背景意义
研究背景与意义
随着城市化进程的加速,交通管理与道路监测的重要性日益凸显。遥感技术的快速发展为道路检测与分割提供了新的解决方案,尤其是在复杂环境下,传统的人工检测方法往往效率低下且容易出错。因此,基于遥感图像的自动化道路检测系统成为了研究的热点之一。近年来,深度学习技术的进步,尤其是目标检测算法的不断演化,使得计算机视觉在道路检测领域展现出强大的潜力。YOLO(You Only Look Once)系列算法因其高效性和实时性而备受关注,尤其是YOLOv11的推出,为解决遥感图像中的道路检测问题提供了新的思路。
本研究旨在基于改进的YOLOv11算法,构建一个高效的遥感图像道路检测分割系统。该系统将专注于识别和分割遥感图像中的道路信息,帮助相关部门进行交通规划、道路维护和安全监测。通过使用一个包含217幅图像的专用数据集,该数据集专注于道路这一单一类别,能够有效减少模型训练的复杂性,并提高检测精度。此外,数据集采用YOLOv8格式进行标注,确保了与现有深度学习框架的兼容性。
在实际应用中,准确的道路检测不仅能够提升交通管理的效率,还能为智能交通系统的构建提供基础数据支持。随着智能城市的不断发展,基于遥感图像的道路检测技术将成为未来交通管理的重要组成部分。因此,本研究的开展具有重要的理论价值和实际意义,能够为相关领域的研究提供新的思路和方法,同时推动遥感技术与深度学习的结合,为智能交通的实现奠定基础。
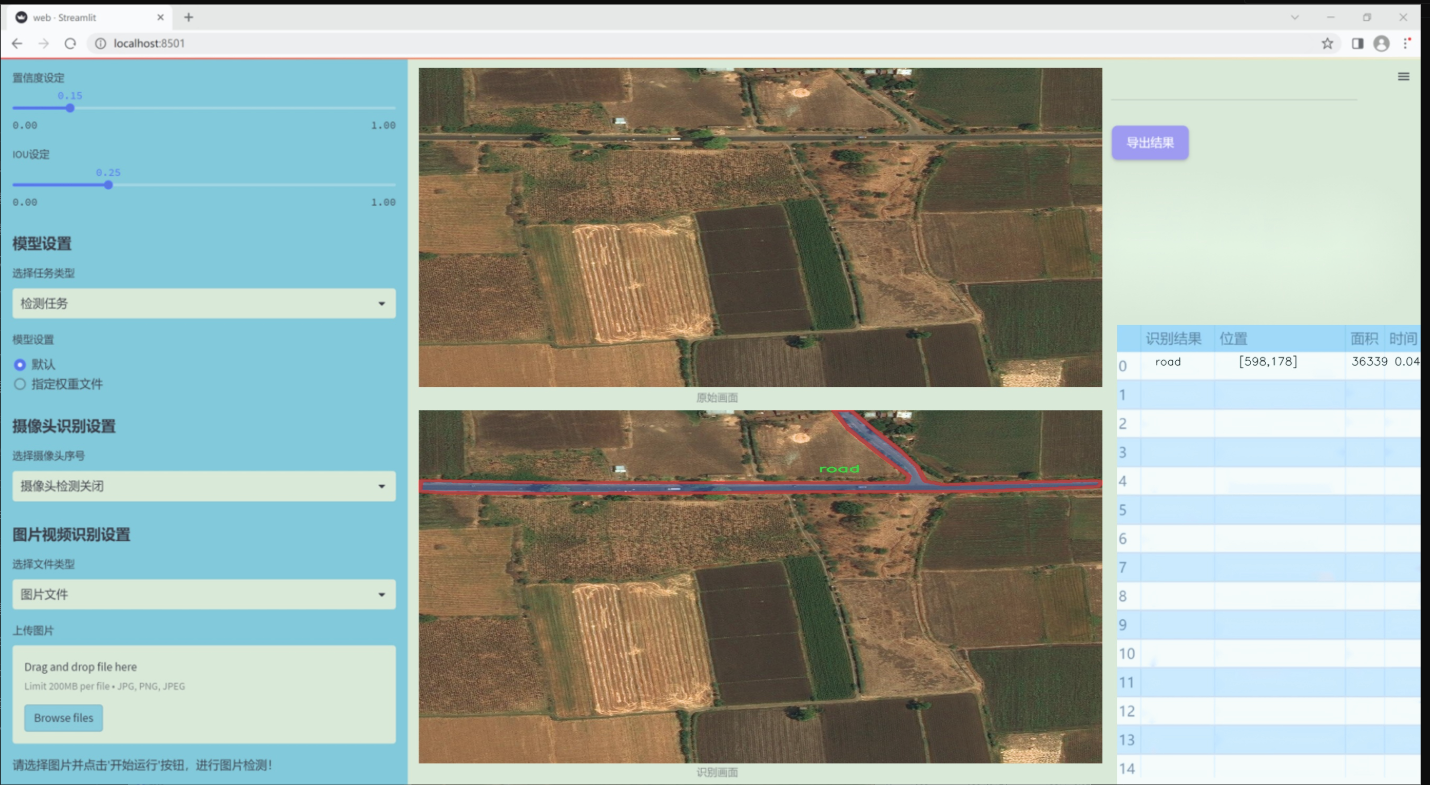
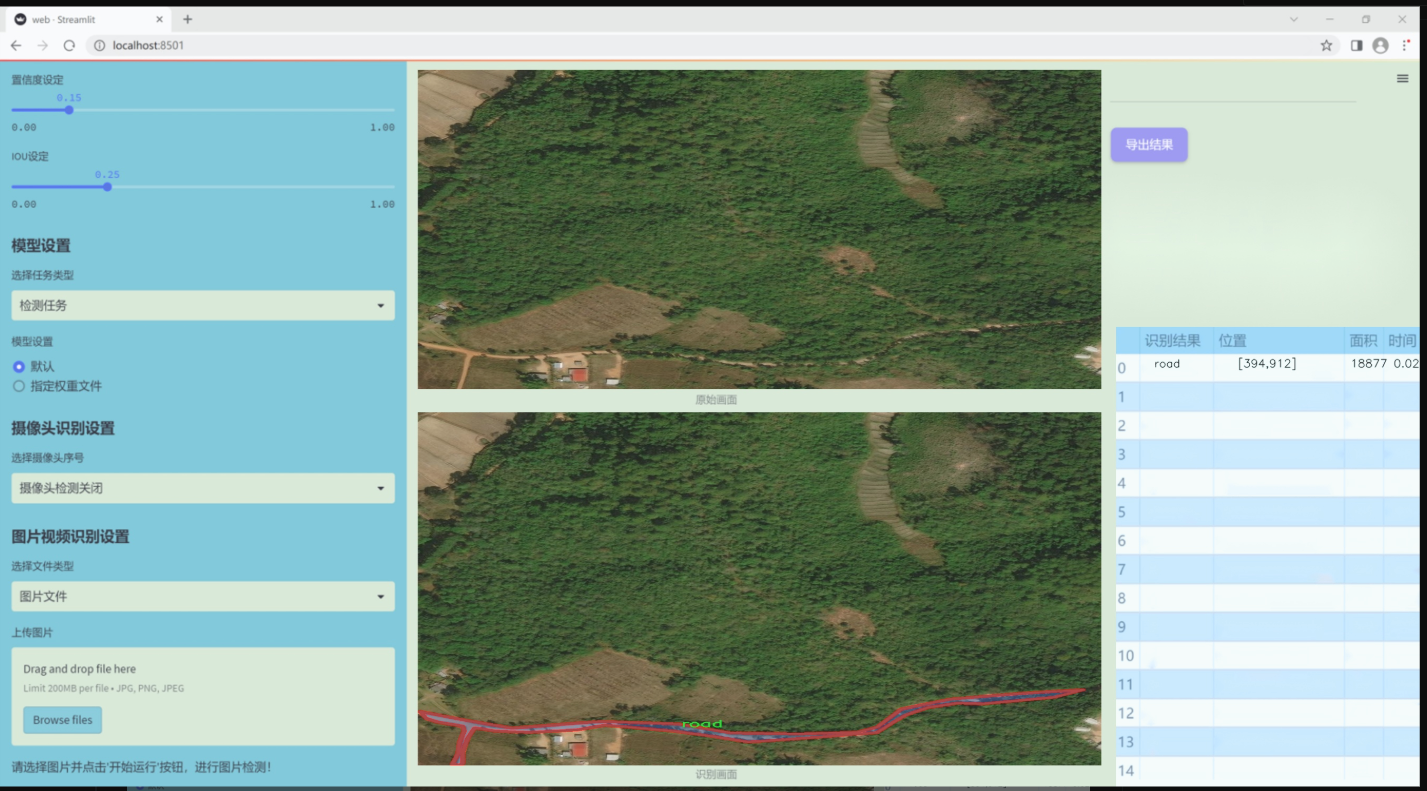
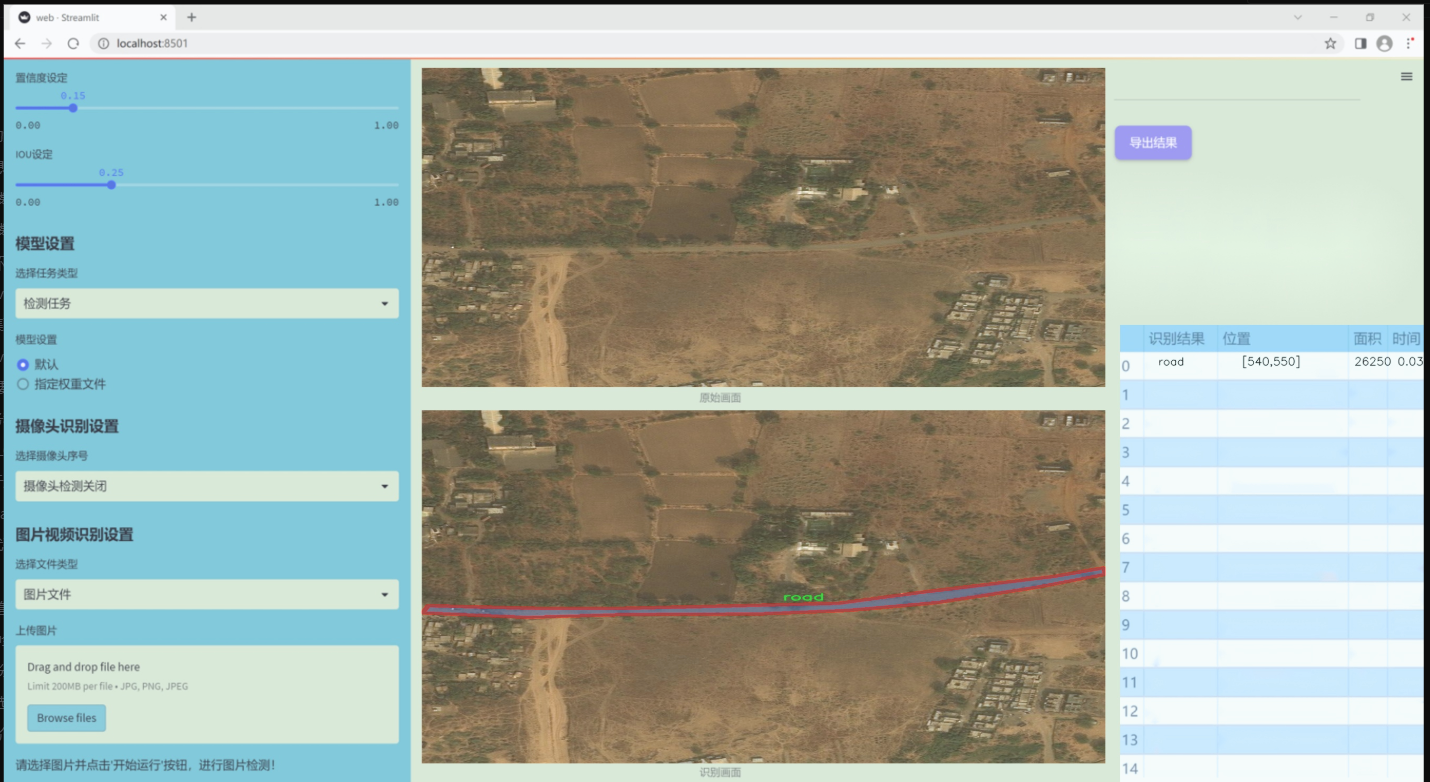
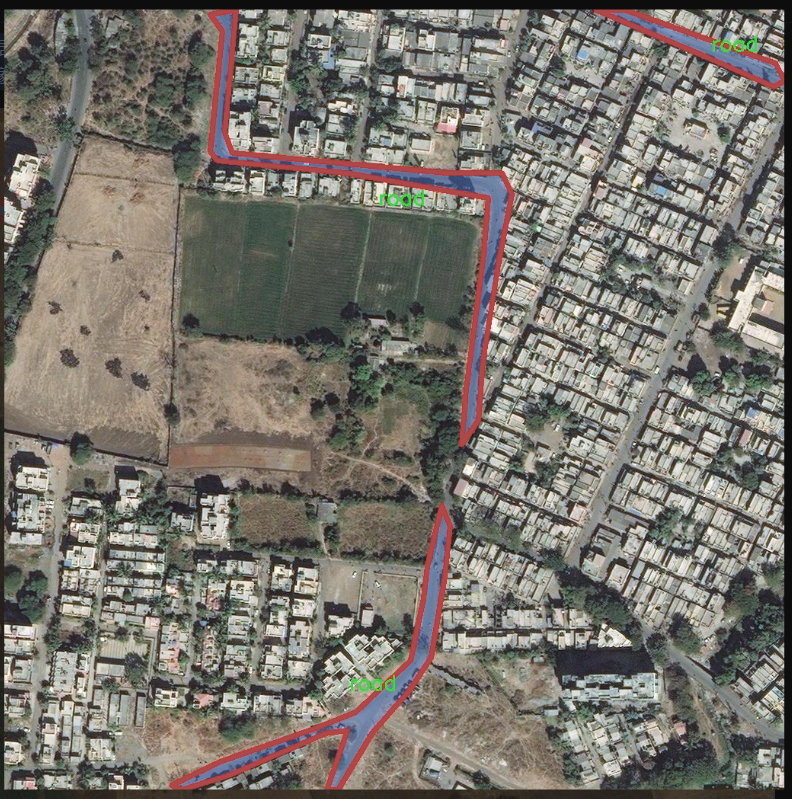
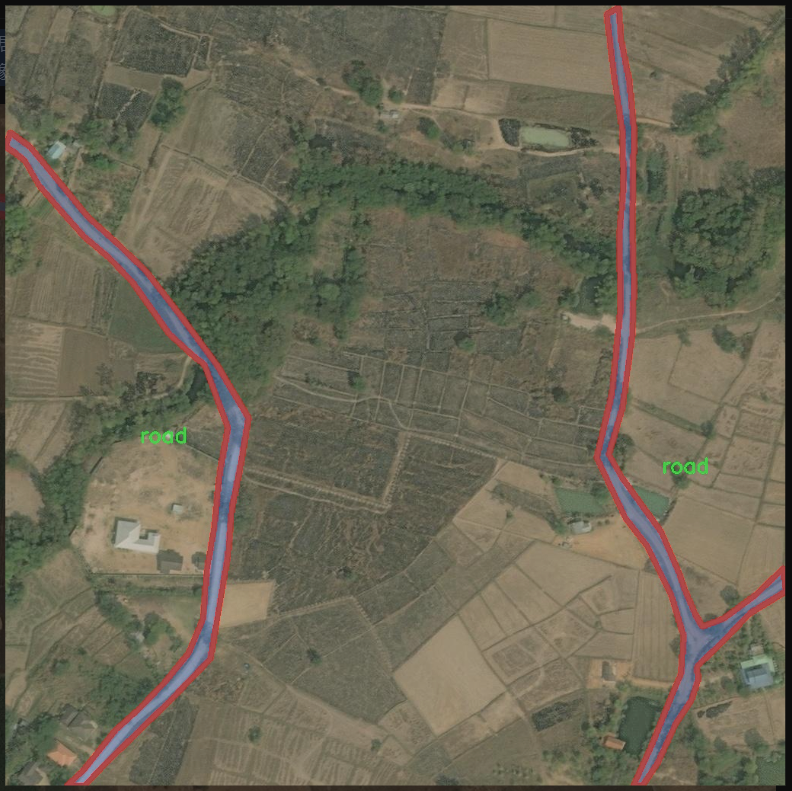
图片效果
数据集信息
本项目数据集信息介绍
本项目所使用的数据集专注于遥感图像中的道路检测与分割,旨在为改进YOLOv11模型提供高质量的训练素材。数据集的主题为"road 2",主要包含与道路相关的图像数据,旨在提升模型在复杂环境下的道路识别能力。该数据集的类别数量为1,具体类别为"road",这意味着所有的标注均围绕道路的特征展开,确保模型能够专注于道路的检测与分割任务。
在数据集的构建过程中,特别注重图像的多样性与代表性,以涵盖不同地理环境、天气条件和光照变化下的道路特征。这种多样性不仅有助于提升模型的泛化能力,还能增强其在实际应用中的鲁棒性。数据集中的图像来源于多种遥感平台,涵盖城市、乡村、山区等多种场景,确保模型能够在不同的背景下有效识别道路。
此外,数据集中的每一幅图像均经过精细的标注,确保道路区域的准确性和完整性。这种高质量的标注为模型的训练提供了坚实的基础,使其能够学习到道路的形状、宽度及其与周围环境的关系。通过对这些数据的深入分析与学习,模型将能够更好地理解道路在不同场景中的表现,从而实现更为精准的检测与分割。
综上所述,本项目的数据集不仅为YOLOv11的改进提供了必要的训练素材,还通过其丰富的多样性和高质量的标注,助力于实现更高效的遥感图像道路检测与分割系统。



核心代码
以下是对代码的核心部分进行分析和详细注释的结果:
import torch
import torch.nn as nn
from ...modules.conv import Conv
all = 'DySnakeConv'
class DySnakeConv(nn.Module):
def init (self, inc, ouc, k=3) -> None:
super().init()
# 初始化三个卷积层
self.conv_0 = Conv(inc, ouc, k) # 标准卷积
self.conv_x = DSConv(inc, ouc, 0, k) # 沿x轴的动态蛇形卷积
self.conv_y = DSConv(inc, ouc, 1, k) # 沿y轴的动态蛇形卷积
def forward(self, x):
# 前向传播,连接三个卷积的输出
return torch.cat([self.conv_0(x), self.conv_x(x), self.conv_y(x)], dim=1)class DSConv(nn.Module):
def init (self, in_ch, out_ch, morph, kernel_size=3, if_offset=True, extend_scope=1):
"""
动态蛇形卷积
:param in_ch: 输入通道数
:param out_ch: 输出通道数
:param kernel_size: 卷积核大小
:param extend_scope: 扩展范围(默认1)
:param morph: 卷积核的形态,分为沿x轴(0)和y轴(1)
:param if_offset: 是否需要变形,False为标准卷积
"""
super(DSConv, self).init ()
用于学习可变形偏移的卷积层
self.offset_conv = nn.Conv2d(in_ch, 2 * kernel_size, 3, padding=1)
self.bn = nn.BatchNorm2d(2 * kernel_size) # 批归一化
self.kernel_size = kernel_size
# 定义沿x轴和y轴的动态蛇形卷积
self.dsc_conv_x = nn.Conv2d(
in_ch,
out_ch,
kernel_size=(kernel_size, 1),
stride=(kernel_size, 1),
padding=0,
)
self.dsc_conv_y = nn.Conv2d(
in_ch,
out_ch,
kernel_size=(1, kernel_size),
stride=(1, kernel_size),
padding=0,
)
self.gn = nn.GroupNorm(out_ch // 4, out_ch) # 组归一化
self.act = Conv.default_act # 默认激活函数
self.extend_scope = extend_scope
self.morph = morph
self.if_offset = if_offset
def forward(self, f):
# 前向传播
offset = self.offset_conv(f) # 计算偏移
offset = self.bn(offset) # 批归一化
offset = torch.tanh(offset) # 将偏移限制在[-1, 1]
# 获取输入特征的形状
input_shape = f.shape
dsc = DSC(input_shape, self.kernel_size, self.extend_scope, self.morph) # 创建DSC对象
deformed_feature = dsc.deform_conv(f, offset, self.if_offset) # 进行可变形卷积
# 根据形态选择相应的卷积操作
if self.morph == 0:
x = self.dsc_conv_x(deformed_feature.type(f.dtype))
else:
x = self.dsc_conv_y(deformed_feature.type(f.dtype))
x = self.gn(x) # 组归一化
x = self.act(x) # 激活函数
return x动态蛇形卷积的核心部分
class DSC(object):
def init (self, input_shape, kernel_size, extend_scope, morph):
self.num_points = kernel_size # 卷积核的点数
self.width = input_shape2 # 输入特征图的宽度
self.height = input_shape3 # 输入特征图的高度
self.morph = morph # 卷积核形态
self.extend_scope = extend_scope # 偏移范围
# 定义特征图的形状
self.num_batch = input_shape[0] # 批量大小
self.num_channels = input_shape[1] # 通道数
def _coordinate_map_3D(self, offset, if_offset):
# 计算3D坐标图
device = offset.device
y_offset, x_offset = torch.split(offset, self.num_points, dim=1) # 分离y和x的偏移
# 生成y和x的中心坐标
y_center = torch.arange(0, self.width).repeat([self.height]).reshape(self.height, self.width).permute(1, 0).reshape([-1, self.width, self.height]).unsqueeze(0)
x_center = torch.arange(0, self.height).repeat([self.width]).reshape(self.width, self.height).permute(0, 1).reshape([-1, self.width, self.height]).unsqueeze(0)
# 根据形态初始化卷积核
if self.morph == 0:
y = torch.linspace(0, 0, 1)
x = torch.linspace(-int(self.num_points // 2), int(self.num_points // 2), int(self.num_points))
else:
y = torch.linspace(-int(self.num_points // 2), int(self.num_points // 2), int(self.num_points))
x = torch.linspace(0, 0, 1)
y, x = torch.meshgrid(y, x) # 生成网格
y_spread = y.reshape(-1, 1)
x_spread = x.reshape(-1, 1)
# 生成新的y和x坐标
y_grid = y_spread.repeat([1, self.width * self.height]).reshape([self.num_points, self.width, self.height]).unsqueeze(0)
x_grid = x_spread.repeat([1, self.width * self.height]).reshape([self.num_points, self.width, self.height]).unsqueeze(0)
y_new = y_center + y_grid
x_new = x_center + x_grid
# 处理偏移
if if_offset:
y_offset_new = y_offset.detach().clone()
center = int(self.num_points // 2)
y_offset_new[center] = 0
for index in range(1, center):
y_offset_new[center + index] = (y_offset_new[center + index - 1] + y_offset[center + index])
y_offset_new[center - index] = (y_offset_new[center - index + 1] + y_offset[center - index])
y_new = y_new.add(y_offset_new.mul(self.extend_scope))
# 返回新的y和x坐标
return y_new.reshape([self.num_batch, self.num_points, 1, self.width, self.height]).permute(0, 3, 1, 4, 2), x_new.reshape([self.num_batch, self.num_points, 1, self.width, self.height]).permute(0, 3, 1, 4, 2)
def _bilinear_interpolate_3D(self, input_feature, y, x):
# 进行3D双线性插值
device = input_feature.device
y = y.reshape([-1]).float()
x = x.reshape([-1]).float()
# 计算插值所需的坐标
y0 = torch.floor(y).int()
y1 = y0 + 1
x0 = torch.floor(x).int()
x1 = x0 + 1
# 限制坐标范围
max_y = self.width - 1
max_x = self.height - 1
y0 = torch.clamp(y0, 0, max_y)
y1 = torch.clamp(y1, 0, max_y)
x0 = torch.clamp(x0, 0, max_x)
x1 = torch.clamp(x1, 0, max_x)
# 获取8个网格值
input_feature_flat = input_feature.flatten().reshape(self.num_batch, self.num_channels, self.width, self.height).permute(0, 2, 3, 1).reshape(-1, self.num_channels)
dimension = self.height * self.width
base = torch.arange(self.num_batch) * dimension
base = base.reshape([-1, 1]).float()
# 计算插值
base_y0 = base + y0 * self.height
base_y1 = base + y1 * self.height
index_a0 = base_y0 - base + x0
index_c0 = base_y0 - base + x1
index_a1 = base_y1 - base + x0
index_c1 = base_y1 - base + x1
# 获取8个网格值
value_a0 = input_feature_flat[index_a0.type(torch.int64)].to(device)
value_c0 = input_feature_flat[index_c0.type(torch.int64)].to(device)
value_a1 = input_feature_flat[index_a1.type(torch.int64)].to(device)
value_c1 = input_feature_flat[index_c1.type(torch.int64)].to(device)
# 计算最终输出
outputs = (value_a0 * ((y1.float() - y) * (x1.float() - x).unsqueeze(-1).to(device)) +
value_c0 * ((y1.float() - y) * (x - x0.float()).unsqueeze(-1).to(device)) +
value_a1 * ((y - y0.float()) * (x1.float() - x).unsqueeze(-1).to(device)) +
value_c1 * ((y - y0.float()) * (x - x0.float()).unsqueeze(-1).to(device)))
# 根据形态调整输出形状
if self.morph == 0:
outputs = outputs.reshape([self.num_batch, self.num_points * self.width, 1 * self.height, self.num_channels]).permute(0, 3, 1, 2)
else:
outputs = outputs.reshape([self.num_batch, 1 * self.width, self.num_points * self.height, self.num_channels]).permute(0, 3, 1, 2)
return outputs
def deform_conv(self, input, offset, if_offset):
# 进行可变形卷积
y, x = self._coordinate_map_3D(offset, if_offset) # 计算坐标图
deformed_feature = self._bilinear_interpolate_3D(input, y, x) # 进行插值
return deformed_feature # 返回变形后的特征图代码核心部分分析
DySnakeConv 类是动态蛇形卷积的主要模块,包含三个卷积层:标准卷积和两个动态蛇形卷积(分别沿x轴和y轴)。
DSConv 类实现了动态蛇形卷积的具体逻辑,包括偏移学习、坐标计算和双线性插值。
DSC 类负责生成3D坐标图和执行双线性插值,完成输入特征图的变形处理。
关键功能
动态卷积:通过学习偏移量来实现特征图的动态变形。
双线性插值:在变形过程中,通过双线性插值方法来获取新的特征图值。
灵活性:可以根据不同的卷积核形态(x轴或y轴)来选择相应的卷积操作。
这个文件定义了一个动态蛇形卷积(Dynamic Snake Convolution)模块,主要由两个类构成:DySnakeConv 和 DSConv,以及一个辅助类 DSC。这些类结合了标准卷积和可变形卷积的思想,旨在通过动态调整卷积核的位置来提高特征提取的能力。
首先,DySnakeConv 类是一个神经网络模块,继承自 nn.Module。在其构造函数中,初始化了三个卷积层:conv_0 是一个标准卷积,conv_x 和 conv_y 是动态蛇形卷积,分别沿着 x 轴和 y 轴进行操作。forward 方法将输入数据 x 通过这三个卷积层处理后,将结果在通道维度上拼接起来,形成一个更丰富的特征表示。
接下来,DSConv 类实现了动态蛇形卷积的具体逻辑。构造函数中,定义了多个卷积层和参数,包括用于学习偏移量的卷积层 offset_conv,以及两个方向的卷积层 dsc_conv_x 和 dsc_conv_y。此外,还包括批归一化层和激活函数。forward 方法中,首先通过 offset_conv 计算出偏移量,然后使用 DSC 类生成的坐标图来进行可变形卷积操作,最后根据不同的形态(x 轴或 y 轴)返回处理后的特征。
DSC 类是一个辅助类,负责生成坐标图和进行双线性插值。它的构造函数接收输入形状、卷积核大小、扩展范围和形态参数。_coordinate_map_3D 方法根据偏移量生成新的坐标图,_bilinear_interpolate_3D 方法则根据生成的坐标图对输入特征进行双线性插值,得到变形后的特征图。deform_conv 方法是对外接口,调用前面的两个方法,完成从输入特征到变形特征的转换。
总体而言,这个文件实现了一个灵活的卷积模块,通过动态调整卷积核的位置来适应输入特征的形状,从而提高了卷积神经网络在处理复杂数据时的表现。
10.2 UniRepLKNet.py
以下是经过简化并添加详细中文注释的核心代码部分:
import torch
import torch.nn as nn
import torch.nn.functional as F
class GRNwithNHWC(nn.Module):
"""
GRN (Global Response Normalization) 层
该层用于对输入进行全局响应归一化,假设输入格式为 (N, H, W, C)
"""
def init (self, dim, use_bias=True):
super().init ()
self.use_bias = use_bias
gamma 和 beta 是可学习的参数
self.gamma = nn.Parameter(torch.zeros(1, 1, 1, dim))
if self.use_bias:
self.beta = nn.Parameter(torch.zeros(1, 1, 1, dim))
def forward(self, x):
# 计算输入的 L2 范数
Gx = torch.norm(x, p=2, dim=(1, 2), keepdim=True)
# 计算归一化因子
Nx = Gx / (Gx.mean(dim=-1, keepdim=True) + 1e-6)
if self.use_bias:
return (self.gamma * Nx + 1) * x + self.beta
else:
return (self.gamma * Nx + 1) * xclass UniRepLKNetBlock(nn.Module):
"""
UniRepLKNet 的基本模块
包含深度卷积、归一化、激活函数和 Squeeze-and-Excitation (SE) 块
"""
def init (self, dim, kernel_size, drop_path=0., deploy=False):
super().init ()
深度卷积层
self.dwconv = nn.Conv2d(dim, dim, kernel_size=kernel_size, stride=1, padding=kernel_size // 2, groups=dim)
归一化层
self.norm = nn.BatchNorm2d(dim)
Squeeze-and-Excitation 块
self.se = SEBlock(dim, dim // 4)
前馈网络
self.pwconv1 = nn.Linear(dim, dim * 4)
self.pwconv2 = nn.Linear(dim * 4, dim)
def forward(self, x):
# 深度卷积 + 归一化 + SE 块
y = self.se(self.norm(self.dwconv(x)))
# 前馈网络
y = self.pwconv2(F.gelu(self.pwconv1(y)))
return y + x # 残差连接class UniRepLKNet(nn.Module):
"""
UniRepLKNet 模型
包含多个 UniRepLKNetBlock 组成的阶段
"""
def init (self, in_chans=3, num_classes=1000, depths=(3, 3, 27, 3), dims=(96, 192, 384, 768)):
super().init ()
self.stages = nn.ModuleList()
for i in range(len(depths)):
每个阶段包含多个 UniRepLKNetBlock
stage = nn.Sequential(*UniRepLKNetBlock(dim=dims\[i, kernel_size=3) for _ in range(depthsi)])
self.stages.append(stage)
def forward(self, x):
for stage in self.stages:
x = stage(x) # 逐阶段前向传播
return x创建模型实例并进行前向传播
if name == 'main ':
inputs = torch.randn((1, 3, 640, 640)) # 随机输入
model = UniRepLKNet() # 实例化模型
res = model(inputs) # 前向传播
print(res.shape) # 输出结果的形状
代码说明:
GRNwithNHWC: 实现了全局响应归一化层,用于调整输入特征的响应。
UniRepLKNetBlock: 定义了模型的基本构建块,包含深度卷积、归一化、激活函数和 Squeeze-and-Excitation 块,使用残差连接来增强信息流动。
UniRepLKNet: 整个模型由多个 UniRepLKNetBlock 组成,按照给定的深度和维度进行堆叠,形成不同的阶段。
主程序: 创建模型实例并对随机输入进行前向传播,输出结果的形状。
这个程序文件 UniRepLKNet.py 实现了一个名为 UniRepLKNet 的深度学习模型,主要用于音频、视频、点云、时间序列和图像识别。该模型基于多个现有的深度学习框架和方法,包括 RepLKNet、ConvNeXt、timm、DINO 和 DeiT。文件中包含了多个类和函数,构成了模型的核心结构。
首先,文件导入了必要的库,包括 PyTorch 及其相关模块。接着,定义了一些基础组件,如 GRN(全局响应归一化)层、NCHW 和 NHWC 格式的转换层。这些组件在模型的不同部分中被重复使用,以提高代码的可读性和复用性。
get_conv2d 函数用于根据输入参数决定使用哪种卷积实现,支持原生卷积和高效的 iGEMM 大核卷积实现。get_bn 函数则根据是否使用同步批归一化返回相应的批归一化层。
接下来,定义了 Squeeze-and-Excitation Block(SEBlock),它通过自适应平均池化和两个卷积层来调整通道的权重,从而增强模型的表达能力。还有一些函数用于合并卷积层的批归一化参数,以及将膨胀卷积转换为非膨胀卷积。
DilatedReparamBlock 类实现了膨胀重参数化块,允许在不同的卷积核大小和膨胀率下进行卷积操作。这个类的设计使得模型在推理时能够高效地使用大核卷积。
UniRepLKNetBlock 类是模型的基本构建块,包含了卷积层、归一化层、SEBlock 和前馈网络。它支持不同的配置,如是否启用随机深度、是否使用层缩放等。
UniRepLKNet 类则是整个模型的主体,负责构建不同的层和块,并定义前向传播的逻辑。模型的初始化参数包括输入通道数、类别数、每个阶段的深度和特征维度等。模型支持多种输出模式,如返回特征或分类结果。
最后,文件提供了一些函数,用于创建不同配置的 UniRepLKNet 模型实例,并加载预训练权重。主程序部分演示了如何创建模型实例并进行推理。
整体而言,UniRepLKNet.py 文件通过模块化的设计和灵活的参数配置,提供了一个强大的深度学习模型框架,适用于多种视觉和非视觉任务。
10.3 val.py
以下是代码中最核心的部分,并附上详细的中文注释:
class DetectionValidator(BaseValidator):
"""
扩展自 BaseValidator 类的检测模型验证器。
"""
def __init__(self, dataloader=None, save_dir=None, pbar=None, args=None, _callbacks=None):
"""初始化检测模型所需的变量和设置。"""
super().__init__(dataloader, save_dir, pbar, args, _callbacks)
self.nt_per_class = None # 每个类别的目标数量
self.is_coco = False # 是否为 COCO 数据集
self.class_map = None # 类别映射
self.args.task = "detect" # 任务类型设置为检测
self.metrics = DetMetrics(save_dir=self.save_dir, on_plot=self.on_plot) # 初始化检测指标
self.iouv = torch.linspace(0.5, 0.95, 10) # mAP@0.5:0.95 的 IoU 向量
self.niou = self.iouv.numel() # IoU 的数量
self.lb = [] # 用于自动标记
def preprocess(self, batch):
"""对 YOLO 训练的图像批次进行预处理。"""
# 将图像移动到设备上并进行归一化处理
batch["img"] = batch["img"].to(self.device, non_blocking=True)
batch["img"] = (batch["img"].half() if self.args.half else batch["img"].float()) / 255
for k in ["batch_idx", "cls", "bboxes"]:
batch[k] = batch[k].to(self.device)
# 如果需要保存混合数据,进行相应处理
if self.args.save_hybrid:
height, width = batch["img"].shape[2:]
nb = len(batch["img"])
bboxes = batch["bboxes"] * torch.tensor((width, height, width, height), device=self.device)
self.lb = (
[
torch.cat([batch["cls"][batch["batch_idx"] == i], bboxes[batch["batch_idx"] == i]], dim=-1)
for i in range(nb)
]
if self.args.save_hybrid
else []
) # 用于自动标记
return batch
def postprocess(self, preds):
"""对预测输出应用非极大值抑制。"""
return ops.non_max_suppression(
preds,
self.args.conf,
self.args.iou,
labels=self.lb,
multi_label=True,
agnostic=self.args.single_cls,
max_det=self.args.max_det,
)
def update_metrics(self, preds, batch):
"""更新指标统计信息。"""
for si, pred in enumerate(preds):
self.seen += 1 # 记录已处理的图像数量
npr = len(pred) # 当前预测的数量
stat = dict(
conf=torch.zeros(0, device=self.device),
pred_cls=torch.zeros(0, device=self.device),
tp=torch.zeros(npr, self.niou, dtype=torch.bool, device=self.device),
)
pbatch = self._prepare_batch(si, batch) # 准备当前批次的标签
cls, bbox = pbatch.pop("cls"), pbatch.pop("bbox") # 获取真实标签
nl = len(cls) # 真实标签数量
stat["target_cls"] = cls # 记录真实类别
if npr == 0: # 如果没有预测
if nl:
for k in self.stats.keys():
self.stats[k].append(stat[k])
continue
# 处理预测
if self.args.single_cls:
pred[:, 5] = 0 # 如果是单类检测,设置类别为0
predn = self._prepare_pred(pred, pbatch) # 准备预测数据
stat["conf"] = predn[:, 4] # 置信度
stat["pred_cls"] = predn[:, 5] # 预测类别
# 评估
if nl:
stat["tp"] = self._process_batch(predn, bbox, cls) # 计算真正例
for k in self.stats.keys():
self.stats[k].append(stat[k]) # 更新统计信息
def get_stats(self):
"""返回指标统计信息和结果字典。"""
stats = {k: torch.cat(v, 0).cpu().numpy() for k, v in self.stats.items()} # 转换为 numpy 数组
if len(stats) and stats["tp"].any():
self.metrics.process(**stats) # 处理指标
self.nt_per_class = np.bincount(
stats["target_cls"].astype(int), minlength=self.nc
) # 计算每个类别的目标数量
return self.metrics.results_dict # 返回结果字典代码核心部分说明:
DetectionValidator 类:这是一个用于检测模型验证的类,继承自 BaseValidator,包含了初始化、预处理、后处理、指标更新等多个方法。
初始化方法:设置了一些必要的变量和参数,包括任务类型、指标对象等。
预处理方法:对输入的图像批次进行处理,包括设备转移和归一化,并根据需要进行混合数据的处理。
后处理方法:应用非极大值抑制,过滤掉冗余的预测框。
更新指标方法:在每个批次中更新检测指标,包括计算真正例、更新统计信息等。
获取统计信息方法:返回检测结果的统计信息,计算每个类别的目标数量。
这些核心部分构成了检测模型验证的基础,确保了模型在验证集上的性能评估。
这个程序文件 val.py 是一个用于验证目标检测模型(如 YOLO)的类 DetectionValidator 的实现。该类继承自 BaseValidator,并提供了一系列方法来处理数据、计算指标和输出结果。
在初始化时,DetectionValidator 接收一些参数,如数据加载器、保存目录、进度条、参数字典等。它设置了一些用于验证的变量,例如 nt_per_class(每个类别的目标数量)、is_coco(是否使用 COCO 数据集)、class_map(类别映射)等。同时,它还初始化了一些评估指标,如 DetMetrics 和混淆矩阵 ConfusionMatrix。
preprocess 方法用于对输入的图像批次进行预处理,包括将图像数据转移到设备上、调整数据类型和归一化处理。若设置了保存混合标签的选项,还会生成用于自动标注的标签。
init_metrics 方法初始化评估指标,检查数据集是否为 COCO 格式,并设置相应的类别映射和名称。
postprocess 方法对模型的预测结果应用非极大值抑制(NMS),以减少重叠的检测框。
_prepare_batch 和 _prepare_pred 方法分别用于准备输入批次和预测结果,以便后续的评估和计算。
update_metrics 方法负责更新模型的评估指标,包括处理每个批次的预测结果和真实标签,计算正确预测的数量,并将结果保存到指定的文件中。
finalize_metrics 方法用于设置最终的指标值和混淆矩阵。
get_stats 方法返回当前的指标统计信息,并计算每个类别的目标数量。
print_results 方法输出训练或验证集的每个类别的指标结果,包括图像数量、实例数量和各类指标的平均值。
_process_batch 方法用于计算正确预测的矩阵,返回每个预测框与真实框的 IoU 值。
build_dataset 和 get_dataloader 方法用于构建数据集和数据加载器,以便在验证过程中使用。
plot_val_samples 和 plot_predictions 方法用于可视化验证样本和预测结果,生成相应的图像文件。
save_one_txt 方法将 YOLO 检测结果保存到文本文件中,格式为归一化坐标。
pred_to_json 方法将预测结果序列化为 COCO JSON 格式,以便后续评估。
eval_json 方法用于评估 YOLO 输出的 JSON 格式结果,并返回性能统计信息,使用 COCO API 计算 mAP(平均精度)。
整体而言,这个文件实现了一个完整的目标检测模型验证流程,包括数据处理、指标计算、结果输出和可视化,适用于使用 YOLO 模型进行目标检测的场景。
10.4 fast_kan_conv.py
以下是经过简化和注释的核心代码部分:
import torch
import torch.nn as nn
定义径向基函数(Radial Basis Function)类
class RadialBasisFunction(nn.Module):
def init (self, grid_min: float = -2., grid_max: float = 2., num_grids: int = 8, denominator: float = None):
super().init ()
在指定范围内生成均匀分布的网格点
grid = torch.linspace(grid_min, grid_max, num_grids)
self.grid = torch.nn.Parameter(grid, requires_grad=False) # 将网格点设为不可训练的参数
设置分母,用于控制基函数的平滑度
self.denominator = denominator or (grid_max - grid_min) / (num_grids - 1)
def forward(self, x):
# 计算径向基函数的输出
return torch.exp(-((x[..., None] - self.grid) / self.denominator) ** 2)定义快速KAN卷积层的基类
class FastKANConvNDLayer(nn.Module):
def init (self, conv_class, norm_class, input_dim, output_dim, kernel_size, groups=1, padding=0, stride=1, dilation=1, ndim: int = 2, grid_size=8, base_activation=nn.SiLU, grid_range=-2, 2, dropout=0.0):
super(FastKANConvNDLayer, self).init ()
初始化卷积层的参数
self.inputdim = input_dim
self.outdim = output_dim
self.kernel_size = kernel_size
self.padding = padding
self.stride = stride
self.dilation = dilation
self.groups = groups
self.ndim = ndim
self.grid_size = grid_size
self.base_activation = base_activation() # 基础激活函数
self.grid_range = grid_range
# 检查输入参数的有效性
if groups <= 0:
raise ValueError('groups must be a positive integer')
if input_dim % groups != 0:
raise ValueError('input_dim must be divisible by groups')
if output_dim % groups != 0:
raise ValueError('output_dim must be divisible by groups')
# 创建基础卷积层和样条卷积层
self.base_conv = nn.ModuleList([conv_class(input_dim // groups, output_dim // groups, kernel_size, stride, padding, dilation, groups=1, bias=False) for _ in range(groups)])
self.spline_conv = nn.ModuleList([conv_class(grid_size * input_dim // groups, output_dim // groups, kernel_size, stride, padding, dilation, groups=1, bias=False) for _ in range(groups)])
self.layer_norm = nn.ModuleList([norm_class(output_dim // groups) for _ in range(groups)])
# 初始化径向基函数
self.rbf = RadialBasisFunction(grid_range[0], grid_range[1], grid_size)
# 初始化dropout层
self.dropout = nn.Dropout(p=dropout) if dropout > 0 else None
# 使用Kaiming均匀分布初始化卷积层的权重
for conv_layer in self.base_conv:
nn.init.kaiming_uniform_(conv_layer.weight, nonlinearity='linear')
for conv_layer in self.spline_conv:
nn.init.kaiming_uniform_(conv_layer.weight, nonlinearity='linear')
def forward_fast_kan(self, x, group_index):
# 快速KAN卷积的前向传播
base_output = self.base_conv[group_index](self.base_activation(x)) # 应用基础激活和卷积
if self.dropout is not None:
x = self.dropout(x) # 应用dropout
spline_basis = self.rbf(self.layer_norm[group_index](x)) # 计算样条基
spline_basis = spline_basis.moveaxis(-1, 2).flatten(1, 2) # 调整维度以适应卷积层
spline_output = self.spline_conv[group_index](spline_basis) # 应用样条卷积
x = base_output + spline_output # 合并基础输出和样条输出
return x
def forward(self, x):
# 对输入进行分组并进行前向传播
split_x = torch.split(x, self.inputdim // self.groups, dim=1)
output = []
for group_ind, _x in enumerate(split_x):
y = self.forward_fast_kan(_x.clone(), group_ind) # 调用快速KAN卷积
output.append(y.clone())
y = torch.cat(output, dim=1) # 合并所有组的输出
return y代码说明:
RadialBasisFunction:实现了径向基函数,主要用于生成平滑的基函数输出。
FastKANConvNDLayer:是一个卷积层的基类,支持多维卷积(1D、2D、3D),包括基础卷积和样条卷积。
forward_fast_kan:实现了快速KAN卷积的前向传播逻辑,计算基础卷积和样条卷积的输出并合并。
forward:处理输入数据的分组,并调用forward_fast_kan进行计算,最后合并输出。
这个程序文件定义了一个用于快速卷积神经网络的模块,主要包含了几个类,分别用于实现不同维度的卷积层。首先,RadialBasisFunction类实现了一个径向基函数,主要用于生成平滑的基函数。它的构造函数接受最小和最大网格值、网格数量以及分母值。forward方法计算输入与网格之间的距离,并通过指数函数生成径向基函数的输出。
接下来,FastKANConvNDLayer类是一个通用的多维卷积层,继承自nn.Module。在其构造函数中,定义了输入和输出维度、卷积核大小、分组数、填充、步幅、扩张、网格大小等参数,并进行了一系列的参数验证。该类使用ModuleList来存储基础卷积层、样条卷积层和层归一化层,并初始化了一个径向基函数实例。根据给定的维度,可能会添加丢弃层以防止过拟合。卷积层的权重使用Kaiming均匀分布进行初始化,以提高训练的起始效果。
forward_fast_kan方法是该类的核心功能,处理输入数据并通过基础卷积和样条卷积生成输出。输入数据首先经过基础激活函数,然后进行线性变换。接着,样条基函数通过层归一化处理后进行卷积,最后将基础输出和样条输出相加得到最终结果。
forward方法则将输入数据按照分组进行拆分,并对每个分组调用forward_fast_kan进行处理,最后将所有输出拼接在一起。
文件中还定义了三个具体的卷积层类:FastKANConv3DLayer、FastKANConv2DLayer和FastKANConv1DLayer,分别用于三维、二维和一维卷积操作。这些类通过调用FastKANConvNDLayer的构造函数来初始化相应的卷积层,指定相应的卷积类型和归一化类型。
整体而言,这个程序文件实现了一个灵活且高效的卷积神经网络模块,能够支持多维卷积操作,并通过径向基函数增强模型的表达能力。
源码文件
源码获取
欢迎大家点赞、收藏、关注、评论 啦 、查看👇🏻获取联系方式👇🏻