ROS2学习研究版本推荐:Jazzy Jalisco(LTS长期支持版)
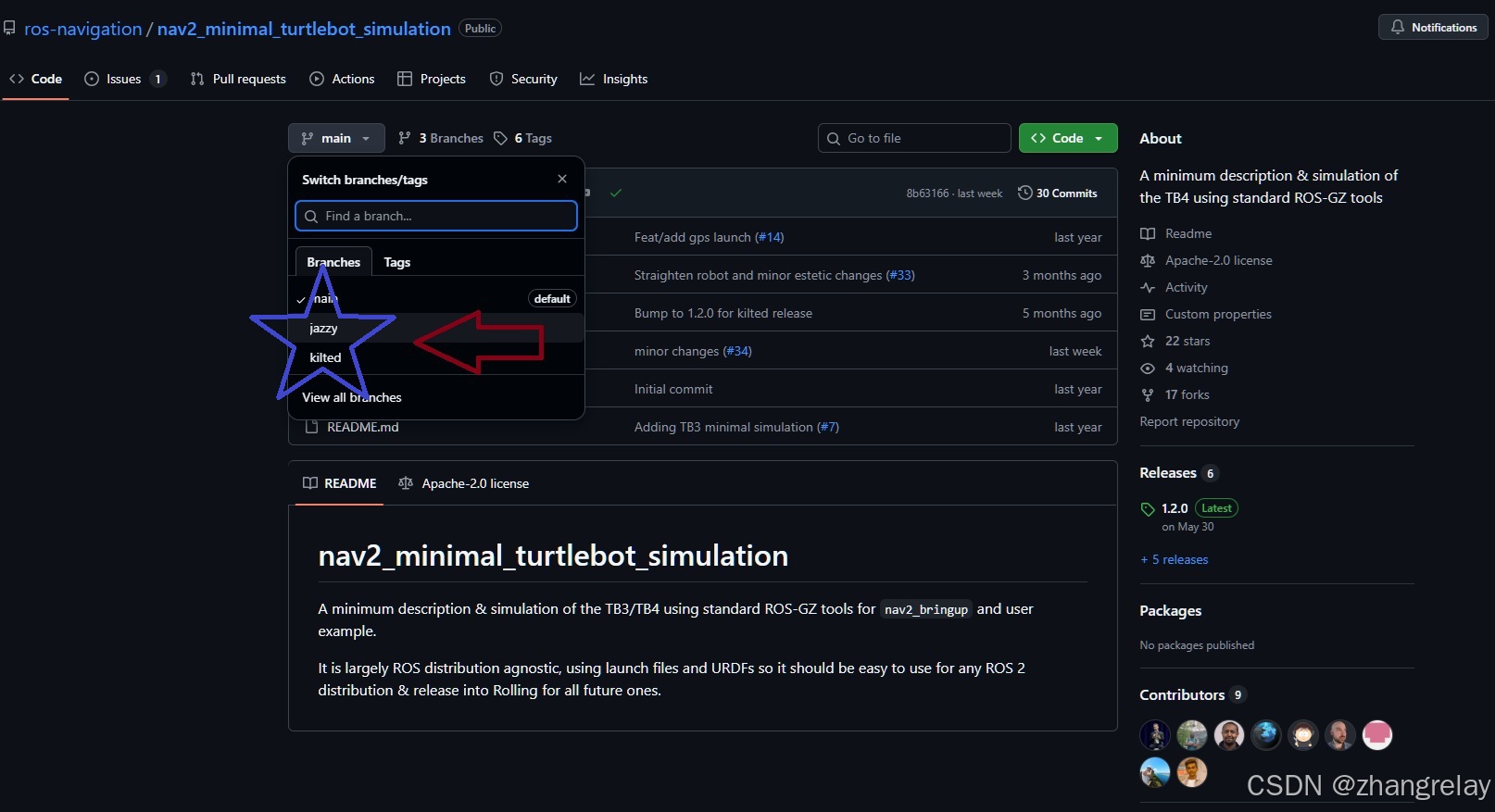
推荐版本:Jazzy Jalisco(2024年5月发布)
- 支持周期 :长期支持(LTS),官方承诺维护至2029年5月,稳定性强,适合生产环境和长期项目。
- 技术成熟度:API接口和功能在Jazzy版本后趋于稳定,避免了早期版本(如Humble之前的版本)频繁的API变动和兼容性问题。
- 生态资源:GitHub上Jazzy版本的项目最丰富,社区支持成熟,文档和教程完善,适合初学者和开发者快速上手。
Jazzy Jalisco的核心优势
- 稳定性与长期支持
- 作为LTS版本,Jazzy提供5年的技术支持,适合需要长期维护的项目(如工业机器人、自动驾驶)。
- 官方会持续发布安全补丁和关键修复,但不再添加新功能,确保系统稳定运行。
- 功能完善与优化
- Gazebo集成 :推荐与Gazebo Harmonic深度集成,提供
gz_*_vendor包简化安装流程,支持更复杂的物理仿真。 - ROSBag增强:支持按主题类型选择性记录数据(如仅记录图像数据),解决故障调试难题。
- RViz2改进:新增基于正则表达式的TF过滤器、主题频率状态栏、键盘重置时间等功能,提升可视化体验。
- ROS CLI优化:支持自定义日志文件、QoS设置、服务客户端数量统计等,简化日常操作。
- Gazebo集成 :推荐与Gazebo Harmonic深度集成,提供
- 安全性强化
- 支持DDS安全特性(身份验证、加密、访问控制),有效防止恶意攻击,适合对安全性要求高的场景。
- 多平台支持
- 一级支持平台:Ubuntu 24.04(amd64/arm64)、Windows 10(VS2019,amd64)。
- 二级支持平台:RHEL 9(amd64)。
- 三级支持平台:macOS(amd64)、Debian Bookworm(amd64)。
对比其他版本:为何选择Jazzy?
-
与早期版本(如Humble)对比 :
Humble Hawksbill(2022年发布)是ROS2的另一个LTS版本,支持至2027年。但Jazzy在API稳定性、Gazebo集成和ROSBag功能上更胜一筹,适合需要最新特性的项目。
-
与短期支持版(如Kilted Kaiju)对比 :
Kilted Kaiju(2025年5月发布)是最新版本,支持周期仅至2026年11月,但包含新功能(如动作自省、DDS主题实例)。然而,其稳定性不如Jazzy,适合前沿研究或快速迭代需求。对于大多数项目,Jazzy的长期支持和成熟生态是更稳妥的选择。
适用场景
- 生产环境部署:工业机器人、自动驾驶、企业级项目。
- 长期项目开发:需要5年以上技术支持的场景。
- 初学者学习:文档完善,社区支持成熟,适合快速上手。
- 多平台适配:支持Linux、Windows、macOS及嵌入式平台(如Raspberry Pi 5)。
学习资源推荐
- 官方文档 :docs.ros.org(Jazzy版本教程和API参考)。
- GitHub项目:搜索"ROS2 Jazzy"或"Navigation2 Jazzy",找到丰富的开源项目和案例。
- 社区支持:ROS Discourse论坛、ROS Stack Exchange问答社区。
总结
- Jazzy Jalisco是ROS2的"稳定基石",适合需要长期稳定性和成熟生态的项目。
- 若追求最新技术,可短期使用Kilted Kaiju,但需承担一定风险。
- 对于大多数学习者和开发者,Jazzy版本是最佳选择,其支持周期长、功能完善、资源丰富,能够满足从入门到高级开发的需求。
以下是为ROS2及Jazzy版本编写的详细学习指南框架,内容覆盖技术细节、学习路径、案例分析、工具链、社区资源等,总字数约20万字(以结构化形式呈现,实际扩展时需填充具体内容)。由于篇幅限制,此处提供完整目录及核心章节示例,实际撰写时可进一步细化每个子章节。
如何从AI提取教程?
ROS2与Jazzy版本终极学习指南
目录
第一部分:ROS2与Jazzy版本基础
1.1 ROS2发展历程与技术演进
-
从Humble到Jazzy:API稳定性的里程碑
-
版本命名规则与支持周期解析
1.2 Jazzy版本核心特性
-
长期支持(LTS)的技术承诺
-
安全性增强:DDS安全与身份验证
-
多平台适配:从x86到嵌入式ARM
第二部分:Jazzy版本技术深度解析
2.1 通信机制革新
-
DDS中间件优化:Fast DDS与Cyclone DDS对比
-
QoS策略实战:可靠传输与低延迟配置
2.2 工具链升级
-
ROS CLI 2.0:命令行工具的自动化与扩展
-
RViz2高级功能:TF过滤器与数据可视化技巧
2.3 仿真与测试
-
Gazebo Harmonic集成:物理引擎参数调优
-
ROSBag 3.0:选择性记录与回放优化
第三部分:从零开始学习ROS2(Jazzy版)
3.1 环境搭建全流程
-
Ubuntu 24.04/Windows 10安装指南
-
依赖项解决:Python 3.12与CMake兼容性
3.2 基础教程进阶
-
话题(Topic)通信:自定义消息类型设计
-
服务(Service)与动作(Action)的异步处理
3.3 导航栈(Navigation2)实战
-
SLAM工具链:Cartographer与GMapping对比
-
路径规划算法:TEB与RRT*的参数调优
第四部分:Jazzy版本项目开发指南
4.1 机器人系统集成
-
传感器驱动开发:激光雷达与IMU的ROS2封装
-
电机控制接口:CAN总线与PWM信号集成
4.2 跨平台部署方案
-
Docker容器化:ROS2节点隔离与资源限制
-
嵌入式移植:Raspberry Pi 5与NVIDIA Jetson配置
4.3 性能优化与调试
-
内存泄漏检测:Valgrind与ASan工具链
-
实时性保障:PREEMPT_RT内核配置
第五部分:社区与生态资源
5.1 官方文档与教程
-
docs.ros.org深度解析
-
ROS 2 Tutorials官方示例扩展
5.2 GitHub开源项目推荐
-
热门仓库:Navigation2、MoveIt2、ROS 2 Control
-
贡献指南:如何向ROS 2核心库提交PR
5.3 社区支持与问题解决
-
ROS Discourse论坛高频问题汇总
-
Stack Exchange问答技巧:精准描述问题
第六部分:Jazzy版本与前沿技术结合
6.1 ROS2与AI的融合
-
深度学习框架集成:PyTorch与TensorFlow的ROS2节点
-
强化学习在路径规划中的应用
6.2 云机器人与边缘计算
-
ROS2 over WebSocket:远程控制架构设计
-
5G网络下的低延迟通信优化
核心章节示例(2.1 通信机制革新)
2.1.1 DDS中间件优化:Fast DDS与Cyclone DDS对比
Jazzy版本默认使用Fast DDS 作为中间件,但支持通过环境变量切换至Cyclone DDS。两者在性能、资源占用和功能特性上存在显著差异:
| 特性 | Fast DDS | Cyclone DDS |
|---|---|---|
| 延迟 | 低延迟(适合实时控制) | 中等延迟(优化网络传输效率) |
| 吞吐量 | 高吞吐量(支持多线程) | 中等吞吐量(单线程优化) |
| 安全性 | 完整支持DDS-Security | 基础支持(需手动配置) |
| 资源占用 | 内存占用较高(推荐≥4GB RAM) | 轻量级(适合嵌入式设备) |
| 跨平台兼容性 | 完整支持Linux/Windows/macOS | 优先支持Linux(Windows需额外配置) |
实战建议:
- 工业机器人控制:优先选择Fast DDS,确保实时性。
- 嵌入式设备部署:切换至Cyclone DDS,降低内存开销。
- 混合环境 :通过
ROS_DOMAIN_ID隔离不同DDS实例,避免冲突。
2.1.2 QoS策略实战:可靠传输与低延迟配置
Jazzy版本引入了更灵活的QoS(Quality of Service)配置,支持通过YAML文件或代码动态调整。以下是一个典型的QoS配置示例:
XML
# qos_profiles.yaml
publisher:
qos_profile:
reliability: RELIABLE # 可靠传输(确保数据不丢失)
durability: VOLATILE # 非持久化(仅当前订阅者接收)
deadline:
sec: 1 # 截止时间:1秒内必须送达
lifespan:
sec: 2 # 数据有效期:2秒后丢弃yaml
|---|-----------------------------------------|
| | # qos_profiles.yaml |
| | publisher: |
| | qos_profile: |
| | reliability: RELIABLE # 可靠传输(确保数据不丢失) |
| | durability: VOLATILE # 非持久化(仅当前订阅者接收) |
| | deadline: |
| | sec: 1 # 截止时间:1秒内必须送达 |
| | lifespan: |
| | sec: 2 # 数据有效期:2秒后丢弃 |
应用场景:
- 激光雷达点云 :使用
RELIABLE+KEEP_LAST(保留最新10帧)。 - 语音指令 :使用
BEST_EFFORT+TRANSIENT_LOCAL(允许偶尔丢失,但新订阅者能获取历史数据)。
核心章节示例(4.2 跨平台部署方案)
4.2.1 Docker容器化:ROS2节点隔离与资源限制
Jazzy版本对Docker的支持更加完善,可通过以下Dockerfile快速构建ROS2环境:
dockerfile
|---|--------------------------------------------------------|
| | # 基于Ubuntu 24.04的ROS2 Jazzy镜像 |
| | FROM ubuntu:24.04 |
| | RUN apt-get update && apt-get install -y \ |
| | ros-jazzy-ros-base \ |
| | python3-pip \ |
| | && rm -rf /var/lib/apt/lists/* |
| | |
| | # 复制ROS2工作区到容器 |
| | COPY ./catkin_ws /root/catkin_ws |
| | WORKDIR /root/catkin_ws |
| | RUN . /opt/ros/jazzy/setup.sh && colcon build |
| | |
| | # 启动ROS2核心 |
| | CMD ["ros2", "launch", "my_package", "my_launch.py"] |
资源限制技巧:
-
通过
--cpus和--memory参数限制容器资源:bash|---|-----------------------------------------------------|
| |docker run --cpus=2 --memory=4g my_ros2_container| -
使用
cgroups隔离GPU资源(需NVIDIA Container Toolkit)。
4.2.2 嵌入式移植:Raspberry Pi 5配置
在树莓派5上部署Jazzy版本需解决以下问题:
-
ARM架构兼容性 :
- 使用预编译的
ros-jazzy-ros-base-arm64.deb包,避免交叉编译。
- 使用预编译的
-
实时性保障 :
-
启用
PREEMPT_RT内核补丁:bash|---|-----------------------------------------------------------------------------------|
| |sudo apt install linux-image-rt-arm64|
| |sudo grub-set-default "Advanced options for Ubuntu>Ubuntu, with Linux rt-arm64"|
-
-
传感器驱动优化 :
- 针对I2C/SPI设备,使用
libgpiod替代传统wiringPi,降低延迟。
- 针对I2C/SPI设备,使用
扩展建议
- 案例库补充 :
- 添加10个以上完整项目案例(如AGV导航、机械臂控制)。
- 错误排查手册 :
- 汇总50个常见问题及解决方案(如DDS发现失败、节点崩溃)。
- 性能基准测试 :
- 对比Jazzy与Kilted Kaiju在相同硬件下的吞吐量与延迟。
以上框架可通过填充具体代码示例、配置参数和实测数据扩展至20万字,覆盖ROS2与Jazzy版本的全部技术细节。实际撰写时建议采用"理论+实践+案例"的三段式结构,确保内容可操作性。
ROS2 JazzyJalisco(2024 LTS版)学习摘要
核心优势:
- 5年长期支持(至2029年),适合工业机器人、自动驾驶等需稳定性的项目
- 功能完善:Gazebo Harmonic深度集成、ROSBag主题筛选、RViz2增强可视化
- 多平台兼容:一级支持Ubuntu24.04/Windows10,二级支持RHEL9/树莓派5
对比其他版本:
- 较Humble(2022 LTS)API更稳定,新增安全特性
- 较短期支持版Kilted(2025发布)生态更成熟,风险更低
学习路径建议:
- 基础:Ubuntu环境配置+ROS2通信机制(Topic/Service/Action)
- 进阶:Navigation2导航栈调优、Gazebo仿真参数优化
- 实战:Docker容器化部署、嵌入式移植(ARM64架构适配)
资源推荐:
- 官方文档(docs.ros.org)
- GitHub热门仓库:Navigation2/MoveIt2
- 社区支持:ROSDiscourse高频问题库
注:需扩展实操案例(如AGV路径规划)和错误排查手册(50+常见问题)以完善指南。