宏大"阳谋"。
打造"机器人界的Android"
谷歌的战略并非是亲自下场,去设计和制造所有形态的机器人。恰恰相反,其核心商业逻辑是,提供一个极其强大的、标准化的AI"大脑"和"操作系统",让全球所有机器人制造商,无论是工业机械臂、仓储机器人还是人形机器人,都能够采购和集成。
这无疑是在复刻其在智能手机时代,通过Android系统建立平台级生态系统的成功路径。通过将最核心、最复杂的AI能力封装成一个易于调用的服务,谷歌旨在成为未来所有通用机器人背后的"赋能者",从而在即将到来的具身智能时代,占据产业链的顶端位置。
实现"通用"的技术基石
要实现这一宏伟目标,必须解决通用机器人发展道路上的两大核心技术难题:数据稀缺性 和实时性。
动作迁移技术
具身智能领域最大的发展瓶颈,在于机器人训练数据的稀缺。收集真实机器人的物理交互数据,成本高昂且极其耗时,而且不同型号机器人的数据通常互不通用。
Gemini Robotics 1.5模型中的动作迁移技术,正是为了攻克这一难题。它通过一种新的模型架构,让AI能够从多种不同形态的机器人(异构、多具身)的训练数据中,学习到关于运动和物理学的统一、通用的理解。
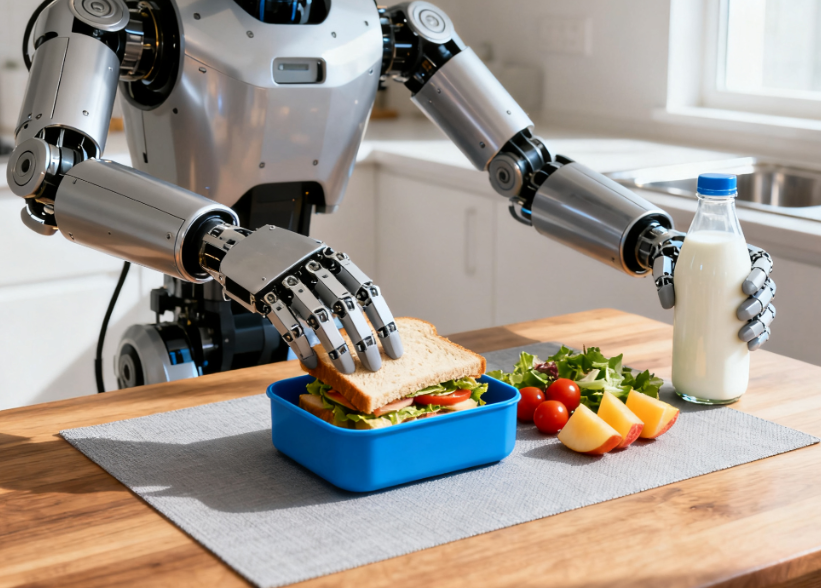
这带来的革命性突破,就是零样本技能迁移 。这意味着,在一个双臂机器人上训练的"打包午餐"技能,可以无需额外训练,直接在一个人形机器人上成功执行。机器人之间从此可以相互"学习"和共享经验,这极大地加速了通用技能的积累和泛化进程。
Gemini Robotics On-Device
另一个巨大挑战,是机器人在真实世界中对实时响应 和网络稳定性的严苛要求。传统的云端AI模型,推理延迟高,且高度依赖稳定的网络连接,这在许多工业、医疗或户外场景中是无法接受的。
为此,谷歌推出了紧凑型版本Gemini Robotics On-Device (GRoD) 。它采用了一种巧妙的混合架构:将复杂的感知和推理核心保留在云端,但将一个轻量级的动作解码器部署在机器人本地的芯片上运行。
通过"滚动预测范围"等技术,GRoD成功地将云端160毫秒的延迟,隐藏在一个50Hz的平滑控制循环背后,最终实现了约250毫秒 的低延迟闭环控制。更重要的是,它具备离线弹性,即使在网络完全中断的情况下,本地的解码器依然能够继续执行任务。这使得机器人在仓库、外科手术室或远程勘探等网络不稳定的环境中,也能保持稳定工作。
通用机器人离我们还有多远
那么,有了这些技术突破,一个能走进我们生活和工作的通用机器人,离我们还有多远?
从已实现的场景来看,我们已经非常接近。在演示中,搭载了Gemini Robotics 1.5的机器人,已经能够执行相当复杂的、需要情境感知的任务。例如,它能根据"请帮我打包一份午餐,但别压坏了葡萄"这样的自然语言指令,执行精细的操作;也能在打包行李时,通过调用Google Search 查询目的地的天气,从而主动将一把雨伞放入行李箱。
当然,要实现大规模普及,通用机器人仍面临诸多挑战。包括如何进一步提升在复杂动态环境中的灵巧度和安全性,以及如何处理长时序的、更复杂的任务规划等。谷歌发布的ASIMOV-2.0安全基准测试,也正是为了系统性地评估和解决机器人在真实世界中的安全伦理问题。
谷歌DeepMind通过Gemini Robotics 1.5系列,不仅展示了其在具身智能技术上的绝对领先地位,更重要的是,其"机器人界Android"的平台化开放战略,可能会极大地加速整个通用机器人产业的成熟与到来。一个由AI驱动、能够真正理解并服务于我们物理世界的机器人新纪元,其大幕已经拉开。