一、卷积过程参数计算
重要公式:O=(I-K+2P)/S + 1,O是输出尺寸,I是输入尺寸,K是卷积核尺寸,P是padding,S是步长,向下取整。
例1.特征图3*4*4,padding=1,卷积核数量是1,卷出来的特征图为1*4*4,问卷积核多大,卷积核的参数量是多少
分析:特征图是三通道,大小为4,根据重要公式,可以计算出卷积核的大小为3,又因为是在三通道上做卷积,故卷积核也是三通道的,所以卷积核是3*3*3的大小,参数量是27
例2.特征图3*4*4,卷积核3*3*3,padding=1,卷积核数量7,卷出来的特征图多大
分析:根据重要公式得,卷出来的特征图大小为4,又因为卷积核的数量为7,由于卷积核的数量等于输出特征图的数量。故卷出来的特征图大小为7*4*4
例三.特征图64*224*224,卷积核64*3*3,padding=1,卷积核数量128,卷出来特征图多大。这套卷积核的参数量是多少
分析:根据重要公式可以计算出卷出来的特征图尺寸大小为224,由于卷积核数量等于输出特征图的数量,故卷出来的特征图大小为128*224*224。这套卷积核的参数量是128*64*3*3
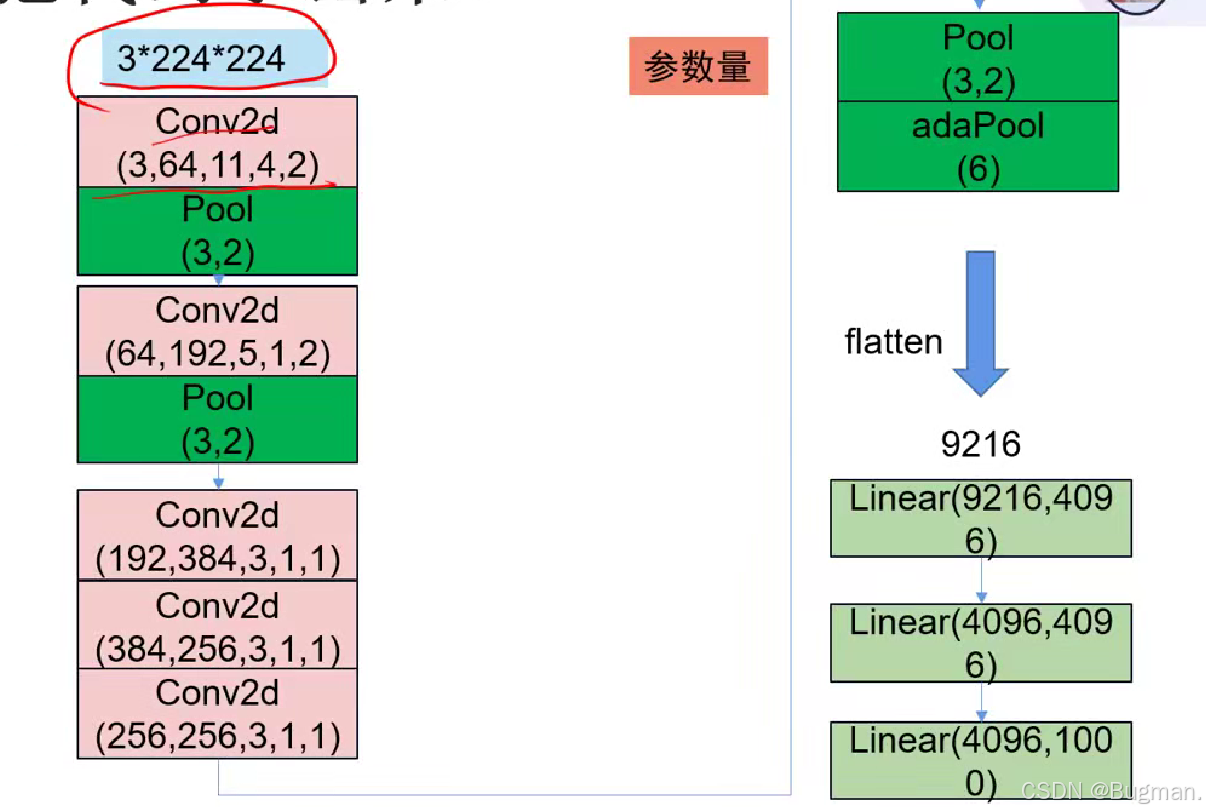
二、AlexNet实现
python
import torch
from torch.nn import Sequential, Conv2d, MaxPool2d, AdaptiveMaxPool2d, Flatten, Linear
class MyAlexNet:
def __init__(self, num_class):
super(MyAlexNet, self).__init__()
self.features = Sequential(
Conv2d(3, 64, 11, 4, 2),
MaxPool2d(3, 2),
Conv2d(64, 192, 5, 1, 2),
MaxPool2d(3, 2),
Conv2d(192, 384, 3, 1, 1),
Conv2d(384, 256, 3, 1, 1),
Conv2d(256, 256, 3, 1, 1),
MaxPool2d(3, 2)
)
self.classifier = Sequential(
AdaptiveMaxPool2d(6),
Flatten(),
Linear(9216, 4096),
Linear(4096, 4096),
Linear(4096, num_class)
)
def forward(self, x):
x = self.features(x)
x = x.view(x.size(0), 9216)
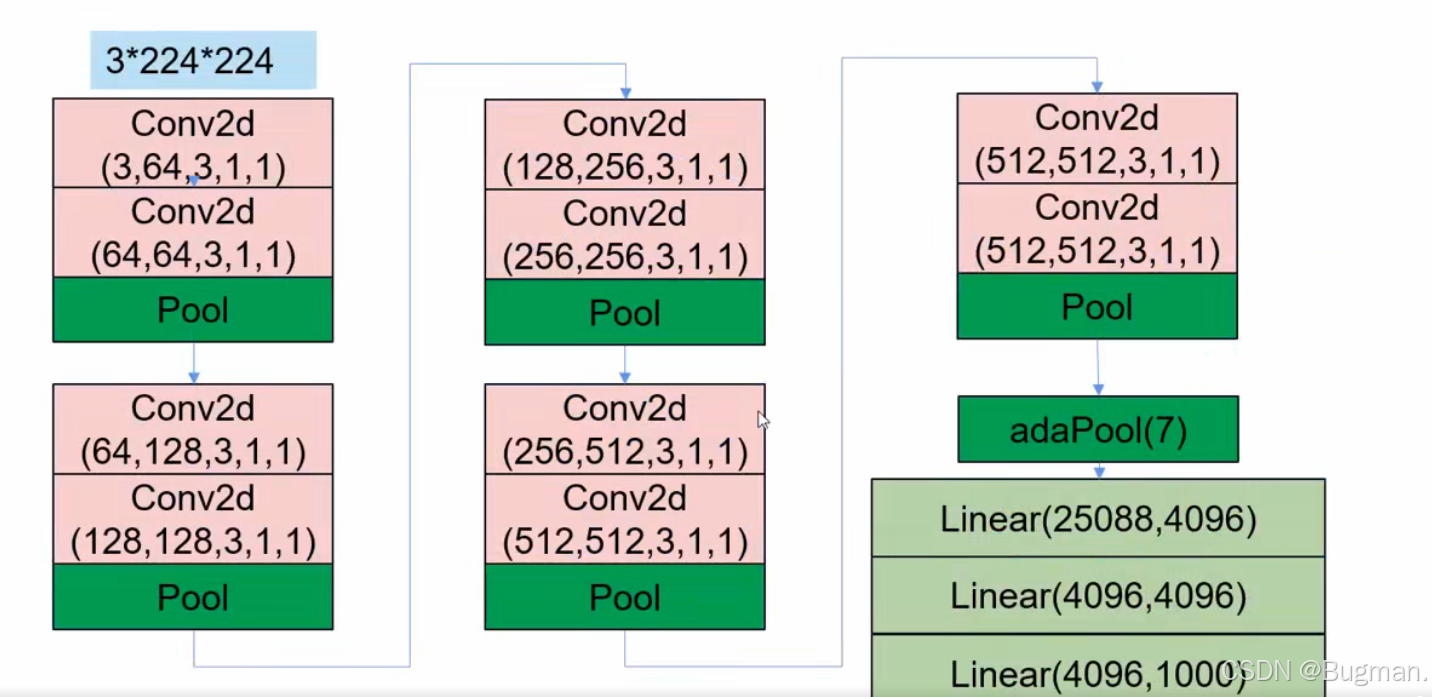
x = self.classifier(x)三、VGGNet实现
VGGNet网络的特点是用小参数代替大参数,我们这里分析VGG网络每一层的参数量,并且实现网络
python
import torch
from torch import nn
from torch.nn import Sequential, Conv2d, MaxPool2d, AdaptiveMaxPool2d, Flatten, Linear
class MyVGG(nn.Module):
def __init__(self, num_class=1000):
super(MyVGG, self).__init__()
self.features = Sequential(
# 输入3*224*224大小的特征图
Conv2d(3, 64, 3, 1, 1), # 参数量64*3*3*3+64 特征图大小为64*224*224
# (+64是因为64个卷积核每一个都有一个偏置)
Conv2d(64, 64, 3, 1, 1), # 参数量64*64*3*3+64 特征图大小为64*224*224
MaxPool2d(2), # 特征图大小为64*112*112
Conv2d(64, 128, 3, 1, 1), # 参数量128*64*3*3+128 特征图大小为128*112*112
Conv2d(128, 128, 3, 1, 1), # 参数量 128*128*3*3+128 特征图大小为128*112*112
MaxPool2d(2), # 特征图大小为128*56*56
Conv2d(128, 256, 3, 1, 1), # 参数量256*128*3*3+256 特征图大小为256*56*56
Conv2d(256, 256, 3, 1, 1), # 参数量 256*256*3*3+256 特征图大小为256*56*56
MaxPool2d(2), # 特征图大小为256*28*28
Conv2d(256, 512, 3, 1, 1), # 参数量512*256*3*3+512 特征图大小为512*28*28
Conv2d(512, 512, 3, 1, 1), # 参数量 512*512*3*3+512 特征图大小为512*28*28
MaxPool2d(2), # 特征图大小为512*14*14
Conv2d(512, 512, 3, 1, 1), # 参数量512*512*3*3+512 特征图大小为512*14*14
Conv2d(512, 512, 3, 1, 1), # 参数量 512*512*3*3+512 特征图大小为512*14*14
MaxPool2d(2), # 特征图大小为512*7*7
AdaptiveMaxPool2d(7) # 自适应池化后,特征图大小为512*7*7
)
self.classifier = Sequential(
Flatten(),
Linear(512 * 7 * 7, 4096),
Linear(4096, 4096),
Linear(4096, num_class)
)
def forward(self, x):
x = self.features(x)
x = self.classifier(x)
return x
def get_parameter_number(model):
total_num = sum(p.numel() for p in model.parameters())
trainable_num = sum(p.numel() for p in model.parameters() if p.requires_grad)
return {'Total': total_num, 'Trainable': trainable_num}
# 测试模型
if __name__ == "__main__":
model = MyVGG()
params = get_parameter_number(model)
print(f"总参数量: {params['Total']:,}")
print(f"可训练参数量: {params['Trainable']:,}")四、ResNet
ResNet 通过引入残差块 解决退化问题,其核心思想是:让网络学习残差(Residual)而非直接学习目标映射。
残差块结构
一个残差块包含:
- 主路径(Main Path):由卷积层、BN 层、ReLU 激活组成的特征变换(记为 F(x))。
- 跳跃连接(Skip Connection):直接将输入 x 跳过主路径连接到输出(恒等映射,Identity Mapping)。
最终输出为:y=F(x)+x即网络只需学习 残差 F(x)=y−x,而非直接学习 y。