文章目录
- [0. 论文项目地址](#0. 论文项目地址)
- [1. 论文题目与研究方向](#1. 论文题目与研究方向)
- [2. 主要研究问题(研究动机)](#2. 主要研究问题(研究动机))
- [3. 方法概述(技术路线、模型或实验方法)](#3. 方法概述(技术路线、模型或实验方法))
-
- (1)总体框架:P3-SAM
- (2)模型结构
- (3)自动化分割算法
- [(4) 训练数据与策略](#(4) 训练数据与策略)
- [4. 主要结果与结论](#4. 主要结果与结论)
- [5. 创新点与贡献](#5. 创新点与贡献)
- [6. 存在的不足或局限性](#6. 存在的不足或局限性)
0. 论文项目地址
论文:https://arxiv.org/pdf/2509.06784
Github: https://murcherful.github.io/P3-SAM/
1. 论文题目与研究方向
题目: P3-SAM: Native 3D Part Segmentation
Point-Promptable Part Segmentation Model 点提示式部件分割模型
研究方向: 三维(3D)形状的部件级分割(part segmentation) ,重点在于从原生3D数据中实现自动化、无类别约束、可交互的部件分割。
2. 主要研究问题(研究动机)
现有3D分割方法存在以下问题:
-
依赖预定义类别标签 ,无法泛化到任意形状或任意部件。
-
使用2D模型迁移至3D(2D lifting)时存在显著的域差距 与三维一致性问题,鲁棒性差。
SAMesh 示意图(2D-3D 方案)
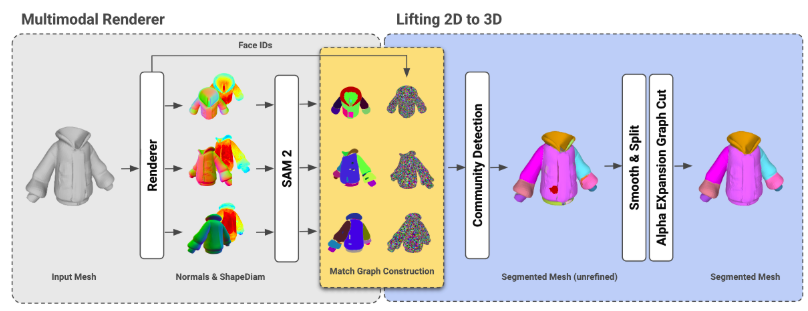
SAMPart3D(Yang 等人,2024)使用 SAM 对点云投影特征进行分割,然后是利用多模态大模型对部件标注。
Point-SAM(Zhou 等人,2024)将 SAM 适配到三维点云,并利用 SAM 基于多视图图像设计了一个数据引擎,使用二维数据引擎基于提示点实现部件分割,是 p3-sam 的在主要灵感来源。
-
多数方法仍需人工输入提示点或部件数量 ,无法实现全自动分割。
研究动机:构建一个原生3D端到端模型 ,仅基于三维点云数据即可自动完成复杂物体的部件分割,同时保持可交互性与高精度。
3. 方法概述(技术路线、模型或实验方法)
(1)总体框架:P3-SAM
-
核心思想: 借鉴 2D Segment Anything Model (SAM),提出Point-Promptable 3D Segmentation Model。
- P3 - SAM 简化了 SAM 的体系结构。没有采用 SAM 中复杂的分割解码器和多种类型的提示,模型只处理一个正点提示。具体来说,P3 - SAM 包含一个特征提取器,三个分割头和一个 IoU 预测头。
- 跟SAM一样,创建了一个迄今最大最全的 3D 分割数据集,模型拥有全自动标注流水线,并且用标注进行训练,实现数据-标注循环
-
主要成果:
- 提出了一种原生的点提示零件分割模型,不再依赖标签数据
- 构建全自动分割流水线
- 使用 3D 点云进行训练,没有 2D 转 3D 的三维一致性问题,精度、鲁棒性更高
-
输入:三维网格或点云(Point Cloud)+ 单个提示点。
-
输出:多个多尺度掩膜(mask)及最佳预测的部件分割结果。
(2)模型结构
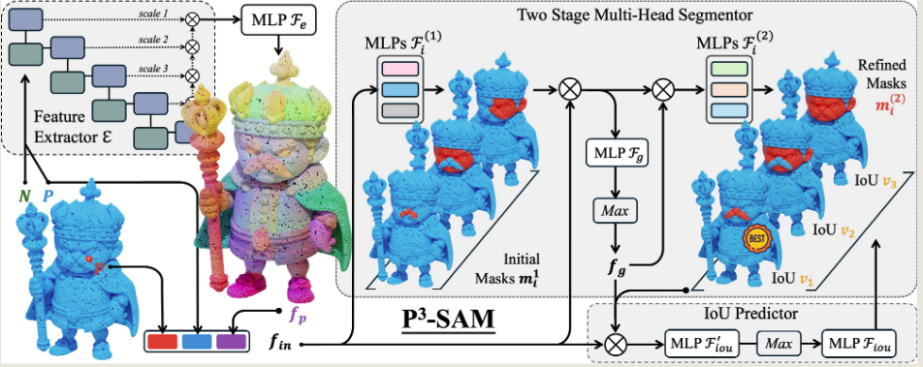
由三部分组成(见下图 ):
-
特征提取器:使用 PointTransformerV3(Sonata)提取多尺度点特征。并使用共享参数的 MLP Fe 处理融合后的多尺度特征,从而增强特征的表达能力。
-
两阶段多头分割器(Two-Stage Multi-Head Segmentor):
- 第一阶段:生成三种尺度的掩膜。
此时没有全局特征,因此作为中间结果与输入特征图融合后再与全局特征融合,作为第二阶段的输入。
第一阶段的输入是 fin,输出是 m1, fin 与 m1 融合得到f(1), 再经过 MLPfg 和最大池化得到 fg。 - 第二阶段:融合全局特征优化结果,提升边界与结构一致性。
第二阶段的输入是 f (1) 与 fg 的融合,输出为 m2
- 第一阶段:生成三种尺度的掩膜。
-
IoU预测器:自动评估三组掩膜质量,选择最优结果。
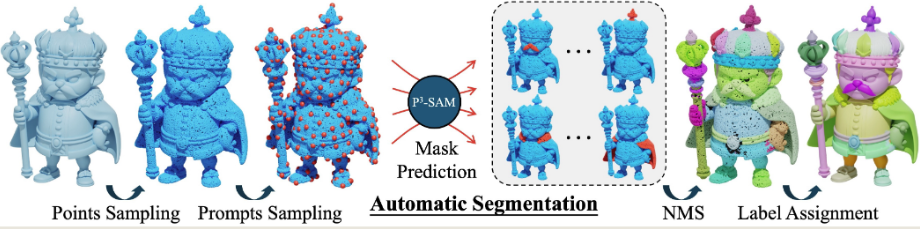
(3)自动化分割算法
-
使用 Farthest Point Sampling (FPS) 生成候选提示点。
-
模型对每个提示点预测掩膜与IoU分数。
-
使用NMS(Non-Maximum Suppression,非极大值抑制)去重合并掩膜。
-
最终通过**投票与洪泛填充(flood fill)**获得完整部件标注。
(4) 训练数据与策略
-
构建了一个原生3D部件数据集(约3.7百万模型),来自 Objaverse、ShapeNet、PartNet 等。
-
通过自动标注管线生成部件掩膜,并将部分模型修复为 watertight。
watertight
在 3D 建模、CAD 或三维网格(mesh)相关场景中,"watertight" 特指模型是 完全封闭的、无孔洞或缝隙的连续表面 。
这种模型的特点是:1. 所有边缘都被两个面共享(无 "悬边");2. 没有缺失的面或未封闭的开口;3. 能形成一个 "密闭体积"(如一个完整的球体、立方体)。
-
采用 Dice 损失+ Focal 损失结合IoU监督进行优化。
Dice 是重叠度特化损失, 解决类别不平衡 问题
Focal loss 是难度权重特化损失,解决难样本挖掘问题
-
引入随机噪声(概率提供噪声点提示)、法向扰动(概率不提供法向量)、混合封闭性数据和非封闭性数据等数据增强提升鲁棒性。
4. 主要结果与结论
-
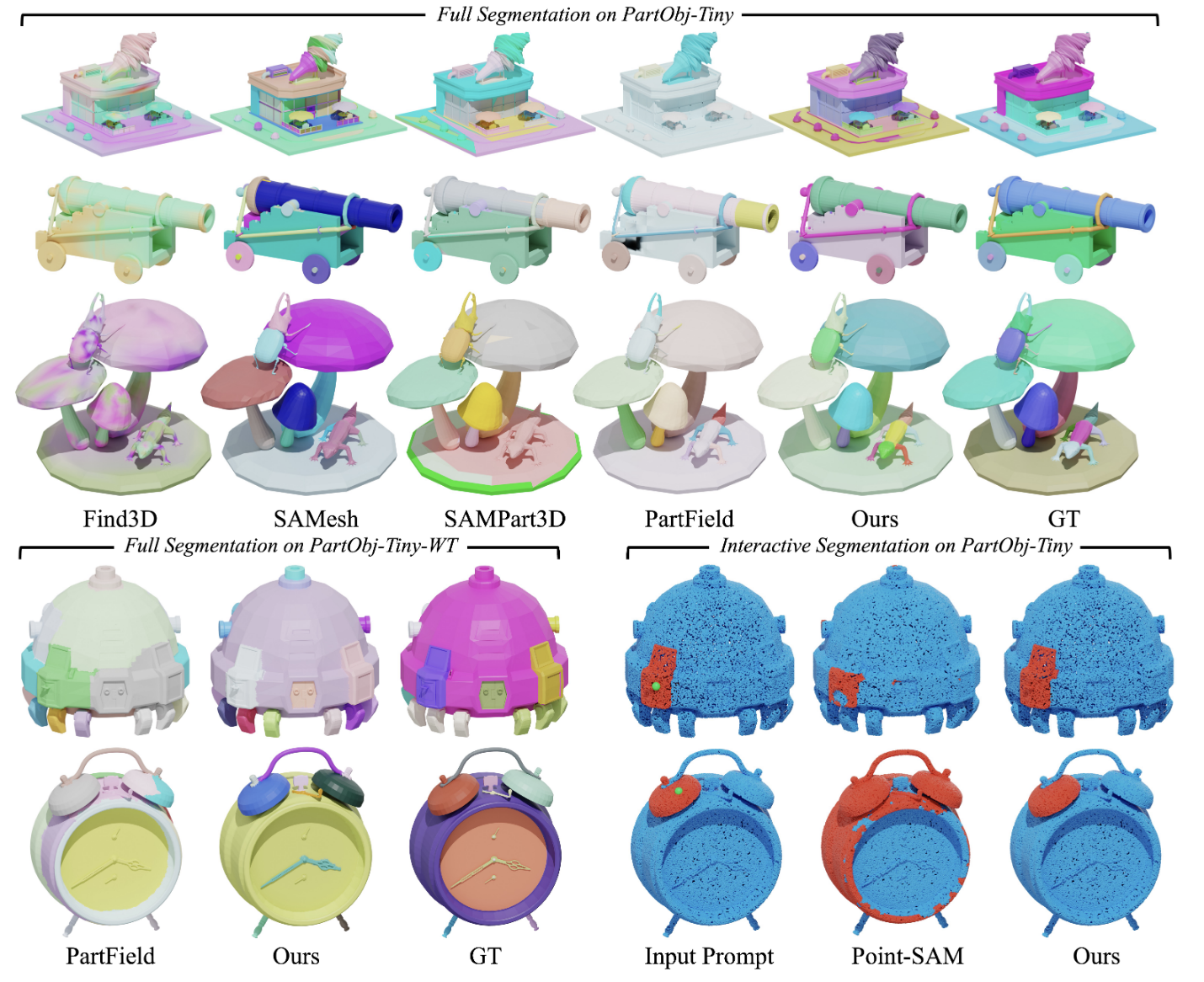
在 PartObj-Tiny、PartObj-Tiny-WT、PartNetE 等基准上,P3-SAM在三种任务 (全分割、有/无连接约束、交互式分割)中均取得SOTA性能:
- 平均 mIoU 达到 59.9%~81.1%(显著优于 Find3D、PartField、Point-SAM 等)。
-
实验验证:
-
对复杂几何结构(如动物、交通工具、植物等)表现稳定。
-
对 watertight 与非 watertight 模型均具备强泛化性。
-
-
支持多种下游应用:
- 自动/多提示点分割、层次化分割(Hierarchical Segmentation)、3D部件生成(Part Generation)。
结论: P3-SAM 实现了真正意义上的原生3D自动部件分割,在准确度、泛化性与实时性上均达到领先水平。
5. 创新点与贡献
-
首个原生3D点提示可分割模型(Point-Promptable 3D SAM),摆脱2D依赖。
-
两阶段多头掩膜结构 + IoU预测器,实现多尺度精细分割与自动掩膜选择。
-
全自动3D部件分割算法(FPS + NMS + Flood Fill)。
-
超大规模原生3D部件数据集(3.7M模型),具高质量掩膜标签。
-
可扩展、多任务能力:支持交互式、层次式、生成式任务。
6. 存在的不足或局限性
-
模型过度依赖几何表面信息,缺乏对三维空间体积的理解。
-
训练数据均为表面点云,无法捕获体积一致性(volumetric consistency)。
-
尚未充分结合语义信息或文本提示。
-
对极端复杂或纹理模糊的模型仍可能出现过分割或漏分割。
-
高精度训练需要大量GPU资源(训练约4天,64×H20 GPU)。