本文主要为自用,会省略一些众所周知的细节。标定程序的安装可以参考下面我的步骤,vins_fusion暂时只复现了双目+IMU,可跳转至"双目相机标定"部分进行参考
一、安装imu_utils
1、安装absl
bash
git clone https://github.com/abseil/abseil-cpp
cd abseil-cpp
mkdir build && cd build
cmake -DCMAKE_INSTALL_PREFIX=/usr/local/absl .. # 指定安装路径
make -j8下面这步可能有问题,提示
cmake -DCMAKE_INSTALL_PREFIX=/usr/local/absl ...
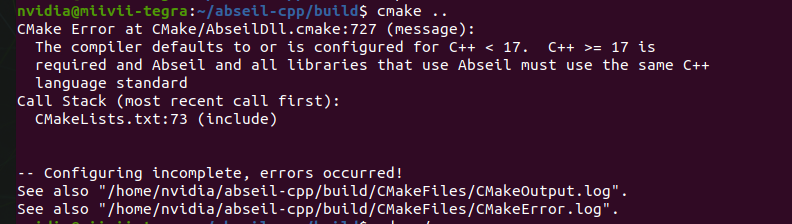 解决:在CMakeLists.txt加入
解决:在CMakeLists.txt加入
set(CMAKE_CXX_STANDARD 17)
加入后先把build文件夹中的内容清空,再cmake
也有不少博主采用如下方案解决,我这么处理会报错
其他解决方案
2、安装ceres
参考链接:解决方案
bash
#1. 下载ceres2.0版本
# 地址为 http://ceres-solver.org/ceres-solver-2.0.0.tar.gz
#2. 解压
#3. 进入目录,然后编译
cd ceres-solver
mkdir build && cd build
cmake ..
make -j3
sudo make install3、安装code_util
bash
git clone https://github.com/gaowenliang/code_utils.git
cd ..
catkin_make1、报backward.hpp错误
修改code_utils功能包下sumpixel_test.cpp中 #include "backward.hpp"为 #include <code_utils/backward.hpp>
2、elfutils/libdw.h 找不到
报错
/home/lzy/catkin_ws/src/code_utils/include/code_utils/backward.hpp:216:12: fatal error: elfutils/libdw.h: 没有那个文件或目录
216 | # include <elfutils/libdw.h>
 解决:
解决:
bash
sudo apt-get install libdw-dev3、报一堆错误
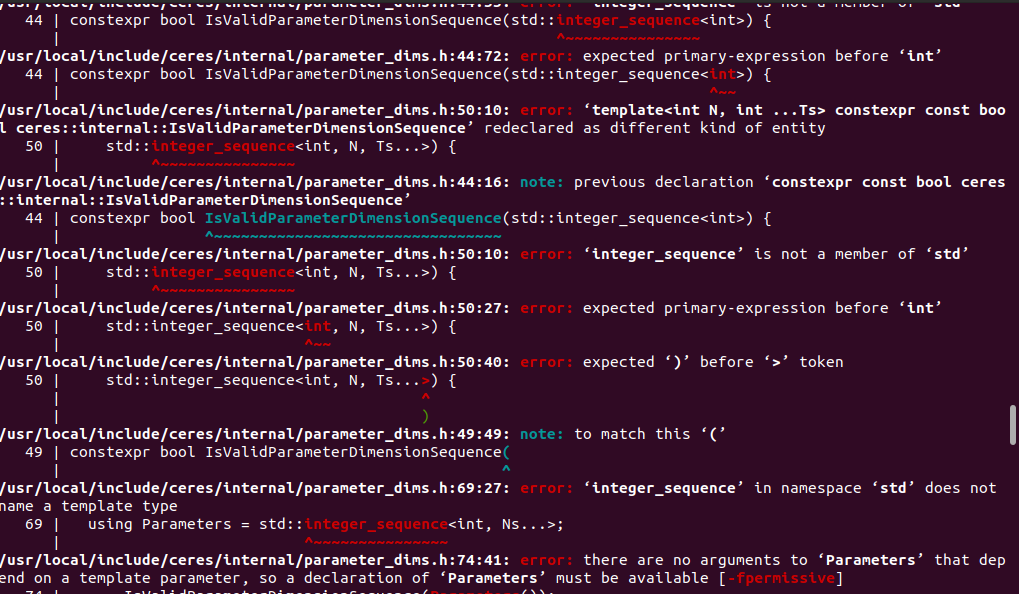
进入CMakeLists.txt中将
set(CMAKE_CXX_FLAGS "-std=c++11")
修改成:
set(CMAKE_CXX_FLAGS "-std=c++14")
4、CV方面报错
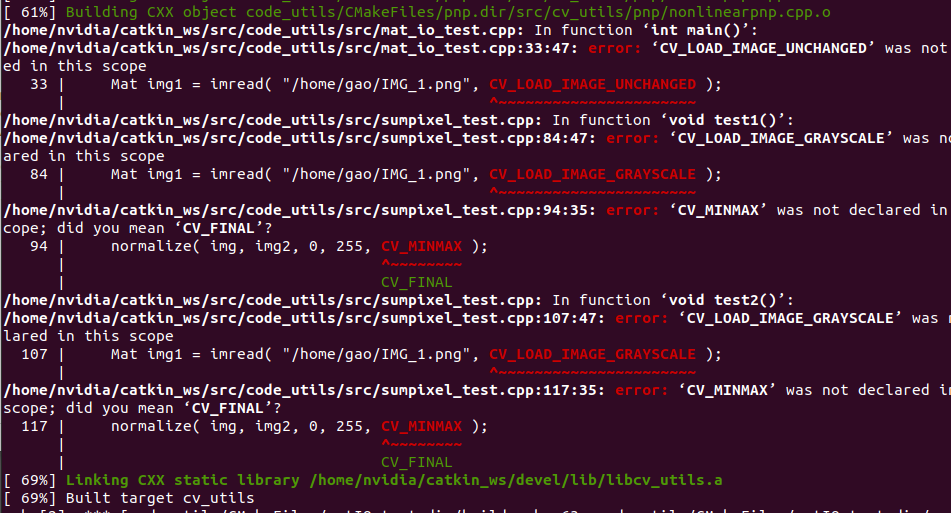 CV_MINMAX修改为NORM_MINMAX
CV_MINMAX修改为NORM_MINMAX
CV_LOAD_IMAGE_GRAYSCALE改为IMREAD_GRAYSCALE
CV_LOAD_IMAGE_UNCHANGED改为IMREAD_UNCHANGED
参考链接:参考
4、安装imu_utils
bash
git clone https://github.com/gaowenliang/imu_utils.git
cd ..
catkin_make1、报错一堆,同code_utils一样
进入CMakeLists.txt中将
set(CMAKE_CXX_FLAGS "-std=c++11")
修改成:
set(CMAKE_CXX_FLAGS "-std=c++14")
2、报错如下
/home/nvidia/catkin_ws/src/imu_utils/src/imu_an.cpp: In function 'void writeData1(std::string, const std::vector&, const std::vector&)':
/home/nvidia/catkin_ws/src/imu_utils/src/imu_an.cpp:68:19: error: aggregate 'std::ofstream out_t' has incomplete type and cannot be defined
68 | std::ofstream out_t;
| ^~~~~
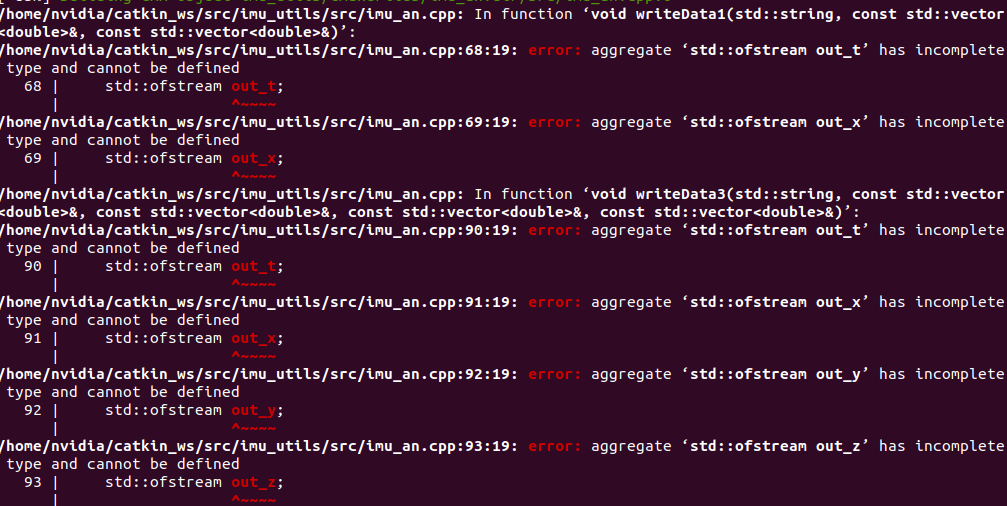
解决:在imu_an.cpp中加入
bash
#include <fstream>5、imu_utils标定流程
二、相机标定
1、Kalibr安装
官方安装:https://github.com/ethz-asl/kalibr/wiki/installation
采用源码方式安装,
报错:
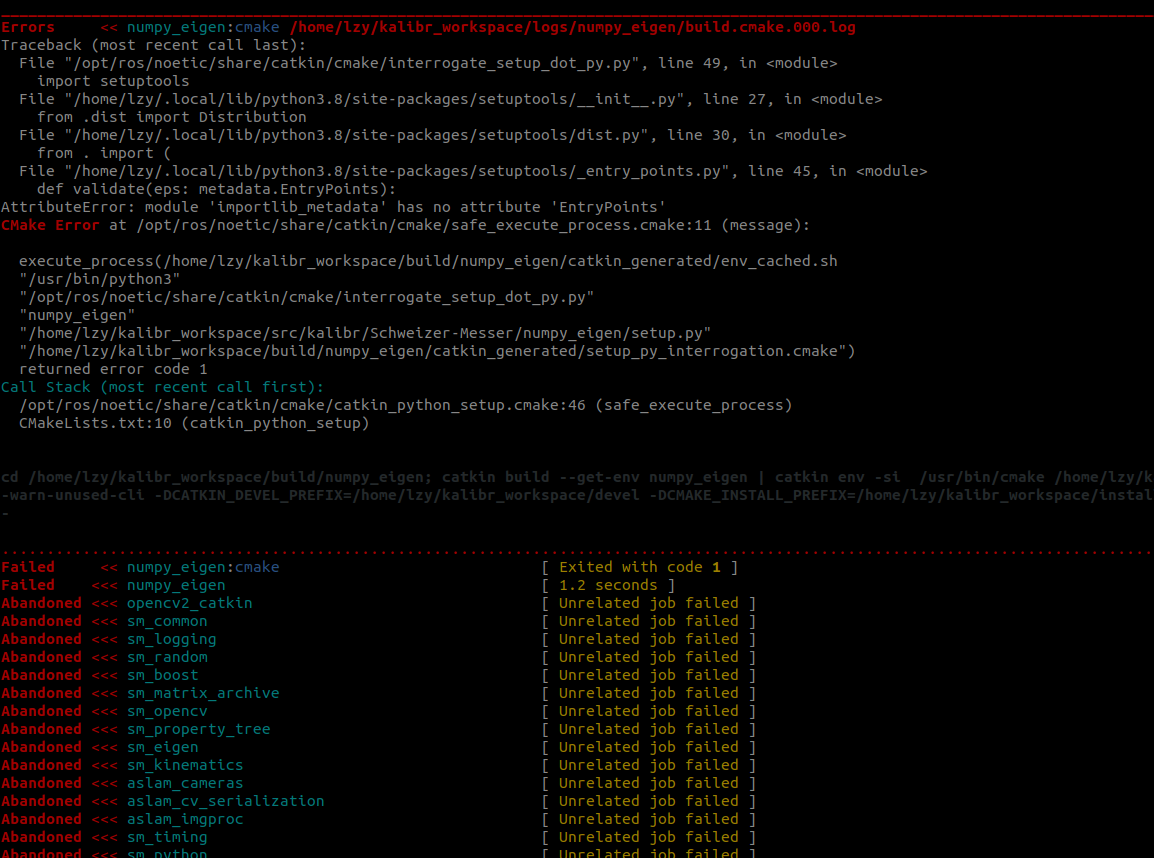
解决:
bash
pip install --upgrade importlib_metadata生成棋盘
rosrun kalibr kalibr_create_target_pdf --type checkerboard --nx 5 --ny 8 --csx 0.045 --csy 0.045
运行单目标定
rosrun camera_calibration cameracalibrator.py --size 5x8 --square 0.045 image:=/camera/color/image_raw
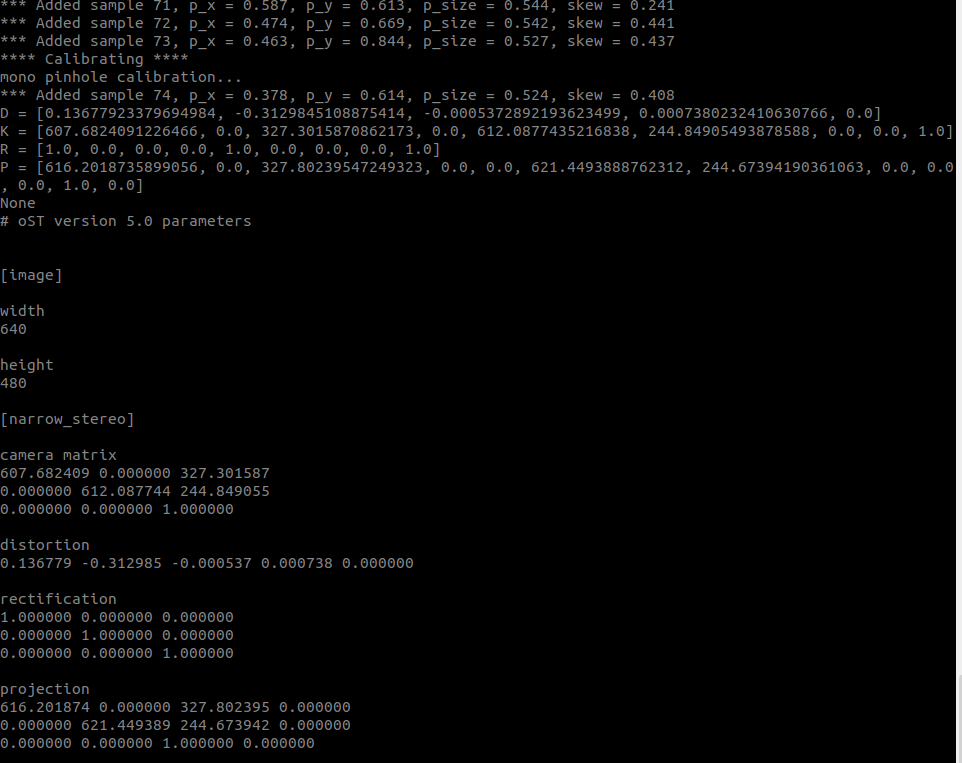
标定结果
bashimage_width:
image_height: 480
camera_name: narrow_stereo
camera_matrix:
rows: 3
cols: 3
data: [613.56325, 0. , 327.91613,
0. , 614.50013, 241.53748,
0. , 0. , 1. ]
# fx = 613.56325: x轴焦距(像素单位)
# fy = 614.50013: y轴焦距(像素单位)
# cx = 327.91613: 主点x坐标(光学中心)
# cy = 241.53748: 主点y坐标(光学中心)
distortion_model: plumb_bob
#畸变系数
distortion_coefficients:
rows: 1
cols: 5
data: [0.129330, -0.259850, 0.000048, 0.001920, 0.000000]
# k1 = 0.129330: 径向畸变系数1
# k2 = -0.259850: 径向畸变系数2
# p1 = 0.000048: 切向畸变系数1
# p2 = 0.001920: 切向畸变系数2
# k3 = 0.000000: 径向畸变系数3
rectification_matrix:
rows: 3
cols: 3
data: [1., 0., 0.,
0., 1., 0.,
0., 0., 1.]
# 投影矩阵
projection_matrix:
rows: 3
cols: 4
data: [623.26678, 0. , 328.88422, 0. ,
0. , 625.06627, 241.5653 , 0. ,
0. , 0. , 1. , 0. ]单目相机和IMU联合标定
生成棋盘
rosrun kalibr kalibr_create_target_pdf --type apriltag --nx 6 --ny 6 --tsize 0.022 --tspace 0.3
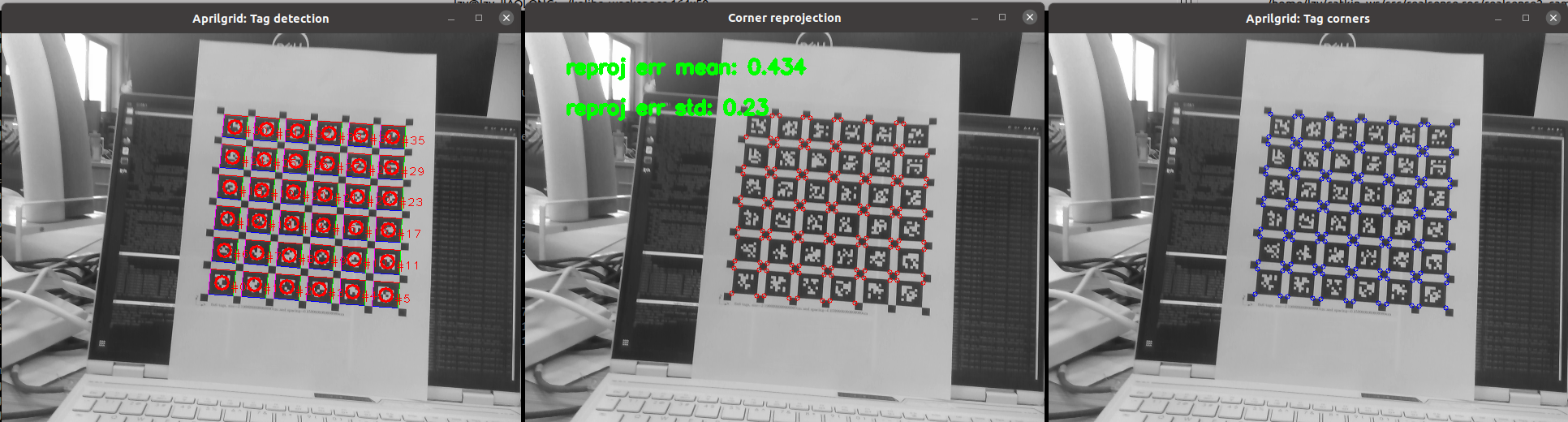
标定
rosrun kalibr kalibr_calibrate_imu_camera --target checkerboard.yaml --cam camchain.yaml --imu imu.yaml --bag d435i.bag --bag-from-to 5 45 --show-extraction
标定时的图像
双目相机标定
为了复现VINS_Fusion,标定时需要使用pinhole-radtan模型进行标定,我一开始使用pinhole-equi,导致误差大了一个量级,在运行双目VINS_Fusion时会出现极快速度的"瞬移",都不能称之为漂移了。
1、生成标定板,可以参考上方生成棋盘标定板的指令。这里我用实验室现成的标定板

新建new_checkboard.yaml文件,根据生成棋盘格子情况设置,0.08单位为米,表示一个格子的宽度
bash
target_type: 'checkerboard' #gridtype
targetCols: 11 #number of apriltags
targetRows: 10 #number of apriltags
colSpacingMeters: 0.08
rowSpacingMeters: 0.082、录制包含双目相机话题的bag包
bash
rosbag record -o stere_calibr.bag /camera/infra1/image_rect_raw /camera/infra2/image_rect_raw /camera/imu我这里录制出来包名为stere_calibr_2025-10-03-16-12-13.bag
3、开始标定,注意 --models 是pinhole-equi ,后面--bag-from-to 5 130是包的秒数么?我觉得可以缩短一些,如5 45。
bash
rosrun kalibr kalibr_calibrate_cameras --target new_checkboard.yaml --bag stere_calibr_2025-10-03-16-12-13.bag --models pinhole-equi pinhole-equi --topics /camera/infra1/image_rect_raw /camera/infra2/image_rect_raw --show-extraction --approx-sync 0.03 --bag-from-to 5 130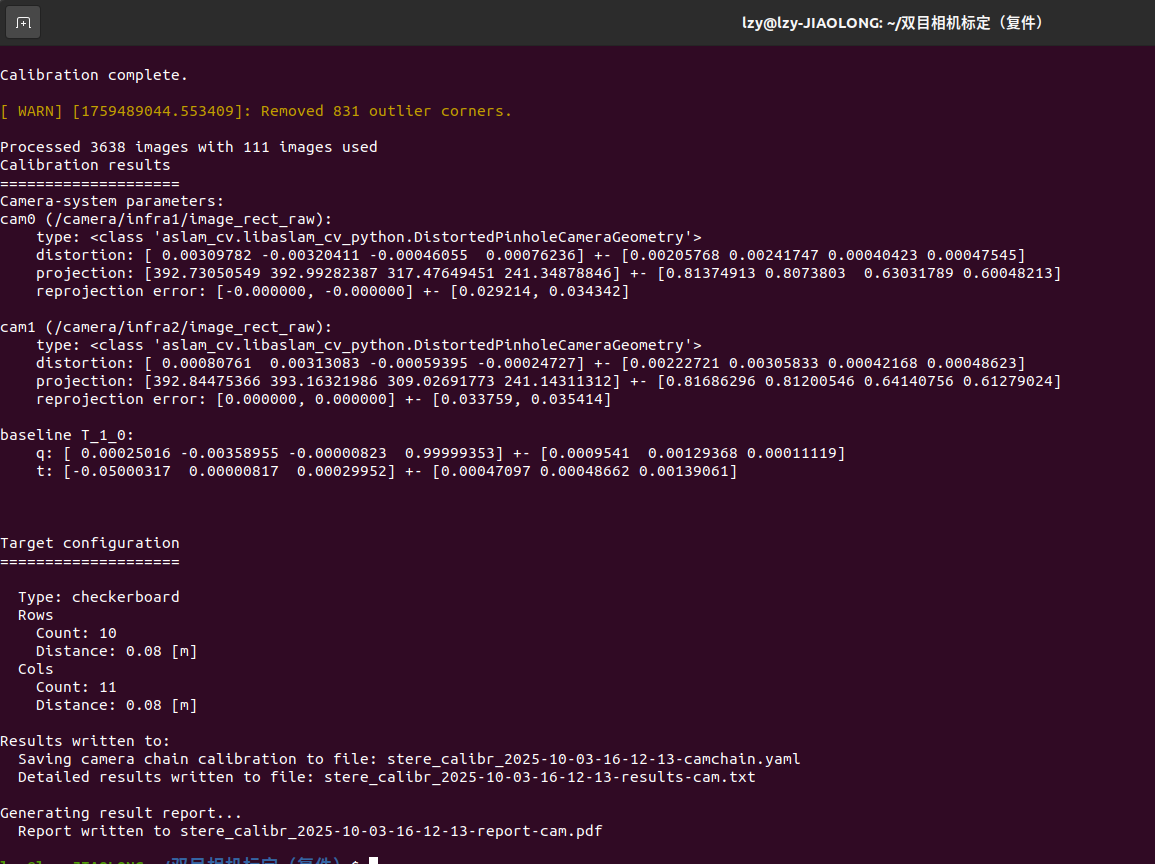 标定结束出来三个文件
标定结束出来三个文件
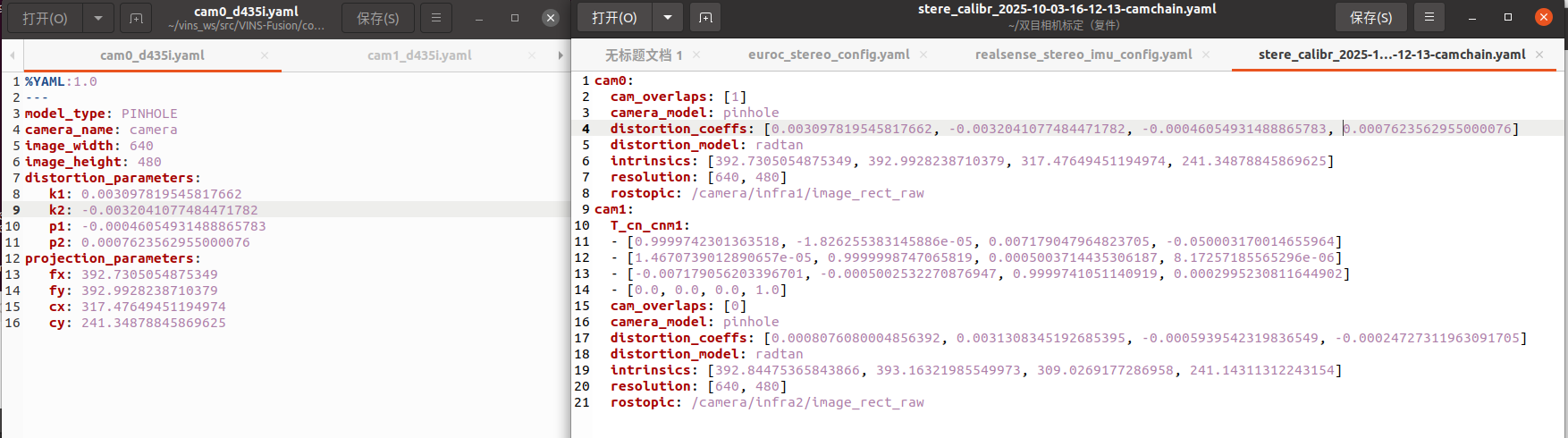
 根据标定结果(右)配置两个双目相机的vins_fusion参数文件(左)
根据标定结果(右)配置两个双目相机的vins_fusion参数文件(左)
双目相机+IMU联合标定并运行vins_fusion
这一步要先完成上面双目相机标定
新建imu.yaml
bash
#Accelerometers
accelerometer_noise_density: 1.2594292202442568e-02 #Noise density (continuous-time)
accelerometer_random_walk: 4.0715325965827638e-04 #Bias random walk
#Gyroscopes
gyroscope_noise_density: 1.8405334687656174e-03 #Noise density (continuous-time)
gyroscope_random_walk: 2.7769948094869358e-05 #Bias random walk
rostopic: /camera/imu #the IMU ROS topic
update_rate: 200.0 #Hz (for discretization of the values above)新建camchain.yaml
bashcam0:
cam_overlaps: [1]
camera_model: pinhole
distortion_coeffs: [0.003097819545817662, -0.0032041077484471782, -0.00046054931488865783, 0.0007623562955000076]
distortion_model: radtan
intrinsics: [392.7305054875349, 392.9928238710379, 317.47649451194974, 241.34878845869625]
resolution: [640, 480]
rostopic: /camera/infra1/image_rect_raw
cam1:
T_cn_cnm1:
- [0.9999742301363518, -1.826255383145886e-05, 0.007179047964823705, -0.050003170014655964]
- [1.4670739012890657e-05, 0.9999998747065819, 0.0005003714435306187, 8.17257185565296e-06]
- [-0.007179056203396701, -0.0005002532270876947, 0.9999741051140919, 0.0002995230811644902]
- [0.0, 0.0, 0.0, 1.0]
cam_overlaps: [0]
camera_model: pinhole
distortion_coeffs: [0.0008076080004856392, 0.0031308345192685395, -0.0005939542319836549, -0.00024727311963091705]
distortion_model: radtan
intrinsics: [392.84475365843866, 393.16321985549973, 309.0269177286958, 241.14311312243154]
resolution: [640, 480]
rostopic: /camera/infra2/image_rect_raw新建new_checkboard.yaml
bash
target_type: 'checkerboard' #gridtype
targetCols: 11 #number of apriltags
targetRows: 10 #number of apriltags
colSpacingMeters: 0.08
rowSpacingMeters: 0.08运行标定
bash
rosrun kalibr kalibr_calibrate_imu_camera --bag stere_calibr_2025-10-03-16-12-13.bag --cam camchain.yaml --imu imu.yaml --target new_checkboard.yaml --bag-from-to 10 130 --show-extraction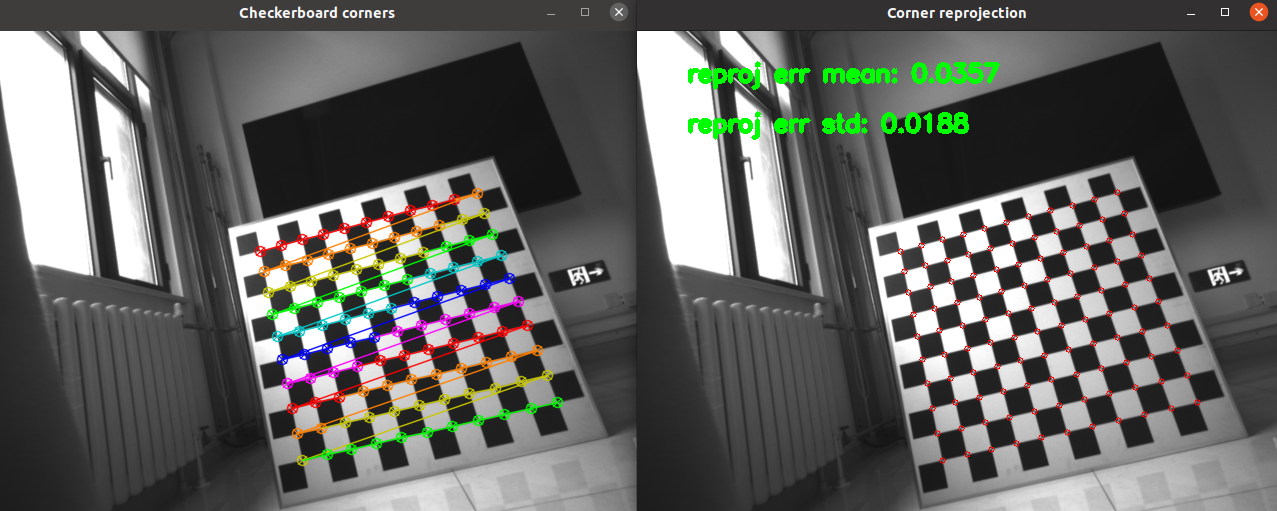
标定结果
bash
cam0:
T_cam_imu:
- [0.9999669967015586, -0.0070883530455097335, -0.0039699822123431434, 0.0045829622209191965]
- [0.0070734118936428, 0.9999678952515855, -0.003765011327503313, -0.0062613263130902675]
- [0.003996542486572694, 0.0037368057503125, 0.9999850318534456, -0.020593280097173598]
- [0.0, 0.0, 0.0, 1.0]
cam_overlaps: [1]
camera_model: pinhole
distortion_coeffs: [0.003097819545817662, -0.0032041077484471782, -0.00046054931488865783, 0.0007623562955000076]
distortion_model: radtan
intrinsics: [392.7305054875349, 392.9928238710379, 317.47649451194974, 241.34878845869625]
resolution: [640, 480]
rostopic: /camera/infra1/image_rect_raw
timeshift_cam_imu: 0.0012947445934955047
cam1:
T_cam_imu:
- [0.9999697898800448, -0.0070796056394183335, 0.0032091293600608494, -0.0455680516938101]
- [0.007090081017954129, 0.9999695357617046, -0.0032647051444475938, -0.006263390010578269]
- [-0.0031859187714276343, 0.003287359504473488, 0.9999895215396362, -0.020322992850038652]
- [0.0, 0.0, 0.0, 1.0]
T_cn_cnm1:
- [0.9999742301363538, -1.8262553831458863e-05, 0.007179047964823707, -0.050003170014655964]
- [1.4670739012890667e-05, 0.9999998747065839, 0.0005003714435306187, 8.17257185565296e-06]
- [-0.007179056203396703, -0.0005002532270876947, 0.9999741051140939, 0.0002995230811644902]
- [0.0, 0.0, 0.0, 1.0]
cam_overlaps: [0]
camera_model: pinhole
distortion_coeffs: [0.0008076080004856392, 0.0031308345192685395, -0.0005939542319836549, -0.00024727311963091705]
distortion_model: radtan
intrinsics: [392.84475365843866, 393.16321985549973, 309.0269177286958, 241.14311312243154]
resolution: [640, 480]
rostopic: /camera/infra2/image_rect_raw
timeshift_cam_imu: 0.001293837851146846运行VINS_fusion
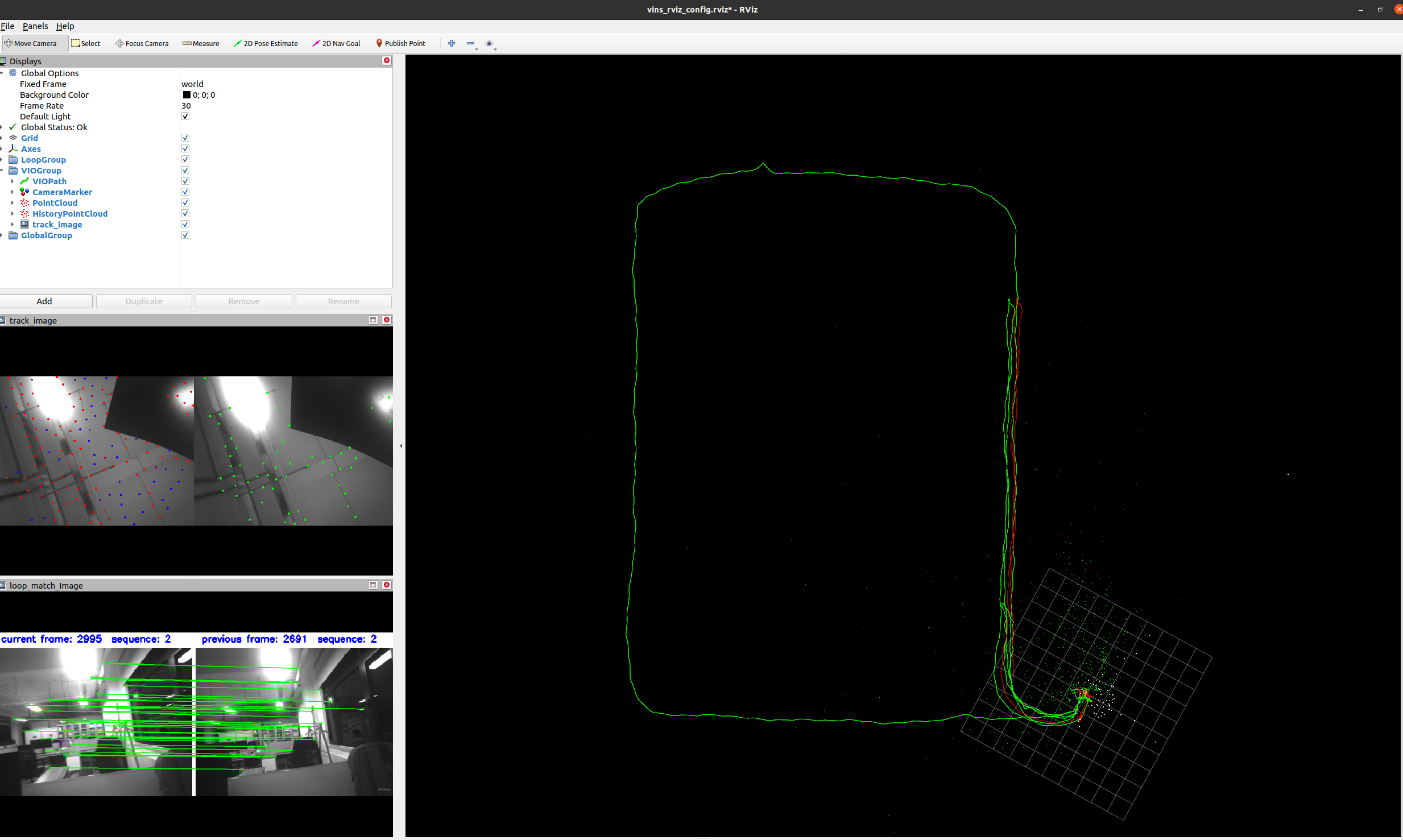 这是我的yaml文件,暂时还没把imu标定结果放上
这是我的yaml文件,暂时还没把imu标定结果放上
bash
%YAML:1.0
#common parameters
#support: 1 imu 1 cam; 1 imu 2 cam: 2 cam;
imu: 1
num_of_cam: 2
imu_topic: "/camera/imu"
image0_topic: "/camera/infra1/image_rect_raw"
image1_topic: "/camera/infra2/image_rect_raw"
output_path: "~/output/"
cam0_calib: "cam0_d435i.yaml"
cam1_calib: "cam1_d435i.yaml"
image_width: 640
image_height: 480
# Extrinsic parameter between IMU and Camera.
estimate_extrinsic: 1 # 0 Have an accurate extrinsic parameters. We will trust the following imu^R_cam, imu^T_cam, don't change it.
# 1 Have an initial guess about extrinsic parameters. We will optimize around your initial guess.
body_T_cam0: !!opencv-matrix
rows: 4
cols: 4
dt: d
# data: [0.9999883187624422, -5.930930785918539e-05, 0.00483309642633039, -0.05045129504417945,
# 5.82201817184673e-05, 0.9999999728828132, 0.00022548786948520963, -0.00012769957821977544,
# -0.004833109668799891, -0.00022520385175563642, 0.9999882950985729, 0.0003684415788260392,
# 0, 0, 0, 1]
data: [0.9999697898800448, -0.0070796056394183335, 0.0032091293600608494, -0.0455680516938101,
0.007090081017954129, 0.9999695357617046, -0.0032647051444475938, -0.006263390010578269,
-0.0031859187714276343, 0.003287359504473488, 0.9999895215396362, -0.020322992850038652,
0, 0, 0, 1]
body_T_cam1: !!opencv-matrix
rows: 4
cols: 4
dt: d
data: [0.9999669967015586, -0.0070883530455097335, -0.0039699822123431434, 0.0045829622209191965,
0.0070734118936428, 0.9999678952515855, -0.003765011327503313, -0.0062613263130902675,
0.003996542486572694, 0.0037368057503125, 0.9999850318534456, -0.020593280097173598,
0, 0, 0, 1]
#Multiple thread support
multiple_thread: 1
#feature traker paprameters
max_cnt: 150 # max feature number in feature tracking
min_dist: 30 # min distance between two features
freq: 10 # frequence (Hz) of publish tracking result. At least 10Hz for good estimation. If set 0, the frequence will be same as raw image
F_threshold: 1.0 # ransac threshold (pixel)
show_track: 1 # publish tracking image as topic
flow_back: 1 # perform forward and backward optical flow to improve feature tracking accuracy
#optimization parameters
max_solver_time: 0.04 # max solver itration time (ms), to guarantee real time
max_num_iterations: 8 # max solver itrations, to guarantee real time
keyframe_parallax: 10.0 # keyframe selection threshold (pixel)
#imu parameters The more accurate parameters you provide, the better performance
acc_n: 0.1 # accelerometer measurement noise standard deviation.
gyr_n: 0.01 # gyroscope measurement noise standard deviation.
acc_w: 0.001 # accelerometer bias random work noise standard deviation.
gyr_w: 0.0001 # gyroscope bias random work noise standard deviation.
g_norm: 9.81007 # gravity magnitude
#unsynchronization parameters
estimate_td: 0 # online estimate time offset between camera and imu
td: 0.0 # initial value of time offset. unit: s. readed image clock + td = real image clock (IMU clock)
#loop closure parameters
load_previous_pose_graph: 0 # load and reuse previous pose graph; load from 'pose_graph_save_path'
pose_graph_save_path: "~/output/pose_graph/" # save and load path
save_image: 1 # save image in pose graph for visualization prupose; you can close this function by setting 0