引言
目前,我国汽车技术正朝着电动化、智能化、网联化、共享化的"四化"方向发展,这给汽车工业的发展带来了巨大的挑战和机遇。智能网联汽车不仅可提供更安全、更舒适、更节能、更环保的驾驶方式,还会带来汽车产品和技术的升级,从而重塑汽车及相关产业全业态和价值链体系。
本文首先对智能网联汽车技术进行综述性介绍,然后分别介绍视觉传感器在智能网联汽车中的应用、雷达在智能网联汽车中的应用、高精度定位与号航系统、智能网联汽车路径规划与决策控制、汽车总线及车载网络技术、智能网联汽车通信技术、高级驾驶辅助系统(Advanced Driver Assistance Systems,ADAS)与智能网联汽车的应用,最后简要介绍智能网联汽车的操作系统与应用平台。
前三期,我们把智能网联汽车自身智能化部分已经展示出来了,那么网联部分又该如何实现呢?这期我们来聊聊汽车通信技术、以及这些技术的应用和常用的开发平台。

智能网联汽车通信技术
- V2X
V2X即Vehicle to Everything。车辆自身和外界事物之间的信息交换
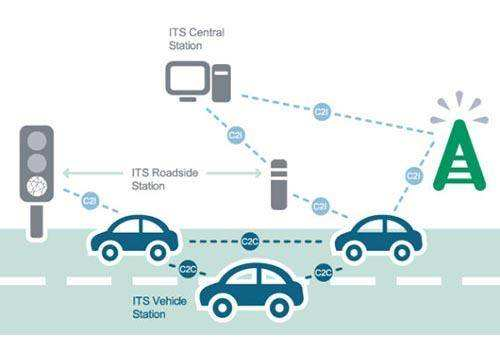
图1 V2X示意图(图源网络)
(1)V2V
V2V即Vehicle to vehicle。车辆自身与其他车辆之间的信息交换
主要包括以下几点:
- 当前本体车辆的形式速度和附近范围内车辆的行驶速度进行信息内容交换
- 当前本体车辆的行驶方向和附近范围内车辆的行驶方向进行信息内容交换
- 当前本体车辆紧急情况和附近范围内车辆的行驶状况进行信息内容交换
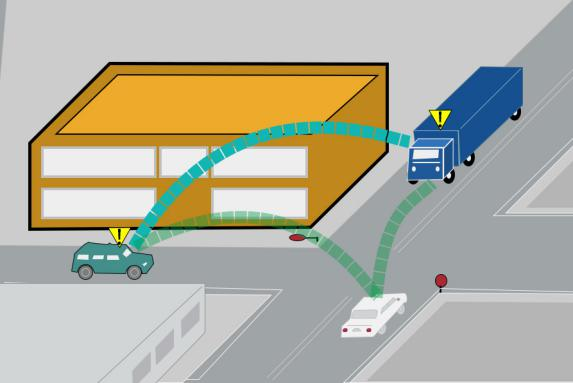
图2 V2V示意图(图源网络)
(2)V2I
V2I即Vehicle to Infrastructure。车辆自身与基础设施之间的信息交换
基础设施主要包括红绿灯、公交站台、交通指示牌、立交桥、隧道、停车场等。
主要包括以下几点:
- 车辆的行驶状态与前方红绿灯的实际状况进行信息内容的交换
- 车辆的行驶状态与途径公交站台的实际状况进行信息内容的交换
- 车辆当前行驶的方向和速度与前方交通标志牌所提示的内容进行信息上的交换
- 车辆的行驶状态与前方立交桥或隧道的监控情况进行信息内容的交换
- 车辆的导航目的地与停车场空位情况进行信息内容的交换
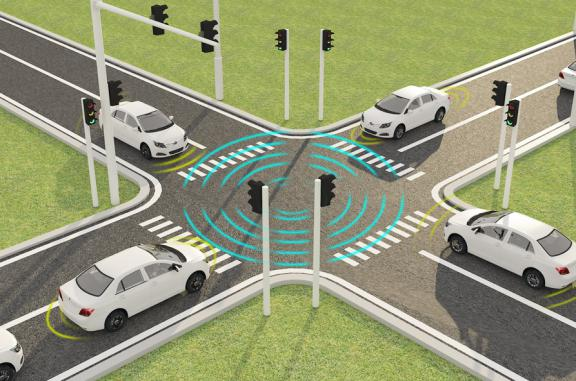
图3 V2I示意图(图源网络)
(3)V2P
V2P即Vehicle to pedestrian。即车辆自身与外界行人之间的信息交换
主要包括以下几点:
- 车辆自身行驶速度与行人当前位置进行信息内容的交换
- 车辆自身行驶方向与行人当前位置进行信息内容的交换

图4 V2P示意图(图源网络)
(4)V2R
V2R即vehicle to Road。车辆自身与道路之间的信息交换。
可分为两大类,一类是车辆自身与城市道路之间的信息交换;另一类是车辆自身与高速道路之间的信息交换。
包括以下几点:
- 车辆自身的行驶路线与道路当前路况进行信息内容的交换
- 车辆自身的行驶方向与前方道路发生的事故进行信息内容的交换
- 车辆行驶的导航信息与道路前方的路标牌进行信息内容的交换
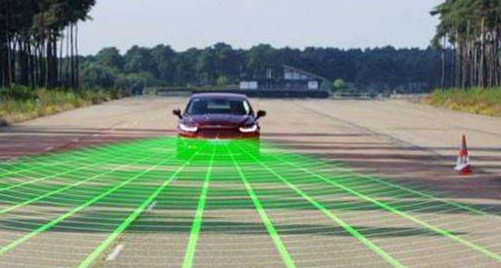
图5 V2R示意图(图源网络)
(5)V2N
V2N即vehicle to network。即车辆自身或驾驶人与互联网之间的信息交换。
主要包括以下几点:
- 车辆自身的行驶信息和传感器数据,与互联网分析的大数据结构进行信息内容的交换
- 车辆终端系统与互联网上的资源进行信息内容的交换
- 车辆自身的故障系统与互联网远程求助系统进行信息内容的交换

图6 V2N示意图(图源网络)
目前,实现V2X功能的网络通信技术主要有移动网络通信技术和物联网无线通信技术。
2. 移动网络通信技术
(1)移动网络通信技术发展
移动网络通信技术系统主要有空间系统(如卫星等)、地面系统(如地面基站、交换中心等)两大部分组成。
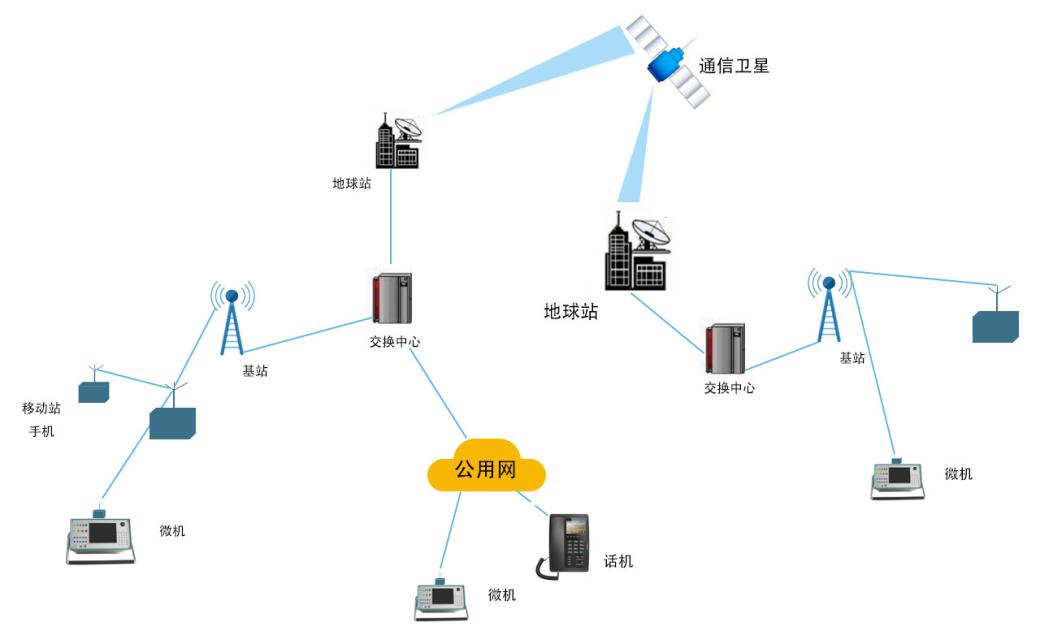
图7 移动网络通信技术系统示意图(图源网络)
到目前为止,移动网络通信在技术上已经历经了5次更新换代:1G~5G
5G网络架构包含有独立的独立组网模式SA和4G网络相结合的非独立组网模式NSA
独立组网模式SA是指需要全新打造5G网络环境,如5G基站、5G核心网等。
非独立组网模式NSA是指在现有的4G硬件设施基础上,实施5G网络的部署工作。
3GGP(第三代合作伙伴计划)定义了5G网络的三大应用场景
- ****eMBB:****增强移动带宽,满足用户观看超高清视频或进行虚拟现实和增强现实的需求
- ****mMTC:****海量机器类通信,应用于大规模的物联网和智能网联技术上,段记录通信技术和低功耗广域网通信技术。
- ****URLLC:****极可靠低延迟通信:追求对机器机械类远程控制的可靠型、安全性和低延迟性
(2)5G关键技术及在V2X中的应用
- 5G网络的关键技术
设备到设备的通信(D2D)
优势:
- 提高频谱使用效率
- 增强用户体验
- 拓展网络应用
主要应用场景:
- 本地业务,如用户资源共享
- 应急通信,如自然灾害摧毁通信基础设施,用户通过D2D技术仍可进行通信
- 物联网增强,如智能网联汽车V2X功能
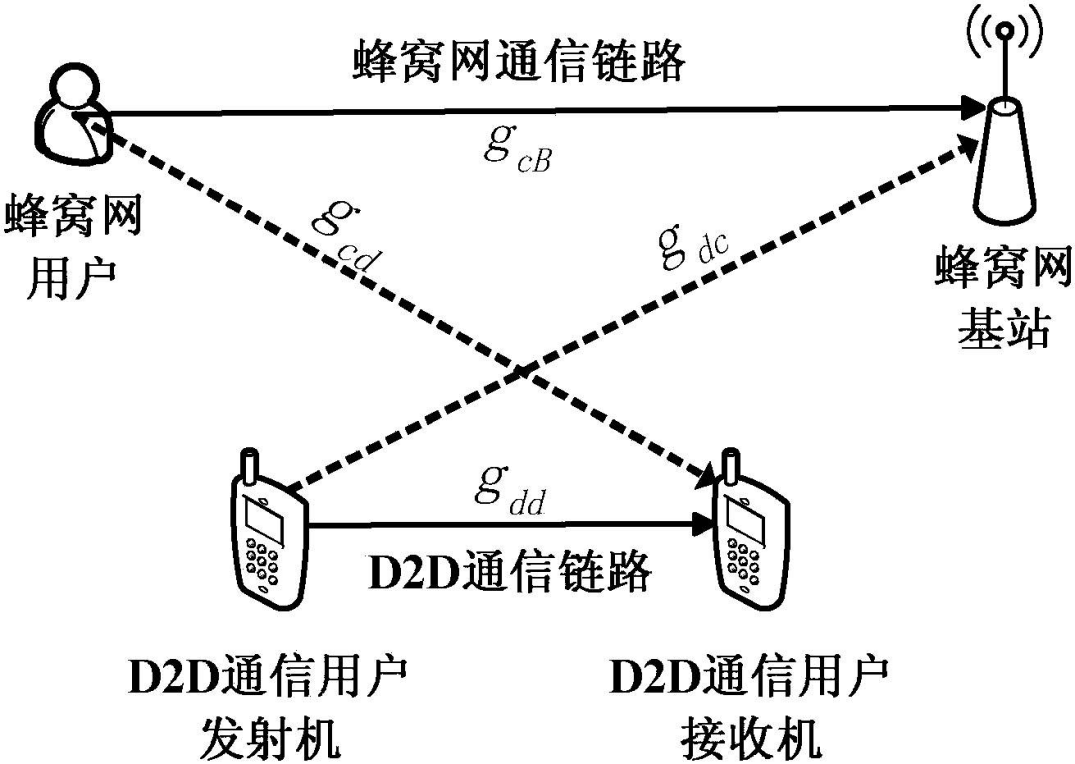
图8 D2D技术示意图(图源网络)
- 大规模输入输出技术
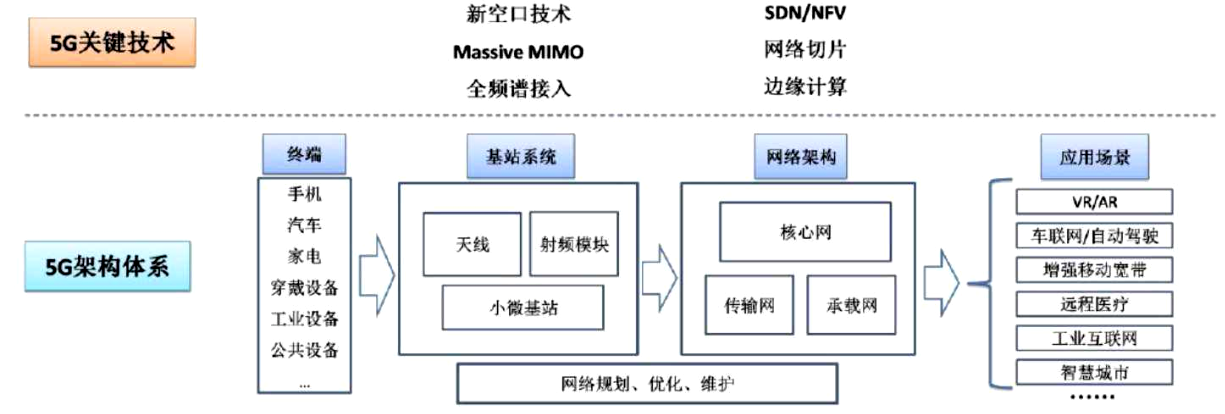
图9 大规模输入输出技术示意图(图源网络)
- 高频段传输
由于2G、3G、4G网络通信频率都在3GHz以下,导致低频率的可用频段资源极为有限。所以5G网络的建设分为两大频谱,分别为低频段和高频段。低频段是指在3GHz以上且小于6GHz的频段,而高频段是指大于30GHz频段的毫米波移动通信技术。
- 高密度组网
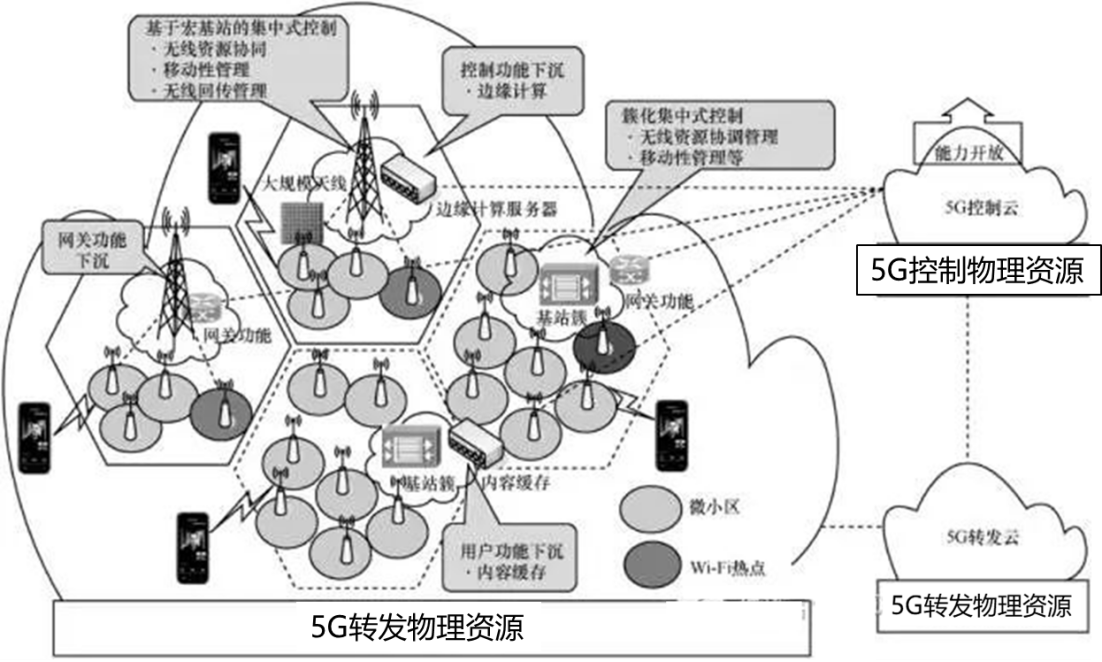
图10 高密度组网技术示意图(图源网络)
- 5G在V2X中的应用
5G支持大数据传输带宽、支持本地点对点通信,提高信息传输可靠性、极低延迟和容错性。利用增加的数据传输能力,可以提高车辆运输的安全性,这包括在智能网联汽车之间共享传感器数据,使用宽带支持改善定位,以及为自动驾驶共享高精三维地图。
3.物联网无线通信技术
物联网无线通信技术是指车辆、硬件设备、家用电器、公共设施与电子产品、应用软件、控制器、传感器等,分别连接到互联网中,并通过无线网络技术进行信息交换。

图11 物联网无线通信技术示意图(图源网络)
(1)短距离无线通信技术
- WiFi通信技术
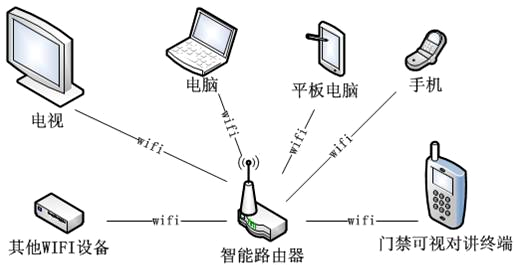
图12 WIFI通信技术示意图(图源网络)
- 蓝牙通信技术
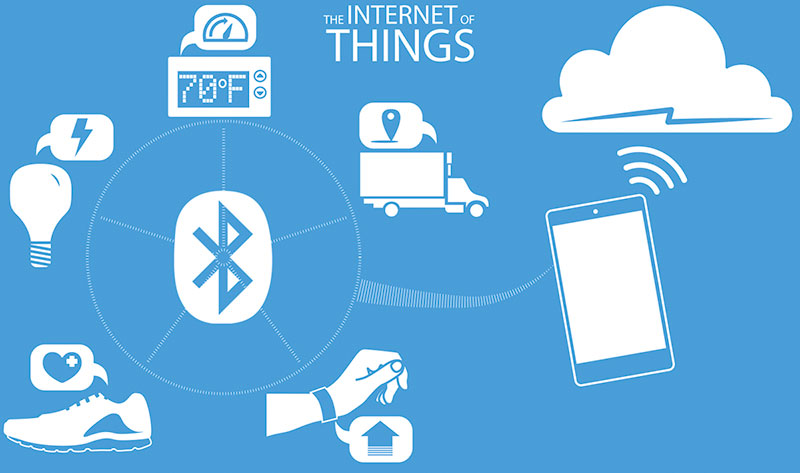
图13 蓝牙通信技术示意图(图源网络)
- 射频识别通信技术
- 无源RFID产品:无电源,如饭卡,公交卡,门禁卡
- 有源RFID产品:有电源,有较远识别范围,如智慧停车场、智慧交通、智慧农场
- 半有源RFID产品:结合有源和无源的工作特点,只有在它进入低频信号激活范围内,才被激活使用。如:违章摄像头、交通监视器。
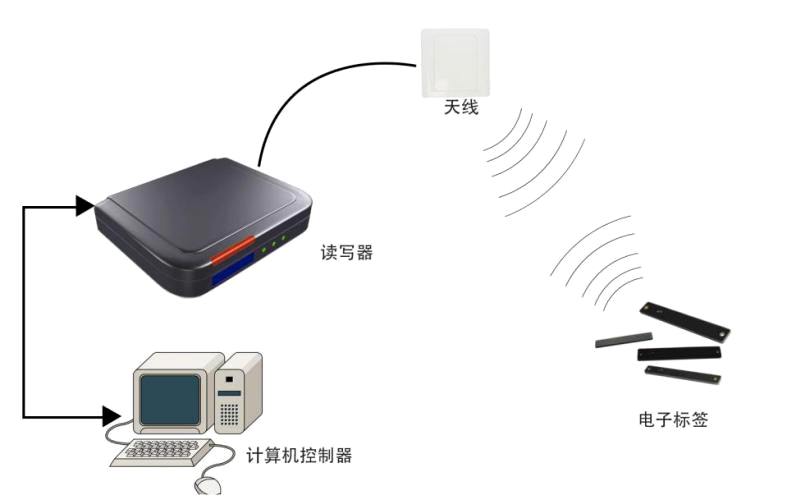
图14 射频识别通信技术示例图(图源网络)
- Zigbee通信技术:"紫蜂协议",小范围,低功耗,低速率,低成本的无线自组网技术。应用领域为自动化领域和远程控制领域。
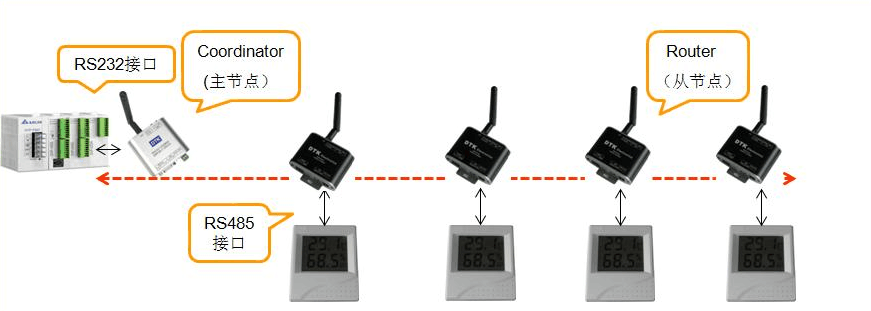
图15 Zigbee通信技术示意图(图源网络)
(2)低功耗广域网通信技术
- LoRa通信技术:远距离通信,最远可达20KM;优点:低功耗;多节点,网络节点可达十万级。缺点:频段易受到干扰,需重新建设网络信号塔和基站,广泛应用在工业科学医学领域。
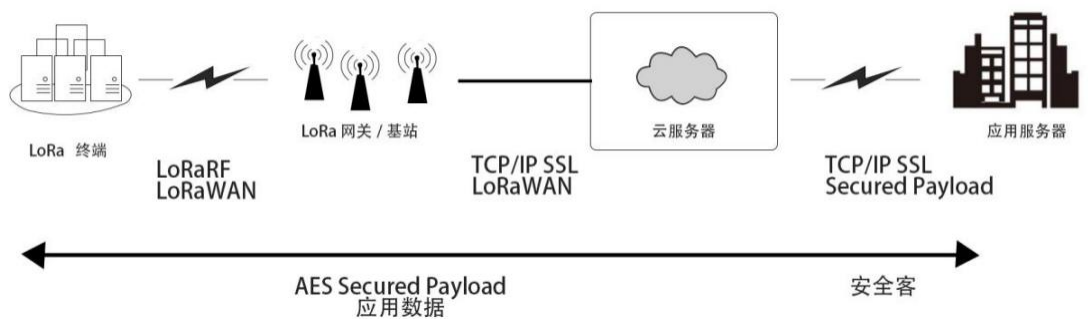
图16 LoRa通信技术示意图(图源网络)
- NB-IoT通信技术:窄带物联网技术,由NB-IoT终端、NB-IoT信息邮局、NB-IoT人机交互系统三部分组成,可直接部署在现有网络,覆盖广、低成本、低功耗、支持海量链接。
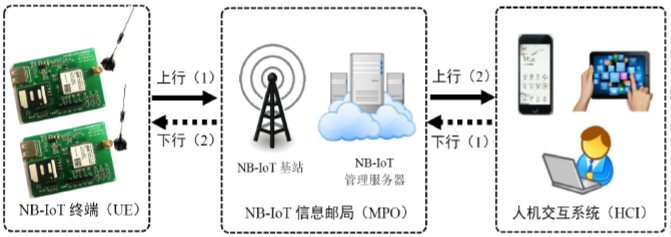
图17 NB-IoT通信技术示意图(图源网络)
(3)物联网无线通信技术在智能网联汽车中的应用
- 智能网联汽车在行驶过程中遇到前方出现了紧急情况时,可通过蓝牙通信技术向驾驶人发出提示信息
- 智能网联汽车在行驶过程中突然发生故障时,可以有两种解决方法。第一种是通过WIFI通信技术,使用车辆终端系统向服务器平台发送支援请求。第二种办法是通过Zigbee网络技术向附件车辆发出支援请求。
- 智能网联汽车在自动驾驶中,可通过射频识别技术获取前方道路信息,并对行驶方向进行控制与调整
- 可通过RoLa和NB-IoT通信技术,打造车与车,车与路、车与互联网的低功耗广域网络。

ADAS与智能网联汽车的应用
- 高级辅助驾驶系统及应用
ADAS是Advance Driver Assistance System的缩写,意为高级驾驶辅助系统。
****ADAS定义:****利用安装在车辆上的传感、通信、决策及执行等装置,监测驾驶人、车辆及其行驶环境,并通过影像、灯光、声音、触觉提示/警告或控制等方式辅助驾驶人执行驾驶任务,或主动避免/减轻碰撞危害的各类系统的总称。
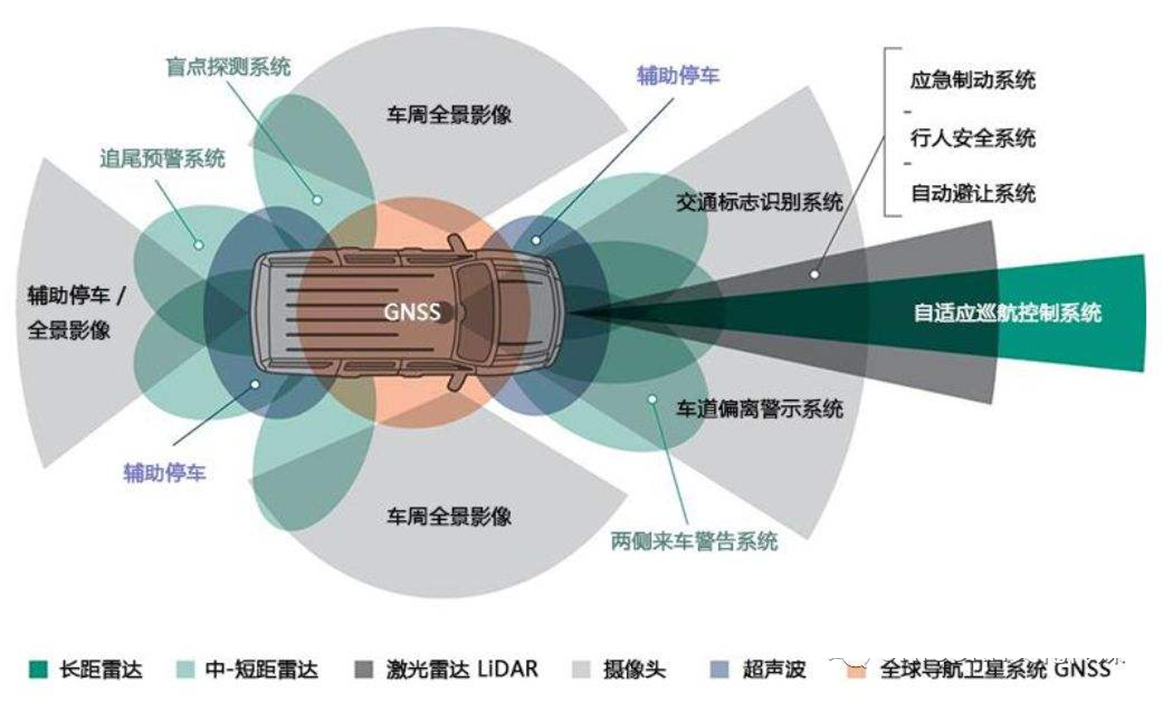
图18 ADAS技术示意图(图源网络)
- ADAS有两条技术路线:
- 从预警系统到干预系统的升级
例:摄像系统将从车道偏离系统发展到车道控制系统
- 将主动安全与被动安全系统相结合
例:车载激光雷达、毫米波雷达或视频传感器检测到不可避免的碰撞时,可以提前给出信号到安全气囊控制单元做好安全气囊弹出预备,以减少对人员的伤害。
从对驾驶人辅助的方式角度,ADAS系统可以分为预警类辅助驾驶系统和控制类辅助驾驶系统两个部分。
- ****预警类辅助驾驶系统:****车辆识别是一个先决条件,通常使用后摄像头、前视摄像头、雷达等传感器来实现。
主要功能:
- 驾驶人疲劳监测
- 驾驶人注意力监测
- 车辆监测
- 交通标志识别
- 智能限速提醒
- 弯道速度预警
- 抬头显示
- 全景影像监测
- 夜视
- 行人检测
- 前向车距监测
- 前向碰撞预警
- 后向碰撞预警
- 车道偏移报警系统
- 变道碰撞预警
- 盲区监测
- 侧面盲区监测
- 转向盲区监测
- 后方交通穿行提示
- 前方交通穿行提示
- 车门开启预警
- 倒车环境辅助
- 低速行车环境辅助
- ****控制类辅助驾驶系统:****主要由GPS和CCD摄像头检测模块,通信模块和控制模块组成。
主要功能:
- 自动紧急制动
- 紧急制动辅助
- 自动紧急转向
- 紧急转向辅助
- 智能限速控制
- 车道保持辅助
- 车道居中控制
- 车道偏离抑制
- 智能泊车辅助
- 增强现实导航
- 自适应巡航控制
- 全速自适应巡航控制
- 交通拥堵辅助
- 加速踏板防误踩
- 酒精闭锁
- 自适应远光灯
- 自适应前照灯
- 远光自动控制
目前ADAS在智能驾驶L1、L2、L3级别中的应用相对成熟。
L1阶段的汽车主要技术包括自适应巡航、车道保持功能、紧急制动等功能
L2阶段的汽车不同的厂商配置了不同的功能,如上坡辅助、陡坡缓降、自动驻车、全速自适应巡航、自动紧急制动、车道偏离预警、盲区监测、智能并线辅助、车道偏离预警、360°全景影像、智能领航系统、车道保持系统、全自动智能泊车系统、交通限速标志智能识别、电子烟限速、城市防碰撞、行人识别与保护功能、半自动驾驶、交通拥堵辅助系统、自动跟车、弯道自动行驶、开门预警、倒车侧向警告、半自动泊车等。
L3阶段最先搭载的是奥迪A8,自动驾驶只在60km/h的速度下生效,可完成起动,加速,转向和制动,一旦自动驾驶系统的操控达到极限,就会立刻通知驾驶人重新掌管驾驶。

1.智能网联汽车的操作系统与应用平台简介
- 智能网联汽车的操作系统------Linux
(1)Linux内核由以下五个子系统构成。
- ****进程调度:****进程是系统在运行程序时,该程序实时所获得的资源分配以及优先级的调度情况。每个程序至少都包含一个进程。
- ****内存管理:****控制系统中正在运行程序进程之间的内存共享区域
- ****虚拟文件系统:****Linux把文件、目录、设备、套接字都定义成文件。它们虽然属于不同的类型,但是Linux系统却为它们提供了统一的文件访问接口。
- ****网络接口:****为Linux系统在网络通信过程中提供了对网络协议标准的存取和网络硬件的支持。
- ****进程之间的通信:****Linux系统支持进程之间的相互通信机制。主要包括套接字、信号、报文、共享内存等。
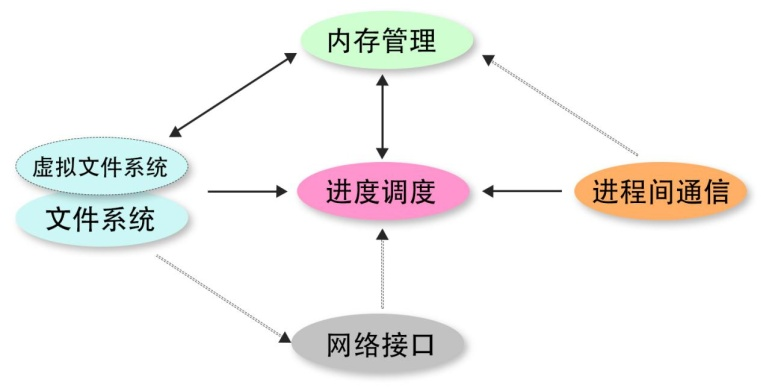
图19 Linux内核示意图(图源网络)
(2)Linux系统有以下特点
- 系统源码完全开放,便于进一步研究学习和完善Linux系统
- 免费
- 具有较高的稳定性,可长时间连续运行
- 应用领域较为广泛,Linux不仅可以在计算机设备中运行,还可以在路由器、机顶盒、手机、平板电脑、以及嵌入式设备中安装并使用
- Linux系统本身消耗的内存相对较少。
(3)Linux系统在智能网联汽车中的优势
- 开源和定制性
- 稳定性和安全性
- 支持多种硬件平台
- 强大的网络和通信功能
- 社区支持和活跃的开发生态
2.智能网联汽车的开发平台------ROS
(1)ROS概述
ROS是Robot+Operating+System的简称,即机器人操作系统
ROS并不是一个真正的操作系统,而是一款用于机器人或人工智能的应用软件开发平台。
ROS的特性包括以下几点:
- 点对点设计
- 分布式设计
- 支持多种语言
- 丰富的软件功能包
- 免费且开源
(2)ROS在智能网联汽车中的应用
计算图级是ROS为了处理各节点间的数据而建立的一种点对点的拓扑结构图
主要包括:
- ****节点:****把智能网联汽车本身的制动系统定义为一个节点,然后再把激光雷达定义为一个节点。当激光雷达探测到前方有障碍是,激光雷达所在的节点就会发出通知给制动系统的节点。制动系统接收到通知后,可根据探测情况,开始进一步操作判断。
- ****节点管理器:****为ROS节点提高命名和注册服务;方便ROS节点之间进行相互查找;有助于ROS节点之间建立相互的通信连接;提供参数服务器,帮助ROS管理全局参数。
- ****主题:****节点间通信的最基本方式,由摄像头节点发布一个检测路面是否出现行人的主题,频率为20HZ,这样就使摄像头节点成为一个主题的发布者。再令转向系统,加速系统,制动系统分别去订阅这个检测路面行人的主题,使其成为主题的订阅者。如果前方没有出现行人,则转向系统和加速踏板将继续正常工作;如果前方出现行人,则转向系统和加速他把在停止工作的同时会开启制动系统。
- ****消息:****节点之间进行通信传输的一种数据类型。例:定义一个名为障碍物的消息类型,消息类型中包含三个字段分别是障碍物的长度、宽度、高度。
- ****服务:****例如:智能网联汽车在行驶过程中想要提高车速,于是电子加速踏板节点向毫米波雷达节点发出服务请求,请求消息类型是方向为正前方,测量范围为200m。毫米波雷达节点接收到服务请求后,进行正前方200m以内探测后,将探测结果的响应给电子加速踏板节点,响应信息类型是无任何障碍物。
- ****消息记录包:****是一种文件格式,主要用于在ROS中对消息数据、主题数据、数据服务以及其他信息数据进行保存。通过记录包可以实现情景再现功能,主要应用于智能网联汽车相关功能的测试
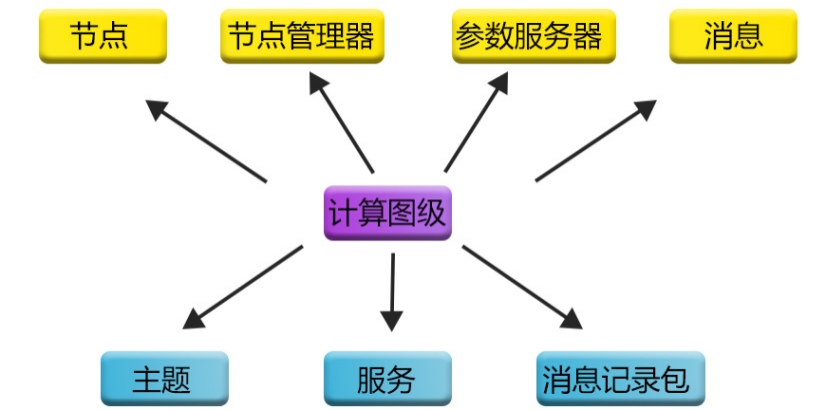
图20 ROS计算图级示意图(图源网络)
- 智能网联汽车的学习平台------Gazebo
Gazebo是一款虚拟仿真工具,有强大的物理引擎和高质量的图形界面
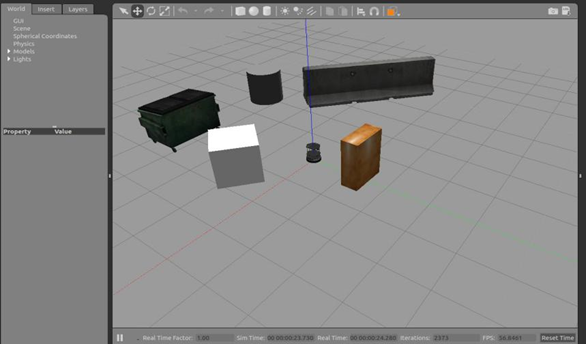
图21 Gazebo界面(图源网络)
- 有以下特点
- 模拟动力学,可访问多个高性能物理引擎
- 提供了逼真的环境渲染,包括高质量的照明、阴影和纹理
- 可生成带有噪点的仿真传感器,包括激光测距仪、2D/3D摄像机、Kinect风格的传感器、触点传感器、力-力矩传感器等。
- 有很多基于传感器和环境控制的插件
- 提供了很多仿真模型
- 可以在远程服务器上运行模拟操作,并能使用protobuf结构化数据储存格式进行TCP/IP的消息传输
- 在智能网联汽车中的应用
可以帮助智能网联汽车进行传感器设备的模拟调试和选择
利用仿真环境,可以进行路径规划、实时避障以及相关导航算法的模拟实验
配合ROS中的3D可视化工具,进行快速算法测试和人工智能学习。

总结
智能网联汽车是当代汽车工业的重要发展方向,融合了人工智能、物联网、大数据等先进技术,提升汽车了自动化、智能化和互联能力。
该技术的核心包括感知、决策、控制、车载通信等模块。感知系统依赖激光雷达、摄像头、毫米波雷达等设备,采集车辆周围环境的信息。决策系统基于深度学习算法,对实时数据进行分析并做出驾驶决策。控制系统包括车身电器系统、底盘线控系统。车载通信则通过V2X(车与车、车与基础设施的通信)技术,实现车辆之间以及车辆与道路设施的高效信息交换。
随着5G网络的普及和人工智能技术的进步,智能网联汽车的应用前景广阔,包括无人驾驶出租车、智能交通管理系统等。它不仅将改变人们的出行方式,还将推动整个汽车产业的数字化转型。然而,技术的成熟仍需解决诸如网络安全、法律法规等方面的挑战。