目录
[一、ACC 自适应巡航控制](#一、ACC 自适应巡航控制)
[1.1 是什么?](#1.1 是什么?)
[1.2. 核心功能与工作原理](#1.2. 核心功能与工作原理)
[1.3 ACC 的进阶形态:全速域自适应巡航](#1.3 ACC 的进阶形态:全速域自适应巡航)
[1.4 使用场景与限制](#1.4 使用场景与限制)
[二、LKA( Lane Keeping Assist)车道保持辅助](#二、LKA( Lane Keeping Assist)车道保持辅助)
[2.1 它是什么?](#2.1 它是什么?)
[2. 2 核心功能与工作原理](#2. 2 核心功能与工作原理)
[2.3 容易混淆的概念:LKA 与 LDW 和 LCC](#2.3 容易混淆的概念:LKA 与 LDW 和 LCC)
[2.4 使用场景与限制](#2.4 使用场景与限制)
[4.1 自动变道辅助-HWA最核心的"变动"功能](#4.1 自动变道辅助-HWA最核心的“变动”功能)
[4.2 智能跟车与车道居中](#4.2 智能跟车与车道居中)
[4.3 HWA 在自动驾驶等级中的位置](#4.3 HWA 在自动驾驶等级中的位置)
[4.4 HWA 与其它常见系统的区别](#4.4 HWA 与其它常见系统的区别)
[使用 HWA 的重要注意事项](#使用 HWA 的重要注意事项)
[五、AEB(Autonomous Emergency Braking)-自动紧急制动](#五、AEB(Autonomous Emergency Braking)-自动紧急制动)
[5.1 是什么?](#5.1 是什么?)
[5.2 核心工作原理](#5.2 核心工作原理)
[5.3 AEB 主要功能类型](#5.3 AEB 主要功能类型)
[5.4 AEB 的重要性](#5.4 AEB 的重要性)
[5.5 使用 AEB 的重要注意事项(局限性)](#5.5 使用 AEB 的重要注意事项(局限性))
[六、FCTA(Front Cross Traffic Alert)前方横向来车预警](#六、FCTA(Front Cross Traffic Alert)前方横向来车预警)
[6.1 它是什么?](#6.1 它是什么?)
[6.2 它如何工作?](#6.2 它如何工作?)
[6.3 主要使用场景](#6.3 主要使用场景)
[6.4 与类似功能的区别](#6.4 与类似功能的区别)
[七、FCTB(Front Cross Traffic Brake)-前方横向来车制动](#七、FCTB(Front Cross Traffic Brake)-前方横向来车制动)
[八、FCW(Forward Collision Warning)-前方碰撞预警](#八、FCW(Forward Collision Warning)-前方碰撞预警)
[8.1 核心功能](#8.1 核心功能)
[8.2 流程演示](#8.2 流程演示)
[九、DOW (Door Open Warning)- 开门预警系统](#九、DOW (Door Open Warning)- 开门预警系统)
[9.1 它是什么?](#9.1 它是什么?)
[9.2 它如何工作?](#9.2 它如何工作?)
[9.3 DOW 与其他系统的关联](#9.3 DOW 与其他系统的关联)
[9.4 重要注意事项](#9.4 重要注意事项)
[十、RCTB(Rear Cross Traffic Brake) - 后方横向来车制动系统](#十、RCTB(Rear Cross Traffic Brake) - 后方横向来车制动系统)
[十一、ELK(Emergency Lane Keeping)- 紧急车道保持](#十一、ELK(Emergency Lane Keeping)- 紧急车道保持)
[11.1 ELK是什么?](#11.1 ELK是什么?)
[11.2 ELK 与普通 LKA 的核心区别](#11.2 ELK 与普通 LKA 的核心区别)
一、ACC 自适应巡航控制
1.1 是什么?
ACC是一个智能化的巡航控制系统。它通过车头的雷达或摄像头,探测前方车辆,自动控制车速和车距,实现跟车行驶。
1.2. 核心功能与工作原理
设定速度:您设定一个期望的最高巡航速度(例如 100 km/h)。
设定车距:您设定与前方车辆希望保持的距离(通常有1-4档可选)。
-
智能跟车:
-
前方无车时:车辆会按照您设定的速度(100 km/h)匀速行驶,就像定速巡航一样。
-
前方有慢车时:系统检测到前方有车速更慢的车辆(例如 80 km/h),会自动减速,并保持您设定的安全距离,跟随前车。
-
前车加速或变道离开时:系统会自动加速,直到恢复到您设定的最高速度(100 km/h)。
-
前车减速或刹车时:系统会自动减速,甚至刹停。
-
1.3 ACC 的进阶形态:全速域自适应巡航
早期的 ACC 有最低工作速度限制(如 30 km/h),一旦低于这个速度就会解除。而现在的全速域 ACC 实现了:
-
跟停:在拥堵路况下,可以跟随前车直至完全停止。
-
跟走:车辆停止后,如果前车在短时间内(通常是 3 秒内)重新启动,ACC 会自动跟随起步。如果停车时间较长,通常需要驾驶员轻踩油门或按一下按键来重新激活。
1.4 使用场景与限制
-
主要场景:高速公路、城市快速路、高架桥等路况较好的封闭道路。在长途驾驶和拥堵跟车时,能极大缓解驾驶疲劳。
-
局限性:
-
识别静态障碍物(如路障、事故车、蹲着的人)的能力较弱。
-
在急弯道时,雷达可能无法有效探测到前方车辆。
-
它只是一个辅助系统,不能替代驾驶员观察和刹车!
-
二、LKA( Lane Keeping Assist)车道保持辅助
2.1 它是什么?
LKA 通过前挡风玻璃上的摄像头识别车道线,自动微调方向盘,帮助车辆保持在车道中央行驶。
2. 2 核心功能与工作原理
-
识别车道:摄像头实时扫描车辆前方的车道线(白色或黄色)。
-
纠偏干预:
-
当系统发现车辆即将无意识偏离车道时(例如压到车道线),会对方向盘施加一个轻微的纠正力矩,或者通过振动方向盘、发出警报来提醒驾驶员。
-
请注意,LKA 是**"辅助"**,它不是一直持续控制方向盘,而是在"快要偏离时才干预"。
-
2.3 容易混淆的概念:LKA 与 LDW 和 LCC
为了更好地理解 LKA,需要区分另外两个术语:
-
LDW - 车道偏离预警:
- 只有警告,没有动作。 当车辆无意识压线时,系统只会通过声音、图标闪烁或方向盘振动来提醒驾驶员,但不会主动纠正方向。
-
LCC - 车道居中保持:
-
这是 LKA 的进阶和增强版。
-
它不是等到快压线了才干预,而是持续地、主动地 对方向盘进行微调,使车辆始终稳定在车道正中央行驶。
-
它的控制感更平滑、更连续,大大减少了车辆的"画龙"现象。
-
关系:我们通常所说的 LKA,在很多新车型上实际已经升级为了 LCC 功能。
-
2.4 使用场景与限制
-
主要场景:车道线清晰的高速公路和城市快速路。
-
局限性:
-
在车道线模糊、磨损、被积雪或泥土覆盖的路段会失效。
-
在急弯道上,系统能力有限。
-
遇到施工区、复杂路口时,系统无法处理。
-
驾驶员必须始终手握方向盘,否则系统会报警并退出。
-
三、总结与对比
| 特性 | ACC(自适应巡航) | LKA(车道保持辅助) |
|---|---|---|
| 控制维度 | 纵向控制(油门/刹车) | 横向控制(方向盘) |
| 核心功能 | 跟车、控速、保持车距 | 防止无意识偏离车道,保持车辆在车道内 |
| 传感器 | 雷达、摄像头 | 摄像头 |
| 驾驶员角色 | 无需控制油门和刹车 | 必须手握方向盘,准备接管 |
| 好比 | 您的右脚,帮您踩油门和刹车 | 您的左手,帮您微调方向,防止跑偏 |
四、HWA(highway-Assist)高速公路辅助
HWA是在ACC自适应巡航和LKA车道保持辅助基础上,功能更强大的一个组合系统。加了更智能、更拟人化的功能,主要体现在:
4.1 自动变道辅助-HWA最核心的"变动"功能
-
如何工作:开启HWA后,拨动转向灯杆(向左或向右),系统会:
-
智能判断:通过雷达和摄像头,自动检测相邻车道是否安全、有足够的空间变道。
-
自动执行 :如果条件允许,系统会自动控制方向盘,平稳地将车辆驶入相邻车道。
-
完成变道:变道完成后,车辆会继续在新的车道上沿车道中心行驶,并恢复之前的ACC跟车状态。
-
图示:

-
-
意义:这大大减少了驾驶员在长途高速驾驶中的操作负担,更接近"自动驾驶"的体验。
4.2 智能跟车与车道居中
-
HWA系统在处理大曲率弯道时,表现通常比基础的LKA更稳定、更平滑。
-
在面对缓慢前车时,系统可能会在条件允许时,提示或自动执行变道超车(部分高级HWA具备此功能)。
4.3 HWA 在自动驾驶等级中的位置
根据国际通用的SAE自动驾驶等级标准(L0-L5),HWA属于 L2+(或称为L2.5)级别 的自动驾驶。
-
L2 :系统同时控制纵向 (油门/刹车-ACC)和横向(方向盘-LKA)运动,但驾驶员必须全程监控环境并随时准备接管。
-
L2+ (HWA) :在L2的基础上,增加了特定场景下的自动变道等更高级的功能,自动化程度更高。
4.4 HWA 与其它常见系统的区别
| 功能系统 | 控制车速/车距 (纵向) | 保持在车道内 (横向) | 自动变道 | 等级 |
|---|---|---|---|---|
| ACC | ✅ | ❌ | ❌ | L1 |
| LKA | ❌ | ✅ | ❌ | L1 |
| ACC + LKA | ✅ | ✅ | ❌ | L2 |
| HWA(高速公路辅助) | ✅ | ✅ | ✅(核心) | L2+ |
| FSD/NOA(更高级系统) | ✅ | ✅ | ✅(+自动导航上下匝道等) | L2+ ~ L3雏形 |
注意:像特斯拉的FSD(完全自动驾驶能力)、小鹏的NGP(导航辅助驾驶)、蔚来的NOP(领航辅助)等,可以看作是HWA的进一步升级,它们增加了根据导航路线自动进出匝道、自动超越慢车等更复杂的功能。
4.5 使用 HWA 的重要注意事项
-
它不是自动驾驶 :HWA是高级驾驶辅助系统,驾驶员必须始终保持手握方向盘,并观察路况,随时准备接管。
-
有使用条件限制 :通常只在封闭的高速公路或城市快速路上工作。在普通城市道路、路口、恶劣天气(大雨、大雪影响传感器)下可能无法启用或会自动退出。
-
需要驾驶员主动激活变道:大部分HWA系统需要驾驶员拨动转向灯杆来"授权"变道,系统本身不会"随意"自动变道。
-
熟悉您的车辆:不同品牌(如奔驰、宝马、小鹏、理想等)的HWA具体表现和操作方式可能有细微差别,请务必阅读车辆手册,并在安全环境下熟悉其特性。
五、AEB(A utonomous E mergency B raking)-自动紧急制动
图示: 
5.1 是什么?
AEB是一个在危机情况下能代替或帮助驾驶员主动刹车的安全系统。
5.2 核心工作原理
-
感知 :通过车辆前方的雷达、摄像头或两者的融合系统,持续不断地探测与前方车辆、行人或其他障碍物的距离和相对速度。
-
判断 :车载电脑会实时分析这些数据。如果系统判断出即将发生碰撞,而驾驶员没有采取任何制动措施,或者制动力度不足时,它就会被触发。
-
执行:
-
第一阶段:发出警报。通过声音、视觉或触觉(如方向盘震动)方式向驾驶员发出紧急警告。
-
第二阶段:自动全力刹车 。如果驾驶员仍未反应,系统会绕过驾驶员,自动对车辆进行全力制动,以避免碰撞或最大限度地减轻碰撞的严重程度。
-
5.3 AEB 主要功能类型
随着技术的发展,AEB 的功能也越来越强大,通常包括以下几种类型:
-
C2C AEB :车辆对车辆。针对前方行驶或静止的汽车。这是最基本和最常见的功能。
-
VRU AEB :弱势道路使用者。这是更高级的功能,专门针对:
-
行人检测
-
骑行者检测
-
-
AEB 交叉路口辅助:在车辆穿过十字路口时,检测侧向穿行的车辆并实施制动。
-
倒车 AEB:在倒车时检测后方的障碍物并自动刹车。
5.4 AEB 的重要性
AEB 被全球汽车安全评测机构(如中国的 C-NCAP、中保研,欧洲的 E-NCAP)视为核心安全指标,其重要性体现在:
-
减少追尾事故:这是 AEB 最显著的作用,能极大降低追尾事故。
-
保护弱势群体:带有行人检测的 AEB 可以有效降低车外行人和骑行者的伤亡风险。
5.5 使用 AEB 的重要注意事项(局限性)
尽管 AEB 非常强大,但它绝不能被视为"万能保险"或替代驾驶员的注意力。必须清楚其局限性:
- 它不是自动驾驶 :AEB 是一个安全备份系统,设计初衷是处理紧急情况,而不是用于日常驾驶。
六、FCTA(Front Cross Traffic Alert )前方横向来车预警
6.1 它是什么?
FCTA 是一个在交叉路口使用的安全辅助系统。当驾车通过没有交通信号灯的前方交叉路口时,如果您的视线被两侧的建筑物、树木或停放的车辆等遮挡(形成视觉盲区),该系统可以探测到从侧向(左前方或右前方)接近的车辆,并发出警告。
6.2 它如何工作?
-
传感器 :该系统通常利用车辆前部的雷达传感器 和广角摄像头,对车辆左前方和右前方的大范围区域进行扫描。
-
探测与判断:系统会持续监测从侧向横穿您行驶路径的车辆。
-
预警 :当系统判断侧向来车有与您发生碰撞的风险时,它会通过声音警报、视觉图标(通常在仪表盘或抬头显示上) ,有时还会配合方向盘震动来提醒。
6.3 主要使用场景
-
**无红绿灯的十字路口或T型路口;**当视线因障碍物而受阻,存在"鬼探头"风险时。
-
车辆从辅路驶入主路时。
6.4 与类似功能的区别
很多人熟悉 RCTA,它们原理相似但应用场景不同:
-
RCTA :后方横向来车预警。
-
场景 :在倒车驶出停车位 时,监测车辆后侧方是否有来车(如行人、自行车、汽车);在正常行驶通过前方交叉路口时,监测从侧向横穿的车辆。
-
FCTA :前方交叉路口预警。
-
总结来说,FCTA 是一项旨在提升交叉路口通行安全性的主动安全技术,它能有效弥补驾驶员的前向视觉盲区,预防侧向碰撞事故的发生。
七、FCTB(Front Cross Traffic Brake )-前方横向来车制动
FCTB 解决的正是被称为"鬼探头"的最危险驾驶场景之一。在这种场景下,驾驶员的反应时间极短,FCTB 的自动制动功能可以弥补人类的反应延迟,成为避免事故的最后一道坚固防线。
八、FCW(Forward Collision Warning)-前方碰撞预警
8.1 核心功能
FCW系统通过车辆前部的雷达和/或摄像头 ,持续监测与前车的距离和相对速度。当系统判断有追尾碰撞的高风险 ,而驾驶员没有采取任何措施时,它就会触发 "FCW报警"。
8.2 流程演示
配备了FCW和AEB的车辆,在遇到紧急情况时的典型反应是:
FCW报警(提醒驾驶员) → 如果驾驶员未制动 → AEB系统介入自动紧急刹车 。所以,FCW是AEB系统的前半部分,专门负责预警。
九、DOW (Door Open Warning)- 开门预警系统
9.1 它是什么?
DOW 系统旨在解决一个非常常见且危险的情景------ "开门杀" 。当车辆停靠在路边,驾乘人员准备打开车门时,DOW 系统会持续监测车辆侧后方是否有接近的车辆、行人或骑行者。如果系统判断开门动作会与后方来物发生碰撞,它会立即向驾乘人员发出警告,提示暂缓开门。如下图所示: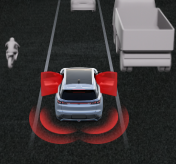
9.2 它如何工作?
感知阶段:
-
车辆处于停车状态(或刚熄火),但尚未锁车。
-
系统通过安装在车辆侧后部(如C柱、后保险杠)的雷达传感器 和/或盲区摄像头,持续扫描车辆侧后方和侧方的动态。
判断与预警阶段:
-
当有行人、自行车、摩托车或汽车从后方接近时,系统会计算其速度和轨迹。
-
一旦判断出对方会在车门打开的瞬间经过,系统便会触发警报。
-
警报触发时机 :通常是在车内人员手动触碰门把手 或开始拉动车门内开关的瞬间。系统非常智能,它知道您有开门的意图。
警报形式:
-
视觉警报 :在对应的外侧后视镜 、A柱(车窗三角区) 或顶棚控制区会亮起醒目的警示图标(通常是一个红色的车门打开符号,或一个黄色的三角形警示符)。
-
声音警报:发出"嘀嘀嘀"的急促蜂鸣声。
-
触觉警报(少数车型) :门把手或座椅可能会产生震动。
9.3 DOW 与其他系统的关联
DOW 可以被看作是 盲区监测系统 在车辆静止状态下的一个特定功能延伸和强化。
-
BSW/LCA :主要在车辆行驶时监测侧后方盲区,辅助变道。
-
RCTA :主要在车辆倒车时 监测后方横向来车。

-
DOW :主要在车辆静止、人员准备下车时监测侧后方来车来人。
它们共同构成了车辆侧后方的 360 度安全防护网络。
9.4 重要注意事项
-
是预警,非自锁 :DOW 系统不会自动锁死车门阻止您开门。它只负责发出警告,最终是否开门仍由车主决定。
-
养成"荷式开门法"习惯 :无论车辆是否配备 DOW,都应养成安全的开门习惯。即用离车门较远的那只手 去开门(例如司机用右手开),这个动作会迫使您的身体和头部自然转动,从而更好地观察侧后方情况。DOW 是最后一道科技防线,而良好的驾驶习惯才是第一道、也是最可靠的防线。
十、RCTB(Rear Cross Traffic Brake)- 后方横向来车制动系统
首先会警告驾驶员 ;如果驾驶员未采取任何应对措施 ,系统会自动进行紧急刹车,以避免或减轻碰撞。
RCTA 是 "提醒你后面有车来,小心!"
RCTB 是 "提醒你后面有车来!如果你没反应,我就帮你踩死刹车!
十一、ELK(Emergency Lane Keeping )- 紧急车道保持
11.1 ELK是什么?
ELK 是一个主动安全系统 ,它的核心目的是在驾驶员无意识 或非自愿 地偏离车道,并可能引发严重侧向碰撞时,进行紧急干预 ,将车辆拉回本车道内。
11.2 ELK 与普通 LKA 的核心区别
-
LKA 像一位耐心的教练,全程轻轻扶着方向盘,帮你保持在车道中心。
-
ELK 像一位警觉的保镖,平时不动声色,只在你要撞上旁边车辆或护栏的瞬间,猛地把你拉回来。