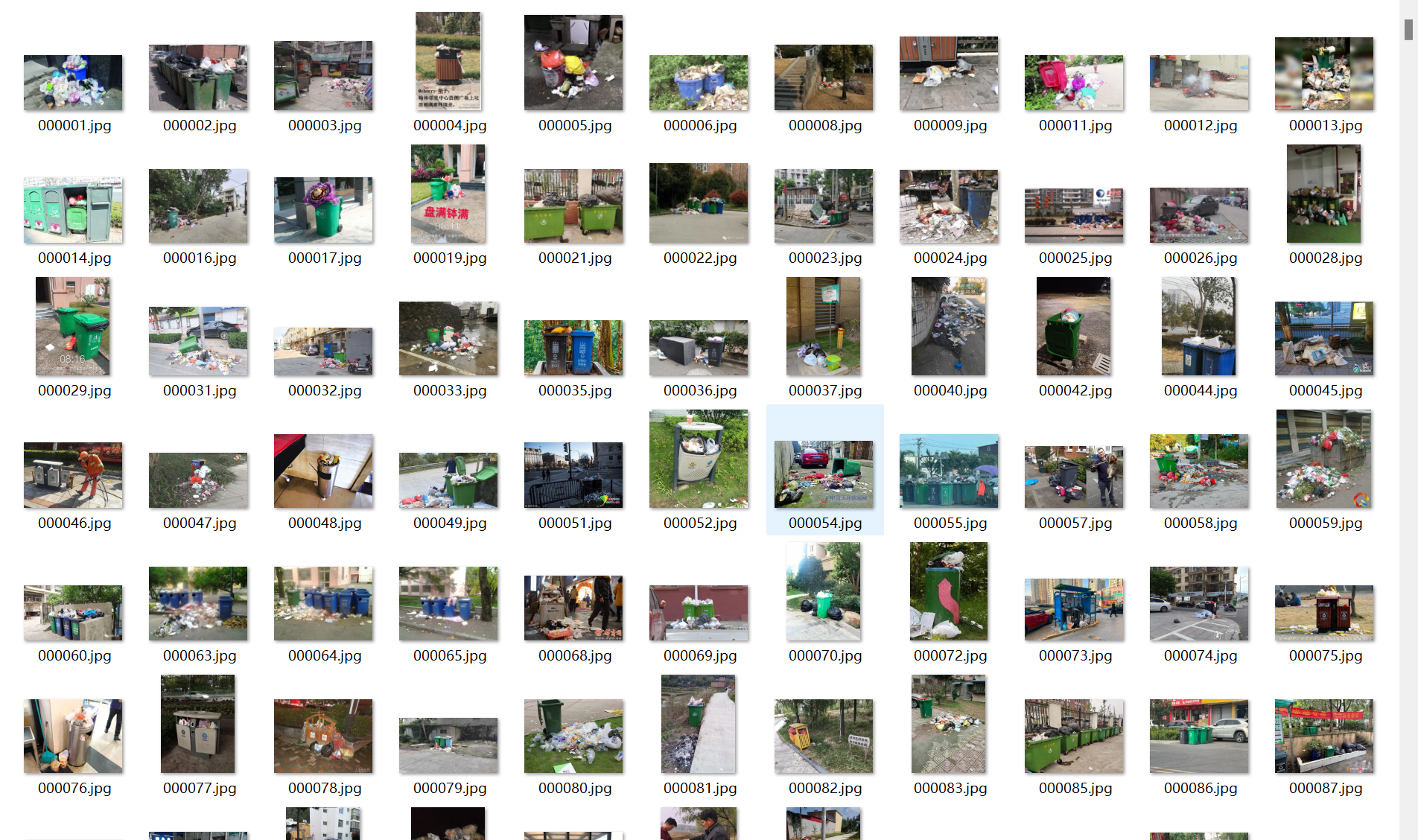
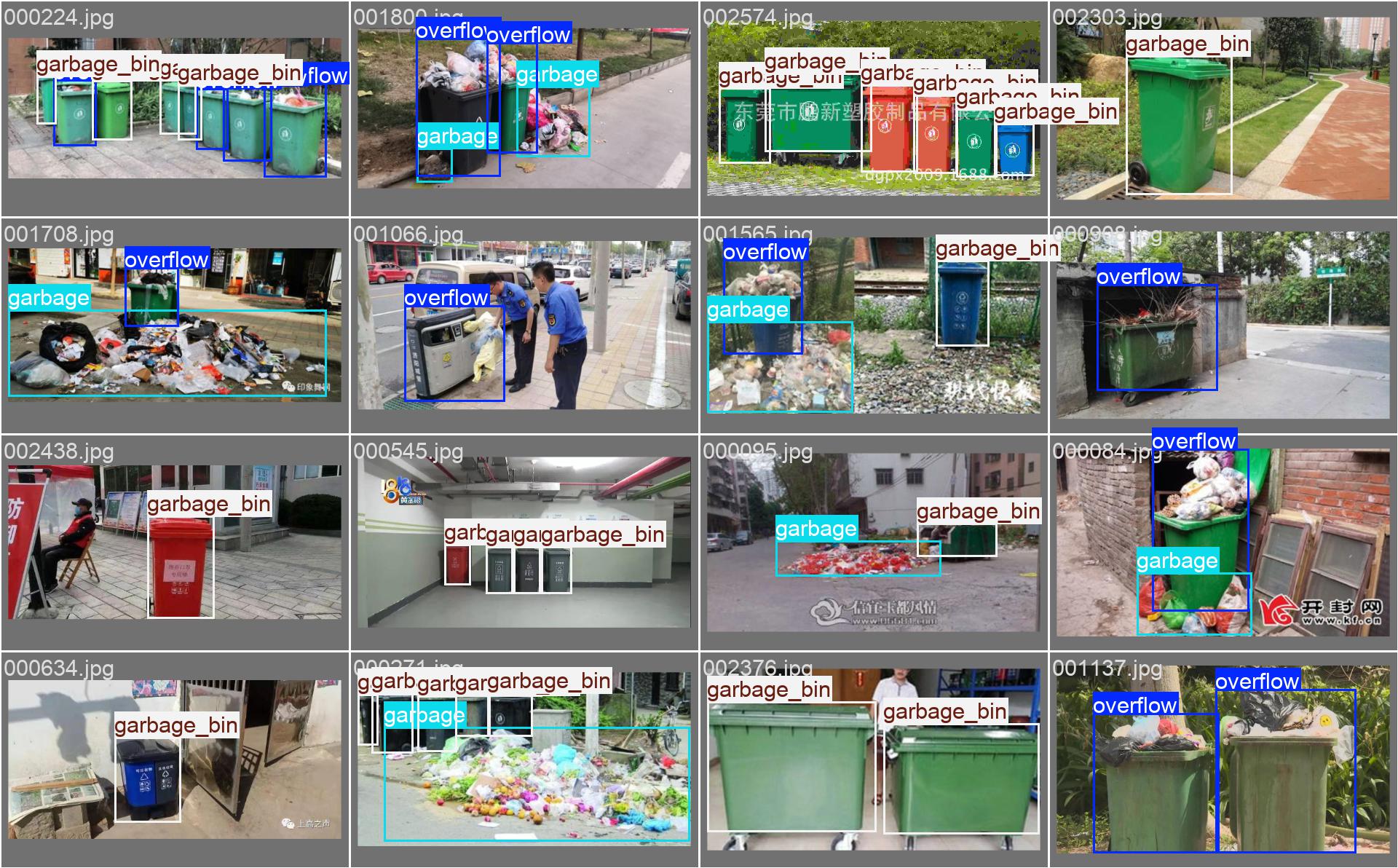
基于深度学习YOLOv12神经网络实现垃圾桶满溢检测和识别,其能识别检测出3种垃圾桶满溢:names: 'overflow', 'garbage', 'garbage_bin'
具体图片见如下:
第一步:YOLOv12介绍
YOLO12 引入了一种以注意力为中心的架构,它脱离了之前 YOLO 模型中使用的传统 CNN 方法,但保留了许多应用所必需的实时推理速度。该模型通过在注意力机制和整体网络架构方面的创新方法,实现了最先进的目标检测精度,同时保持了实时性能。
主要功能:
- 区域注意力机制 : 一种新的自注意力方法,可以有效地处理大型感受野。它将 特征图 分成 l 个大小相等的区域(默认为 4 个),水平或垂直,避免复杂的运算并保持较大的有效感受野。与标准自注意力相比,这大大降低了计算成本。
- 残差高效层聚合网络(R-ELAN) :一种基于 ELAN 的改进的特征聚合模块,旨在解决优化挑战,尤其是在更大规模的以注意力为中心的模型中。R-ELAN 引入:
- 具有缩放的块级残差连接(类似于层缩放)。
- 一种重新设计的特征聚合方法,创建了一个类似瓶颈的结构。
- 优化的注意力机制架构 :YOLO12 精简了标准注意力机制,以提高效率并与 YOLO 框架兼容。这包括:
- 使用 FlashAttention 来最大限度地减少内存访问开销。
- 移除位置编码,以获得更简洁、更快速的模型。
- 调整 MLP 比率(从典型的 4 调整到 1.2 或 2),以更好地平衡注意力和前馈层之间的计算。
- 减少堆叠块的深度以改进优化。
- 利用卷积运算(在适当的情况下)以提高其计算效率。
- 在注意力机制中添加一个7x7可分离卷积("位置感知器"),以隐式地编码位置信息。
- 全面的任务支持 : YOLO12 支持一系列核心计算机视觉任务:目标检测、实例分割、图像分类、姿势估计和旋转框检测 (OBB)。
- 增强的效率: 与许多先前的模型相比,以更少的参数实现了更高的准确率,从而证明了速度和准确率之间更好的平衡。
- 灵活部署: 专为跨各种平台部署而设计,从边缘设备到云基础设施。
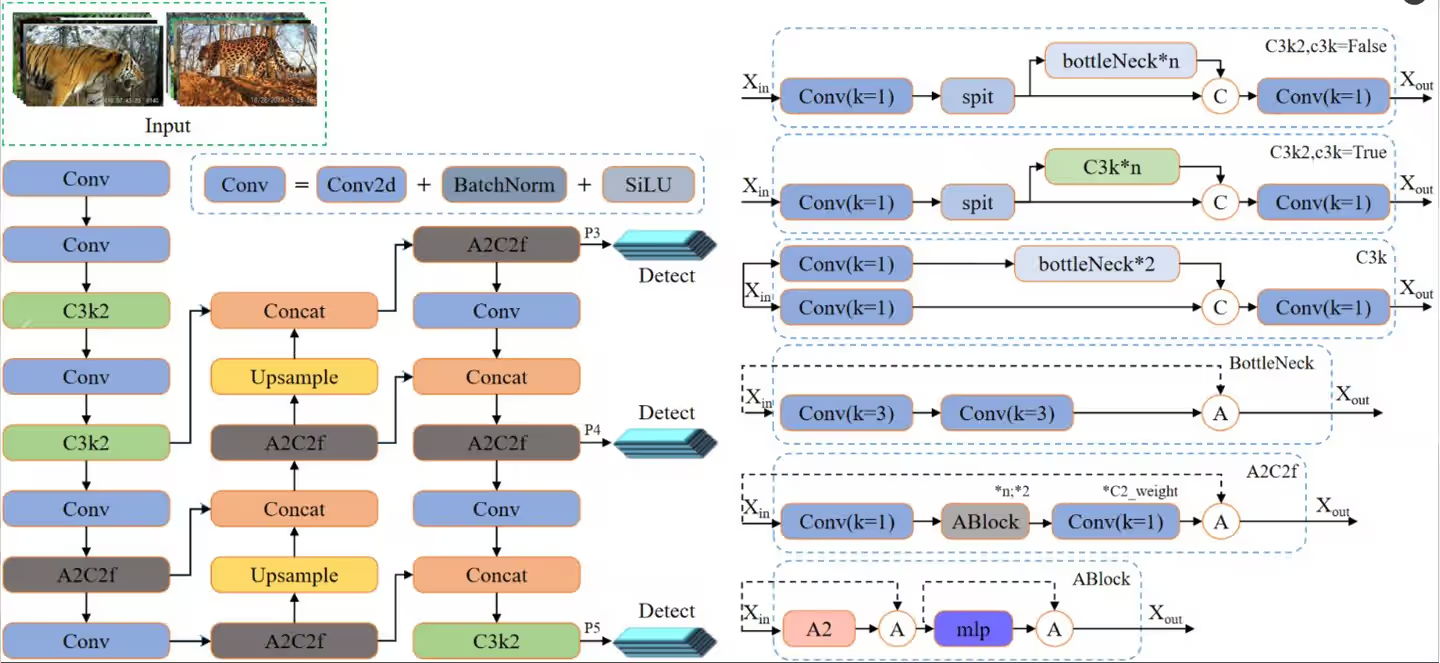
第二步:YOLOv12网络结构
第三步:代码展示
python
# Ultralytics YOLO 🚀, AGPL-3.0 license
from pathlib import Path
from ultralytics.engine.model import Model
from ultralytics.models import yolo
from ultralytics.nn.tasks import ClassificationModel, DetectionModel, OBBModel, PoseModel, SegmentationModel, WorldModel
from ultralytics.utils import ROOT, yaml_load
class YOLO(Model):
"""YOLO (You Only Look Once) object detection model."""
def __init__(self, model="yolo11n.pt", task=None, verbose=False):
"""Initialize YOLO model, switching to YOLOWorld if model filename contains '-world'."""
path = Path(model)
if "-world" in path.stem and path.suffix in {".pt", ".yaml", ".yml"}: # if YOLOWorld PyTorch model
new_instance = YOLOWorld(path, verbose=verbose)
self.__class__ = type(new_instance)
self.__dict__ = new_instance.__dict__
else:
# Continue with default YOLO initialization
super().__init__(model=model, task=task, verbose=verbose)
@property
def task_map(self):
"""Map head to model, trainer, validator, and predictor classes."""
return {
"classify": {
"model": ClassificationModel,
"trainer": yolo.classify.ClassificationTrainer,
"validator": yolo.classify.ClassificationValidator,
"predictor": yolo.classify.ClassificationPredictor,
},
"detect": {
"model": DetectionModel,
"trainer": yolo.detect.DetectionTrainer,
"validator": yolo.detect.DetectionValidator,
"predictor": yolo.detect.DetectionPredictor,
},
"segment": {
"model": SegmentationModel,
"trainer": yolo.segment.SegmentationTrainer,
"validator": yolo.segment.SegmentationValidator,
"predictor": yolo.segment.SegmentationPredictor,
},
"pose": {
"model": PoseModel,
"trainer": yolo.pose.PoseTrainer,
"validator": yolo.pose.PoseValidator,
"predictor": yolo.pose.PosePredictor,
},
"obb": {
"model": OBBModel,
"trainer": yolo.obb.OBBTrainer,
"validator": yolo.obb.OBBValidator,
"predictor": yolo.obb.OBBPredictor,
},
}
class YOLOWorld(Model):
"""YOLO-World object detection model."""
def __init__(self, model="yolov8s-world.pt", verbose=False) -> None:
"""
Initialize YOLOv8-World model with a pre-trained model file.
Loads a YOLOv8-World model for object detection. If no custom class names are provided, it assigns default
COCO class names.
Args:
model (str | Path): Path to the pre-trained model file. Supports *.pt and *.yaml formats.
verbose (bool): If True, prints additional information during initialization.
"""
super().__init__(model=model, task="detect", verbose=verbose)
# Assign default COCO class names when there are no custom names
if not hasattr(self.model, "names"):
self.model.names = yaml_load(ROOT / "cfg/datasets/coco8.yaml").get("names")
@property
def task_map(self):
"""Map head to model, validator, and predictor classes."""
return {
"detect": {
"model": WorldModel,
"validator": yolo.detect.DetectionValidator,
"predictor": yolo.detect.DetectionPredictor,
"trainer": yolo.world.WorldTrainer,
}
}
def set_classes(self, classes):
"""
Set classes.
Args:
classes (List(str)): A list of categories i.e. ["person"].
"""
self.model.set_classes(classes)
# Remove background if it's given
background = " "
if background in classes:
classes.remove(background)
self.model.names = classes
# Reset method class names
# self.predictor = None # reset predictor otherwise old names remain
if self.predictor:
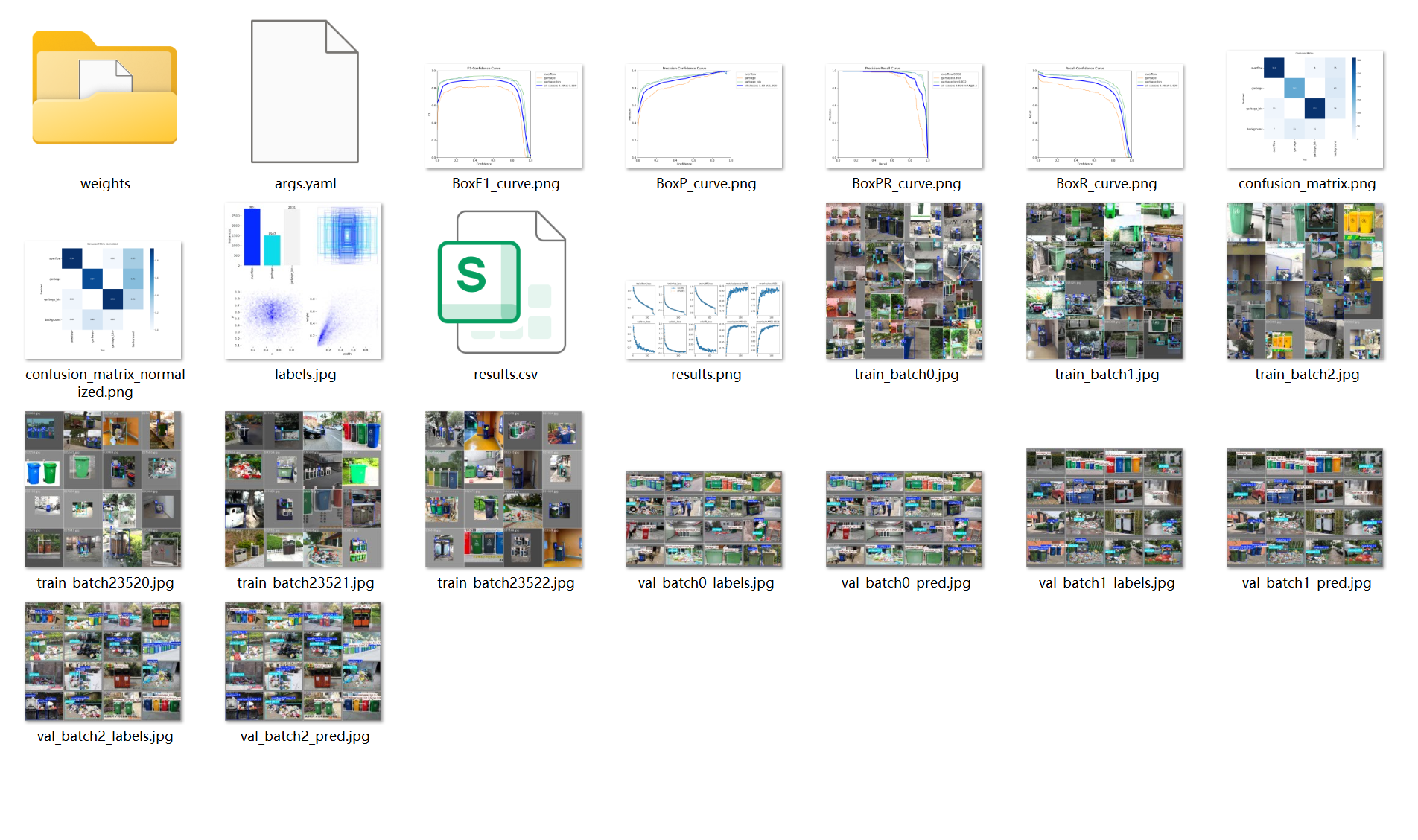
self.predictor.model.names = classes第四步:统计训练过程的一些指标,相关指标都有
第五步:运行预测代码
python
#coding:utf-8
from ultralytics import YOLO
import cv2
# 所需加载的模型目录
path = 'models/best.pt'
# 需要检测的图片地址
img_path = "TestFiles/000353.jpg"
# 加载预训练模型
# conf 0.25 object confidence threshold for detection
# iou 0.7 intersection over union (IoU) threshold for NMS
model = YOLO(path, task='detect')
results = model.predict(img_path, iou=0.5)
# 检测图片
res = results[0].plot()
cv2.imshow("YOLOv12 Detection", res)
cv2.waitKey(0)
第六步:整个工程的内容
包含垃圾桶满溢数据集、训练代码和预测代码

项目完整文件下载请见演示与介绍视频的简介处给出:➷➷➷
https://www.bilibili.com/video/BV1MJ4MzdERe/
