概念
WBC(Whole-Body Control,全身控制)是什么?机器人是由"各关节"组成的,其不是"各关节各玩各的"而是一个耦合的整体。在某个时刻可能要做很多事情,比如保持平衡(重心别出圈)、手/脚要动作到目标位置、躯干姿态不能乱、关节不能超限、脚下不能打滑。这些都是一系列任务的组合。
WBC的核心就是把这些任务(目标)和约束(物理/安全)写进一个小型优化问题,在每个控制周期(几百hz~1Khz)求解,得到**"当下这毫秒,各关节应该怎么动/用多大力"**。
一句话总结就是WBC就是用优化的方法求解出要给"关节多少力""以便让机器的各个关节一起配合完成多个目标,且不违反物理与安全约束。
原理
动力学方程
要解释WBC的原理,那必须绕不开动力学方程,这里就先对动力学方程做个简单介绍。
M(q)v˙+h(q,v)=STτ+JcTλ M(q)\dot{v} + h(q,v) = S^T \tau + J_c^T \lambda M(q)v˙+h(q,v)=STτ+JcTλ
配合接触约束:
Jcv=0,λ∈摩擦锥 J_c v = 0,\quad \lambda \in \text{摩擦锥} Jcv=0,λ∈摩擦锥
通俗理解公式就是:"惯性 × 加速度 + 自然出现的力 = 电机能给的力 + 地面/物体的反力"
公式左边:机器人自身的自然物理
- M(q)v˙M(q)\dot{v}M(q)v˙:惯性项。M(q)M(q)M(q)是质量矩阵,描述机器人在不同姿态下的惯性特性。\\dot{v} 是广义加速度(关节加速度或身体的加速度);其意义就像是广义加速度(关节加速度或身体的加速度);其意义就像是广义加速度(关节加速度或身体的加速度);其意义就像F=ma里面的里面的里面的ma,表示加速一个有惯性的物体需要的力
- h(q,v)h(q,v)h(q,v):重力+速度相关项(科氏力、离心力)。如果机器人静止,这里主要就是重力。如果在运动,这里就会出现"速度带来的额外力",类似开车转弯时身体被甩出去的感觉。
公式右边:外界能提供的"驱动力"
- STτS^T \tauSTτ:电机能施加的关节力矩。τ\tauτ电机产生的力矩(控制器的输出),STS^TST选择矩阵,把电机力矩映射到广义坐标系中。
- JcTλJ_c^T \lambdaJcTλ:接触点反力。λ\lambdaλ来自地面或物体的力(约束反作用力),JcJ_cJc接触点的雅可比,把关节速度映射到接触点速度。JcTλJ_c^T \lambdaJcTλ把"地面推脚的力"转换回"关节的力"。
直观记忆就是类比现实生活中的推车子:
- 你推车:电机力矩τ\tauτ。
- 地面支撑车子:接触反力λ\lambdaλ。
- 车子有质量,要加速就得克服惯性:M(q)v˙M(q)\dot{v}M(q)v˙。
- 重力和转弯的惯性: h(q,v)h(q,v)h(q,v)。
接触力约束
还要满足接触力约束Jcv=0,λ∈摩擦锥J_c v = 0,\quad \lambda \in \text{摩擦锥}Jcv=0,λ∈摩擦锥,其中Jcv=0J_c v = 0Jcv=0意义是接触点速度为0,比如机器人脚贴在地上不滑、不穿透;λ∈摩擦锥\quad \lambda \in \text{摩擦锥}λ∈摩擦锥意义是接触力必须满足摩擦模型,脚不会不穷大摩擦,力要在摩擦椎范围内。
公式中涉及到一个雅可比,什么是雅可比JcJcJc?
假设有一个机械臂:
- 关节角度:就像是控制的"按钮"。
- 手末端的位置:就是最终关心的"结果"。
那么问题就是关节角度动一动,末端的位置会怎么动了?这个"关节空间的微小变化"影响到"末端空间的微小变化"。这样一个映射关系,就是雅可比矩阵JJJ。
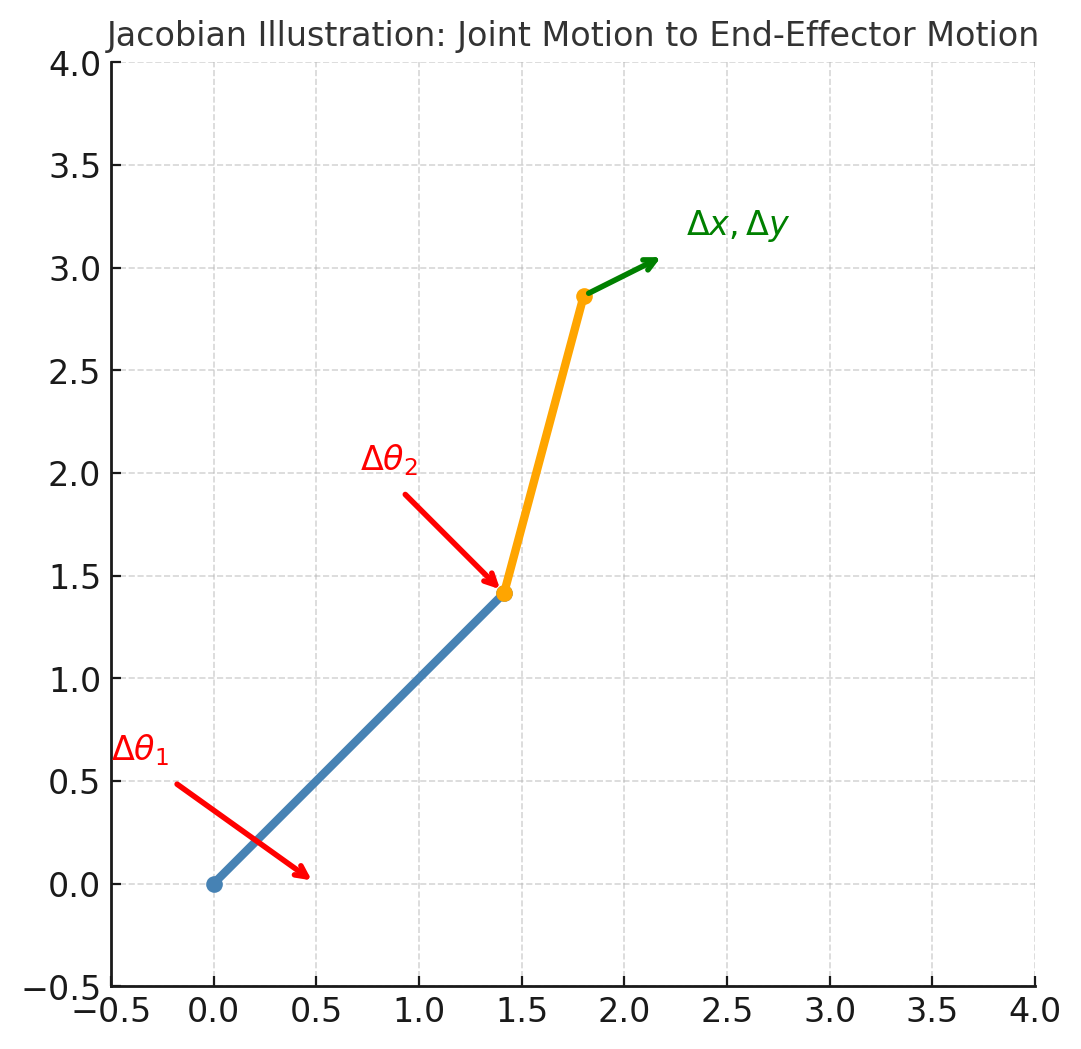
图中红色箭头表示关节角度的小变化Δθ1,Δθ2\Delta \theta_1 , \Delta \theta_2Δθ1,Δθ2。红色箭头的变换导致绿色箭头末端位置的变化:Δx,Δy\Delta x , \Delta yΔx,Δy。雅可比矩阵 JJJ 就是把
Δθ1Δθ2\]⟶\[ΔxΔy\] \\begin{bmatrix}\\Delta \\theta_1 \\\\ \\Delta \\theta_2\\end{bmatrix} \\longrightarrow \\begin{bmatrix}\\Delta x \\\\ \\Delta y\\end{bmatrix} \[Δθ1Δθ2\]⟶\[ΔxΔy
因此如果想要末端动多少就用JJJ,想算末端力传回关节多少就用JTJ^TJT。
总结一下雅可比JJJ就是关节空间和任务空间的桥梁,作用就是我们关节动多少,末端/接触点动多少。
动力学方程在WBC中的用处?
动力学方程是机器人身体运动的"牛顿定律",我们来看看WBC的目标是什么?WBC不只是让机器人"走"或"站",而是要全身协调,比如要去抓杯子,脚要保持不滑,躯干要保持平衡,关节力矩不能超过电机限制。所以WBC的本质是解一个优化问题 ,找出一组关节力矩τ\tauτ,既能完成任务目标,又满足动力学方程和约束。
优化问题
WBC的核心思路是把机器人全身的目标任务转化为优化问题,在满足物理规律和约束条件的前提下,求出最合适的一组关节力矩τ\tauτ。
具体一点在WBC中求解的决策变量通常是如下三个:
x=v˙τλ x = \begin{bmatrix} \dot{v} \\ \tau \\ \lambda \end{bmatrix} x= v˙τλ
- 最优的关节力矩τ\tauτ。
- 接触点反力λ\lambdaλ。
- 机器人下一步的加速度\\dot{v} 。
优化问题转换为数学的目标函数如下:
minx∥Jtaskv˙−v˙des∥2+∥τ∥2+∥λ∥2 \min_{x} \| J_{\text{task}} \dot{v} - \dot{v}_{\text{des}} \|^2 + \| \tau \|^2 + \| \lambda \|^2 xmin∥Jtaskv˙−v˙des∥2+∥τ∥2+∥λ∥2
公式中Jtaskv˙−v˙desJ_{\text{task}} \dot{v} - \dot{v}{\text{des}}Jtaskv˙−v˙des表示实际加速度与期望加速度的误差,Jtaskv˙J{\text{task}} \dot{v}Jtaskv˙是在当前关节加速度下,末端/任务空的实际加速度,而v˙des\dot{v}_{\text{des}}v˙des是我们期望任务空间实现的期望加速度(比如手往前加速 0.5 m/s²,质心保持 0 加速度)。
同时优化问题还要满足以下约束条件:
- 动力学约束:M(q)v˙+h(q,v)=STτ+JcTλM(q)\dot{v} + h(q,v) = S^T \tau + J_c^T \lambdaM(q)v˙+h(q,v)=STτ+JcTλ。这是硬约束,控制器必须遵守。
- 接触约束:Jcv=0J_c v = 0Jcv=0,接触点不能乱动(不滑、不穿透)。
- 摩擦约束:λ∈Kfric\lambda \in \mathcal{K}_{\text{fric}}λ∈Kfric,接触力必须符合摩擦模型(不能无限大)。
- 力矩限制:τmin≤τ≤τmax\tau_{\min} \leq \tau \leq \tau_{\max}τmin≤τ≤τmax。
总结一下优化问题的目标函数意思就是要满足任务误差最小化(手/身体/质心的加速度跟踪目标),同时要满足能量或力矩最小化(不能浪费力),同时满足接触力正则化(力要稳定不能乱跳)。
方程有了,怎么求解了?
这个目标函数是一个二次型,符合QP,所以可以用现成的QP求解器来解,例如:OSQP、qpOASES、Gurobi(商业求解器)、CPLEX(商业求解器)、CVXPy(Python 封装,常用于原型),这里就不过多阐述了。
总结一下WBC核心就是要解决一个优化问题:二次目标(误差最小 + 力矩正则) + 动力学/接触/摩擦/限幅约束。其求解的方式通常使用QP 求解器(实时、高效、全局最优)。求解的结果是关节力矩τ\tauτ(给电机执行),同时还得到加速度v˙\dot{v}v˙和接触力λ\lambdaλ。
示例
接下来我们调用cvxpy库看看示例,直观体验一下。
python
import cvxpy as cp
import numpy as np
# ---- 机械臂参数 ----
l1, l2 = 1.0, 1.0
m1, m2 = 1.0, 1.0
theta1, theta2 = np.deg2rad(45), np.deg2rad(30)
# ---- 雅可比(末端位置对关节的导数)----
J_task = np.array([
[-l1*np.sin(theta1) - l2*np.sin(theta1+theta2), -l2*np.sin(theta1+theta2)],
[ l1*np.cos(theta1) + l2*np.cos(theta1+theta2), l2*np.cos(theta1+theta2)]
])
# ---- 动力学质量矩阵 M(简化版)----
M = np.array([
[m1*l1**2 + m2*(l1**2 + l2**2 + 2*l1*l2*np.cos(theta2)), m2*(l2**2 + l1*l2*np.cos(theta2))],
[m2*(l2**2 + l1*l2*np.cos(theta2)), m2*l2**2]
])
h = np.zeros(2) # 忽略重力/科氏项
# ---- 接触约束:假设末端y方向不能动(竖直方向约束)----
Jc = np.array([[0, 1]]) @ J_task # 取末端y方向的行
# ---- 变量 ----
ddq = cp.Variable(2) # 关节加速度
tau = cp.Variable(2) # 力矩
lam = cp.Variable(1) # 接触力 (竖直反作用力)
# ---- 期望任务加速度(末端x方向=1.0, y方向=0.0)----
xddot_des = np.array([1.0, 0.0])
# ---- 目标函数:末端任务 + 力矩/接触力正则 ----
objective = cp.Minimize(
cp.sum_squares(J_task @ ddq - xddot_des) +
0.01*cp.sum_squares(tau) +
0.01*cp.sum_squares(lam)
)
# ---- 约束 ----
constraints = [
M @ ddq + h == tau + Jc.T @ lam, # 动力学方程
Jc @ ddq == 0, # 接触点不加速
tau >= -10, tau <= 10,
lam >= 0 # 接触力必须向上推
]
# ---- 求解 ----
prob = cp.Problem(objective, constraints)
prob.solve()
print("Optimal joint accelerations:", ddq.value)
print("Optimal torques:", tau.value)
print("Optimal contact force λ:", lam.value)
print("End-effector acc achieved:", J_task @ ddq.value)
print("Desired end-effector acc :", xddot_des)上面的示例中可以分为几部分:
(1)任务
末端(手)在水平 xxx 方向产生 1.0m/s21.0 \text{m/s}^21.0m/s2 的加速度。在垂直 yyy 方向不要加速(因为手撑在桌子上,不应该离开桌面)。
数学写法:
x¨des=1.0,0.0T \ddot{x}_{des} = 1.0,0.0^T x¨des=1.0,0.0T
(2)决策变量
优化器要决定的量是
q¨=θ¨1,θ¨2T,τ=τ1,τ2T,λ \ddot{q} = \\ddot{\\theta}_1,\\ddot{\\theta}_2^T, \quad \tau = \\tau_1,\\tau_2^T, \quad \lambda q¨=θ¨1,θ¨2T,τ=τ1,τ2T,λ
(3)要优化的目标函数
最小化
minq¨, τ, λ∥Jtaskq¨−x¨des∥2+0.01∥τ∥2+0.01∥λ∥2 \min_{\ddot{q},\;\tau,\;\lambda}\| J_{\text{task}} \ddot{q} - \ddot{x}_{des} \|^2+ 0.01 \|\tau\|^2+ 0.01 \|\lambda\|^2 q¨,τ,λmin∥Jtaskq¨−x¨des∥2+0.01∥τ∥2+0.01∥λ∥2
(4)约束条件
- 动力学约束:M(q)q¨+h(q,q˙)=τ+JcTλM(q)\ddot{q} + h(q,\dot{q}) = \tau + J_c^T \lambdaM(q)q¨+h(q,q˙)=τ+JcTλ
- 接触约束:Jcq¨=0J_c \ddot{q} = 0Jcq¨=0
- 力矩范围:−10≤τi≤10-10 \leq \tau_i \leq 10−10≤τi≤10
- 接触力非负:λ≥0\lambda \geq 0λ≥0
(5)输出结果
最后调用
python
prob = cp.Problem(objective, constraints)
prob.solve()求解得出结果:
python
Optimal joint accelerations: [ 0.50615867 -1.88900987]
Optimal torques: [-1.12977187 -0.94450493]
Optimal contact force λ: [1.29515155e-23]
End-effector acc achieved: [ 9.77823461e-01 -5.00938335e-17]
Desired end-effector acc : [1. 0.]QP 解出来的就是
- 最优关节加速度:q¨\ddot{q}q¨
- 最优关节力矩:τ\tauτ
- 接触反力:λ\lambdaλ
- 实际末端加速度:x¨=Jtaskq¨\ddot{x} = J_{\text{task}} \ddot{q}x¨=Jtaskq¨
并与期望值 x¨des\ddot{x}_{des}x¨des 对比。
上面的代码中只截取了关键部分,下面是绘制图像的效果如下,可以直观体会看看:
WBC与MPC
上一篇文章我们分析了MPC,那么MPC与WBC什么关系了?
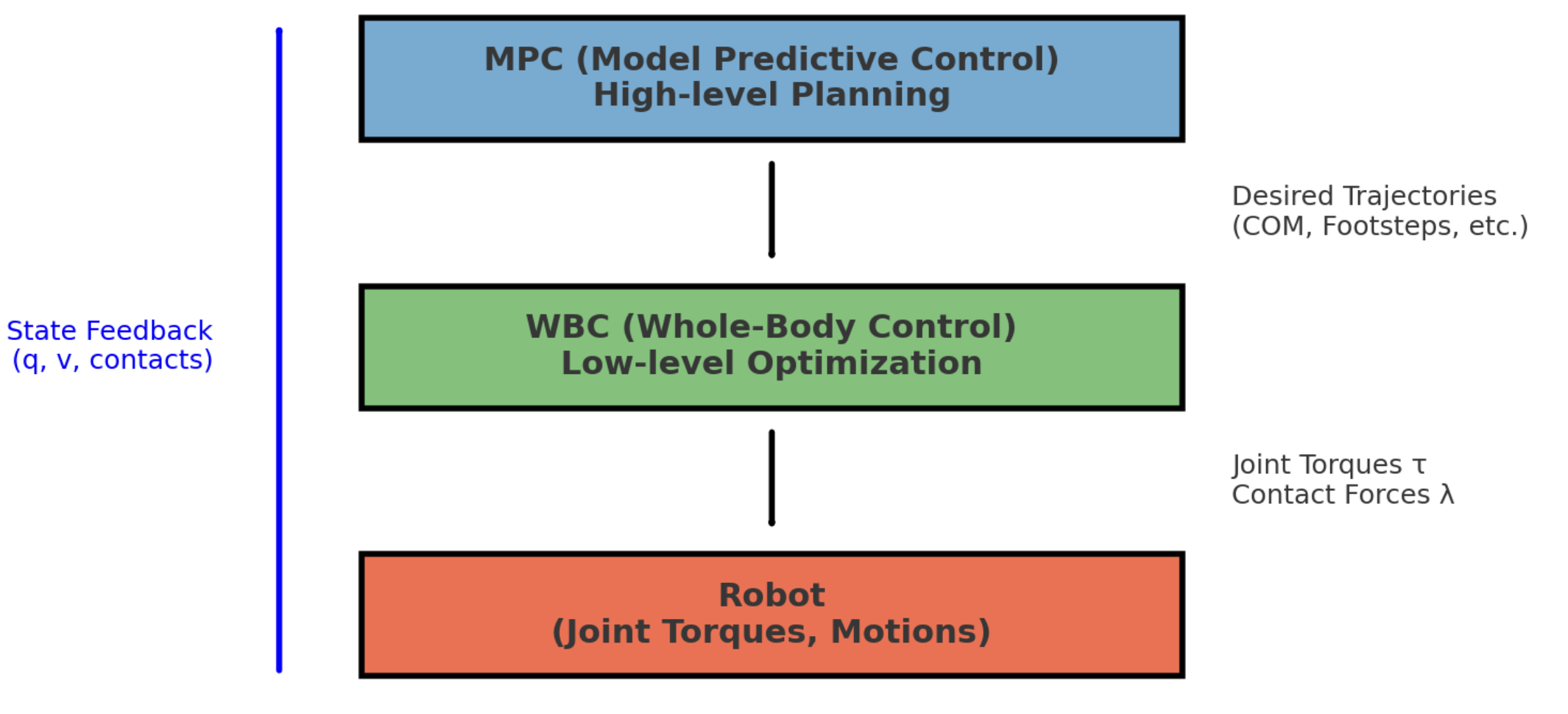
MPC在WBC之上,MPC作为决策层做"未来几步的规划",比如预测未来1S内,质心应该怎么移动,脚该放哪里,其输出的是期望的任务轨迹。WBC是在下层,拿到MPC给的任务(目标加速度/姿态/接触序列)在动力学和接触约束下,求解QP得到当下这一瞬间的关节力矩τ\tauτ。简而言之MPC决定"机器人未来要往哪走",WBC决定"当前每个关节该怎么出力"。
举个例子:双足机器人走路
- MPC:优化未来 1 秒的 质心轨迹、摆腿位置、支撑相切换。输出:期望的 x¨des\ddot{x}_{des}x¨des(质心加速度)、脚的落点计划。
- WBC:把这些期望当作任务输入,解 QP ,输出关节力矩 τ\tauτ,同时计算接触力 λ\lambdaλ,保证机器人在每一步不摔倒。