背景意义
随着科技的迅猛发展和消费者购物习惯的改变,无人零售逐渐成为现代商业的一种新兴模式。无人零售自动售卖机以其便捷性和高效性,受到了越来越多消费者的青睐。然而,自动售卖机在商品管理和库存监控方面仍面临诸多挑战,尤其是在饮料产品的实时检测与识别方面。为了解决这一问题,基于改进YOLOv11的饮料检测系统应运而生。
YOLO(You Only Look Once)系列模型以其快速且准确的目标检测能力而广泛应用于各种计算机视觉任务。YOLOv11作为该系列的最新版本,进一步提升了检测精度和速度,适合在资源有限的自动售卖机环境中进行实时处理。针对饮料产品的检测,研究团队选取了包含2200张图像的"soda bottles"数据集,数据集中涵盖了多种知名饮料品牌,如可口可乐、芬达和雪碧等。该数据集的单一类别特性,使得模型在训练过程中能够集中精力于特定对象的识别,从而提高检测的准确性。
本研究的意义在于,通过改进YOLOv11模型,构建一个高效的饮料检测系统,不仅能够实时监控自动售卖机内的饮料库存,还能通过数据分析优化补货策略,提升运营效率。此外,该系统的成功实施将为无人零售行业提供一种可行的技术解决方案,推动无人零售的进一步发展。同时,基于深度学习的目标检测技术在其他领域的应用也将得到启示,具有广泛的推广价值。通过本项目的研究,期望能够为无人零售行业的智能化转型提供坚实的技术支持。
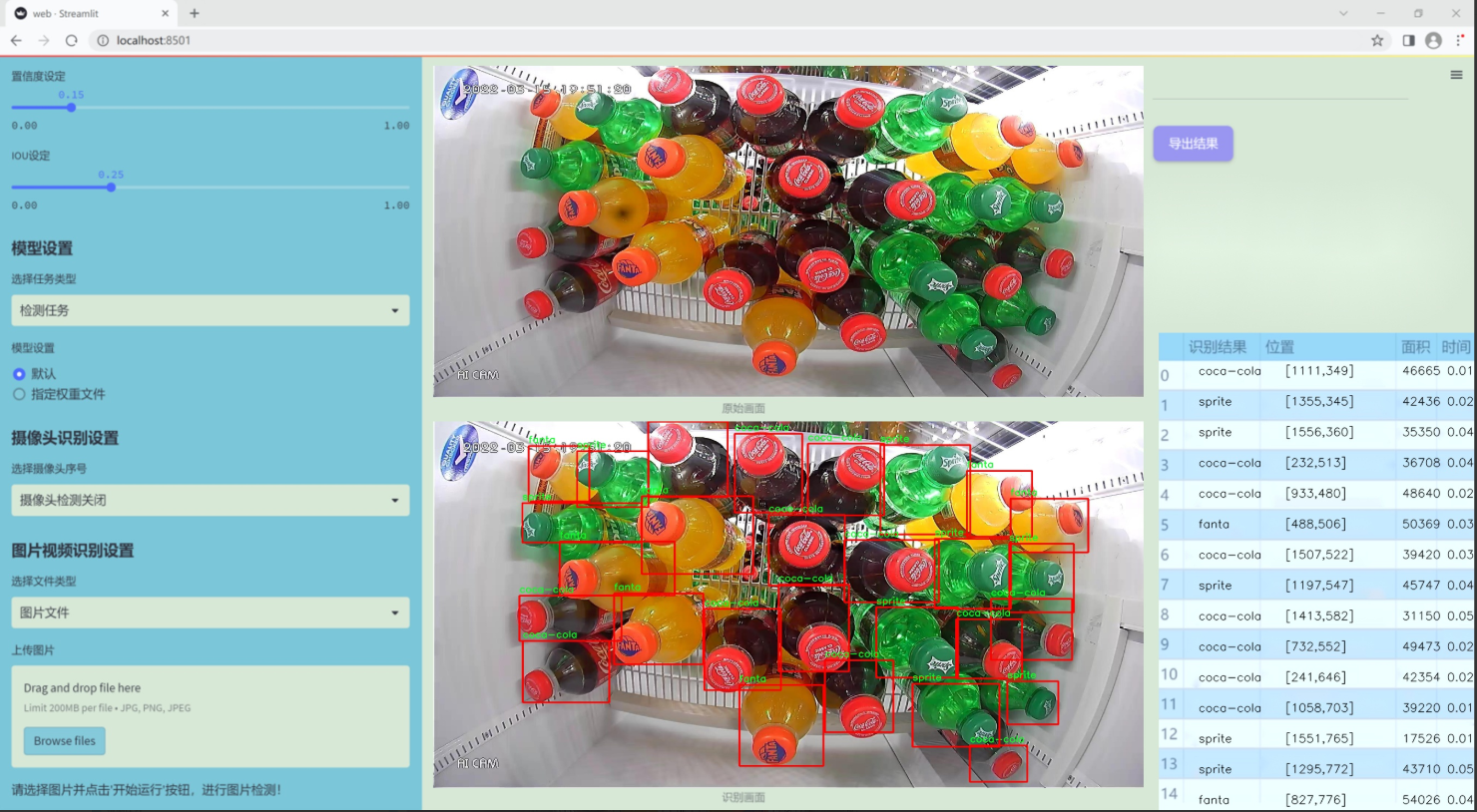
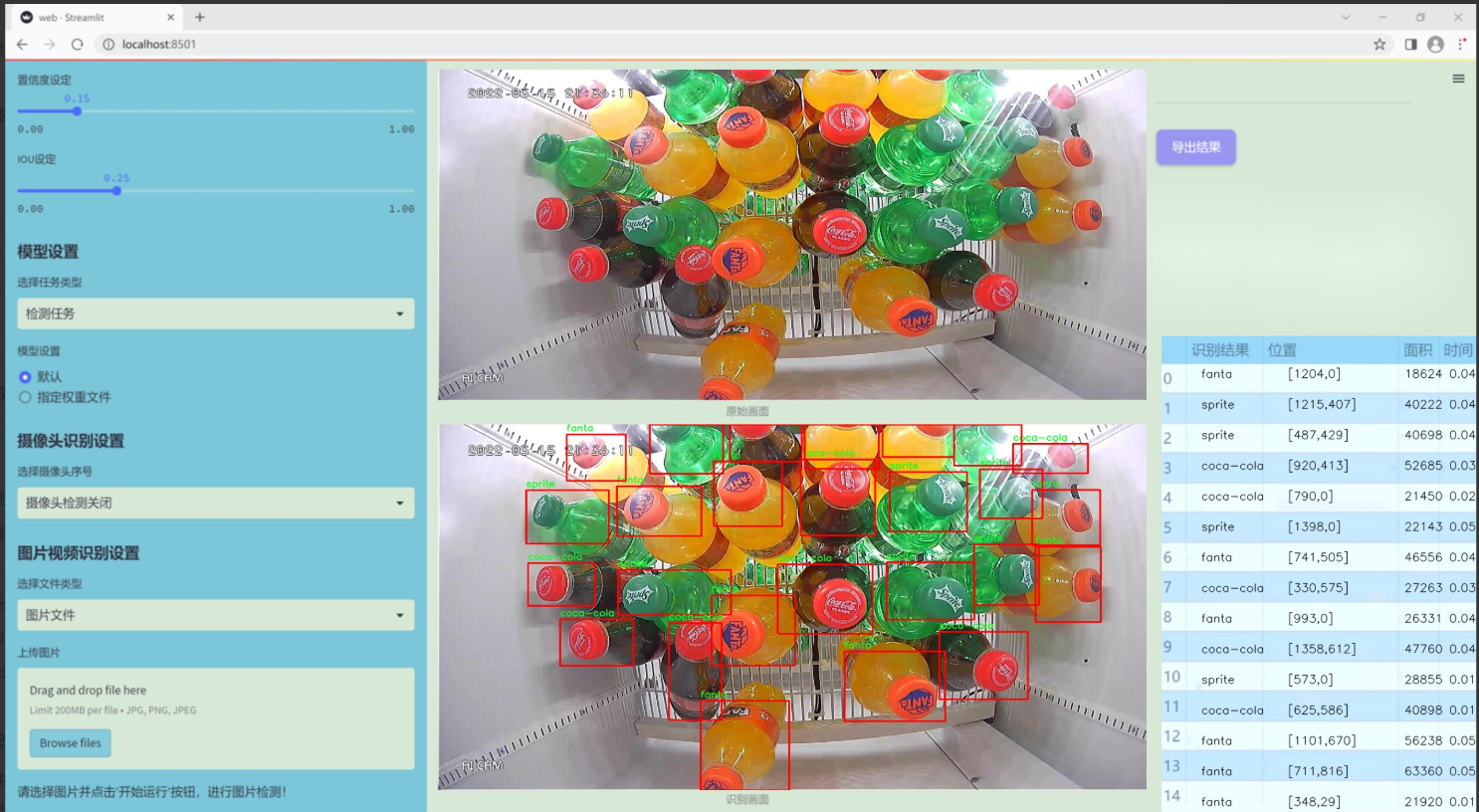
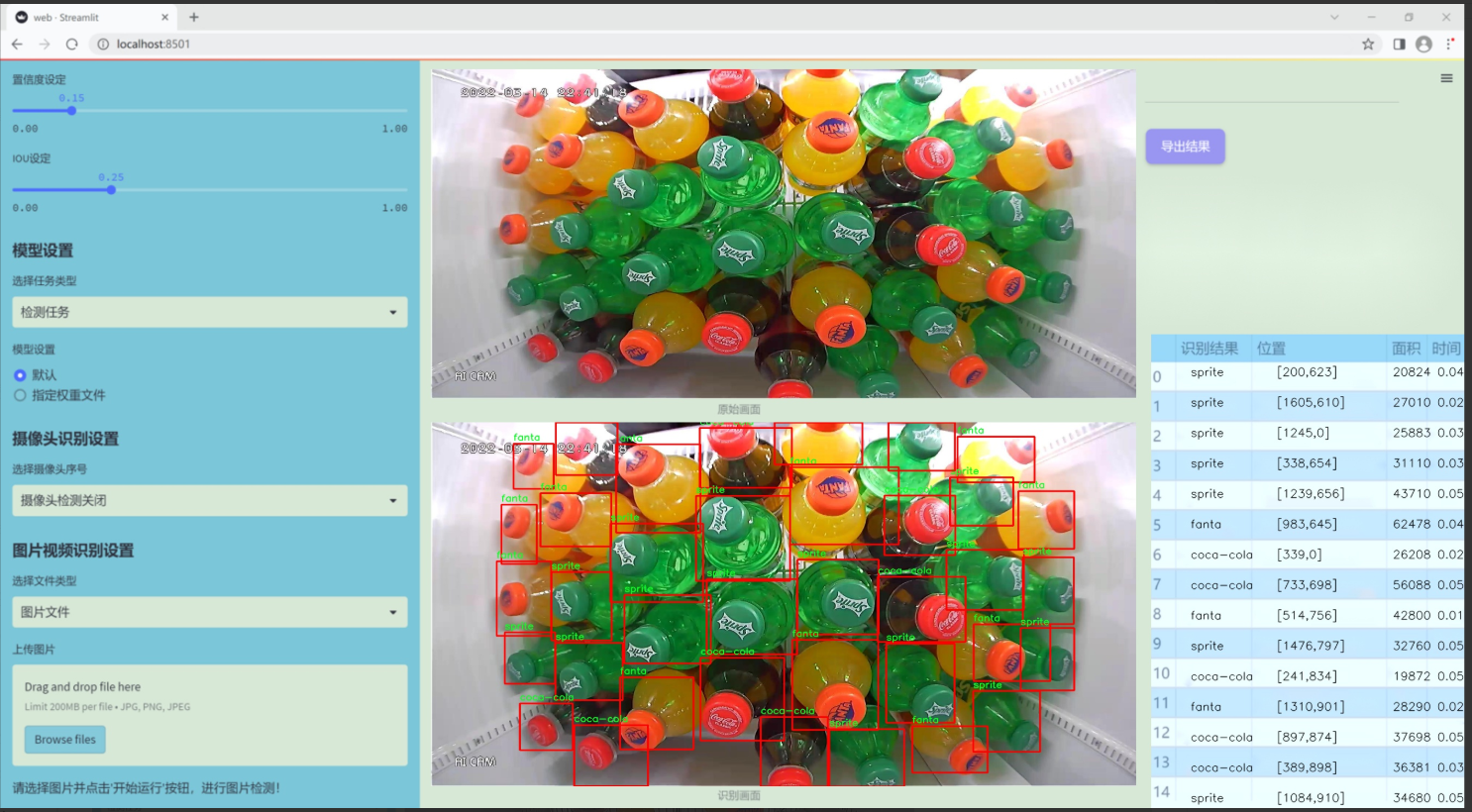
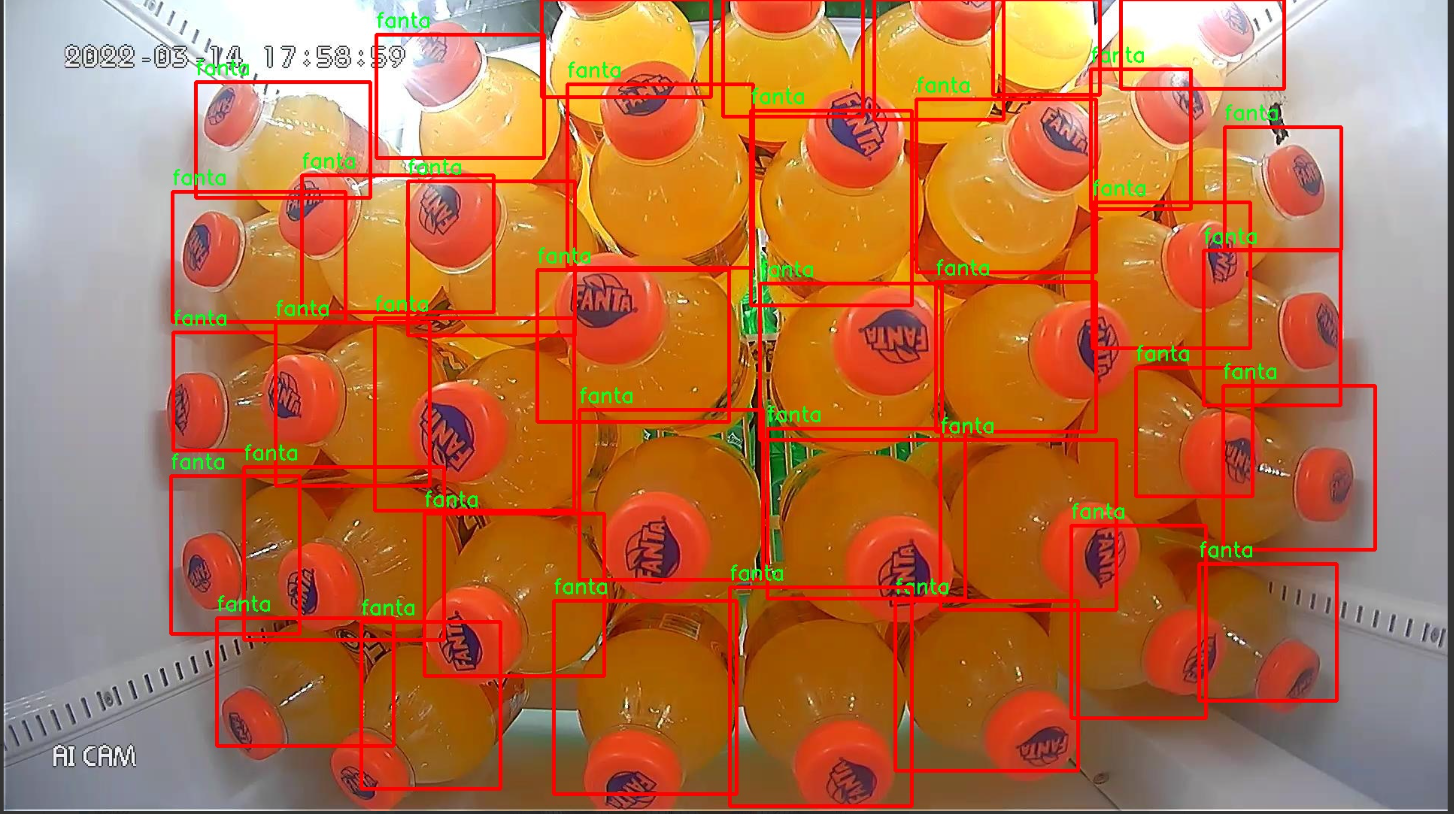
图片效果
数据集信息
本项目所使用的数据集名为"soda bottles",专门用于训练和改进YOLOv11模型,以实现无人零售自动售卖机中的饮料检测系统。该数据集包含三种主要类别的饮料,分别是可口可乐(coca-cola)、芬达(fanta)和雪碧(sprite)。这些类别的选择不仅反映了市场上最受欢迎的饮料品牌,也为模型的训练提供了丰富的样本,确保其在实际应用中的准确性和可靠性。
数据集的构建过程经过精心设计,确保每个类别的样本数量均衡且多样化,以便模型能够有效学习到不同饮料的特征。数据集中包含了各种环境下的饮料图像,包括不同的光照条件、拍摄角度和背景,这些因素都可能影响模型的识别能力。因此,数据集中的图像涵盖了多种场景,以增强模型的泛化能力,确保其在实际应用中能够准确识别和分类。
此外,数据集还经过了详细的标注,每张图像中的饮料瓶都被精确框定,提供了必要的位置信息。这一过程不仅提高了数据集的质量,也为YOLOv11模型的训练提供了坚实的基础。通过使用"soda bottles"数据集,我们期望能够提升无人零售自动售卖机的饮料检测精度,从而优化消费者的购物体验,推动无人零售技术的发展。
综上所述,"soda bottles"数据集为本项目提供了丰富的训练素材和高质量的标注信息,确保了模型在实际应用中的有效性和准确性,为无人零售领域的创新与发展奠定了坚实的基础。




核心代码
以下是代码中最核心的部分,并附上详细的中文注释:
import torch
import torch.nn.functional as F
def build_selective_scan_fn(selective_scan_cuda: object = None, mode="mamba_ssm", tag=None):
"""
构建选择性扫描函数的工厂函数。
参数:
selective_scan_cuda: CUDA实现的选择性扫描函数
mode: 模式选择
tag: 标签,用于标识不同的选择性扫描实现
"""
class SelectiveScanFn(torch.autograd.Function):
@staticmethod
def forward(ctx, u, delta, A, B, C, D=None, z=None, delta_bias=None, delta_softplus=False, return_last_state=False, nrows=1, backnrows=-1):
"""
前向传播函数,执行选择性扫描操作。
参数:
ctx: 上下文对象,用于保存状态
u: 输入张量
delta: 增量张量
A, B, C: 权重张量
D: 可选的偏置张量
z: 可选的张量
delta_bias: 可选的增量偏置
delta_softplus: 是否应用softplus激活
return_last_state: 是否返回最后状态
nrows: 行数
backnrows: 回溯行数
返回:
输出张量或输出张量和最后状态的元组
"""
# 确保输入张量是连续的
if u.stride(-1) != 1:
u = u.contiguous()
if delta.stride(-1) != 1:
delta = delta.contiguous()
if D is not None:
D = D.contiguous()
if B.stride(-1) != 1:
B = B.contiguous()
if C.stride(-1) != 1:
C = C.contiguous()
if z is not None and z.stride(-1) != 1:
z = z.contiguous()
# 处理张量的维度和形状
if B.dim() == 3:
B = rearrange(B, "b dstate l -> b 1 dstate l")
ctx.squeeze_B = True
if C.dim() == 3:
C = rearrange(C, "b dstate l -> b 1 dstate l")
ctx.squeeze_C = True
# 检查输入形状的有效性
assert u.shape[1] % (B.shape[1] * nrows) == 0
assert nrows in [1, 2, 3, 4] # 限制行数为1到4
if backnrows > 0:
assert u.shape[1] % (B.shape[1] * backnrows) == 0
assert backnrows in [1, 2, 3, 4] # 限制回溯行数为1到4
else:
backnrows = nrows
ctx.backnrows = backnrows
# 调用CUDA实现的选择性扫描前向函数
if mode in ["mamba_ssm"]:
out, x, *rest = selective_scan_cuda.fwd(u, delta, A, B, C, D, z, delta_bias, delta_softplus)
else:
raise NotImplementedError
# 保存状态以便反向传播
ctx.delta_softplus = delta_softplus
ctx.has_z = z is not None
last_state = x[:, :, -1, 1::2] # 获取最后状态
# 返回输出或输出和最后状态
ctx.save_for_backward(u, delta, A, B, C, D, delta_bias, x)
return out if not return_last_state else (out, last_state)
@staticmethod
def backward(ctx, dout, *args):
"""
反向传播函数,计算梯度。
参数:
ctx: 上下文对象
dout: 输出的梯度
返回:
输入张量的梯度
"""
u, delta, A, B, C, D, delta_bias, x = ctx.saved_tensors
# 调用CUDA实现的选择性扫描反向函数
du, ddelta, dA, dB, dC, dD, ddelta_bias, *rest = selective_scan_cuda.bwd(
u, delta, A, B, C, D, delta_bias, dout, x, ctx.delta_softplus, ctx.backnrows
)
return (du, ddelta, dA, dB, dC, dD if D is not None else None, None, ddelta_bias if delta_bias is not None else None)
def selective_scan_fn(u, delta, A, B, C, D=None, z=None, delta_bias=None, delta_softplus=False, return_last_state=False, nrows=1, backnrows=-1):
"""
封装选择性扫描函数的调用。
"""
return SelectiveScanFn.apply(u, delta, A, B, C, D, z, delta_bias, delta_softplus, return_last_state, nrows, backnrows)
return selective_scan_fn代码说明:
导入必要的库:导入了PyTorch和其功能模块。
build_selective_scan_fn函数:构建选择性扫描函数的工厂函数,接收CUDA实现和模式作为参数。
SelectiveScanFn类:继承自torch.autograd.Function,实现了前向和反向传播的方法。
forward方法:执行选择性扫描的前向计算,处理输入张量的形状和连续性,调用CUDA实现的前向函数,并保存必要的状态以供反向传播使用。
backward方法:计算梯度,调用CUDA实现的反向函数,并返回输入张量的梯度。
selective_scan_fn函数:封装了对SelectiveScanFn的调用,提供了一个简单的接口。
该代码实现了选择性扫描的前向和反向传播功能,适用于深度学习中的动态计算图。
这个程序文件 test_selective_scan_speed.py 是一个用于测试选择性扫描(Selective Scan)算法性能的脚本,主要依赖于 PyTorch 库进行深度学习计算。代码中包含了选择性扫描的前向和反向传播实现,以及对不同实现的性能测试。
首先,文件导入了必要的库,包括 torch、torch.nn.functional、pytest、time 等。接着,定义了一个构建选择性扫描函数的工厂函数 build_selective_scan_fn,该函数接收一个 CUDA 实现的选择性扫描函数和其他参数,返回一个自定义的 PyTorch 函数 selective_scan_fn。这个函数内部定义了一个 SelectiveScanFn 类,继承自 torch.autograd.Function,实现了前向传播和反向传播的方法。
在 SelectiveScanFn 的 forward 方法中,首先对输入张量进行处理,确保它们是连续的,并根据需要调整维度。接着,依据不同的模式(如 mamba_ssm、sscore 等)调用相应的 CUDA 实现进行前向计算。最后,保存必要的中间结果以供反向传播使用,并返回输出结果。
backward 方法则实现了反向传播的逻辑,计算梯度并返回给定的输入张量的梯度。
文件中还定义了几个选择性扫描的参考实现函数 selective_scan_ref、selective_scan_easy 和 selective_scan_easy_v2,这些函数实现了选择性扫描的核心算法,支持不同的输入格式和参数设置。
在 test_speed 函数中,设置了一系列参数,包括数据类型、序列长度、批量大小等。接着,生成了测试所需的随机输入数据,并使用不同的选择性扫描实现进行性能测试。通过记录每个实现的运行时间,比较它们的性能。
最后,程序调用 test_speed 函数开始性能测试,并输出每个实现的前向和前向反向计算的时间。这种测试可以帮助开发者了解不同实现的效率,并在实际应用中选择最佳的实现方案。
10.4 kacn_conv.py
以下是代码中最核心的部分,并附上详细的中文注释:
import torch
import torch.nn as nn
class KACNConvNDLayer(nn.Module):
def init (self, conv_class, norm_class, input_dim, output_dim, degree, kernel_size,
groups=1, padding=0, stride=1, dilation=1,
ndim: int = 2, dropout=0.0):
super(KACNConvNDLayer, self).init()
# 初始化参数
self.inputdim = input_dim # 输入维度
self.outdim = output_dim # 输出维度
self.degree = degree # 多项式的度数
self.kernel_size = kernel_size # 卷积核大小
self.padding = padding # 填充
self.stride = stride # 步幅
self.dilation = dilation # 膨胀
self.groups = groups # 分组卷积的组数
self.ndim = ndim # 数据的维度(1D, 2D, 3D)
self.dropout = None # Dropout层
# 根据维度选择合适的Dropout层
if dropout > 0:
if ndim == 1:
self.dropout = nn.Dropout1d(p=dropout)
elif ndim == 2:
self.dropout = nn.Dropout2d(p=dropout)
elif ndim == 3:
self.dropout = nn.Dropout3d(p=dropout)
# 检查分组参数的有效性
if groups <= 0:
raise ValueError('groups must be a positive integer')
if input_dim % groups != 0:
raise ValueError('input_dim must be divisible by groups')
if output_dim % groups != 0:
raise ValueError('output_dim must be divisible by groups')
# 创建归一化层
self.layer_norm = nn.ModuleList([norm_class(output_dim // groups) for _ in range(groups)])
# 创建多项式卷积层
self.poly_conv = nn.ModuleList([conv_class((degree + 1) * input_dim // groups,
output_dim // groups,
kernel_size,
stride,
padding,
dilation,
groups=1,
bias=False) for _ in range(groups)])
# 创建一个缓冲区,用于存储多项式的系数
arange_buffer_size = (1, 1, -1,) + tuple(1 for _ in range(ndim))
self.register_buffer("arange", torch.arange(0, degree + 1, 1).view(*arange_buffer_size))
# 使用Kaiming均匀分布初始化卷积层的权重
for conv_layer in self.poly_conv:
nn.init.normal_(conv_layer.weight, mean=0.0, std=1 / (input_dim * (degree + 1) * kernel_size ** ndim))
def forward_kacn(self, x, group_index):
# 前向传播,处理每个组的输入
x = torch.tanh(x) # 应用tanh激活函数
x = x.acos().unsqueeze(2) # 计算反余弦并增加一个维度
x = (x * self.arange).flatten(1, 2) # 乘以多项式系数并展平
x = x.cos() # 计算余弦
x = self.poly_conv[group_index](x) # 通过对应的卷积层
x = self.layer_norm[group_index](x) # 归一化
if self.dropout is not None:
x = self.dropout(x) # 应用Dropout
return x
def forward(self, x):
# 前向传播,处理整个输入
split_x = torch.split(x, self.inputdim // self.groups, dim=1) # 按组分割输入
output = []
for group_ind, _x in enumerate(split_x):
y = self.forward_kacn(_x.clone(), group_ind) # 对每个组调用forward_kacn
output.append(y.clone()) # 收集输出
y = torch.cat(output, dim=1) # 合并所有组的输出
return y代码核心部分说明:
KACNConvNDLayer类:这是一个自定义的卷积层,支持多维卷积(1D、2D、3D),并结合了多项式卷积和归一化。
初始化方法:初始化卷积层、归一化层和Dropout层,并进行参数有效性检查。
forward_kacn方法:实现了对输入的前向传播,包含了激活函数、卷积和归一化等操作。
forward方法:处理整个输入,将其分割为多个组,并对每个组调用forward_kacn进行处理,最后合并输出。
这个程序文件定义了一个名为 kacn_conv.py 的模块,主要实现了一个新的卷积层 KACNConvNDLayer 及其针对不同维度的特化版本(1D、2D 和 3D)。该模块使用 PyTorch 框架构建深度学习模型。
首先,KACNConvNDLayer 类是一个自定义的神经网络层,继承自 nn.Module。在初始化方法中,用户可以传入卷积类、归一化类、输入和输出维度、卷积的次数(degree)、卷积核大小等参数。该类还支持分组卷积(groups)、填充(padding)、步幅(stride)、扩张(dilation)以及 dropout 的设置。初始化过程中,程序会检查分组数是否为正整数,并确保输入和输出维度可以被分组数整除。
在初始化时,KACNConvNDLayer 会创建多个卷积层和归一化层的实例,存储在 ModuleList 中,以便后续使用。卷积层的权重会使用 Kaiming 正态分布进行初始化,以便于模型的训练。
forward_kacn 方法实现了该层的前向传播逻辑。首先对输入进行非线性激活(使用双曲正切函数),然后通过反余弦函数处理,并进行维度变换。接着,使用指定的卷积层对处理后的数据进行卷积操作,并应用归一化层。若设置了 dropout,则会在此处应用。
forward 方法负责处理输入数据,首先将输入按照分组进行拆分,然后对每个分组调用 forward_kacn 方法进行处理,最后将所有分组的输出拼接在一起,形成最终的输出。
接下来,KACNConv3DLayer、KACNConv2DLayer 和 KACNConv1DLayer 类分别是 KACNConvNDLayer 的特化版本,分别用于处理三维、二维和一维的卷积操作。它们在初始化时调用父类的构造函数,并传入相应的卷积和归一化类(如 nn.Conv3d、nn.Conv2d 和 nn.Conv1d)以及其他参数。
总体而言,这个模块实现了一个灵活且可扩展的卷积层设计,支持多种维度的卷积操作,并结合了归一化和 dropout 机制,适用于构建复杂的深度学习模型。
源码文件

源码获取
欢迎大家点赞、收藏、关注、评论 啦 、查看👇🏻获取联系方式