目录
[三、成果如何?29 项测试领先的"六边形战士"](#三、成果如何?29 项测试领先的“六边形战士”)
[四、MiMo-Embodied 的深远意义:打通智能体的"任督二脉"](#四、MiMo-Embodied 的深远意义:打通智能体的“任督二脉”)

🎬 攻城狮7号 :个人主页
🔥 个人专栏 :《AI前沿技术要闻》
⛺️ 君子慎独!
🌈 大家好,欢迎来访我的博客!
⛳️ 此篇文章主要介绍小米具身大模型 MiMo-Embodied
📚 本期文章收录在《AI前沿技术要闻》,大家有兴趣可以自行查看!
⛺️ 欢迎各位 ✔️ 点赞 👍 收藏 ⭐留言 📝!
前言
在人工智能的世界里,长期存在着两个看似平行但目标一致的"物种":一个是力求在室内环境中与物体精准交互的"机器人"(具身智能),另一个则是在复杂动态的道路上安全行驶的"自动驾驶汽车"。它们各自为王,拥有专属的模型和算法。但小米的 MiMo-Embodied 模型,正试图打破这堵墙,它提出了一个大胆的问题:为什么不能用一个大脑,同时教会机器人端茶倒水,并让汽车在路口左转?

一、核心洞察:为何机器人应该学习"开车"?
长期以来,具身智能和自动驾驶被视为两个独立的赛道。一个专注于室内的、相对静态环境下的"交互",比如机器人如何理解"把桌上的红苹果递给我";另一个则专注于户外的、高度动态环境下的"导航",比如汽车如何判断"在下一个路口安全左转"。
然而,小米的研究团队发现了一个被忽视的共通之处:无论是抓取杯子还是驾驶汽车,其底层都依赖于一组高度相似的核心智能。
**(1)空间理解:**机器人需要知道杯子在桌子的哪个位置,汽车需要知道行人在马路的哪条车道上。
**(2)状态预测:**机器人需要预测拿起杯子后水会不会洒,汽车需要预测旁边的车辆是否会突然变道。
**(3)任务规划:**机器人需要规划"伸手-抓握-抬起-移动"的动作序列,汽车需要规划"减速-打灯-观察-转向"的驾驶序列。
**(4)因果推理:**机器人需要理解"如果我碰倒了杯子,水会流出来",汽车需要理解"如果我闯了红灯,可能会发生碰撞"。
这些能力本质上是通用的"物理世界交互逻辑"。区别仅仅在于,机器人面对的是"厘米级"的精细操作,而汽车面对的是"米级"的动态决策。
基于这一洞察,MiMo-Embodied 的核心理念应运而生:与其训练两个"偏科"的专家模型,不如构建一个统一的"通才"模型,让它从室内和室外两种场景的数据中,共同学习和提炼出这套通用的物理世界交互法则。这便是 MiMo-Embodied 试图实现的"1+1>2"的野心。
二、创新核心:一套为通用智能设计的"四步教学法"
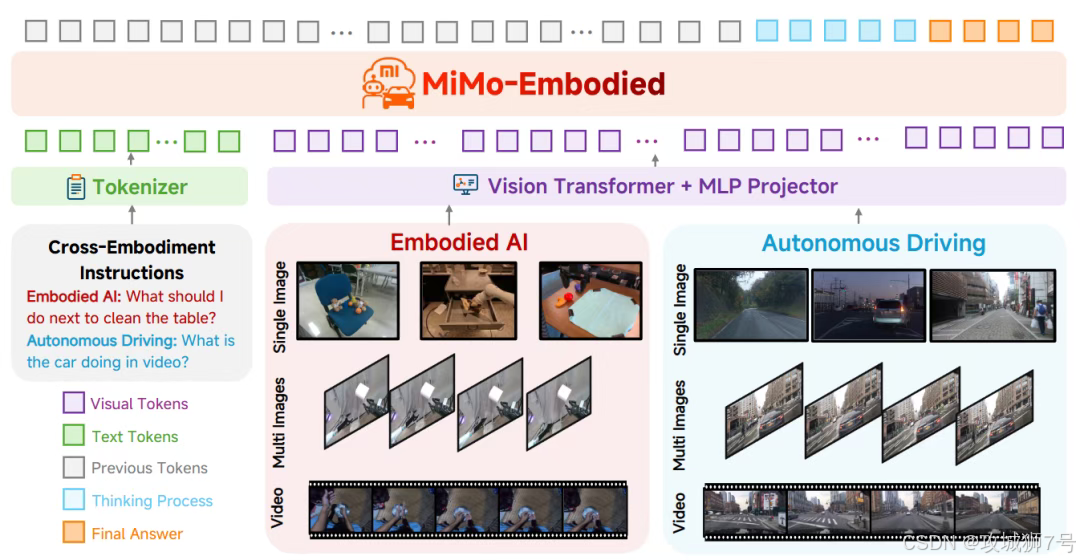
MiMo-Embodied 的模型架构本身并不算石破天惊,它采用了视觉语言模型(VLM)领域相对成熟的"视觉编码器 + 投影器 + 大语言模型"的结构。其真正的创新之处,不在于"骨架",而在于"灵魂"------一套精心设计的、避免"知识冲突"的四阶段渐进式训练策略。
直接将室内机器人数据和室外驾驶数据混在一起进行"大锅烩"式的训练,很容易导致"任务干扰"------模型在学习驾驶时,可能会忘记如何精细地抓取物体。为了解决这个问题,研究团队设计了一套如同人类教育体系般的"课程"。
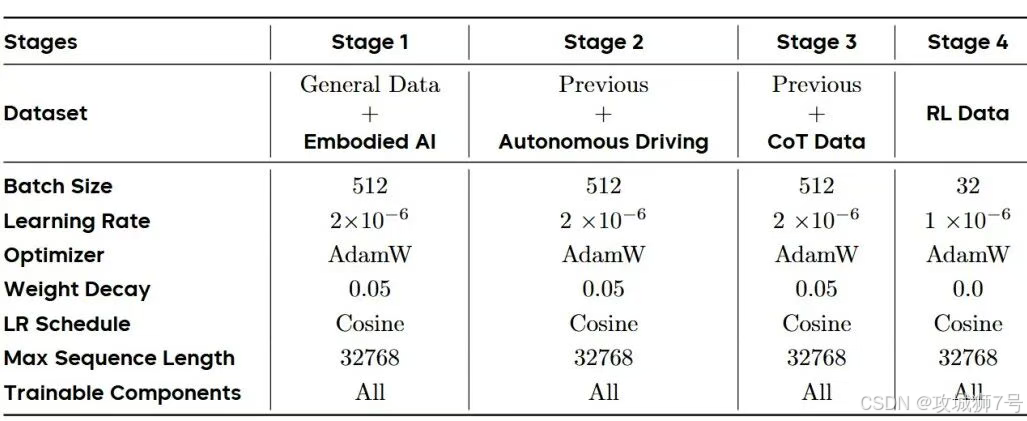
(1)第一阶段:通用与具身知识学习
在这个初始阶段,模型只学习通用的视觉语言知识和具身智能(机器人)数据。这就像让一个孩子先在家庭环境中,学习认识各种物体(桌子、椅子、杯子),理解它们的功能(杯子可以用来喝水),并掌握基本的空间关系(杯子在桌子上)。通过这个阶段,模型建立了对物理世界最基础的认知,包括物体可供性(Affordance)、空间推理和简单的任务规划能力。
(2)第二阶段:自动驾驶知识学习
在模型已经具备了基础的物理世界认知后,再向其"注入"自动驾驶的专用数据。这就像一个已经懂得了基本空间和物体概念的少年,开始进入驾校学习。模型开始接触复杂的动态交通场景、多视角的视频信息,学习理解道路规则、预测行人和车辆的意图。第一阶段建立的静态空间理解能力,为模型快速掌握动态场景分析提供了坚实的基础。
(3)第三-阶段:思维链(CoT)推理微调
学会了"做什么"之后,更要学会"为什么这么做"。在这个阶段,模型被专门训练去学习"思维链"(Chain of Thought)。这意味着,模型在做出决策时,必须像写论述题一样,一步步地把自己的推理过程写出来,例如:"观察到前方有行人→判断行人可能会过马路→因此我需要减速让行"。这极大地增强了模型决策的逻辑性、透明度和可解释性,尤其对于自动驾驶这类安全攸关的场景至关重要。
(4)第四阶段:强化学习(RL)微调
这是最后的"精加工"环节。研究团队利用强化学习算法,针对模型在前几个阶段暴露出的"短板"进行专项优化。比如,如果模型在"精确定位物体坐标"这类任务上表现不佳,就设计一个基于 IoU(交并比)分数的奖励信号,做得越准,奖励越高。如果模型在"多选题"上容易出错,就给予答对的选项正向奖励。这种"哪里不会补哪里"的精细打磨,显著提升了模型在各种任务上的最终输出精度和可靠性。
这套"四步教学法",是 MiMo-Embodied 成功的关键。它将两种看似无关的能力,通过一个循序渐进的课程体系有机地结合起来,最终培养出了一个既懂室内交互、又懂户外驾驶的"跨域通才"。
三、成果如何?29 项测试领先的"六边形战士"
纸上谈兵终究要靠实践检验。小米团队构建了一个极其全面的跨领域评测体系,包含了 17 项具身智能基准和 12 项自动驾驶基准。结果显示,MiMo-Embodied 在这全部 29 项测试中,均取得了全面领先的性能,甚至超过了许多为单一领域专门设计的模型以及像 GPT-4o 这样的通用闭源大模型。
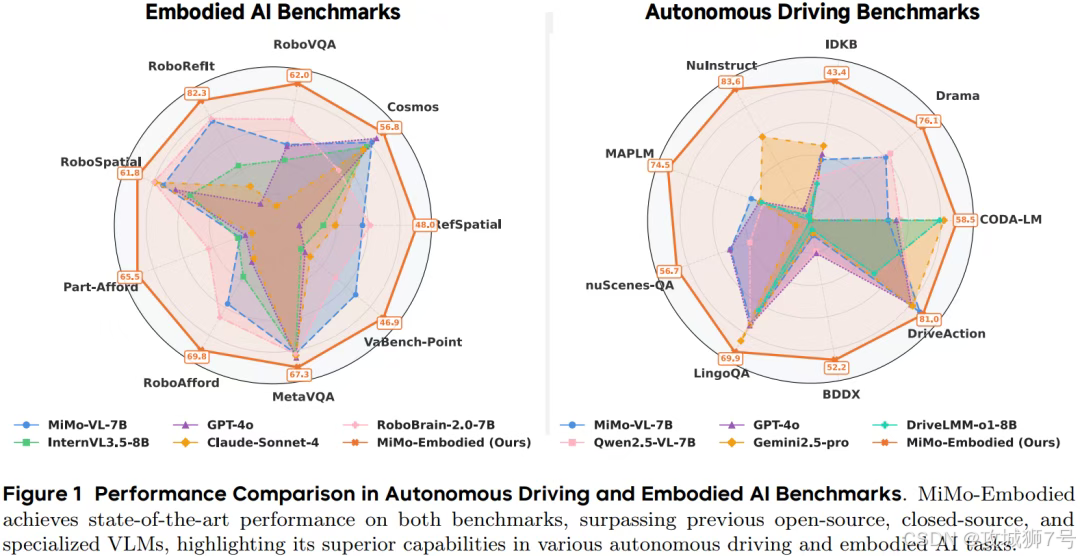
**在具身智能方面:**它能准确地从一堆相似的物体中找到指令描述的目标;能精确识别出杯子的把手等可操作部位;在多步骤的任务规划和复杂的空间关系理解上,展现出强大的推理能力。
**在自动驾驶方面:**它能清晰地理解全景交通场景;能准确定位道路上的关键物体(如救护车);能准确预测其他车辆的行驶意图;并且能生成非常贴近人类驾驶逻辑的安全轨迹,尤其在变道、避让行人等复杂场景中表现突出。
更重要的是,消融实验证明了这套训练方法的科学性。如果只用单一领域数据训练,模型无法实现跨领域泛化;如果直接混合所有数据训练,则会出现任务干扰,性能反而下降。只有采用了这套四阶段的渐进式策略,两大领域的能力才能实现"正向迁移"和"相互增强"。
四、MiMo-Embodied 的深远意义:打通智能体的"任督二脉"
MiMo-Embodied 的价值,远不止于在多个榜单上取得第一。
**(1)验证了通用物理智能的可行性:**它首次在工程上系统性地证明,机器人和自动驾驶的智能是可以统一的。这意味着,未来我们可能不再需要为扫地机器人、工业机械臂和自动驾驶汽车分别开发独立的"大脑",一个统一的、能够理解通用物理规律的基础模型,将成为所有"智能体"的基石。
**(2)提供了一套可复制的范式:**论文提出的四阶段训练路线,为行业构建"通用具身智能体"提供了一条清晰可行的技术路径。它告诉我们,通用智能的构建,可能不是一蹴而就的"涌现",而是一个可以被精心设计的、逐层递进的"教育"过程。
**(3)开源的巨大推动力:**小米将模型、代码和技术报告完全开源,这无疑是为整个具身智能和自动驾驶社区提供了一把强大的"钥匙"。中小企业和学术机构可以在此基础上,快速开发出能够适应多场景的智能体,极大地加速整个行业的创新进程。
结论:迈向"万物智能"的第一步
MiMo-Embodied 的发布,是具身智能领域的一次重要里程碑。它像一位探路者,成功地在机器人(室内)和自动驾驶(户外)这两个看似独立的智能世界之间,架起了一座坚实的桥梁。
它告诉我们,"智能体"的边界正在被打破。未来的电动车会越来越像一个"带轮子的机器人",而家用机器人则会越来越像一个"有四肢的智能体"。它们的核心,都将是一个能够理解和预测物理世界、并做出合理规划的统一大脑。
当然,MiMo-Embodied 仍然面临挑战。目前其性能主要在学术基准和仿真环境中得到验证,在真实物理世界中的鲁棒性和长期稳定性仍需时间的考验。但这无疑是迈向"通用物理智能"------那个我们梦想中AI能真正融入并服务于我们物理世界的未来------所迈出的坚实而关键的一步。
项目地址:https://github.com/XiaomiMiMo/MiMo-Embodied
论文链接:https://arxiv.org/abs/2511.16518
看到这里了还不给博主点一个:
⛳️ 点赞☀️收藏 ⭐️ 关注!
💛 💙 💜 ❤️ 💚💓 💗 💕 💞 💘 💖
再次感谢大家的支持!
你们的点赞就是博主更新最大的动力!