动态目标检测与跟踪:基于卡尔曼滤波的门限关联与可视化全流程
本文系统讲解动态目标检测与跟踪 的完整工程路径:从状态/量测建模、离散过程噪声标定、预测---门限---关联---更新 的 KF 主循环,到一致性(NIS)与误差统计,并给出实验图与结果表格。脚本场景为2D 匀速目标 ,量测仅含位置,存在泊松杂波 与探测漏检。
1. 问题设定与符号
-
连续时间状态(2D 匀速/CV):位置与速度
x(t)=xx˙yy˙⊤ \mathbf{x}(t)= \begin{bmatrix} x & \dot x & y & \dot y \end{bmatrix}^{\top} x(t)=xx˙yy˙⊤ -
离散化采样周期为 TTT,离散状态转移矩阵
F=1T000100001T0001. \mathbf{F}= \begin{bmatrix} 1 & T & 0 & 0\\ 0 & 1 & 0 & 0\\ 0 & 0 & 1 & T\\ 0 & 0 & 0 & 1 \end{bmatrix}. F= 1000T100001000T1 . -
过程噪声采用离散白噪声加速度(DWNA)模型 ,等效为对 xxx、yyy 轴独立加速度激励:
wk∼N(0,,Q). \mathbf{w}_k \sim \mathcal{N}(\mathbf{0},, \mathbf{Q}). wk∼N(0,,Q). -
量测仅观测位置:
zk=xk yk=H,xk+vk,vk∼N(0,,R),H=10000010. \mathbf{z}_k= \begin{bmatrix} x_k\ y_k \end{bmatrix} = \mathbf{H},\mathbf{x}_k + \mathbf{v}_k,\quad \mathbf{v}_k \sim \mathcal{N}(\mathbf{0},,\mathbf{R}),\qquad \mathbf{H}= \begin{bmatrix} 1&0&0&0\\ 0&0&1&0 \end{bmatrix}. zk=xk yk=H,xk+vk,vk∼N(0,,R),H=10000100. -
检测过程:以概率 PDP_DPD 生成目标量测;同时在观测平面(矩形区域)内按泊松强度 λc\lambda_cλc 叠加均匀杂波 。因此每帧的量测集合可写为
Zk=(0或1个目标量测)∪Poisson(λc) 个杂波. \mathcal{Z}_k={\text{(0或1个目标量测)}}\cup{\text{Poisson}(\lambda_c)\ \text{个杂波}}. Zk=(0或1个目标量测)∪Poisson(λc) 个杂波.
2. 过程噪声离散化(DWNA)
对每个轴采用加速度白噪声 σa2\sigma_a^2σa2,连续到离散得到(常见近似):
-
一维等效噪声输入向量
Gx=12T2T00,Gy=0012T2T. \mathbf{G}_x= \begin{bmatrix} \tfrac{1}{2}T^2\\ T\\ 0\\ 0 \end{bmatrix},\qquad \mathbf{G}_y= \begin{bmatrix} 0\\ 0\\ \tfrac{1}{2}T^2\\ T \end{bmatrix}. Gx= 21T2T00 ,Gy= 0021T2T . -
离散协方差按
Q=σa2(GxGx⊤+GyGy⊤). \mathbf{Q}=\sigma_a^2\bigl(\mathbf{G}_x\mathbf{G}_x^{\top}+\mathbf{G}_y\mathbf{G}_y^{\top}\bigr). Q=σa2(GxGx⊤+GyGy⊤). -
量测噪声协方差:R=σr2I2\mathbf{R}=\sigma_r^2\mathbf{I}_2R=σr2I2。
调参直觉 :σa\sigma_aσa 越大,滤波器越"跟随量测";σr\sigma_rσr 越大,滤波器越"相信预测"。两者比值决定响应与平滑性的折中。
3. 卡尔曼滤波全流程(线性高斯情形)
3.1 预测(Time Update)
x^k∣k−1=Fx^k−1∣k−1, Pk∣k−1=FPk−1∣k−1F⊤+Q. \begin{aligned} \hat{\mathbf{x}}{k|k-1}&=\mathbf{F}\hat{\mathbf{x}}{k-1|k-1},\ \mathbf{P}{k|k-1}&=\mathbf{F}\mathbf{P}{k-1|k-1}\mathbf{F}^\top+\mathbf{Q}. \end{aligned} x^k∣k−1=Fx^k−1∣k−1, Pk∣k−1=FPk−1∣k−1F⊤+Q.
3.2 门限与数据关联(Measurement Gating & NN)
给定预测到量测域的创新协方差
Sk=HPk∣k−1H⊤+R, \mathbf{S}k=\mathbf{H}\mathbf{P}{k|k-1}\mathbf{H}^\top+\mathbf{R}, Sk=HPk∣k−1H⊤+R,
对每个候选量测 z∈Zk\mathbf{z}\in\mathcal{Z}kz∈Zk 计算马氏距离 :
d2(z)=(z−Hx^k∣k−1)⊤Sk−1(z−Hx^k∣k−1). d^2(\mathbf{z})=\bigl(\mathbf{z}-\mathbf{H}\hat{\mathbf{x}}{k|k-1}\bigr)^\top \mathbf{S}k^{-1} \bigl(\mathbf{z}-\mathbf{H}\hat{\mathbf{x}}{k|k-1}\bigr). d2(z)=(z−Hx^k∣k−1)⊤Sk−1(z−Hx^k∣k−1).
采用 χ2\chi^2χ2 门限(自由度为量测维度 m=2m=2m=2):
d2(z)≤γ,γ=χm2(p), p≈0.997 (约 3σ). d^2(\mathbf{z}) \le \gamma,\qquad \gamma=\chi^2_{m}(p),\ p\approx0.997\ \text{(约 }3\sigma\text{)}. d2(z)≤γ,γ=χm2(p), p≈0.997 (约 3σ).
将通过门的量测中选择 最近邻(最小 d2d^2d2) 作为本帧关联结果;若无量测通过门,则执行" 仅预测 "(跳过更新)。
图中紫色椭圆 即 γ\gammaγ 对应的门限;中心为 Hx^k∣k−1\mathbf{H}\hat{\mathbf{x}}_{k|k-1}Hx^k∣k−1,形状由 Sk\mathbf{S}_kSk 决定。
3.3 更新(Measurement Update)
若找到关联量测 zk\mathbf{z}kzk,则
Kk=Pk∣k−1H⊤Sk−1, x^k∣k=x^k∣k−1+Kk(zk−Hx^k∣k−1), Pk∣k=(I−KkH)Pk∣k−1. \begin{aligned} \mathbf{K}k&=\mathbf{P}{k|k-1}\mathbf{H}^\top\mathbf{S}k^{-1},\ \hat{\mathbf{x}}{k|k}&=\hat{\mathbf{x}}{k|k-1}+\mathbf{K}k\bigl(\mathbf{z}k-\mathbf{H}\hat{\mathbf{x}}{k|k-1}\bigr),\ \mathbf{P}{k|k}&=(\mathbf{I}-\mathbf{K}k\mathbf{H})\mathbf{P}{k|k-1}. \end{aligned} Kk=Pk∣k−1H⊤Sk−1, x^k∣k=x^k∣k−1+Kk(zk−Hx^k∣k−1), Pk∣k=(I−KkH)Pk∣k−1.
若未关联 (漏检或全被判为杂波),则
x^k∣k=x^k∣k−1,Pk∣k=Pk∣k−1. \hat{\mathbf{x}}{k|k}=\hat{\mathbf{x}}{k|k-1},\qquad \mathbf{P}{k|k}=\mathbf{P}{k|k-1}. x^k∣k=x^k∣k−1,Pk∣k=Pk∣k−1.
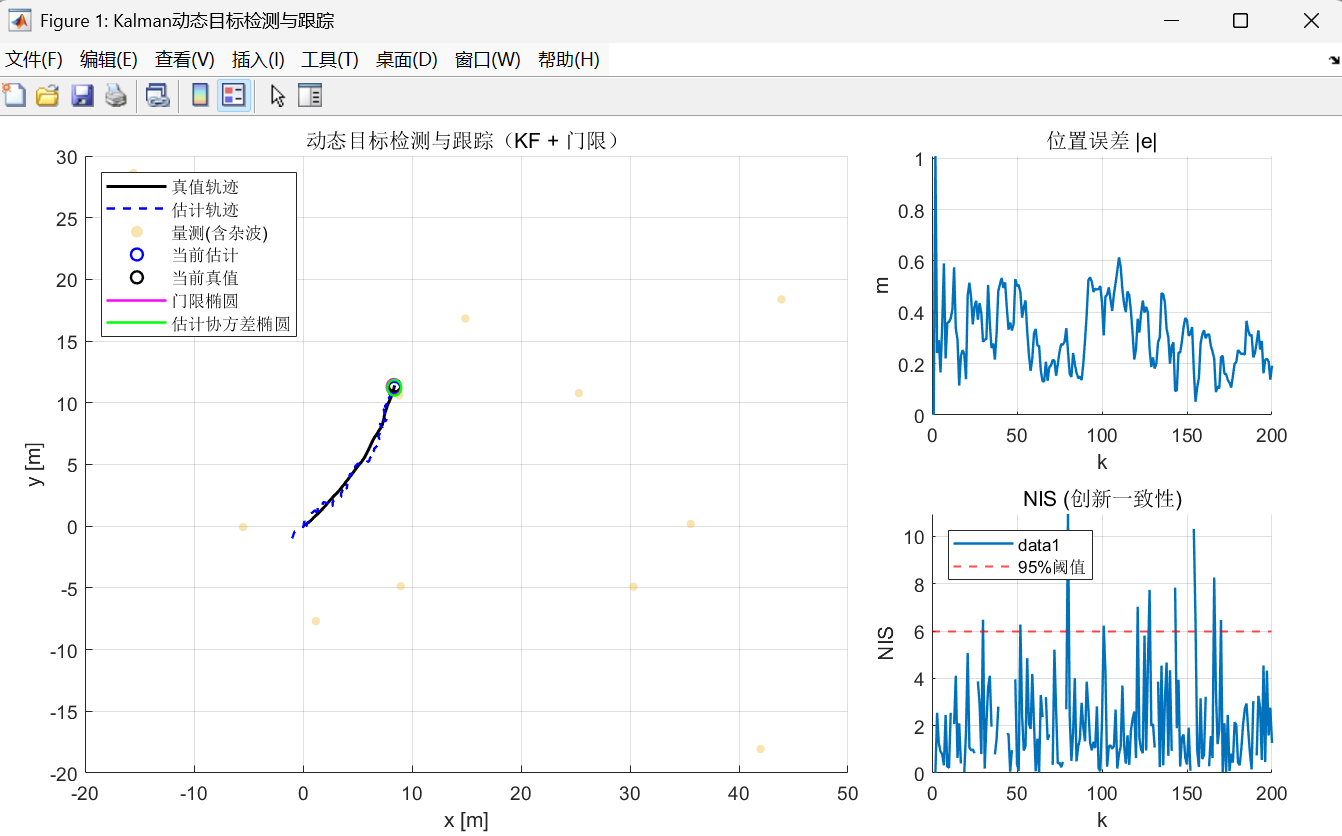
4. 结果与可视化
-
左侧主图:
-
黑实线 :真值轨迹;蓝虚线:估计轨迹;
-
紫色 :χ2\chi^2χ2 门限椭圆(观测域);绿色:后验位置协方差椭圆;
-
黄色圆点 :量测(含杂波);蓝/黑圆点:当前估计/真值。
-
-
右上:位置误差 ∣ek∣=∥p^k∣k−pk∥2|e_k|=\lVert \hat{\mathbf{p}}_{k|k}-\mathbf{p}_k\rVert_2∣ek∣=∥p^k∣k−pk∥2。
-
右下:NIS 曲线与 9595%95 阈值线。
4.1 NIS(创新一致性)定义与意义
若量测被采用,创新为
vk=zk−Hx^k∣k−1,vk∼N(0,,Sk). \mathbf{v}_k=\mathbf{z}k-\mathbf{H}\hat{\mathbf{x}}{k|k-1},\qquad \mathbf{v}_k\sim\mathcal{N}(\mathbf{0},,\mathbf{S}_k). vk=zk−Hx^k∣k−1,vk∼N(0,,Sk).
定义归一化创新平方
NISk=vk⊤Sk−1vk, \text{NIS}_k=\mathbf{v}_k^\top\mathbf{S}_k^{-1}\mathbf{v}_k, NISk=vk⊤Sk−1vk,
其在理想假设下服从 χm2\chi^2_mχm2。统计 NISk\text{NIS}_kNISk 的均值/分布,可用于检查噪声标定与滤波一致性。
5. 实验配置与核心参数
-
采样周期:T=0.1,sT=0.1,\text{s}T=0.1,s;帧数 K=200K=200K=200
-
过程噪声:σa=0.3,m/s2\sigma_a=0.3,\mathrm{m/s^2}σa=0.3,m/s2(DWNA)
-
量测噪声:σr=0.7,m\sigma_r=0.7,\mathrm{m}σr=0.7,m
-
探测概率:PD=0.9P_D=0.9PD=0.9;杂波强度:λc=6\lambda_c=6λc=6/帧
-
门限:γ=χ22(0.997)\gamma=\chi^2_2(0.997)γ=χ22(0.997)(约 3σ3\sigma3σ 椭圆)
-
初值:位置/速度有偏;协方差 P0P_0P0 较大
6. 结果表格
| 指标 | 数值 | 说明 |
|---|---|---|
| 位置 RMSE(m) | 0.342 | 位置估计的均方根误差;对全部帧的二维位置误差取平方、求平均后再开平方得到的总体精度指标。 |
| NIS 均值 | 2.064 | 创新一致性指标(NIS)的平均值;理论期望等于量测维数 m=2,接近 2 表明模型与噪声标定较为一致。 |
7. 算法总结
text
Initialize x̂0, P0
for k = 1..K:
# 预测
x̂− = F x̂
P− = F P Fᵀ + Q
# 门限(观测域)
S = H P− Hᵀ + R
γ = χ²_m(p) # p≈0.997
Zk = measurements at frame k
Zgate = { z ∈ Zk | (z - H x̂−)ᵀ S⁻¹ (z - H x̂−) ≤ γ }
if Zgate ≠ ∅:
z* = argmin_z d²(z) # 最近邻
Kk = P− Hᵀ S⁻¹
x̂ = x̂− + Kk (z* - H x̂−)
P = (I - Kk H) P−
NIS_k = (z* - H x̂−)ᵀ S⁻¹ (z* - H x̂−)
else:
x̂ = x̂−; P = P− # 漏检/未关联
end8. 工程要点与排错清单
-
门限太紧 易导致长期不更新(NIS 常为 NaN),轨迹发散;适当增大 ppp 或减小 σr\sigma_rσr。
-
噪声不匹配 :NIS 均值明显大于 mmm ⇒ 过程噪声偏小/量测噪声偏小;明显小于 mmm ⇒ 过程噪声偏大/量测噪声偏大。
-
杂波密集时,NN 关联可能误选;可升级为 JPDA、GNN 或 PHD/GLMB。
-
模型失配 (目标转弯/加速):用 CA/CT/IMM 或自适应 Q\mathbf{Q}Q。
-
数值稳定 :更新式可用 Joseph 形式保证协方差正定:
Pk∣k=(I−KH)Pk∣k−1(I−KH)⊤+KRK⊤. \mathbf{P}{k|k}=(\mathbf{I}-\mathbf{K}\mathbf{H})\mathbf{P}{k|k-1} (\mathbf{I}-\mathbf{K}\mathbf{H})^\top+\mathbf{K}\mathbf{R}\mathbf{K}^\top. Pk∣k=(I−KH)Pk∣k−1(I−KH)⊤+KRK⊤.
9. 小结
本文以线性高斯 KF + 马氏门限 + NN 关联 为主线,给出了从建模 → 噪声离散化 → 预测/更新 → 门限/关联 → 一致性检验 的完整流程,并在"杂波+漏检"场景下得到RMSE≈0.342 m、NIS≈2.064 的结果,验证了模型与参数的合理性。基于此框架,可进一步扩展到 多目标(出生/消亡/轨迹管理)、非线性量测(UKF/EKF)、机动目标(IMM/CT/CA) 等更复杂的工程场景。