钉钉开放平台
开放平台文档:https://open.dingtalk.com/document/resourcedownload/ding-card-interactive-card-building-platform-new

内部机器人:钉钉机器人搭建
企业内部机器人提供给开发者构建组织内部使用的机器人的能力,开发者可以通过配置企业内部机器人的配置项并调用相关接口向钉钉用户或者钉钉群内发送机器人消息,也可以接收从机器人向开发者组织的业务系统发送的消息。你可跟随本文完成企业内部机器人的配置、开发和上架。
文档地址:https://open.dingtalk.com/document/robots/custom-robot-access?spm=a213l2.30158279.0.0.56525669JvjPsu
内部机器人:创建企业内部应用

内部机器人:Stream 模式
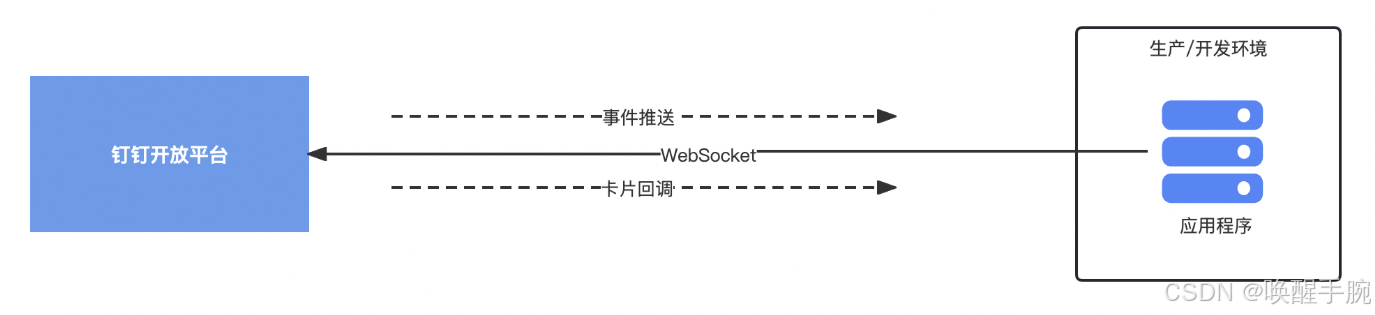
Stream 模式是钉钉开放平台提供的一种集成方式,它可以监听机器人回调、事件订阅回调和注册卡片回调。使用 Stream 模式接入,钉钉开放平台将通过 Websocket 连接与应用程序通讯,Stream 模式将极大降低接入门槛和资源依赖,不需要公网服务器、IP、域名等资源,只需集成钉钉开放平台 SDK 即可。
在 Stream 模式下,开发者的应用程序通过集成 SDK 的方式与钉钉开放平台建立一条 WebSocket 连接,建立连接过程中开放平台将对连接进行鉴权。当有卡片回调发生时,开放平台将通过 WebSocket 连接将数据通知到开发者的应用程序。开发者的应用程序可以接收到这些数据并进行相应处理,从而实现与钉钉开放平台的实时通信。
安装 SDK
clike
pip install dingtalk-stream# !/usr/bin/env python
import argparse
import logging
from dingtalk_stream import AckMessage
import dingtalk_stream
def setup_logger():
logger = logging.getLogger()
handler = logging.StreamHandler()
handler.setFormatter(
logging.Formatter('%(asctime)s %(name)-8s %(levelname)-8s %(message)s [%(filename)s:%(lineno)d]'))
logger.addHandler(handler)
logger.setLevel(logging.INFO)
return logger
def define_options():
parser = argparse.ArgumentParser()
parser.add_argument(
'--client_id', dest='client_id', required=True,
help='app_key or suite_key from https://open-dev.digntalk.com'
)
parser.add_argument(
'--client_secret', dest='client_secret', required=True,
help='app_secret or suite_secret from https://open-dev.digntalk.com'
)
options = parser.parse_args()
return options
class CalcBotHandler(dingtalk_stream.ChatbotHandler):
def __init__(self, logger: logging.Logger = None):
super(dingtalk_stream.ChatbotHandler, self).__init__()
if logger:
self.logger = logger
async def process(self, callback: dingtalk_stream.CallbackMessage):
incoming_message = dingtalk_stream.ChatbotMessage.from_dict(callback.data)
expression = incoming_message.text.content.strip()
try:
result = eval(expression)
except Exception as e:
result = 'Error: %s' % e
self.logger.info('%s = %s' % (expression, result))
response = 'Q: %s\nA: %s' % (expression, result)
self.reply_text(response, incoming_message)
return AckMessage.STATUS_OK, 'OK'
def main():
logger = setup_logger()
options = define_options()
credential = dingtalk_stream.Credential(options.client_id, options.client_secret)
client = dingtalk_stream.DingTalkStreamClient(credential)
client.register_callback_handler(dingtalk_stream.chatbot.ChatbotMessage.TOPIC, CalcBotHandler(logger))
client.start_forever()
if __name__ == '__main__':
main()
usage: main.py [-h] --client_id CLIENT_ID --client_secret CLIENT_SECRET
main.py: error: the following arguments are required: --client_id, --client_secret
python .\main.py --client_id xxxxxx --client_secret xxxxxx
2025-10-14 04:47:03,378 dingtalk_stream.client INFO open connection, url=https://api.dingtalk.com/v1.0/gateway/connections/open [stream.py:149]
2025-10-14 04:47:03,763 dingtalk_stream.client INFO endpoint is {'endpoint': 'wss://wss-open-connection.dingtalk.com:443/connect', 'ticket': 'c58e29d9-a875-11f0-884b-5a20030ba585'} [stream.py:71]互动卡片平台
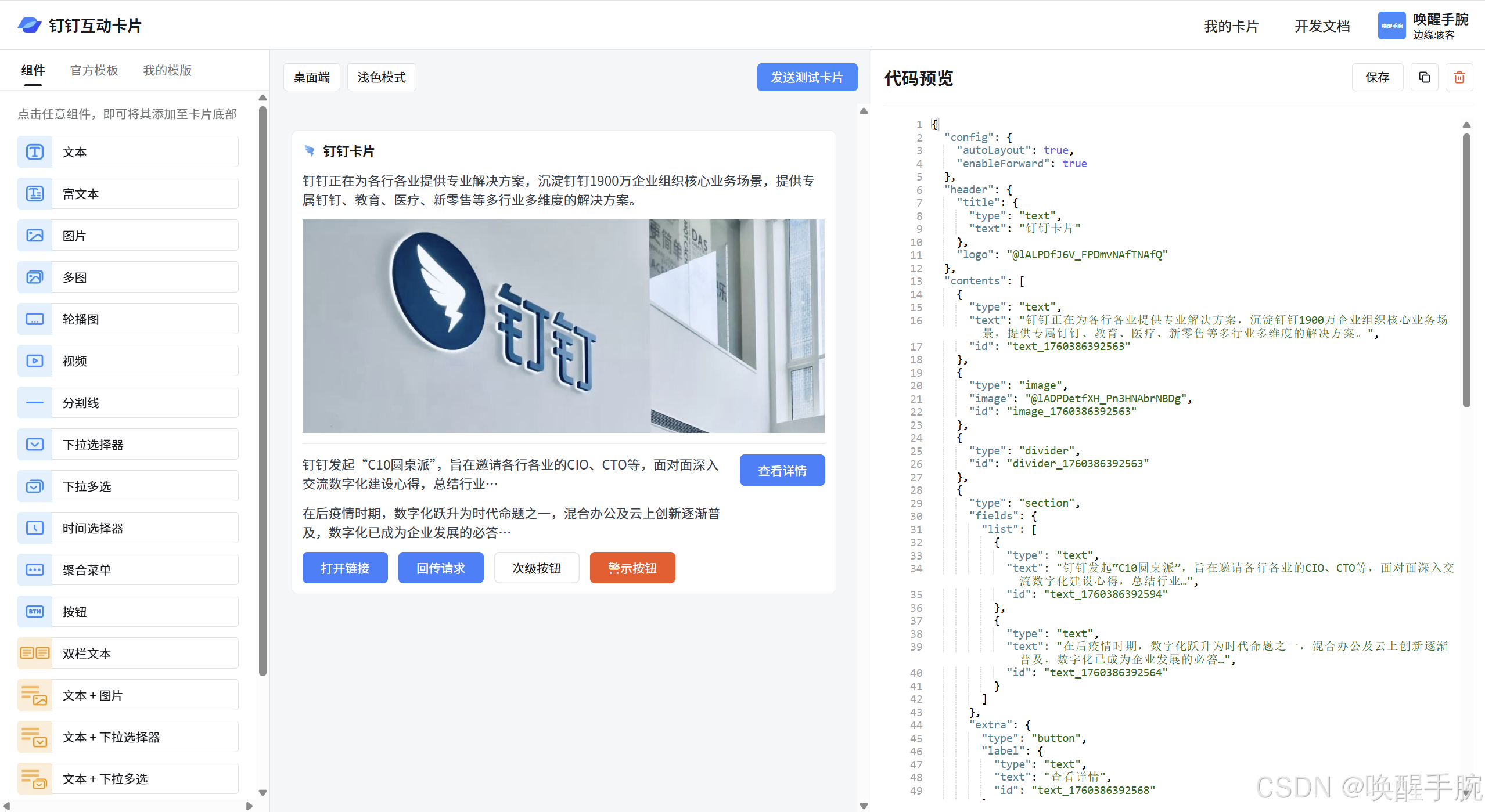
文档地址:https://card.dingtalk.com/card-builder?spm=ding_open_doc.document.0.0.721e41694qaf1r&cardType=normal
自定义机器人:安全设置
为了确保自定义机器人使用过程的安全性,我们提供三种保护措施来保障你的自定义机器人安全运行。这些措施包括:设置自定义关键词、加签(使用签名加密)和 IP 地址(段)。通过这些方法,可以有效保护你的机器人不受恶意攻击