海思SS626开发笔记之环境搭建和SDK编译
文章目录
- 海思SS626开发笔记之环境搭建和SDK编译
- 前言
- 一、全部编译:
- 二、单独编译uboot:
- [三、 单独编译内核:](#三、 单独编译内核:)
- [四、 编译busybox:](#四、 编译busybox:)
- 总结
前言
SS626/Hi3536AV100/GK7618是同一个芯片,针对多路高清/超高清(1080p/4M/5M/4K)智能NVR产品应用开发的新一代专业高端SoC芯片。Hi3536AV100集成了ARM Cortex-A55八核处理器和性能强大的神经网络处理器,支持多种智能算法应用。Hi3536AV100支持32路1080p多协议解码及4路1080p H.265/H.264编码,还支持双HDMI 4K显示能力及鱼眼矫正、动态对比度增强等多种图像处理功能。同时,Hi3536AV100还支持完整的安全解决方案,结合丰富的外围设备及高速接口,该SoC芯片为客户产品提供了高性能、安全、高集成度、易于开发的嵌入式高清智能NVR解决方案。
一、全部编译:
解压SDK,并且安装后,再开始编译。
GK7618V100_V1.0.0.3\GK7618V100_V1.0.0.3_Documents\03_software\board
参考《SS626V100 SDK 安装以及升级使用说明.pdf》
本目录下的编译脚本支持选用aarch64-mix410-linux 64bit工具链进行编译,具体命令如下:
(1)编译整个osdrv目录:(同时会做打补丁的操作,后面就不用单独打补丁了)
make all
默认编译:
make BOOT_MEDIA=spi CHIP=ss626v100 all
也可以选择emmc的启动介质:
make BOOT_MEDIA=emmc CHIP=ss626v100 all
参数说明:
BOOT_MEDIA:spi nor或spi nand启动选择spi;emmc启动选择emmc。
二、单独编译uboot:
参考:《SSxxxV100 U-boot 移植应用开发指南.pdf》
1.编译镜像文件:
SPI NOR/NAND 启动的:
cp configs/ss626v100_defconfig .config
或者:make ARCH=arm CROSS_COMPILE=aarch64-mix410-linux- ss626v100_defconfig
EMMC启动的:
cp configs/ss626v100_emmc_defconfig .config
或者:make ARCH=arm CROSS_COMPILE=aarch64-mix410-linux- ss626v100_emmc_defconfig
配置菜单:
make ARCH=arm CROSS_COMPILE=aarch64-mix410-linux- menuconfig
编译:
make ARCH=arm CROSS_COMPILE=aarch64-mix410-linux- -j4
reg_bin生成工具:
SS626V100_SDK_V2.0.0.3/osdrv/tools/pc/uboot_tools/regbin-v1.0.2/
对EMMC启动的:
./regbin .../SS626V100-DMEB_4L_FLYBY-DDR4_3200M_4GB_16bitx4-A55_1600M-EMMC.xlsm ss626v100_reg_info_emmc
对SPI FLASH启动的:
./regbin .../SS626V100-DMEB_4L_FLYBY-DDR4_3200M_4GB_16bitx4-A55_1600M.xlsm ss626v100_reg_info_spi
cp osdrv/tools/pc/uboot_tools/reg_info.bin .reg
生成最终的uboot:
make ARCH=arm CROSS_COMPILE=aarch64-mix410-linux- u-boot-z.bin

open_source/u-boot/u-boot-2020.01下生成的u-boot-ss626v100.bin即为"快速启动"使用的u-boot镜像。不能用来烧写到EMMC或者SPI FLASH,需要生成非安全启动镜像。
2.生成非安全启动的镜像
SS626V100_SDK_V2.0.0.3/osdrv/components/
tar xf boot.tar.gz
cd boot/gsl/
make
cd .../image_map/
cp .../gsl/pub/gsl.bin ./
cp .../.../.../.../open_source/u-boot/u-boot-2020.01/u-boot-ss626v100.bin ./u-boot-original.bin
cp .../.../.../.../open_source/u-boot/u-boot-2020.01/.reg ./
python3 oem/oem_quick_build.py
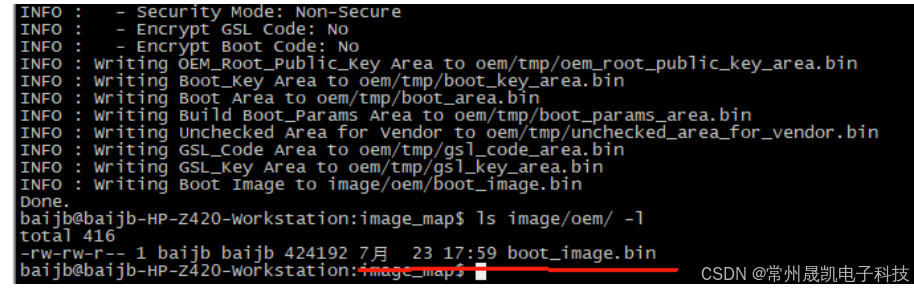
至此,生成了可以烧写的boot镜像。
SS626V100_SDK_V2.0.0.3\osdrv\components\boot\image_map\image\oem 这个SDK编译出来的可用。
三、 单独编译内核:
1、编译内核:
生成默认配置:
SPI NOR 或者SPI NAND FLASH
cp arch/arm64/configs/ss626v100_defconfig .config
EMMC:
cp arch/arm64/configs/ss626v100_emmc_defconfig .config
编译:
make ARCH=arm64 CROSS_COMPILE=aarch64-mix410-linux- menuconfig
make ARCH=arm64 CROSS_COMPILE=aarch64-mix410-linux- uImage -j4
make ARCH=arm64 CROSS_COMPILE=aarch64-mix410-linux- modules
清除:
make ARCH=arm64 clean
2、生成烧写镜像:
编译出来uImage后,再编译能搞烧写的内核镜像。
四、 编译busybox:
忽略。
总结
以上就是编译SS626固件的方法,后续会介绍烧写固件的方法,敬请期待。