引言:从碎片化到互联------机器人操作的基准痛点灵巧操作(dexterous manipulation)让机器人从被动观察者转变为非结构化环境中的主动代理人,是物理人工智能的核心。尽管硬件、感知、控制与学习领域数十年积累丰厚,但通用操作系统的进展仍碎片化,主要因缺乏广泛采用的测试基准。研究者在该方向开展了诸多工作:仿真基准如RLBench提供可重现性,却难以建模真实物理世界;真实世界竞赛如RGMC(Robotic Grasping and Manipulation Competition)保真度高,但难以规模化。以上局限性造成了即使是表面上相同的任务,不同研究之间也难以直接比对,科学进步无法累积。ManipulationNet应运而生,它是由美国国家标准与技术研究院(U.S. NIST)支持、通过社区驱动的全球性基础设施,首次平衡了物理真实性(authenticity)、访问易用性(accessibility)与数据可信性(realism)。它基于标准化硬件套件与统一软件客户端(mnet-client)建立真实世界基准任务,支持分布式提交与中心化评估。研究者随时随地、使用任何机器人提交解决方案,并在全球排行榜上展示成果------正如ImageNet重塑视觉领域那样,ManipulationNet正致力于推动机器人操作研究进入新阶段。过往工作回顾:基础与局限过去四十年间,机器人操作性能评估的研究主要围绕三类方法展开:1、标准化物体集与任务协议(如 Columbia Grasp Database、YCB Object Set),为抓取与装配等任务提供统一评估基础;
2、真实世界竞赛(如 Amazon Picking Challenge、RoCKIn),在集中式环境中验证系统鲁棒性;3、仿真基准平台(如 RoboSuite、RLBench),支持模块化任务与多模态学习的大规模测试。这些方法各自推动了领域发展,但均未能在物理真实性、访问易用性与数据可信性三者之间实现平衡,导致不同研究结果之间难以进行系统性比较,阻碍了机器人操作技术的整体进展。ManipulationNet框架:混合架构与互联设计ManipulationNet采用混合中心-分布式架构:全球分发标准化对象集与协议,确保任务可重现;本地客户端收集实时指令与结果,传输至中心服务器(mnet-server)验证公平性。ManipulationNet为不同的技术路线提供了两大赛道:1、物理技能赛道(Physical Skills Track):评估基础交互技能,如工业装配中的抓取、插入。首发任务:销钉入孔装配(Peg-In-Hole Assembly)。2、具身推理赛道(Embodied Reasoning Track):评估机器人的多模态理解,将语言/视觉指令翻译为动作的能力。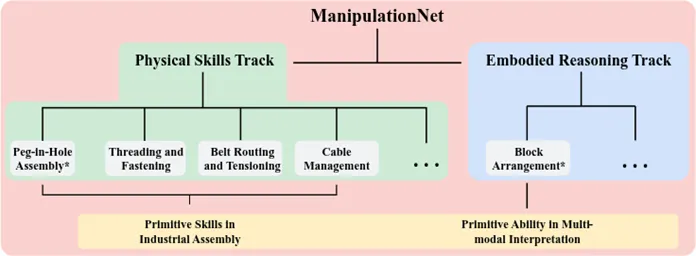
首发任务:物块排列(Block Arrangement)。这一设计旨在构建一个"技能网络":物理技能可组合成复杂行为,认知能力能支撑可靠的交互,而知识则可以在不同任务间迁移。在这一框架下,ManipulationNet的短期目标是驱动大规模基准的建立;中期将扩展挑战任务的类型(如柔性物体操作);长期则致力于记录机器人能力发展轨迹,从而精准识别可投入实际应用的成熟系统,并揭示研究中存在的差距。首发任务详解:诊断核心能力销钉入孔装配:物理交互的"硬核"考验该任务对机器人操作的精度提出了很高的要求。该任务使用五种不对称销钉(不锈钢材料,公差<20μm),任务板上有四级间隙(3mm至0.02mm),材质选用透明亚克力板,以提升感知难度。机器人按照间隙从大到小的顺序将销钉插入任务板上的间隙,复杂度递增,支持全自主/人类在环/遥操作模式。评测指标包括成功率与适应性。该任务的挑战包括:小间隙摩擦、透明物体感知、真实动力学下鲁棒性。物块排列:多模态推理的"脑力"较量该任务旨在降低物理操作的复杂性,重点检验机器人对语言、视觉及其组合提示的语义理解与执行能力。任务使用五种颜色的木块(每种颜色10块),包含10轮测试:每轮包含三个子任务------语言指令(例如"堆叠三个蓝色木块")、视觉模仿(复制参考图像,推理必要的支撑结构)以及视觉-语言组合任务(根据抽象指令完成操作,如在有遮挡情况下实现指定布局)。任务设置了四个难度级别,从基础的颜色识别到复杂的空间与物理推理。所有任务均由机器人自主执行,人类仅在每轮开始前协助恢复初始状态。评估方式采用二元成功制(即最终布局是否与提示匹配)。该任务的主要挑战在于多模态信息的有效整合,以及如何从局部视觉信息中推断完整布局。为何加入 ManipulationNet?科学与社区的双重价值ManipulationNet 不仅提供全球统一的性能排行榜,更致力于构建机器人技能网络与研究进展轨迹,推动领域从"孤立突破"走向"系统整合"。该项目由来自莱斯大学、麻省理工学院、清华大学等多所顶尖机构的创始委员会共同发起,诚邀全球研究者参与任务共建与性能评估。截至2025年10月,平台已发布首批任务,支持机器人从结构化工业场景向开放服务场景的能力跨越。快速参与指南注册与准备:在项目官网完成注册,审核通过后将获得标准化物体套件。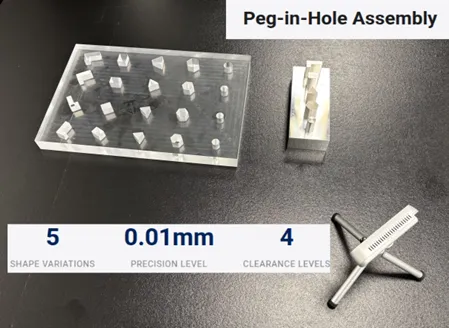
系统配置: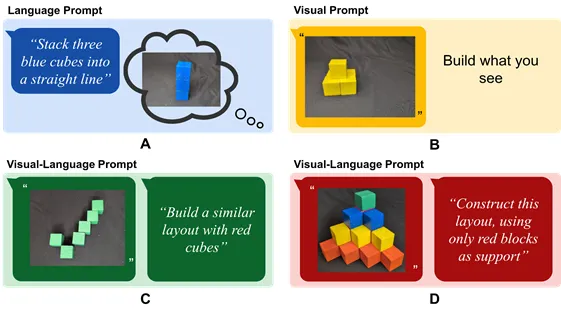
配置基于ROS / ROS2的机器人系统,并连接独立摄像头用于任务录制。执行与提交:通过 mnet-client 执行任务并提交结果。系统将实时验证视频哈希值,确保数据完整性。结果发布:通过集中审核后,性能结果将在全球排行榜公布,助力研究透明化与协作推进。了解更多关于 ManipulationNet的信息,请访问以下链接:项目网站:https://manipulation-net.org创始委员会:https://manipulation-net.org/committee.html论文:https://manipulation-net.org/MNet_preprint.pdfGitHub代码库:https://github.com/ManipulationNet/mnet_clientmnet文档:https://mnet-client.readthedocs.io