文章目录
- 1.新的看图软件
-
- [1.1 深度图滤波设置](#1.1 深度图滤波设置)
- 2.属性配置
-
- 2.1如何查看SDK版本?
- [2.2 SDK中区分新旧相机接口](#2.2 SDK中区分新旧相机接口)
- 3.适配所有相机参考例子
- 4.新(`4.X.X`)旧(`3.X.X`)SDK主要区别
-
- [4.1 `3.X.X`版本SDK基本概念](#4.1
3.X.X版本SDK基本概念) -
- [4.1.1 SDK3.0接口介绍(TYParameter.h)](#4.1.1 SDK3.0接口介绍(TYParameter.h))
-
- [4.1.1.1 System](#4.1.1.1 System)
- [4.1.1.2 Interface](#4.1.1.2 Interface)
- [4.1.1.3 Device](#4.1.1.3 Device)
- [4.1.1.4 Component](#4.1.1.4 Component)
- [4.1.1.5 Feature](#4.1.1.5 Feature)
- [4.1.1.6 FrameData](#4.1.1.6 FrameData)
- [4.2 `4.X.X`版本SDK基本概念](#4.2
4.X.X版本SDK基本概念) -
- [4.2.1 SDK4.0接口介绍(TYParameter.h)](#4.2.1 SDK4.0接口介绍(TYParameter.h))
-
- [4.2.1.1 Common](#4.2.1.1 Common)
- [4.2.1.2 Command](#4.2.1.2 Command)
- [4.2.1.3 Interger](#4.2.1.3 Interger)
- [4.2.1.4 Float](#4.2.1.4 Float)
- [4.2.1.5 Boolean](#4.2.1.5 Boolean)
- [4.2.1.6 Enumeration](#4.2.1.6 Enumeration)
- [4.2.1.7 String](#4.2.1.7 String)
- [4.2.1.8 ByteArray](#4.2.1.8 ByteArray)
- [4.2.2 SDK4.0新增功能点介绍](#4.2.2 SDK4.0新增功能点介绍)
- [4.3 SDK4.0和SDK3.0功能点对比](#4.3 SDK4.0和SDK3.0功能点对比)
- [4.1 `3.X.X`版本SDK基本概念](#4.1
- 5.常见问题FAQ
-
- [5.1 黑灯工厂下,单纯依靠相机自带的参曝光、增益,无法拿到可用的RGB图,该怎么解决?](#5.1 黑灯工厂下,单纯依靠相机自带的参曝光、增益,无法拿到可用的RGB图,该怎么解决?)
-
- [5.1.1 针对无泛光的散斑相机,客户无法加补光灯](#5.1.1 针对无泛光的散斑相机,客户无法加补光灯)
- [5.1.2 针对无泛光的散斑相机,客户增加补光灯](#5.1.2 针对无泛光的散斑相机,客户增加补光灯)
- [5.1.3 .针对有泛光的散斑相机,可开启泛光](#5.1.3 .针对有泛光的散斑相机,可开启泛光)
- [5.1.4 TOF相机,使用相机IR图](#5.1.4 TOF相机,使用相机IR图)
- [5.2 TOF相机IR图增强方式](#5.2 TOF相机IR图增强方式)
-
- [5.2.1 IR图线性拉伸](#5.2.1 IR图线性拉伸)
- [5.2.2 扩展比例对图像的像素值进行线性变换](#5.2.2 扩展比例对图像的像素值进行线性变换)
- [5.2.3 基于标准差的线性拉伸](#5.2.3 基于标准差的线性拉伸)
- [5.2.4 基于对数变换的非线性拉伸](#5.2.4 基于对数变换的非线性拉伸)
- [5.2.5 基于直方图的非线性拉伸](#5.2.5 基于直方图的非线性拉伸)
- [5.2.6 Gamma校正](#5.2.6 Gamma校正)
- 6.补充学习资料
-
- [6.1 Low-level视觉之弱光图像增强及常规图像增强](#6.1 Low-level视觉之弱光图像增强及常规图像增强)
- [6.2 Genicam SFNC协议](#6.2 Genicam SFNC协议)
主要梳理了图漾官网C++语言 4.X.X版本的例子
1.新的看图软件
目前官网上并未发布新的看图软件,如在使用图漾GM461/465 和PMD002/003 等新相机时,建议联系图漾技术,获取新版本看图软件(也是兼容旧相机的),而其他型号的相机,仍建议使用官网的PercipioViewer软件:

而新的看图软件界面,如下图所示:
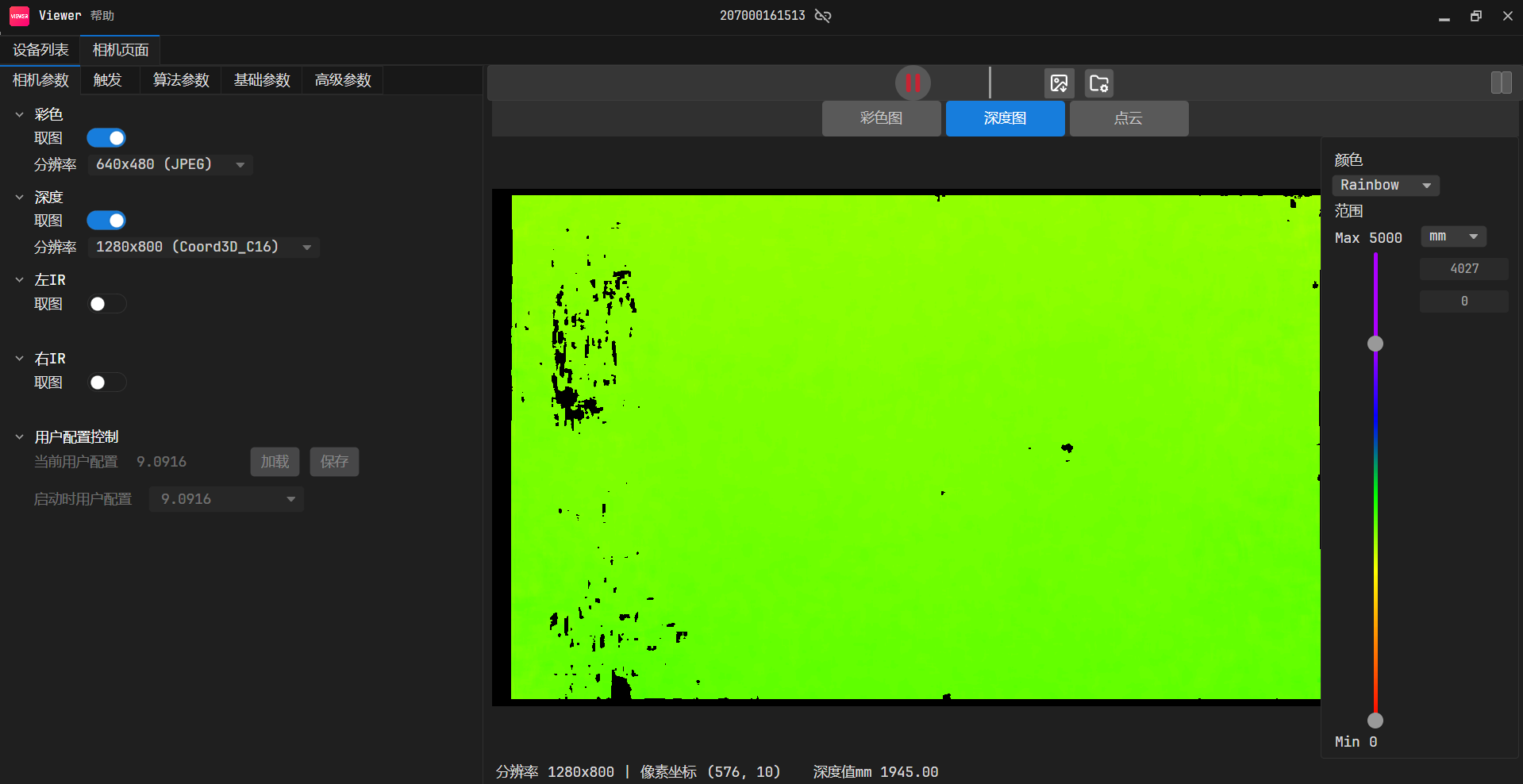
注意:新看图软件,当前仅支持Windows10/11 64位系统。
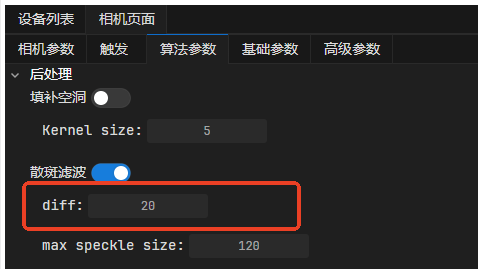
1.1 深度图滤波设置
建议再开启相机取流前,打开散斑滤波设置开关
2.属性配置
具体的属性设置可参看如下链接:
2.1如何查看SDK版本?
查看相机SDK版本方式1,进入到SDK版本以下路径,如下图:

2.2 SDK中区分新旧相机接口
cpp
if (TYIsNetworkInterface(selectedDev.iface.type))
{
LOGD(" - device %s:", selectedDev.id);
if (strlen(selectedDev.userDefinedName) != 0)
{
LOGD(" vendor : %s", selectedDev.userDefinedName);
} else {
LOGD(" vendor : %s", selectedDev.vendorName);
}
LOGD(" model : %s", selectedDev.modelName);
LOGD(" device MAC : %s", selectedDev.netInfo.mac);
LOGD(" device IP : %s", selectedDev.netInfo.ip);
LOGD(" TL version : %s", selectedDev.netInfo.tlversion);
if (strcmp(selectedDev.netInfo.tlversion, "Gige_2_1") == 0)
{
use_new_apis();
}
else
{
use_old_apis();
}
}
else
{
TY_DEV_HANDLE handle;
int32_t ret = TYOpenDevice(hIface, selectedDev.id, &handle);
if (ret == 0)
{
TYGetDeviceInfo(handle, &selectedDev);
TYCloseDevice(handle);
LOGD(" - device %s:", selectedDev.id);
}
else
{
LOGD(" - device %s(open failed, error: %d)", selectedDev.id, ret);
}
if (strlen(selectedDev.userDefinedName) != 0) {
LOGD(" vendor : %s", selectedDev.userDefinedName);
}
else
{
LOGD(" vendor : %s", selectedDev.vendorName);
}
LOGD(" model : %s", selectedDev.modelName);
use_old_apis();
}3.适配所有相机参考例子
既可以适用之前的FM851-E2/FM855等相机,也可以正常打开图漾新的GM46X、PMD等新相机
相机的规格书可查看如下链接:
具体代码如下:
cpp
#include <limits>
#include <cassert>
#include <cmath>
#include "../common/common.hpp"
#include <TYImageProc.h>
#include <chrono>
//深度图对齐到彩色图开关,置1则将深度图对齐到彩色图坐标系,置0则不对齐
//因彩色图对齐到深度图时会有部分深度缺失的区域丢失彩色信息,因此默认使用深度图对齐到彩色图方式
#define MAP_DEPTH_TO_COLOR 0
//开启以下深度图渲染显示将会降低帧率
DepthViewer depthViewer0("OrgDepth");//用于显示渲染后的原深度图
DepthViewer depthViewer1("FillHoleDepth");//用于显示渲染后的填洞处理之后的深度图
DepthViewer depthViewer2("SpeckleFilterDepth"); //用于显示渲染后的经星噪滤波过的深度图
DepthViewer depthViewer3("EnhenceFilterDepth"); //用于显示渲染后的经时域滤波过的深度图
DepthViewer depthViewer4("MappedDepth"); //用于显示渲染后的对齐到彩色图坐标系的深度图
//事件回调
void eventCallback(TY_EVENT_INFO *event_info, void *userdata)
{
if (event_info->eventId == TY_EVENT_DEVICE_OFFLINE)
{
LOGD("=== Event Callback: Device Offline!");
// Note:
// Please set TY_BOOL_KEEP_ALIVE_ON OFF feature to false if you need to debug with breakpoint!
}
else if (event_info->eventId == TY_EVENT_LICENSE_ERROR)
{
LOGD("=== Event Callback: License Error!");
}
}
//数据格式转换
//cv pixel format to TY_PIXEL_FORMAT
static int cvpf2typf(int cvpf)
{
switch(cvpf)
{
case CV_8U: return TY_PIXEL_FORMAT_MONO;
case CV_8UC3: return TY_PIXEL_FORMAT_RGB;
case CV_16UC1: return TY_PIXEL_FORMAT_DEPTH16;
default: return TY_PIXEL_FORMAT_UNDEFINED;
}
}
//数据格式转换
//mat to TY_IMAGE_DATA
static void mat2TY_IMAGE_DATA(int comp, const cv::Mat& mat, TY_IMAGE_DATA& data)
{
data.status = 0;
data.componentID = comp;
data.size = mat.total() * mat.elemSize();
data.buffer = mat.data;
data.width = mat.cols;
data.height = mat.rows;
data.pixelFormat = cvpf2typf(mat.type());
}
// save XYZ format pointcloud
static void writePointCloud_XYZ(const cv::Vec3s* pnts, size_t n, const char* file)
{
FILE* fp = fopen(file, "w");
if (!fp)
{
return;
}
for (size_t i = 0; i < 6000; i++)
{
if (pnts[i][2] < 6000)
{
fprintf(fp, "%hd %hd %hd\n", pnts[i][0], pnts[i][1], pnts[i][2]);
}
}
fclose(fp);
}
//回调数据
struct CallbackData
{
int index;
TY_DEV_HANDLE hDevice;
TY_CAMERA_INTRINSIC* intri_depth;
TY_CAMERA_INTRINSIC* intri_color;
TY_CAMERA_CALIB_INFO depth_calib;
TY_CAMERA_CALIB_INFO color_calib;
float scale_unit;
bool saveOneFramePoint3d;
int fileIndex;
bool isTof;
};
CallbackData cb_data;
//通过内参实训深度图转点云,方式供参考
//depth to pointcloud
//对齐后输入的是RGB的内参,depth是对齐后的depth
cv::Mat depthToWorld(float* intr, const cv::Mat &depth)
{
cv::Mat world(depth.rows, depth.cols, CV_32FC3);
float cx = intr[2];
float cy = intr[5];
float inv_fx = 1.0f / intr[0];
float inv_fy = 1.0f / intr[4];
for (int r = 0; r < depth.rows; r++)
{
uint16_t* pSrc = (uint16_t*)depth.data + r * depth.cols;
cv::Vec3f* pDst = (cv::Vec3f*)world.data + r * depth.cols;
for (int c = 0; c < depth.cols; c++)
{
uint16_t z = pSrc[c];
if(z == 0){
pDst[c][0] = NAN;
pDst[c][1] = NAN;
pDst[c][2] = NAN;
} else {
pDst[c][0] = (c - cx) * z * inv_fx;
pDst[c][1] = (r - cy) * z * inv_fy;
pDst[c][2] = z;
}
}
}
return world;
}
//输出畸变校正的彩色图,并实现深度图对齐到彩色图
static void doRegister(const TY_CAMERA_CALIB_INFO& depth_calib
, const TY_CAMERA_CALIB_INFO& color_calib
, const cv::Mat& depth
, const float f_scale_unit
, const cv::Mat& color
, cv::Mat& undistort_color
, cv::Mat& out
, bool map_depth_to_color
)
{
// do undistortion
TY_IMAGE_DATA src;
src.width = color.cols;
src.height = color.rows;
src.size = color.size().area() * 3;
src.pixelFormat = TY_PIXEL_FORMAT_RGB;
src.buffer = color.data;
undistort_color = cv::Mat(color.size(), CV_8UC3);
TY_IMAGE_DATA dst;
dst.width = color.cols;
dst.height = color.rows;
dst.size = undistort_color.size().area() * 3;
dst.buffer = undistort_color.data;
dst.pixelFormat = TY_PIXEL_FORMAT_RGB;
ASSERT_OK(TYUndistortImage(&color_calib, &src, NULL, &dst));
// do register
if (map_depth_to_color)
{
out = cv::Mat::zeros(undistort_color.size(), CV_16U);
ASSERT_OK(
TYMapDepthImageToColorCoordinate
(
&depth_calib,
depth.cols, depth.rows, depth.ptr<uint16_t>(),
&color_calib,
out.cols, out.rows, out.ptr<uint16_t>(), f_scale_unit)
);
}
else
{
out = depth;
}
}
//帧处理
void frameHandler(TY_FRAME_DATA* frame, void* userdata)
{
CallbackData* pData = (CallbackData*) userdata;
LOGD("=== Get frame %d", ++pData->index);
std::vector<TY_VECT_3F> P3dtoColor, P3d;//对齐到color的点云
cv::Mat depth, color, ir,p3d, newP3d;
std::vector<cv::Mat> depths;
auto StartParseFrame = std::chrono::steady_clock::now();
//解析帧
parseFrame(*frame, &depth, &ir, 0, &color);//拿深度图和color图
auto ParseFrameFinished = std::chrono::steady_clock::now(); //计算程序耗时
auto duration2 = std::chrono::duration_cast<std::chrono::microseconds>(ParseFrameFinished - StartParseFrame);
LOGI("*******ParseFrame spend Time : %lld", duration2);
//填洞开关,开启后会降低帧率
bool FillHole = 0;
//星噪滤波开关,深度图中离散点降噪处理
bool SpeckleFilter = 0;
//时域滤波
bool EnhenceFilter = 1;
//参与时域滤波的图像数量
int depthnum = 1;
//IR图线性拉伸 //result=(grayIr-min(grayIr))* 255.0 / (max(grayIr) - min(grayIr))
bool IR_LinearStretch = 0;
//IR图通过扩展比例对图像的像素值进行线性变换 // result=src*multi_expandratio
bool IR_LinearStretchMulti = 0;
//IR图基于标准差的线性拉伸 // result=grayIr*255.0/(std_expandratio*std(grayIr));
bool IR_LinearStretchStd = 0;
//IR图基于对数变换的非线性拉伸 //result = log_expandratio * log2(src)
bool IR_NoLinearStretchLog2 = 0;
//IR图基于直方图的非线性拉伸 // result=equalizeHist(src)
bool IR_NoLinearStretchHist = 1;
//深度图处理
if (!depth.empty())
{
if (pData->isTof)
{
TY_IMAGE_DATA src;
src.width = depth.cols;
src.height = depth.rows;
src.size = depth.size().area() * 2;
src.pixelFormat = TY_PIXEL_FORMAT_DEPTH16;
src.buffer = depth.data;
cv::Mat undistort_depth = cv::Mat(depth.size(), CV_16U);
TY_IMAGE_DATA dst;
dst.width = depth.cols;
dst.height = depth.rows;
dst.size = undistort_depth.size().area() * 2;
dst.buffer = undistort_depth.data;
dst.pixelFormat = TY_PIXEL_FORMAT_DEPTH16;
ASSERT_OK(TYUndistortImage(&pData->depth_calib, &src, NULL, &dst));
depth = undistort_depth.clone();
}
if (FillHole)
{
//深度图填洞处理
DepthInpainter inpainter;
inpainter._kernelSize = 10;
inpainter._maxInternalHoleToBeFilled = 1800;
inpainter._fillAll = false;
inpainter.inpaint(depth, depth, cv::Mat());
depthViewer1.show(depth);
}
if (EnhenceFilter)
{
depths.push_back(depth.clone());
LOGD("depths_size %d", depths.size());
if (depths.size() >= depthnum)
{
// filter
//LOGD("count %d ", ++cnt);
LOGD("depthnum count %d ", depthnum);
std::vector<TY_IMAGE_DATA> tyDepth(depthnum);
for (size_t i = 0; i < depthnum; i++)
{
mat2TY_IMAGE_DATA(TY_COMPONENT_DEPTH_CAM, depths[i], tyDepth[i]);
}
//使用时域滤波
TY_IMAGE_DATA tyFilteredDepth;
cv::Mat filteredDepth2(depth.size(), depth.type());
mat2TY_IMAGE_DATA(TY_COMPONENT_DEPTH_CAM, filteredDepth2, tyFilteredDepth);
struct DepthEnhenceParameters param = DepthEnhenceParameters_Initializer;
param.sigma_s = 0; //空间滤波系数
param.sigma_r = 0; //深度滤波系数
param.outlier_rate = 0; //以像素为单位的滤波窗口
param.outlier_win_sz = 0.f;//噪音过滤系数
TYDepthEnhenceFilter(&tyDepth[0], depthnum, NULL, &tyFilteredDepth, ¶m);
depths.clear();
//显示时域滤波后深度图渲染
depthViewer3.show(filteredDepth2);
}
}
else if (!FillHole&&!SpeckleFilter)
{
//显示原深度图渲染
depthViewer0.show(depth);
//原点云
p3d = depthToWorld(pData->intri_depth->data, depth);
}
}
//对TOF的IR图进行解析
if (!ir.empty())
{
//IR图畸变校正
TY_IMAGE_DATA src1;
src1.width = ir.cols;
src1.height = ir.rows;
src1.size = ir.size().area() * 2;
src1.pixelFormat = TY_PIXEL_FORMAT_MONO16;
src1.buffer = ir.data;
cv::Mat undistort_ir = cv::Mat(ir.size(), CV_16U);
TY_IMAGE_DATA dst1;
dst1.width = ir.cols;
dst1.height = ir.rows;
dst1.size = undistort_ir.size().area() * 2;
dst1.buffer = undistort_ir.data;
dst1.pixelFormat = TY_PIXEL_FORMAT_MONO16;
ASSERT_OK(TYUndistortImage(&pData->depth_calib, &src1, NULL, &dst1));
ir = undistort_ir.clone();
cv::Mat meanvalue, stdvalue;
cv::Mat result;
double minVal, maxVal;
//IR图线性拉伸
if (IR_LinearStretch)
{
cv::Mat meanvalue, stdvalue;
cv::meanStdDev(ir, meanvalue, stdvalue);
//线性拉伸一般使用默认值
double std_expandratio = 6;
double use_norm_std = stdvalue.ptr<double>(0)[0];
double use_norm = use_norm_std * std_expandratio + 1.0;
cv::minMaxLoc(ir, &minVal, &maxVal);
ir.convertTo(result, CV_8UC1, 255.0 / use_norm);
cv::imshow("IR_LinearStretch", result);
cv::imwrite("IR_LinearStretch.png", result);
}
//通过扩展比例对图像的像素值进行线性变换
if (IR_LinearStretchMulti)
{
//对应对应PercipioViewer软件中的digital gain,范围(2,20),默认值为8,数值越大,图像越亮。
double multi_expandratio = 8;
ir.convertTo(result, CV_8UC1, multi_expandratio / 255.0);
cv::imshow("IR_LinearStretchMulti", result);
cv::imwrite("IR_LinearStretchMulti.png", result);
}
//基于标准差的线性拉伸 //result=equalizeHist(src)
if (IR_LinearStretchStd)
{
//对应PercipioViewer软件中的std gain,范围(2,20),默认值为6,数值越小,图像越亮。
double std_expandratio = 2;
cv::meanStdDev(ir, meanvalue, stdvalue);
double use_norm_std = stdvalue.ptr<double>(0)[0];
double use_norm = use_norm_std * std_expandratio + 1.0;
double minVal, maxVal;
cv::minMaxLoc(ir, &minVal, &maxVal);
ir.convertTo(result, CV_8UC1, 255.0 / use_norm);
cv::imshow("IR_LinearStretchStd", result);
cv::imwrite("IR_LinearStretchStd.png", result);
}
//IR图基于对数变换的非线性拉伸 //result = log_expandratio * log2(src)
if (IR_NoLinearStretchLog2)
{
int rows = ir.rows;
int cols = ir.cols;
result = cv::Mat::zeros(rows, cols, CV_8UC1);
//对应PercipioViewer软件中的log gain,范围(5,50),默认值为20,数值越大,图像越亮。
double log_expandratio = 15;
for (int i = 0; i < rows; i++)
{
uint16_t* in = ir.ptr<uint16_t>(i);
uint8_t* out = result.ptr<uint8_t>(i);
for (int j = 0; j < cols; j++)
{
uint16_t inone = in[j];
int outone = log_expandratio * log2(inone);
outone = outone < 255 ? outone : 255;
out[j] = uint8_t(outone);
}
}
cv::imshow("IR_NoLinearStretchLog2", result);
cv::imwrite("IR_NoLinearStretchLog2.png", result);
}
//IR图基于直方图的非线性拉伸 // result=equalizeHist(src)
if (IR_NoLinearStretchHist)
{
cv::Mat ir8;
double minVal, maxVal;
cv::minMaxLoc(ir, &minVal, &maxVal);
// 线性拉伸到0-255范围
ir.convertTo(ir8, CV_8UC1, 255.0 / (maxVal - minVal), -minVal * 255.0 / (maxVal - minVal));
cv::equalizeHist(ir8, result);
cv::imshow("IR_NoLinearStretchHist", result);
cv::imwrite("IR_NoLinearStretchHist.png", result);
}
}
//彩色图处理
cv::Mat color_data_mat, p3dtocolorMat;
if (!color.empty())
{
//显示原彩色图
//imshow("orgColor", color);
cv::Mat undistort_color, MappedDepth;
if (MAP_DEPTH_TO_COLOR)
{
auto BeforedoRegister = std::chrono::steady_clock::now();
//彩色图去畸变,并将深度图对齐到彩色图坐标系
doRegister(pData->depth_calib, pData->color_calib, depth, pData->scale_unit, color, undistort_color, MappedDepth, MAP_DEPTH_TO_COLOR);
//数据格式转换
cv::cvtColor(undistort_color, color_data_mat, CV_BGR2RGB);
//生成对齐到彩色图坐标系的点云,两种方法
//方法一:生成点云放在TY_VECT_3F---P3dtoColor
P3dtoColor.resize(MappedDepth.size().area());
ASSERT_OK(TYMapDepthImageToPoint3d(&pData->color_calib, MappedDepth.cols, MappedDepth.rows
, (uint16_t*)MappedDepth.data, &P3dtoColor[0], pData->scale_unit));
//方法二:生成点云放在32FC3 Mat---p3dtocolorMat
//p3dtocolorMat = depthToWorld(pData->intri_color->data, MappedDepth, pData->scale_unit);
auto AfterdoRegister = std::chrono::steady_clock::now();
auto duration3 = std::chrono::duration_cast<std::chrono::microseconds>(AfterdoRegister - BeforedoRegister);
LOGI("*******do Rgb Undistortion--MapDepthToColor--P3D spend Time : %lld", duration3);
//显示畸变校正后的彩色图
imshow("undistort_color", undistort_color);
//显示对齐到彩色图坐标系的深度图
depthViewer4.show(MappedDepth);
}
else
{
//彩色图去畸变,不对齐的深度图
doRegister(pData->depth_calib, pData->color_calib, depth, pData->scale_unit, color, undistort_color, MappedDepth, MAP_DEPTH_TO_COLOR);
//显示畸变校正后的彩色图
imshow("undistort_color", undistort_color);
//方法一:生成点云放在TY_VECT_3F---P3dtoColor
P3d.resize(MappedDepth.size().area());
ASSERT_OK(TYMapDepthImageToPoint3d(&pData->depth_calib, MappedDepth.cols, MappedDepth.rows
, (uint16_t*)MappedDepth.data, &P3d[0], pData->scale_unit));
//方法二 pointcloud in CV_32FC3 format
//newP3d = depthToWorld(pData->intri_depth->data, depth, pData->scale_unit);
}
}
//保存点云
//save pointcloud
if (pData->saveOneFramePoint3d)
{
char file[32];
if (MAP_DEPTH_TO_COLOR)
{
LOGD("Save p3dtocolor now!!!");
//保存对齐到color坐标系XYZRGB格式彩色点云
sprintf(file, "pointsToColor-%d.xyz", pData->fileIndex++);
//方式一点云保存
writePointCloud((cv::Point3f*)&P3dtoColor[0], (const cv::Vec3b*)color_data_mat.data, P3dtoColor.size(), file, PC_FILE_FORMAT_XYZ);
//方式二点云保存
//writePointCloud((cv::Point3f*)p3dtocolorMat.data, (const cv::Vec3b*)color_data_mat.data, p3dtocolorMat.total(), file, PC_FILE_FORMAT_XYZ);
}
else
{
LOGD("Save point3d now!!!");
//保存XYZ格式点云
sprintf(file, "points-%d.xyz", pData->fileIndex++);
//方式一点云保存
writePointCloud((cv::Point3f*)&P3d[0], 0, P3d.size(), file, PC_FILE_FORMAT_XYZ);
//方式二点云保存
//writePointCloud((cv::Point3f*)newP3d.data, 0, newP3d.total(), file, PC_FILE_FORMAT_XYZ);
}
pData->saveOneFramePoint3d = false;
}
//归还Buffer队列
LOGD("=== Re-enqueue buffer(%p, %d)", frame->userBuffer, frame->bufferSize);
ASSERT_OK( TYEnqueueBuffer(pData->hDevice, frame->userBuffer, frame->bufferSize) );
}
int main(int argc, char* argv[])
{
std::string ID, IP;
TY_INTERFACE_HANDLE hIface = NULL;
TY_DEV_HANDLE hDevice = NULL;
TY_CAMERA_INTRINSIC intri_depth;
TY_CAMERA_INTRINSIC intri_color;
int32_t resend = 1;
bool isTof = 0;
for(int i = 1; i < argc; i++)
{
if(strcmp(argv[i], "-id") == 0)
{
ID = argv[++i];
} else if(strcmp(argv[i], "-ip") == 0)
{
IP = argv[++i];
} else if(strcmp(argv[i], "-h") == 0)
{
LOGI("Usage: SimpleView_Callback [-h] [-id <ID>]");
return 0;
}
}
LOGD("=== Init lib");
ASSERT_OK( TYInitLib() );
TY_VERSION_INFO ver;
ASSERT_OK( TYLibVersion(&ver) );
LOGD(" - lib version: %d.%d.%d", ver.major, ver.minor, ver.patch);
int fetch_timeout = 0;
std::vector<TY_DEVICE_BASE_INFO> selected;
//选择相机
ASSERT_OK( selectDevice(TY_INTERFACE_ALL, ID, IP, 1, selected) );
ASSERT(selected.size() > 0);
//默认加载第一个相机
TY_DEVICE_BASE_INFO& selectedDev = selected[0];
//打开接口和设备
ASSERT_OK( TYOpenInterface(selectedDev.iface.id, &hIface) );
ASSERT_OK( TYOpenDevice(hIface, selectedDev.id, &hDevice) );
//for debug
//TYSetBool(hDevice, TY_COMPONENT_DEVICE, TY_BOOL_KEEP_ALIVE_ONOFF, false);
//不同型号相机具备不同的参数属性,可以使用PercipioViewer看图软件确认相机支持的参数属性和参数取值范围
TY_STATUS status = TY_STATUS_OK;
//使能彩色相机
//try to enable color camera
LOGD("Has RGB camera, open RGB cam");
ASSERT_OK(TYEnableComponents(hDevice, TY_COMPONENT_RGB_CAM));
//设置彩色相机像素格式和分辨率
LOGD("=== Configure feature, set RGB resolution");
//方法一:直接设置像素格式和分辨率
//ASSERT_OK(TYSetEnum(hDevice, TY_COMPONENT_RGB_CAM, TY_ENUM_IMAGE_MODE, TY_IMAGE_MODE_YUYV_640x360));//yuyv支持1280x720,640x360
//方法二:通过枚举相机支持的图像模式,结合图像宽度选定分辨率,不关注像素格式
if (TY_COMPONENT_RGB_CAM)
{
std::vector<TY_ENUM_ENTRY> image_mode_list;
status = get_feature_enum_list(hDevice, TY_COMPONENT_RGB_CAM, TY_ENUM_IMAGE_MODE, image_mode_list);
for (int idx = 0; idx < image_mode_list.size(); idx++)
{
TY_ENUM_ENTRY& entry = image_mode_list[idx];
//选择其中一个分辨率
if (TYImageWidth(entry.value) == 640)
{
LOGD("Select RGB Image Mode: %s", entry.description);
int err = TYSetEnum(hDevice, TY_COMPONENT_RGB_CAM, TY_ENUM_IMAGE_MODE, entry.value);
ASSERT(err == TY_STATUS_OK || err == TY_STATUS_NOT_PERMITTED);
break;
}
}
}
//读取彩色相机标定数据
//TY_STRUCT_CAM_CALIB_DATA内参是相机最大分辨率的内参
//TY_STRUCT_CAM_INTRINSIC内参是相机当前分辨率的内参
LOGD("=== Get color intrinsic");
ASSERT_OK(TYGetStruct(hDevice, TY_COMPONENT_RGB_CAM, TY_STRUCT_CAM_INTRINSIC, &intri_color, sizeof(intri_color)));
LOGD("=== Read color calib data");
ASSERT_OK(TYGetStruct(hDevice, TY_COMPONENT_RGB_CAM, TY_STRUCT_CAM_CALIB_DATA
, &cb_data.color_calib, sizeof(cb_data.color_calib)));
//彩色相机硬ISP功能,仅RGB图像格式为YUYV是支持硬ISP的。
//3A Control only for hardware ISP
//获取RGB是否支持自动曝光,自动白平衡属性
bool hasAUTOEXPOSURE, hasAUTOAWB;
ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_RGB_CAM, TY_BOOL_AUTO_EXPOSURE, &hasAUTOEXPOSURE));
ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_RGB_CAM, TY_BOOL_AUTO_AWB, &hasAUTOAWB));
if (hasAUTOEXPOSURE)
{
ASSERT_OK(TYSetBool(hDevice, TY_COMPONENT_RGB_CAM, TY_BOOL_AUTO_EXPOSURE, true));//turn on AEC 自动曝光
}
////开启自动曝光后,可绘制局部ROI
//TY_AEC_ROI_PARAM aec_roi_param;
//aec_roi_param.x = 233;
//aec_roi_param.y = 424;
//aec_roi_param.w = 394;
//aec_roi_param.h = 228;
//ASSERT_OK(TYSetStruct(hDevice, TY_COMPONENT_RGB_CAM, TY_STRUCT_AEC_ROI, &aec_roi_param, sizeof(TY_AEC_ROI_PARAM)));
if (hasAUTOAWB)
{
ASSERT_OK(TYSetBool(hDevice, TY_COMPONENT_RGB_CAM, TY_BOOL_AUTO_AWB, true));//turn on AWB 白平衡,校正图像色彩
}
//获取RGB支持的属性
bool hasRGB_R_GAIN, hasRGB_B_GAIN, hasRGB_EXPOSURE_TIME;
ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_R_GAIN, &hasRGB_R_GAIN));
ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_B_GAIN, &hasRGB_B_GAIN));
ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_EXPOSURE_TIME, &hasRGB_EXPOSURE_TIME));
if (hasRGB_R_GAIN)
{
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_R_GAIN, 400));//设置RGB数字增益R通道[0,1024]
}
if (hasRGB_B_GAIN)
{
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_B_GAIN, 400));//设置RGB数字增益B通道[0,1024]
}
if (hasRGB_EXPOSURE_TIME)
{
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_EXPOSURE_TIME, 500));//设置RGB曝光时间[0,1080]
}
//使能深度相机
//try to enable depth cam
LOGD("=== Configure components, open depth cam");
int32_t componentIDs = TY_COMPONENT_DEPTH_CAM;
ASSERT_OK( TYEnableComponents(hDevice, componentIDs) );
//使能IR相机
//try to enable ir cam
LOGD("=== Configure components, open ir cam");
ASSERT_OK(TYEnableComponents(hDevice, TY_COMPONENT_IR_CAM_LEFT));
//设置深度图分辨率
LOGD("=== Configure feature, set depth resolution");
//方法一:直接设置分辨率 depth16_640x480\320x240\160x120
//ASSERT_OK(TYSetEnum(hDevice, TY_COMPONENT_DEPTH_CAM, TY_ENUM_IMAGE_MODE, TY_IMAGE_MODE_DEPTH16_640x480));
//
//方法二:通过枚举相机支持的图像模式,结合图像宽度选定分辨率,不关注具体分辨率
if (TY_COMPONENT_DEPTH_CAM)
{
std::vector<TY_ENUM_ENTRY> image_mode_list;
status = get_feature_enum_list(hDevice, TY_COMPONENT_DEPTH_CAM, TY_ENUM_IMAGE_MODE, image_mode_list);
for (int idx = 0; idx < image_mode_list.size(); idx++)
{
TY_ENUM_ENTRY &entry = image_mode_list[idx];
//try to select a resolution
if (TYImageWidth(entry.value) == 640)
{
LOGD("Select Depth Image Mode: %s", entry.description);
int err = TYSetEnum(hDevice, TY_COMPONENT_DEPTH_CAM, TY_ENUM_IMAGE_MODE, entry.value);
ASSERT(err == TY_STATUS_OK || err == TY_STATUS_NOT_PERMITTED);
status = TYEnableComponents(hDevice, TY_COMPONENT_DEPTH_CAM);
break;
}
}
}
//读取深度相机内参和深度相机标定数据
LOGD("=== Get depth intrinsic");
ASSERT_OK(TYGetStruct(hDevice, TY_COMPONENT_DEPTH_CAM, TY_STRUCT_CAM_INTRINSIC, &intri_depth, sizeof(intri_depth)));
LOGD("=== Read depth calib data");
ASSERT_OK(TYGetStruct(hDevice, TY_COMPONENT_DEPTH_CAM, TY_STRUCT_CAM_CALIB_DATA
, &cb_data.depth_calib, sizeof(cb_data.depth_calib)));
//*************************************************
// you can set TOF camera feature here.
ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_DEPTH_CAM, TY_STRUCT_CAM_DISTORTION, &isTof));
if (isTof)
{
bool hasIR_HDR;
// Set DEPTH_QUALITY 2对应medium模式,medium:深度值抖动幅度中等,输出帧率中等。4对应high模式,high:深度值抖动幅度小,输出帧率低
int quality = 2; // 2,4
LOGD("Set DEPTH_QUALITY %d", quality);
ASSERT_OK(TYSetEnum(hDevice, TY_COMPONENT_DEPTH_CAM, TY_ENUM_DEPTH_QUALITY, quality));
// Set TOF_CHANNEL 设置 ToF 深度相机调制频道。不同调制频道的调制频率不同,互不干扰,设置成4为双波段,对黑色成像较好,但是深度图容易弯曲
int channel = 0; // 0,1,2,3,4
LOGD("Set TOF_CHANNEL %d", channel);
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_DEPTH_CAM, TY_INT_TOF_CHANNEL, channel));
// Set TOF_MODULATION_THRESHOLD 小于此阈值的像素点不参与计算深度,即像素点的深度值赋值为 0。
int modulation = 600;
LOGD("Set TOF_MODULATION_THRESHOLD %d", modulation);
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_DEPTH_CAM, TY_INT_TOF_MODULATION_THRESHOLD, modulation));
// Set FILTER_THRESHOLD 用于设置 ToF 深度相机的飞点滤波阈值。滤波阈值设置越小,过滤的飞点越多。
int filter = 0; //(0,100)
LOGD("Set FILTER_THRESHOLD %d", filter);
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_DEPTH_CAM, TY_INT_FILTER_THRESHOLD, filter));
// Set TOF_JITTER_THRESHOLD 用于设置 ToF 深度相机的抖动过滤阈值。阈值设置值越大,深度图边缘抖动的深度数据过滤得越少。
bool hasJITTER_THRESHOLD = false;
ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_DEPTH_CAM, TY_INT_TOF_JITTER_THRESHOLD, &hasJITTER_THRESHOLD));
if (hasJITTER_THRESHOLD)
{
int jitter = 6; //(1,10) 针对黑色托盘,点云边缘缺失时,可适当增加该值
LOGD("Set TOF_JITTER_THRESHOLD %d", jitter);
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_DEPTH_CAM, TY_INT_TOF_JITTER_THRESHOLD, jitter));
}
// Set EXPOSURE_TIME (60,240000)
bool hasleftIR_Exposure;
ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_IR_CAM_LEFT, TY_INT_EXPOSURE_TIME, &hasleftIR_Exposure));
if (hasleftIR_Exposure)
{
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_IR_CAM_LEFT, TY_INT_EXPOSURE_TIME, 240000));
}
//开启HDR功能,需要先关闭Depth Stream,之后将 depth quality 设置为 high,之后再打开Depth Stream,设置HDR ratio
ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_IR_CAM_LEFT, TY_BOOL_HDR, &hasIR_HDR));
if (hasIR_HDR)
{
ASSERT_OK(TYSetBool(hDevice, TY_COMPONENT_IR_CAM_LEFT, TY_BOOL_HDR, true));//设置开启HDR功能
}
////set TY_INT_MAX_SPECKLE_SIZE
//bool hasMAX_SPECKLE_SIZE = false;
//ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_DEPTH_CAM, TY_INT_MAX_SPECKLE_SIZE, &hasMAX_SPECKLE_SIZE));
//if (hasMAX_SPECKLE_SIZE)
//{
// int speckle_size = 50; //(0,200) //噪点面积小于该值将被过滤
// LOGD("Set MAX_SPECKLE_SIZE %d", speckle_size);
// ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_DEPTH_CAM, TY_INT_MAX_SPECKLE_SIZE, speckle_size));
//}
////set TY_INT_MAX_SPECKLE_DIFF
//bool hasMAX_SPECKLE_DIFF = false;
//ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_DEPTH_CAM, TY_INT_MAX_SPECKLE_DIFF, &hasMAX_SPECKLE_DIFF));
//if (hasMAX_SPECKLE_DIFF)
//{
// int speckle_diff = 100; //(100,500) //相邻像素视差大于该值将被视为噪点
// LOGD("Set MAX_SPECKLE_DIFF %d", speckle_diff);
// ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_DEPTH_CAM, TY_INT_MAX_SPECKLE_DIFF, speckle_diff));
//}
}
//*************************************************
//获取所需Buffer大小
LOGD("=== Prepare image buffer");
uint32_t frameSize;
ASSERT_OK( TYGetFrameBufferSize(hDevice, &frameSize) );
LOGD(" - Get size of framebuffer, %d", frameSize);
//分配两个Buffer,并压入队列
LOGD(" - Allocate & enqueue buffers");
char* frameBuffer[2];
frameBuffer[0] = new char[frameSize];
frameBuffer[1] = new char[frameSize];
LOGD(" - Enqueue buffer (%p, %d)", frameBuffer[0], frameSize);
ASSERT_OK( TYEnqueueBuffer(hDevice, frameBuffer[0], frameSize) );
LOGD(" - Enqueue buffer (%p, %d)", frameBuffer[1], frameSize);
ASSERT_OK( TYEnqueueBuffer(hDevice, frameBuffer[1], frameSize) );
//注册事件回调
bool device_offline = false;;
LOGD("=== Register event callback");
ASSERT_OK(TYRegisterEventCallback(hDevice, eventCallback, &device_offline));
uint32_t accept_percent = 90;
LOGD("Set acceptable ratio to %d", accept_percent);
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_DEVICE, TY_INT_ACCEPTABLE_PERCENT, accept_percent));
//设置触发模式
/*bool hasTrigger;
ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_PARAM, &hasTrigger));
if (hasTrigger)
{
LOGD("Disable trigger mode");
TY_TRIGGER_PARAM trigger;
trigger.mode = TY_TRIGGER_MODE_OFF;
ASSERT_OK(TYSetStruct(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_PARAM, &trigger, sizeof(trigger)));
}*/
//触发模式设置
bool hasTrigger;
ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_PARAM, &hasTrigger));
if (hasTrigger)
{
TY_TRIGGER_PARAM trigger;
//trigger.mode = TY_TRIGGER_MODE_OFF;//连续采集模式
LOGD("=== enable trigger mode");
trigger.mode = TY_TRIGGER_MODE_SLAVE;//软触发和硬触发模式
ASSERT_OK(TYSetStruct(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_PARAM, &trigger, sizeof(trigger)));
//bool hasDI0_WORKMODE;
//ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_DI0_WORKMODE, &hasDI0_WORKMODE));
//if (hasDI0_WORKMODE)
//{
// //硬触发模式防抖
// TY_DI_WORKMODE di_wm;
// di_wm.mode = TY_DI_PE_INT;
// di_wm.int_act = TY_DI_INT_TRIG_CAP;
// uint32_t time_hw = 10;//单位ms,硬件滤波,小于设定时间的电平信号会被过滤
// uint32_t time_sw = 200;//单位ms,软件滤波,连续高频触发情形,小于设置周期的后一个触发信号将被过滤
// di_wm.reserved[0] = time_hw | (time_sw << 16);
// ASSERT_OK(TYSetStruct(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_DI0_WORKMODE, &di_wm, sizeof(di_wm)));
//}
}
//网口相机,启用丢包重传功能
//for network only
LOGD("=== resend: %d", resend);
if (resend)
{
bool hasResend;
ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_DEVICE, TY_BOOL_GVSP_RESEND, &hasResend));
if (hasResend)
{
LOGD("=== Open resend");
ASSERT_OK(TYSetBool(hDevice, TY_COMPONENT_DEVICE, TY_BOOL_GVSP_RESEND, true));
}
else
{
LOGD("=== Not support feature TY_BOOL_GVSP_RESEND");
}
}
//开始采集
LOGD("=== Start capture");
ASSERT_OK( TYStartCapture(hDevice) );
//回调数据初始化
cb_data.index = 0;
cb_data.hDevice = hDevice;
cb_data.saveOneFramePoint3d = false;
cb_data.fileIndex = 0;
cb_data.intri_depth = &intri_depth;
cb_data.intri_color = &intri_color;
float scale_unit = 1.;
TYGetFloat(hDevice, TY_COMPONENT_DEPTH_CAM, TY_FLOAT_SCALE_UNIT, &scale_unit);
cb_data.scale_unit = scale_unit;
cb_data.isTof = isTof;
//循环取图
LOGD("=== While loop to fetch frame");
TY_FRAME_DATA frame;
bool exit_main = false;
int index = 0;
while(!exit_main)
{
auto timeTrigger = std::chrono::steady_clock::now();
//发送一次软触发
while (TY_STATUS_BUSY == TYSendSoftTrigger(hDevice));
//获取帧,默认超时设置为10s
int err = TYFetchFrame(hDevice, &frame, 3000);
auto timeGetFrame = std::chrono::steady_clock::now();
auto duration = std::chrono::duration_cast<std::chrono::microseconds>(timeGetFrame - timeTrigger);
LOGI("*******FetchFrame spend Time : %lld", duration);
if( err != TY_STATUS_OK )
{
LOGD("receiving data timeout");
fetch_timeout++;
LOGD("... Drop one frame");
continue;
}
if (err == TY_STATUS_OK)
{
LOGD("Get frame %d", ++index);
int fps = get_fps();
if (fps > 0)
{
LOGI("***************************fps: %d", fps);
}
}
frameHandler(&frame, &cb_data);
int key = cv::waitKey(1);
switch (key & 0xff)
{
case 0xff:
break;
case 'q':
exit_main = true;
break;
case 's':
cb_data.saveOneFramePoint3d = true;//图片显示窗口上按s键则存一张点云图
break;
default:
LOGD("Pressed key %d", key);
}
TY_CAMERA_STATISTICS st;
ASSERT_OK(TYGetStruct(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_CAM_STATISTICS, &st, sizeof(st)));
LOGI("Statistics:");
LOGI(" packetReceived: %" PRIu64 " ", st.packetReceived);
LOGI(" packetLost : %" PRIu64 " ", st.packetLost);
LOGI(" imageOutputed : %" PRIu64 " ", st.imageOutputed);
LOGI(" imageDropped : %" PRIu64 " ", st.imageDropped);
std::cout << "fetch timeout" << fetch_timeout << std::endl;
}
ASSERT_OK( TYStopCapture(hDevice) );
ASSERT_OK( TYCloseDevice(hDevice) );
ASSERT_OK( TYCloseInterface(hIface) );
ASSERT_OK( TYDeinitLib() );
delete frameBuffer[0];
delete frameBuffer[1];
LOGD("=== Main done!");
return 0;
}4.新(4.X.X)旧(3.X.X)SDK主要区别
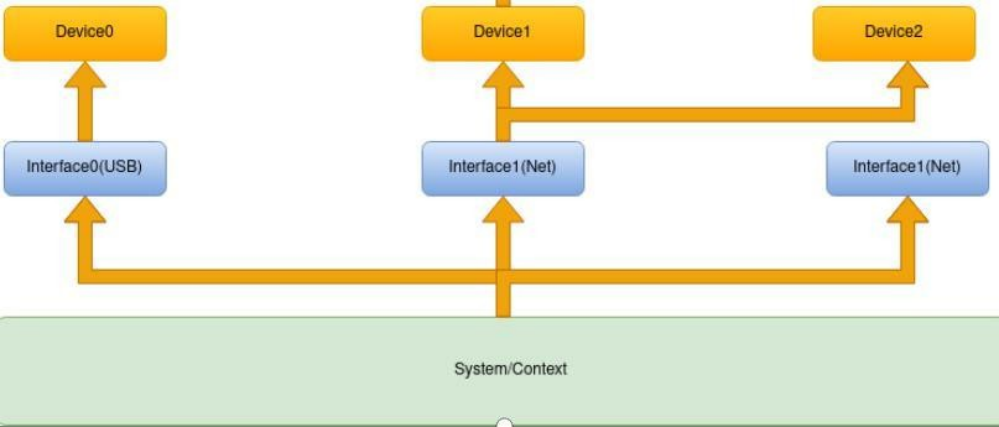
4.1 3.X.X版本SDK基本概念
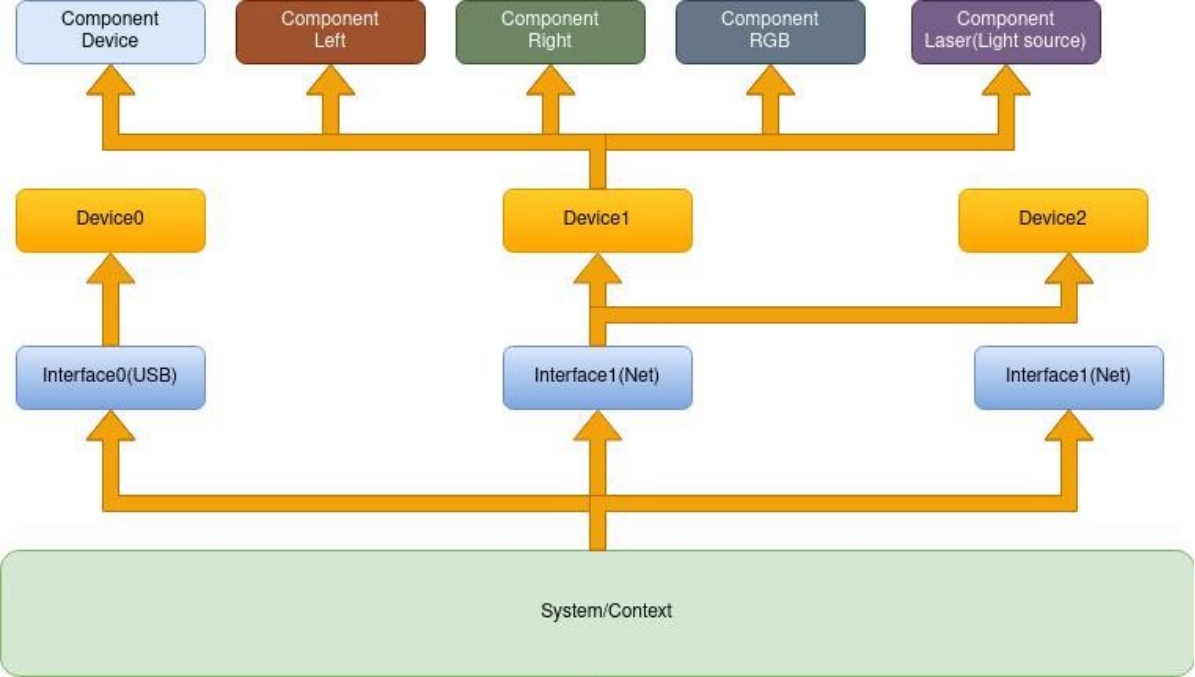
4.1.1 SDK3.0接口介绍(TYParameter.h)
4.1.1.1 System
1.TYInitLib/TYDeinitLib/TYLibVersion
2.TYSetLogLevel/TYSetLogPrefix/TYSetLogPrefix/TYRemoveLogFile/TYRemoveLogFile/TYRe moveLogFile
3.TYUpdateInterfaceList/TYGetInterfaceNumber/TYGetInterfaceList/TYHasInterface/TYOpenInter face
4.1.1.2 Interface
1.TYCloseInterface
2.TYUpdateDeviceList/TYUpdateAllDeviceList/TYGetDeviceNumber/TYGetDeviceList/TYHasDe 3.vice/TYOpenDevice/TYOpenDeviceWithIP
4.TYForceDeviceIP
4.1.1.3 Device
1.TYGetDeviceInterface
2.TYCloseDevice/TYGetDeviceInfo
3.TYGetComponentIDs/TYGetEnabledComponents/TYEnableComponents/TYDisableComponents
4.TYGetFrameBufferSize/TYEnqueueBuffer/TYClearBufferQueue/TYFeatchFrame
5.TYStartCapture/TYStopCapture/TYSendSoftTrigger
6.TYRegisterEventCallback/TYRegisterImuCallback
7.TYGetDeviceXMLSize/TYGetDeviceXML
4.1.1.4 Component
1.TYGetDeviceFeatureNumber/TYGetDeviceFeatureInfo
4.1.1.5 Feature
1.TYHasFeature/TYGetFeatureInfo
2.TYGetIntRange/TYGetInt/TYSetInt
3.TYGetFloatRange/TYGetFloat/TYSetFloat
4.TYGetEnumEntryCount/TYGetEnumEntryInfo/TYGetEnum/TYSetEnum
5.TYGetBool/TYSetBool
6.TYGetStringLength/TYGetString/TYSetString
7.TYGetStruct/TYSetStruct
8.TYGetByteArraySize/TYGetByteArray/TYSetByteArray/TYGetByteArrayAttr
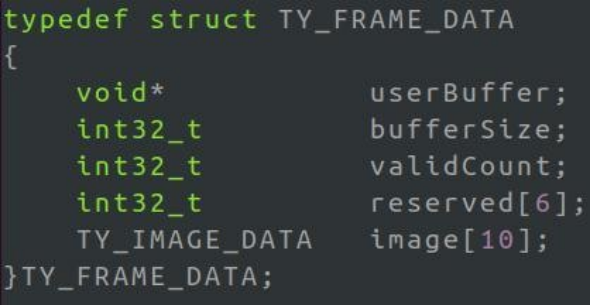
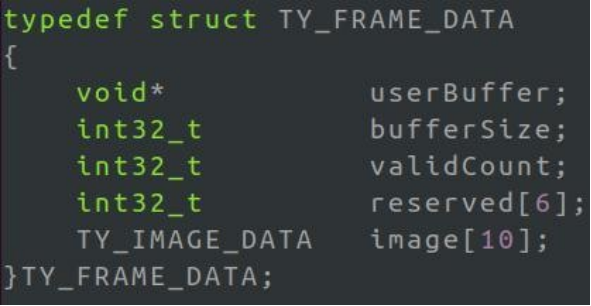
4.1.1.6 FrameData
4.2 4.X.X版本SDK基本概念
Deivce/Interface/System和SDK3.x一致
4.2.1 SDK4.0接口介绍(TYParameter.h)
4.2.1.1 Common
1.TYParamGetToolTip/TYParamGetDescriptor/TYParamGetDisplayName
2.TYParamGetType/TYParamGetAccess/TYParamGetVisibility
4.2.1.2 Command
1.TYCommandExec
4.2.1.3 Interger
1.TYIntegerSetValue/TYIntegerGetValue
2.TYIntegerGetMin/TYIntegerGetMax
3.TYIntegerGetStep/TYIntegerGetUnit
4.2.1.4 Float
1.TYFloatSetValue/TYFloatGetValue
2.TYFloatGetMin/TYFloatGetMax
3.TYFloatGetStep/TYFloatGetUnit
4.2.1.5 Boolean
1.TYBooleanSetValue/TYBooleanGetValue
4.2.1.6 Enumeration
1.TYEnumSetValue/TYEnumSetString/TYEnumGetValue/TYEnumGetString
2.TYEnumGetEntryCount/TYEnumGetEntryInfo
4.2.1.7 String
1.TYStringSetValue/TYStringGetLength/TYStringGetValue
4.2.1.8 ByteArray
1.TYByteArrayGetSize/TYByteArraySetValue/TYByteArrayGetValue
4.2.2 SDK4.0新增功能点介绍
新增UserSet功能
增加了数据流流控
4.3 SDK4.0和SDK3.0功能点对比
1.XML修改为直接符合GenICa m标准的格式
2.删除struct 类型,全转换成分散的feature
3.增加Command 类型
4.删除Resend 开关,修改逻辑为如果Device支持,则默认开启
5.设备寄存器是保留的,直到掉电或者调用DeviceReset
6.删除原有的ImageMode ,拆分为Width/Height+Binnig和PixelFmt, 其中width/height为属性,与sensor硬件相关, 其他分辨率通过binning来实现,目前BinningHorizontal和BinningVertical为绑定关系,暂时不支持只一个方向binning;
5.常见问题FAQ
5.1 黑灯工厂下,单纯依靠相机自带的参曝光、增益,无法拿到可用的RGB图,该怎么解决?
5.1.1 针对无泛光的散斑相机,客户无法加补光灯
尝试让客户把深度图做颜色渲染,之后存带渲染的深度图,之后拿渲染过的深度图做模型训练,实测可行性一般
5.1.2 针对无泛光的散斑相机,客户增加补光灯
在车上加补光灯,如在使用FM851-E2相机时,AGV车上添加了补光灯,此时RGB较暗的问题可解决。
5.1.3 .针对有泛光的散斑相机,可开启泛光
如FM855-E1-G相机,相机自身带RGB泛光,在黑暗环境下,开启泛光,RGB较暗的问题可解决。
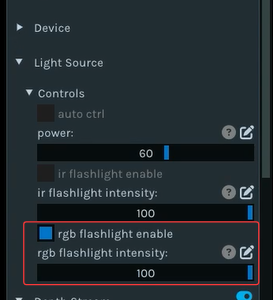
而FM855-E1-G相机,在实际黑暗环境下,拍摄黑托盘成像如下:
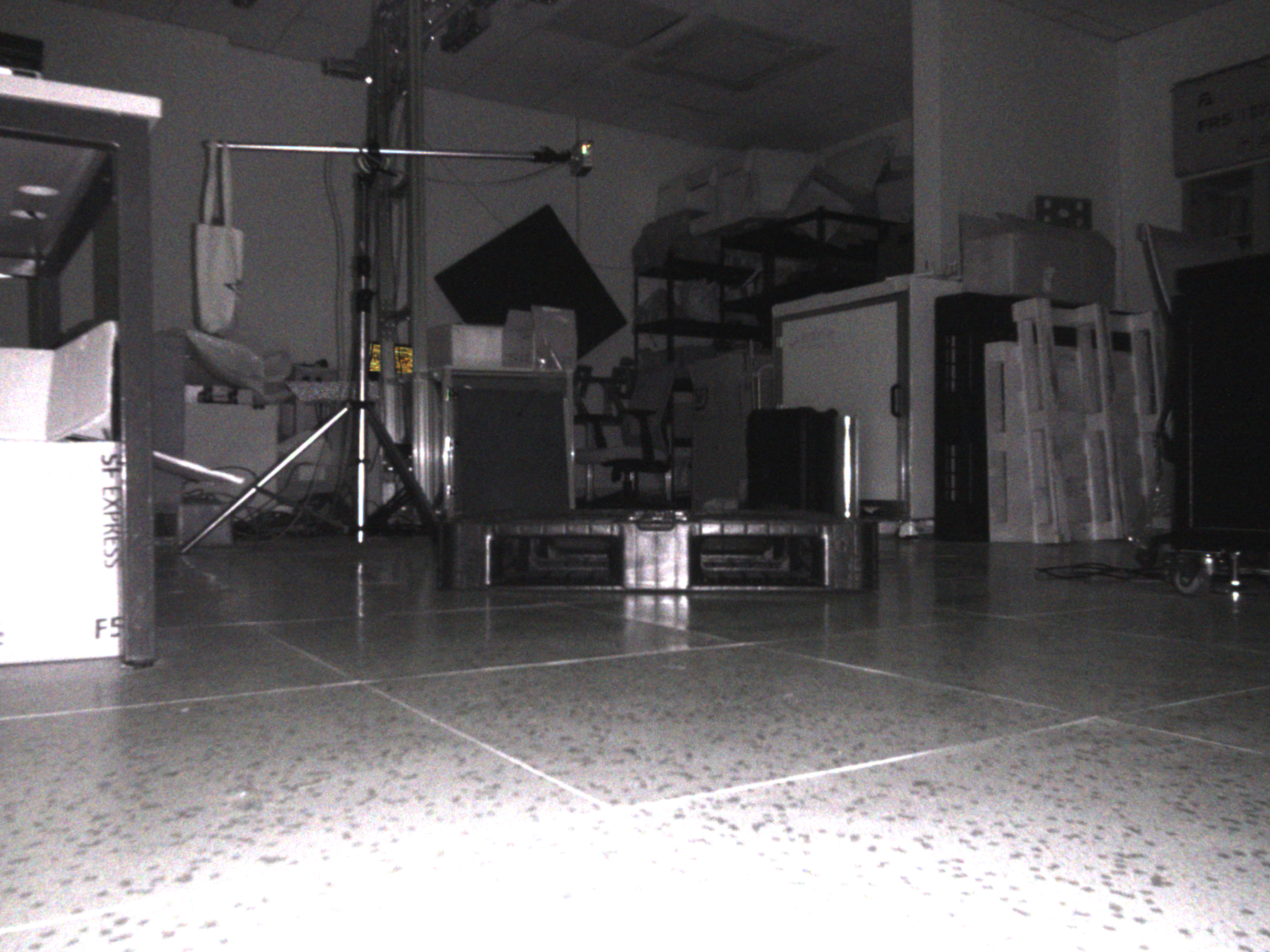
5.1.4 TOF相机,使用相机IR图
之前SDK提供的五种提升IR对比度的方式,实测下来,只有基于LinearStretchStdProcesser标准差和NoLinearStretchHistProcesser直方图的线性拉伸这两种较为有效。
5.2 TOF相机IR图增强方式
1.首先需要使能IR组件
cpp
//使能IR相机
LOGD("=== Configure components, open ir cam");
ASSERT_OK(TYEnableComponents(hDevice, TY_COMPONENT_IR_CAM_LEFT));2.解析图像
cpp
//解析图像帧
parseFrame(*frame, &depth, &ir, 0, &color);//拿深度图和color图3.校正IR图像畸变
cpp
//IR图畸变校正
TY_IMAGE_DATA src1;
src1.width = ir.cols;
src1.height = ir.rows;
src1.size = ir.size().area() * 2;
src1.pixelFormat = TY_PIXEL_FORMAT_MONO16;
src1.buffer = ir.data;
cv::Mat undistort_ir = cv::Mat(ir.size(), CV_16U);
TY_IMAGE_DATA dst1;
dst1.width = ir.cols;
dst1.height = ir.rows;
dst1.size = undistort_ir.size().area() * 2;
dst1.buffer = undistort_ir.data;
dst1.pixelFormat = TY_PIXEL_FORMAT_MONO16;
ASSERT_OK(TYUndistortImage(&pData->depth_calib, &src1, NULL, &dst1));
ir = undistort_ir.clone();4.对IR图进行后处理
cpp
//IR图线性拉伸 //result=(grayIr-min(grayIr))* 255.0 / (max(grayIr) - min(grayIr))
bool IR_LinearStretch = 0;
//IR图通过扩展比例对图像的像素值进行线性变换 // result=src*multi_expandratio
bool IR_LinearStretchMulti = 1;
//IR图基于标准差的线性拉伸 // result=grayIr*255.0/(std_expandratio*std(grayIr));
bool IR_LinearStretchStd = 0;
//IR图基于对数变换的非线性拉伸 //result = log_expandratio * log2(src)
bool IR_NoLinearStretchLog2 = 0;
//IR图基于直方图的非线性拉伸 // result=equalizeHist(src)
bool IR_NoLinearStretchHist = 0;5.2.1 IR图线性拉伸
cpp
cv::Mat meanvalue, stdvalue;
cv::Mat result;
double minVal, maxVal;
//IR图线性拉伸
if (IR_LinearStretch)
{
cv::Mat meanvalue, stdvalue;
cv::meanStdDev(ir, meanvalue, stdvalue);
//线性拉伸一般使用默认值
double std_expandratio = 6;
double use_norm_std = stdvalue.ptr<double>(0)[0];
double use_norm = use_norm_std * std_expandratio + 1.0;
cv::minMaxLoc(ir, &minVal, &maxVal);
ir.convertTo(result, CV_8UC1, 255.0 / use_norm);
cv::imshow("IR_LinearStretch", result);
cv::imwrite("IR_LinearStretch.png", result);
}5.2.2 扩展比例对图像的像素值进行线性变换
cpp
//通过扩展比例对图像的像素值进行线性变换
if (IR_LinearStretchMulti)
{
//对应对应PercipioViewer软件中的digital gain,范围(2,20),默认值为8,数值越大,图像越亮。
double multi_expandratio = 8;
ir.convertTo(result, CV_8UC1, multi_expandratio / 255.0);
cv::imshow("IR_LinearStretchMulti", result);
cv::imwrite("IR_LinearStretchMulti.png", result);
}5.2.3 基于标准差的线性拉伸
cpp
if (IR_LinearStretchStd)
{
//对应PercipioViewer软件中的std gain,范围(2,20),默认值为6,数值越小,图像越亮。
double std_expandratio = 2;
cv::meanStdDev(ir, meanvalue, stdvalue);
double use_norm_std = stdvalue.ptr<double>(0)[0];
double use_norm = use_norm_std * std_expandratio + 1.0;
double minVal, maxVal;
cv::minMaxLoc(ir, &minVal, &maxVal);
ir.convertTo(result, CV_8UC1, 255.0 / use_norm);
cv::imshow("IR_LinearStretchStd", result);
cv::imwrite("IR_LinearStretchStd.png", result);
}5.2.4 基于对数变换的非线性拉伸
cpp
if (IR_NoLinearStretchLog2)
{
int rows = ir.rows;
int cols = ir.cols;
result = cv::Mat::zeros(rows, cols, CV_8UC1);
//对应PercipioViewer软件中的log gain,范围(5,50),默认值为20,数值越大,图像越亮。
double log_expandratio = 15;
for (int i = 0; i < rows; i++)
{
uint16_t* in = ir.ptr<uint16_t>(i);
uint8_t* out = result.ptr<uint8_t>(i);
for (int j = 0; j < cols; j++)
{
uint16_t inone = in[j];
int outone = log_expandratio * log2(inone);
outone = outone < 255 ? outone : 255;
out[j] = uint8_t(outone);
}
}
cv::imshow("IR_NoLinearStretchLog2", result);
cv::imwrite("IR_NoLinearStretchLog2.png", result);
}5.2.5 基于直方图的非线性拉伸
cpp
if (IR_NoLinearStretchHist)
{
cv::Mat ir8;
double minVal, maxVal;
cv::minMaxLoc(ir, &minVal, &maxVal);
// 线性拉伸到0-255范围
ir.convertTo(ir8, CV_8UC1, 255.0 / (maxVal - minVal), -minVal * 255.0 / (maxVal - minVal));
cv::equalizeHist(ir8, result);
cv::imshow("IR_NoLinearStretchHist", result);
cv::imwrite("IR_NoLinearStretchHist.png", result);
}5.2.6 Gamma校正
待补充