1. 引言:实时进程调度的"刚性需求"与"隐形陷阱"
在Linux系统中,实时进程(如工业控制、自动驾驶中的任务)的核心诉求是"确定性响应"------必须在严格的时间约束内完成执行,否则可能导致设备故障甚至安全事故。Linux通过SCHED_FIFO和SCHED_RR两种实时调度策略,为实时进程提供"优先级驱动"的调度保障,但这种机制存在一个致命缺陷------优先级反转(Priority Inversion)。
优先级反转是"高优先级进程因等待低优先级进程持有的资源,导致中等优先级进程抢占CPU"的异常现象。这种现象会彻底破坏实时系统的时间确定性,是实时应用开发中必须解决的核心问题。从"优先级反转的原理"、"内核解决方案"、"实践应用"三个维度,系统解析Linux实时进程调度的痛点与应对策略。
Linux 2.6系列内核通过"实时互斥量(RT-Mutex)"和"优先级继承(Priority Inheritance)"机制,从内核层面解决了优先级反转问题,使实时进程的调度延迟可控------这是Linux能够应用于软实时场景的关键改进。
2. 优先级反转:实时调度的"隐形陷阱"
要理解优先级反转,首先需要明确Linux实时进程的调度特性。实时进程的优先级(rt_priority)范围为0-99,值越大优先级越高;SCHED_FIFO进程一旦获得CPU将持续运行,直至主动放弃或被更高优先级进程抢占;SCHED_RR进程则通过时间片轮转,确保同优先级进程公平执行。而优先级反转,正是在"优先级抢占"与"资源共享"的交叉场景中产生。
2.1 优先级反转的原理:三进程场景解析
通过经典的"三进程场景",清晰揭示了优先级反转的产生过程。假设系统中存在三个实时进程,优先级从高到低依次为:
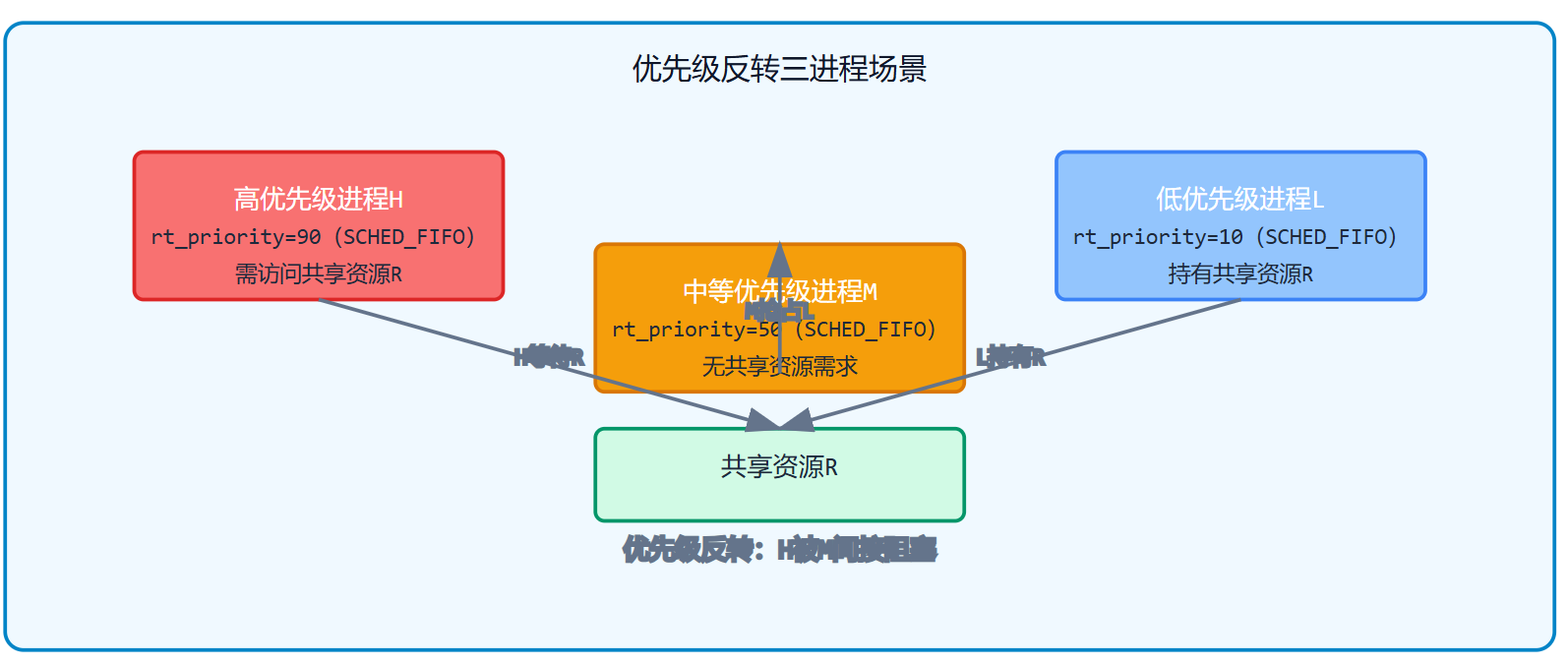
- 高优先级进程(H) :
SCHED_FIFO策略,rt_priority=90,需访问共享资源R; - 中等优先级进程(M) :
SCHED_FIFO策略,rt_priority=50,无共享资源需求; - 低优先级进程(L) :
SCHED_FIFO策略,rt_priority=10,持有共享资源R。
场景演化过程
- 初始状态:低优先级进程L持有资源R,正在执行;
- H就绪触发抢占:高优先级进程H进入就绪态,根据实时调度规则,H抢占L的CPU,开始执行;
- H等待资源阻塞:H执行到需访问资源R的代码,发现R被L持有,进入阻塞态,释放CPU;
- 优先级反转发生:CPU调度权回到L,但此时中等优先级进程M进入就绪态------由于M优先级高于L,M抢占L的CPU并持续执行;
- H长期等待:M无资源需求,持续占用CPU,导致L无法继续执行以释放资源R,H则因等待R长期阻塞,直至M执行完成。
问题核心:高优先级进程H的执行被中等优先级进程M"间接阻塞",违背了"高优先级进程优先执行"的实时调度原则,导致H的响应时间超出预期。
2.2 优先级反转的危害:实时系统的"定时炸弹"
优先级反转对实时系统的危害主要体现在两个方面:
- 破坏时间确定性:实时进程的响应时间不再仅由自身优先级决定,而是受无关进程(如场景中的M)影响,导致无法预估执行完成时间;
- 引发系统故障:在强实时场景(如自动驾驶的刹车控制)中,高优先级进程的延迟可能导致设备失控------例如,刹车控制进程H若因反转延迟100ms,可能错过刹车时机。
未解决优先级反转的实时系统,本质上不具备"实时性"------即使进程优先级设置合理,也可能因资源竞争导致不可控的延迟。
2.3 反转产生的根源:资源竞争与调度策略的冲突
从内核视角分析,优先级反转的产生源于两个核心机制的冲突:
- 调度策略的"优先级驱动":实时调度器仅根据进程优先级决定调度顺序,不考虑进程是否持有其他进程所需的资源;
- 资源同步的"无优先级感知" :传统的互斥锁(如
spinlock_t、mutex_t)仅保证资源独占访问,不感知进程优先级,无法将低优先级进程的资源持有状态传递给高优先级进程。
要解决优先级反转,必须从内核层面修改"资源同步机制",使锁具备"优先级感知"能力------这正是Linux实时互斥量(RT-Mutex)的设计初衷。
3. Linux内核的解决方案:实时互斥量与优先级继承
通过实时互斥量(RT-Mutex) 实现**优先级继承(Priority Inheritance)**机制。其核心思想是:"当高优先级进程等待低优先级进程持有的锁时,临时将低优先级进程的优先级提升至高优先级进程的级别",避免中等优先级进程抢占,从而快速释放锁资源。
3.1 实时互斥量的核心设计:优先级感知的锁机制
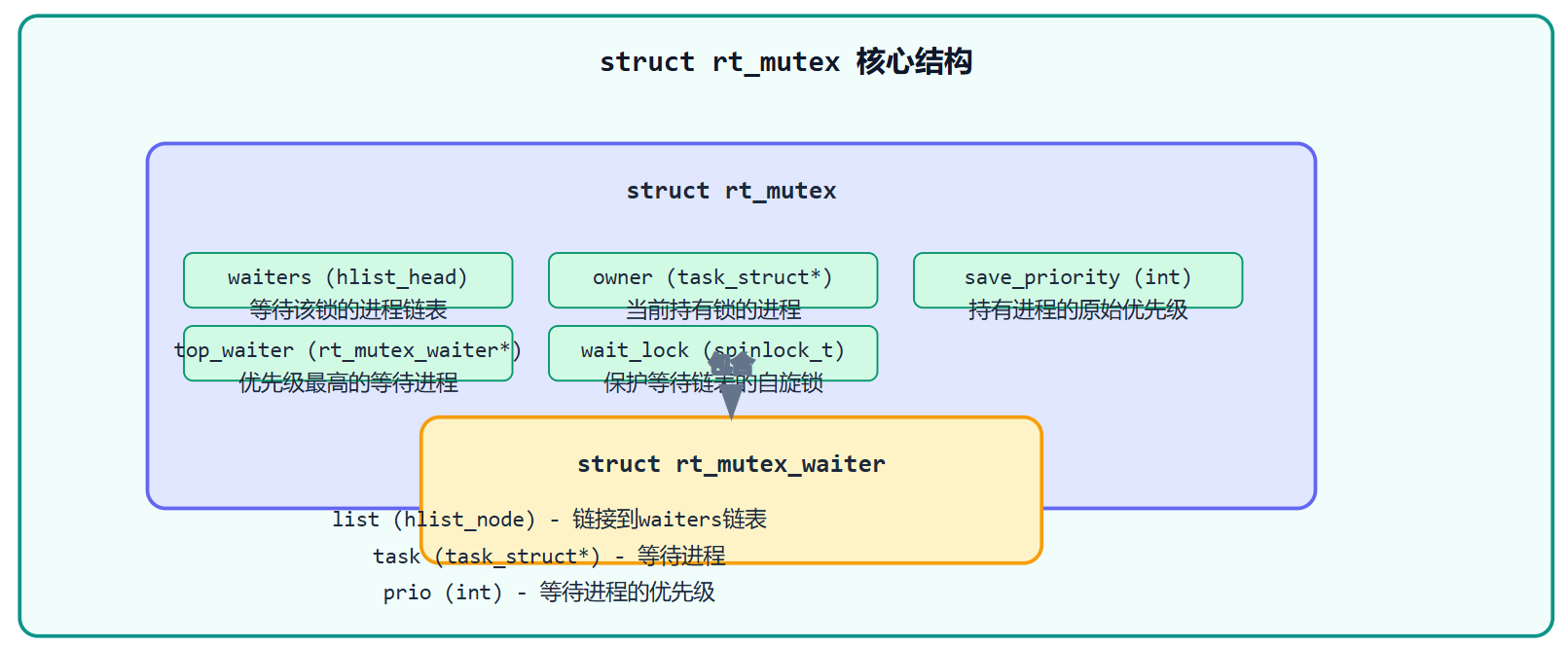
实时互斥量是传统互斥锁的增强版,定义其核心数据结构(struct rt_mutex)如下(简化版):
// 实时互斥量结构
struct rt_mutex {
struct hlist_head waiters; // 等待该锁的进程链表
struct task_struct *owner; // 当前持有锁的进程
int save_priority; // 持有进程的原始优先级(用于恢复)
struct rt_mutex_waiter *top_waiter; // 优先级最高的等待进程
spinlock_t wait_lock; // 保护等待链表的自旋锁
};
// 等待者结构(记录等待进程的优先级信息)
struct rt_mutex_waiter {
struct hlist_node list; // 链接到rt_mutex的waiters链表
struct task_struct *task; // 等待进程
struct rt_mutex *lock; // 对应的实时互斥量
int prio; // 等待进程的优先级
};与传统互斥锁相比,实时互斥量增加了三个关键特性:
- 等待者优先级跟踪 :通过
waiters链表和top_waiter,记录并快速定位优先级最高的等待进程; - 持有进程优先级保存 :
save_priority存储持有进程的原始优先级,便于锁释放后恢复; - 动态优先级调整:在高优先级进程等待锁时,自动将持有进程的优先级提升至等待进程的级别。
3.2 优先级继承的执行流程:以三进程场景为例
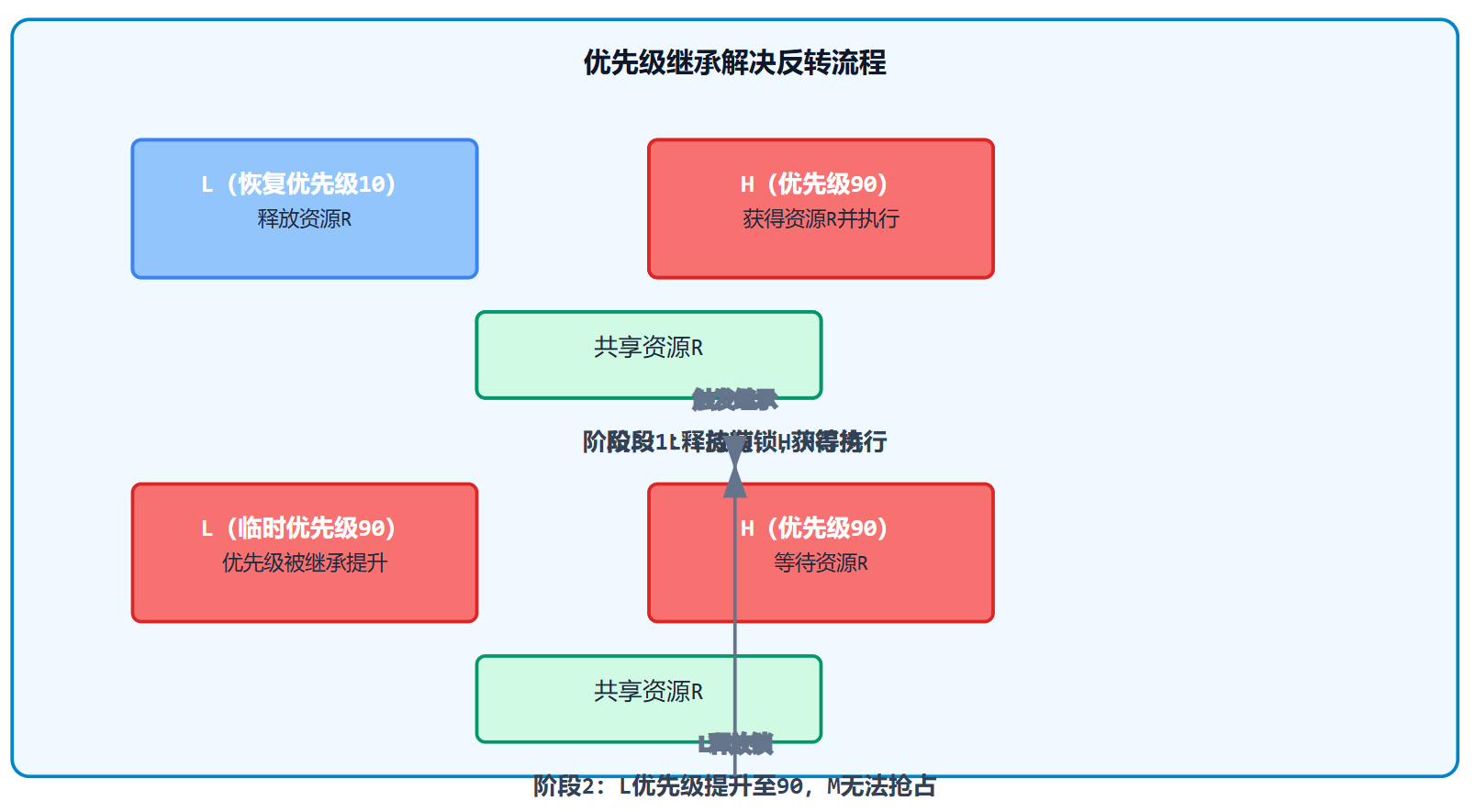
基于前文的三进程场景(H、M、L),优先级继承机制如何解决反转问题,步骤如下:
- L持有锁,H等待触发继承 :H执行到访问资源R的代码,调用
rt_mutex_lock申请实时互斥量------内核检测到锁被L持有,且H优先级高于L,触发优先级继承; - 提升L的优先级 :内核将L的优先级临时提升至H的级别(90),并保存L的原始优先级(10)到
rt_mutex->save_priority; - 阻止M抢占:此时M进入就绪态,但因L的临时优先级(90)高于M(50),M无法抢占L的CPU,L继续执行;
- L释放锁,恢复优先级 :L执行完成并释放锁(调用
rt_mutex_unlock),内核将L的优先级恢复为原始值(10); - H获得锁执行:H从阻塞态唤醒,获得锁R并执行,M则在H释放CPU后再执行。
关键改进:通过优先级继承,中等优先级进程M无法抢占L,L能快速释放锁资源,H的等待时间仅取决于L释放锁的耗时,而非M的执行时间------彻底解决了优先级反转导致的不可控延迟。
3.3 实时互斥量的API:内核中的使用方式
实时互斥量的核心API,内核开发者可通过这些接口在实时进程中避免优先级反转:
| API函数 | 功能描述 | 使用场景 |
|---|---|---|
rt_mutex_init(struct rt_mutex *lock) |
初始化实时互斥量,设置owner=NULL,初始化等待链表 |
模块初始化时,初始化共享资源对应的锁 |
rt_mutex_lock(struct rt_mutex *lock) |
申请锁:若锁未被持有则直接获取;否则阻塞并触发优先级继承 | 实时进程访问共享资源前调用 |
rt_mutex_unlock(struct rt_mutex *lock) |
释放锁:唤醒优先级最高的等待进程,恢复持有进程的原始优先级 | 实时进程访问共享资源后调用 |
rt_mutex_trylock(struct rt_mutex *lock) |
尝试申请锁:若锁已被持有则立即返回失败,不阻塞 | 非阻塞场景,避免进程因等待锁而延迟 |
以下是实时互斥量在实时进程中的使用示例:
// 1. 定义共享资源与实时互斥量
struct shared_resource {
int data; // 共享数据
struct rt_mutex lock; // 保护共享数据的实时互斥量
};
struct shared_resource res;
// 2. 初始化共享资源(模块初始化时)
static int __init rt_resource_init(void) {
res.data = 0;
rt_mutex_init(&res.lock); // 初始化实时互斥量
return 0;
}
module_init(rt_resource_init);
// 3. 高优先级进程H的代码(访问共享资源)
void high_prio_task(void) {
// 申请实时互斥量(触发优先级继承)
rt_mutex_lock(&res.lock);
// 访问共享资源
res.data += 1;
printk(KERN_INFO "High prio task: res.data = %d\n", res.data);
// 释放锁(恢复持有进程优先级)
rt_mutex_unlock(&res.lock);
}
// 4. 低优先级进程L的代码(持有共享资源)
void low_prio_task(void) {
// 申请实时互斥量
rt_mutex_lock(&res.lock);
// 模拟耗时操作(持有锁期间)
msleep(100); // 睡眠100ms,期间若H等待则触发优先级继承
res.data *= 2;
printk(KERN_INFO "Low prio task: res.data = %d\n", res.data);
// 释放锁
rt_mutex_unlock(&res.lock);
}3.4 进阶优化:优先级天花板协议
除优先级继承外,Linux内核还支持**优先级天花板协议(Priority Ceiling Protocol)**作为补充方案。其核心思想是:"将共享资源的'优先级天花板'(即所有可能访问该资源的进程中的最高优先级)预先分配给锁,任何持有该锁的进程,优先级都会被提升至天花板级别"。
与优先级继承的区别在于:优先级天花板协议是"预先提升",无需等待高优先级进程触发;而优先级继承是"按需提升",仅在高优先级进程等待时才调整。两种方案各有适用场景:
- 优先级继承:适用于资源竞争频率低的场景,优点是"无竞争时无优先级提升开销";
- 优先级天花板:适用于资源竞争频繁的场景,优点是"避免多次优先级调整",但可能导致不必要的优先级提升。
Linux内核通过rt_mutex_setprioceiling函数支持优先级天花板协议,开发者可根据场景选择合适的方案。
4. 实践应用:实时进程调度的最佳实践
结合实际开发经验,实时进程调度的最佳实践可归纳为以下几点,确保系统既避免优先级反转,又具备良好的实时性。
4.1 锁选择:优先使用实时互斥量
实时进程访问共享资源时,必须使用实时互斥量(rt_mutex),而非传统互斥锁(mutex_t)或自旋锁(spinlock_t)。原因如下:
mutex_t:无优先级感知能力,会导致优先级反转;spinlock_t:适用于内核临界区(中断上下文),实时进程若持有自旋锁进入睡眠,会导致系统死锁;rt_mutex:具备优先级继承能力,专为实时进程的资源同步设计。
常见误区 :部分开发者在实时进程中使用pthread_mutex_t(用户空间互斥锁),但标准pthread_mutex_t不支持优先级继承------需使用PTHREAD_MUTEX_ROBUST_NP属性创建支持优先级继承的用户空间互斥锁,或直接通过系统调用使用内核实时互斥量。
4.2 优先级配置:合理划分优先级范围
实时进程的优先级配置应遵循"分层原则",避免优先级冲突:
- 核心实时任务 :优先级设置为80-99(
SCHED_FIFO),如刹车控制、数据采集任务; - 辅助实时任务 :优先级设置为40-79(
SCHED_RR),如数据预处理、日志记录任务; - 非实时任务 :使用
SCHED_NORMAL策略,nice值设置为0-19,避免占用实时进程的CPU资源。
以下是通过sched_setscheduler设置实时进程优先级的示例:
// 设置进程为SCHED_FIFO实时策略,优先级90
int set_realtime_prio(pid_t pid) {
struct sched_param param;
int ret;
// 初始化实时调度参数
param.sched_priority = 90; // 优先级90(0-99)
// 设置调度策略:SCHED_FIFO
ret = sched_setscheduler(pid, SCHED_FIFO, ¶m);
if (ret < 0) {
printk(KERN_ERR "Failed to set realtime scheduler: %d\n", errno);
return ret;
}
return 0;
}4.3 资源管理:减少共享资源竞争
优先级反转的根本原因是"资源竞争",因此减少共享资源的使用是预防反转的最有效手段:
- 资源拆分:将大的共享资源拆分为多个独立的小资源,减少进程持有锁的时间;
- 锁粒度优化:仅在必要的代码段持有锁,避免"锁持有时间过长"(如持有锁期间执行耗时的IO操作);
- 无锁设计 :对只读共享数据,使用
rcu_read_lock(RCU机制)实现无锁访问,避免锁竞争。
4.4 系统配置:启用内核实时特性
要充分发挥Linux的实时能力,需在编译内核时启用以下配置选项:
CONFIG_PREEMPT_RT:启用实时抢占内核,减少内核态执行的延迟;CONFIG_RT_MUTEXES:启用实时互斥量支持(2.6系列内核默认启用);CONFIG_HIGH_RES_TIMERS:启用高分辨率定时器,提供纳秒级的时间精度;CONFIG_NO_HZ_FULL:禁用指定CPU的周期性时钟中断,减少调度器的干扰。
5. 总结:Linux实时调度的"确定性"保障
Linux实时进程调度的核心挑战是"优先级反转",而内核通过"实时互斥量+优先级继承"机制,从根本上解决了这一问题。这种解决方案的设计哲学是:在"优先级驱动调度"与"资源共享"之间找到平衡,通过动态优先级调整,确保高优先级进程的执行不受无关进程干扰。
对于实时系统开发者而言,关键启示在于:
- 锁选择是基础:实时进程的共享资源同步必须使用实时互斥量,避免优先级反转;
- 优先级配置是关键:合理划分优先级范围,避免高、中、低优先级进程的调度冲突;
- 系统优化是保障:启用内核实时特性,减少内核态延迟,提升系统的时间确定性。
Linux虽然不支持硬实时(无法保证绝对的时间约束),但通过优先级继承、实时抢占等机制,已能满足绝大多数软实时场景(如工业控制、多媒体处理)的需求。理解并正确应用这些机制,是开发高性能实时Linux应用的核心前提。