顶点法向量估计
- 前言
- [1. 官方文档](#1. 官方文档)
- [2. 基础概念简介](#2. 基础概念简介)
- [3. 例程拆解和复现](#3. 例程拆解和复现)
-
- [3.1 先跑例程](#3.1 先跑例程)
- [3.2 例程拆解](#3.2 例程拆解)
- [4. 补充:访问顶点法向量](#4. 补充:访问顶点法向量)
- 后记
- 参考资料
前言
点云光照渲染、表面分割、曲面重建等场景,都离不开顶点法向量估计。
在Ch.3聚焦借助Open3D封装好的API进行顶点法向量估计。
本文仍为学习笔记,非系统教程,建议根据需求跳转到对应部分阅读。
文末参考资料我放了链接,可直接跳转到相关网站。
1. 官方文档

点云的另一项基本操作是点法线估计。按下 N 键可查看点法线。减号(-)和加号(+)键可用于控制法线的长度。

estimate_normals为每个点计算法线。该函数找到相邻的点,然后使用协方差分析来计算相邻点的主轴。

该函数接受一个 KDTreeSearchParamHybrid 类的实例作为参数。两个关键参数 radius = 0.1 和 max_nn = 30 分别指定搜索半径和最大近邻数和。它具备 10 厘米的搜索半径,并且为节省计算时间,最多只考虑 30 个邻域。

注意:
协方差分析算法会生成两个相反的方向作为法向量候选。在不了解几何结构全局信息的情况下,这两个方向都可能是正确的,这被称为法向量定向问题。如果原始法向量存在,Open3D 会尝试将法向量定向为与原始法向量对齐;否则,Open3D 会随机猜测法向量方向。如果需要关注法向量的定向,需要调用进一步的定向函数,例如 orient_normals_to_align_with_direction(将法向量对齐到指定方向)和 orient_normals_towards_camera_location(将法向量朝向相机位置)。
2. 基础概念简介
(在此只对概念做简单的介绍,想要深入了解的可以参考文末的参考文献)
顶点法向量估计
很多三维任务,例如光照渲染、三维重建、特征提取与匹配、物理模拟都需要用到法向信息,但是原始的点云数据往往不带法向数据,所以需要通过估计获取。
法向(normal),也叫法线,是垂直于曲面上某一点切平面的向量。
顶点法向即该顶点所在表面或者局部集合结构的法向。对于点云数据,只有离散的点,通过算法计算领域点的方式来估计顶点的法向。
顶点法向估计主要有以下几步:
- 确定目标点
- 对目标点用KDTree 搜索算法 找到临近的几个点
- 进行PCA分析
- 到特征值最小的特征向量为法向量
PCA
PCA即主成分分析,是一种降维方法,可在降低数据维度的同时,尽可能保留数据的关键信息,常用于数据压缩、特征提取等任务。
协方差矩阵
协方差矩阵是描述多维数据各维度间线性关系与离散程度的矩阵,能体现维度间的相关性和单个维度的离散性。
KDTreeSearchParamHybrid
KDTreeSearchParamHybrid是 Open3D 中用于邻域搜索的混合策略,在点云的 KDTree 结构中,为每个点搜索 距离不超过radius且数量不超过max_nn 的邻域点,平衡搜索范围与计算效率。
KDTree
KDTree 是一种适用于多维空间的树形数据结构,通过在不同维度上递归划分空间构建二叉树,能高效实现近邻搜索和范围查询,常用于点云处理、机器学习等场景中快速查找数据点的邻居。
3. 例程拆解和复现
3.1 先跑例程
python
import open3d as o3d
import numpy as np
# ch.1 里的点云读取
ply_point_cloud = o3d.data.PLYPointCloud()
pcd = o3d.io.read_point_cloud(ply_point_cloud.path)
print(pcd)
print(np.asarray(pcd.points))
# ch.2里的体素下采样
print("Downsample the point cloud with a voxel of 0.05")
downpcd = pcd.voxel_down_sample(voxel_size=0.05)
# 这块是新增的法向量估计
print("Recompute the normal of the downsampled point cloud")
downpcd.estimate_normals(
search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.1, max_nn=30))
# 显示
o3d.visualization.draw_geometries([downpcd],
zoom=0.3412,
front=[0.4257, -0.2125, -0.8795],
lookat=[2.6172, 2.0475, 1.532],
up=[-0.0694, -0.9768, 0.2024],
point_show_normal=True)运行后,终端会输出点云的基本信息,同时弹出可视化窗口,如下:
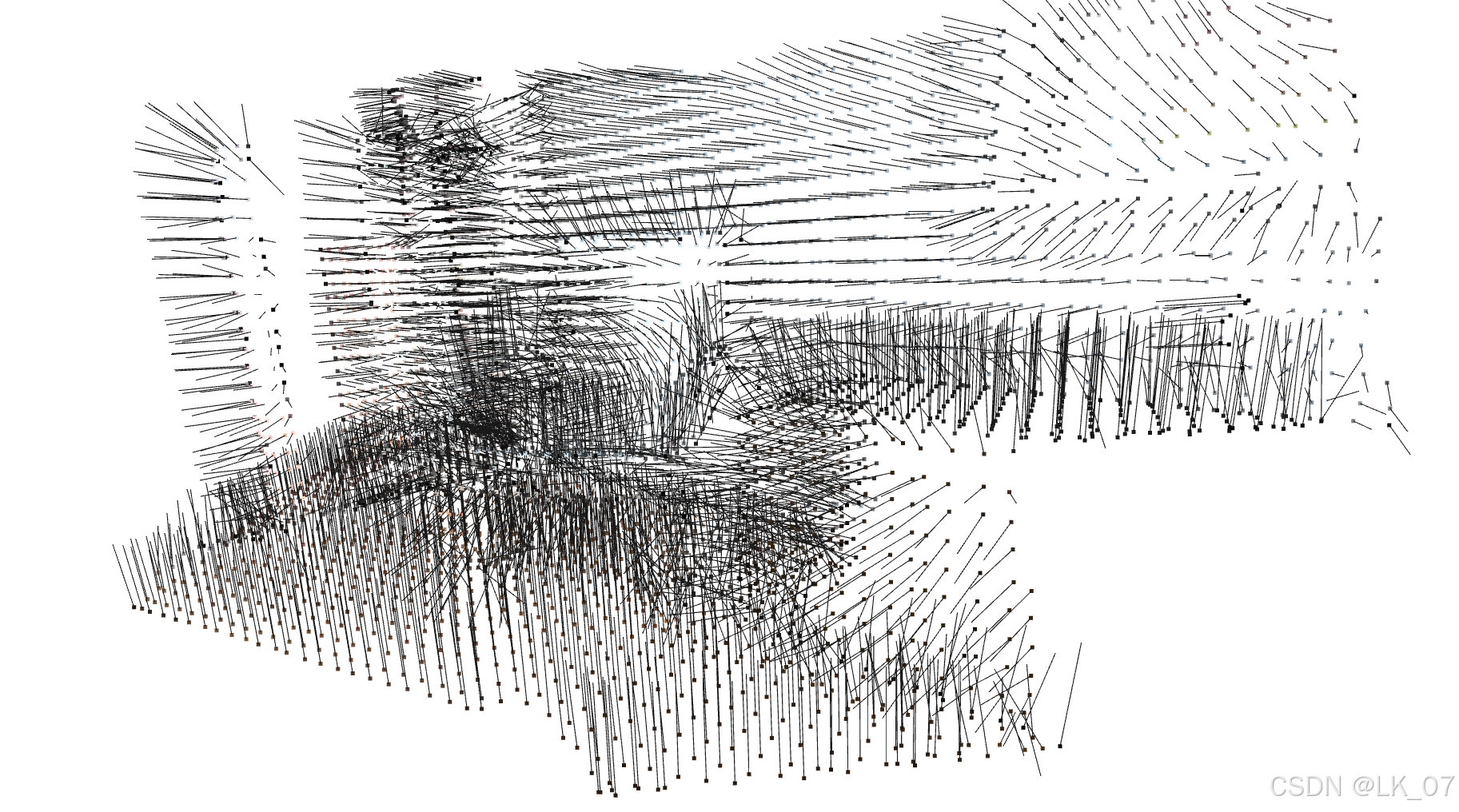
发现每一个点都有一根线指出,这就是该点的法向量,表示点的朝向。
3.2 例程拆解
在例程中法向量估计分为两步骤:
- 配置邻域搜索规则
- 执行法向量计算
底层是如何操作的,现阶段可以不用深究,直接调用Open3D给的API就可以达到我们的目标。
下面介绍一下我们要调用的关键API:
python
o3d.geometry.KDTreeSearchParamHybrid(radius, max_nn)这是 Open3D 用于定义 "如何找邻域点" 的类。
通过两个参数平衡搜索范围与计算效率:
- radius:邻域搜索的半径。
- max_nn:每个点最多选多少个邻域点。
python
estimate_normals(search_param)这是 PointCloud 对象的方法,作用是为点云中的每个点计算法向量。
只需把上面配置好的 "邻域搜索规则",即 KDTreeSearchParamHybrid 生成的 search_param传入,它会自动完成 找邻域点 → 拟合局部平面 → 求解法向量 的全流程。
还有一点要补充的是 o3d.visualization.draw_geometries 的参数,如下图是我们在ch.1中已经介绍过的它的关键参数。
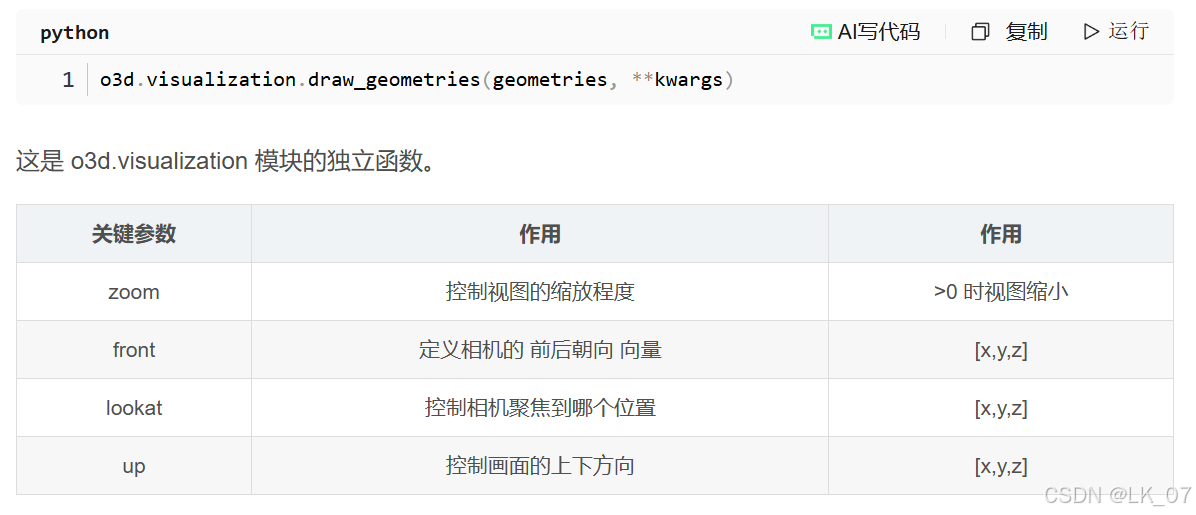
通过观察例程我们发现,在调用 o3d.visualization.draw_geometries 时多出来一个参数 point_show_normal 。
它用于控制是否显示点云的法线 。为True时,显示法线;为False时,不显示。
运行下方代码,将得到例程的结果
python
import open3d as o3d
import numpy as np
ply_point_cloud = o3d.data.PLYPointCloud()
pcd = o3d.io.read_point_cloud(ply_point_cloud.path)
print(pcd)
print(np.asarray(pcd.points))
print("Downsample the point cloud with a voxel of 0.05")
downpcd = pcd.voxel_down_sample(voxel_size = 0.05)
print("Recompute the normal of the downsampled point cloud")
radius = 0.1
max_nn = 30
downpcd.estimate_normals(
search_param=o3d.geometry.KDTreeSearchParamHybrid(radius, max_nn))
o3d.visualization.draw_geometries([downpcd],
zoom=0.3412,
front=[0.4257, -0.2125, -0.8795],
lookat=[2.6172, 2.0475, 1.532],
up=[-0.0694, -0.9768, 0.2024],
point_show_normal=True)我们可以尝试更改参数,看看实际的变化:
python
radius = 0.1
max_nn = 3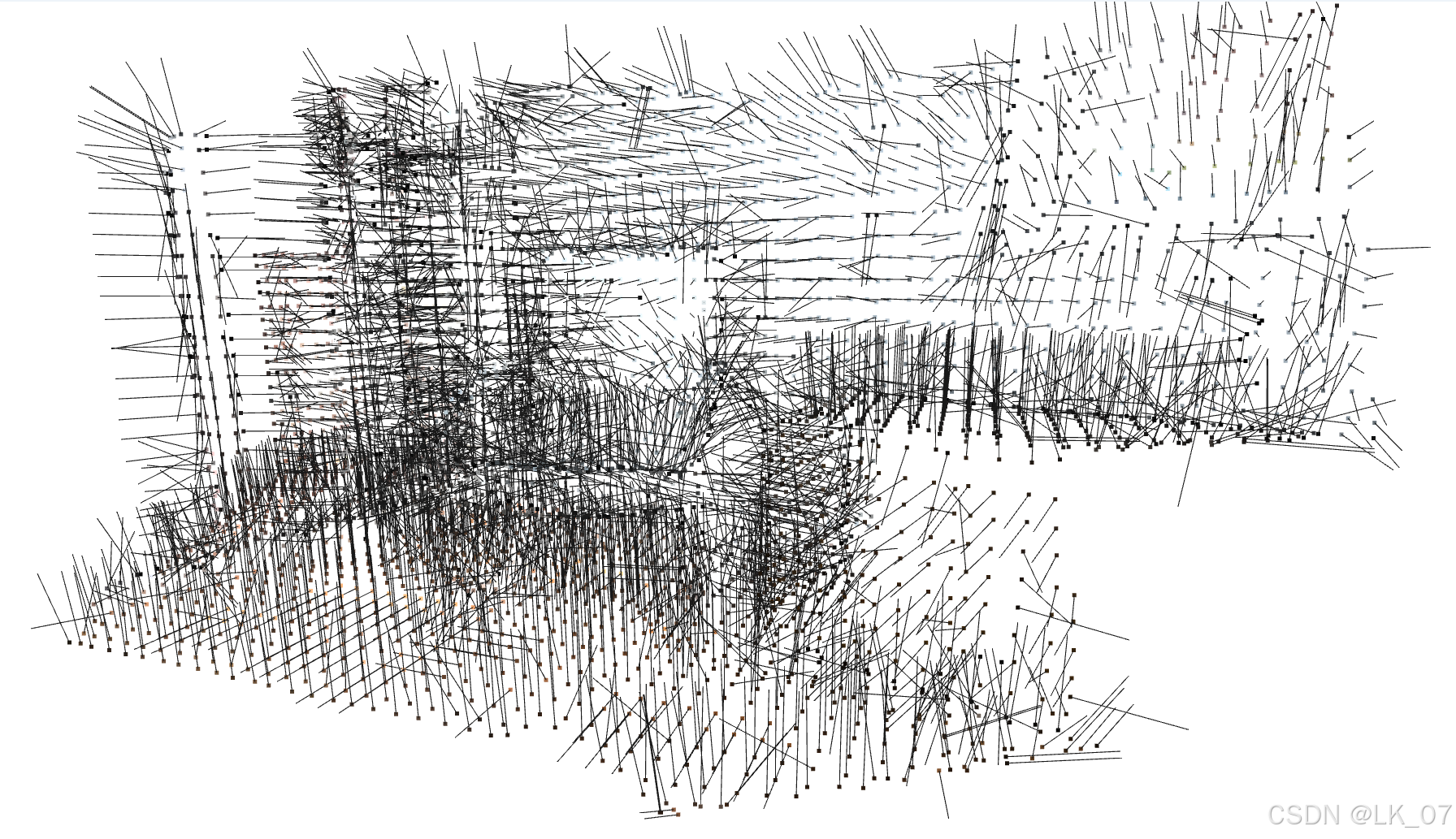
python
radius = 1
max_nn = 100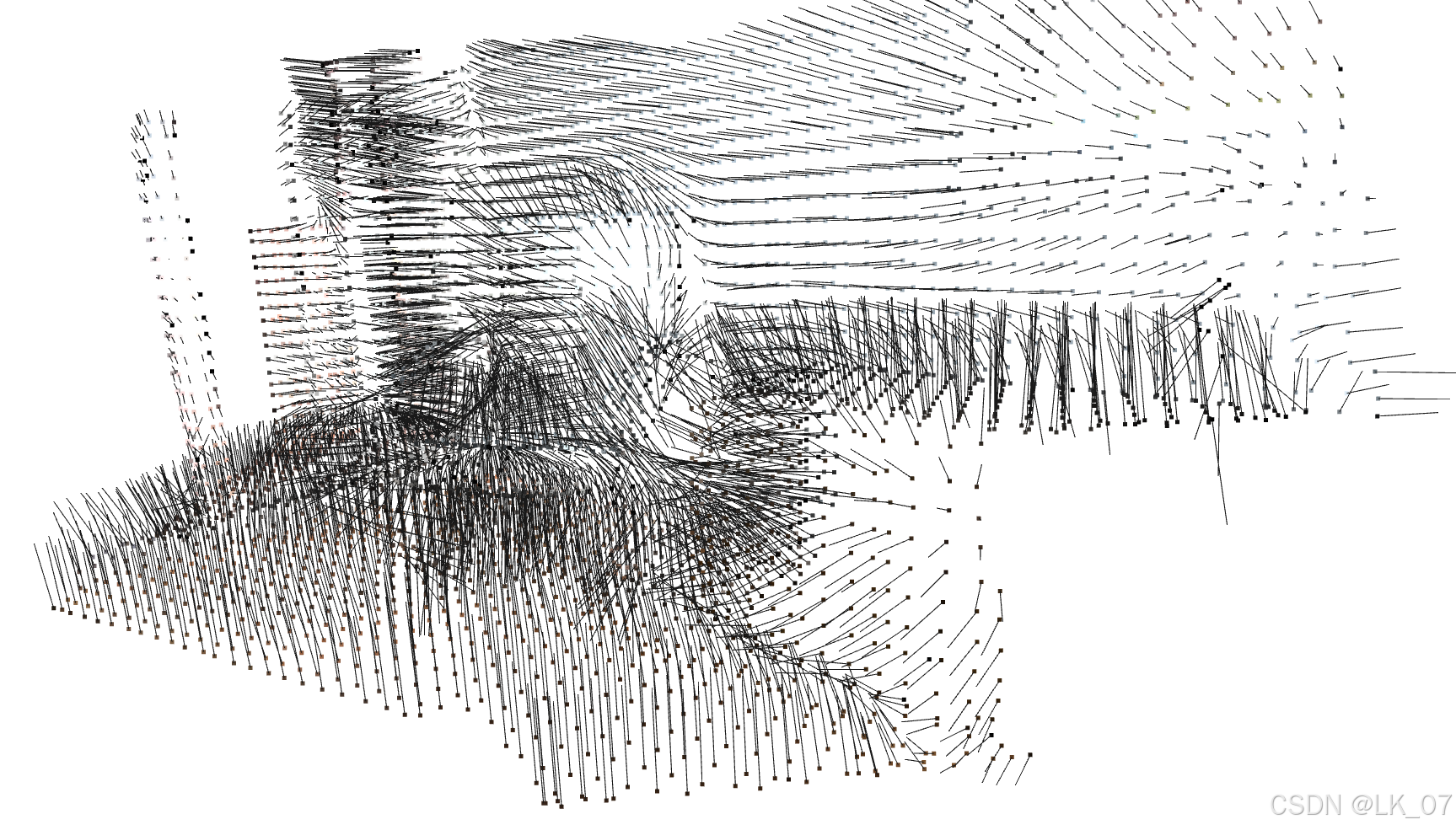
实际发现,若邻域范围或最大邻点数太小时,法向量会因 局部信息不足 而不稳定,局部性过强;只有当参数足够大,能覆盖足够多的邻点,法向量才能更准确反映表面整体趋势。
但是范围和点数也不是越大越好,像是官方文档里说的还需要考虑时间的问题,当你的数据量非常之大时,选取合适的范围和点数也是很重要的。
4. 补充:访问顶点法向量
在完成法向量估计后,我们可以直接访问点云中每个点的法向量数据,用于后续分析或自定义处理。
直接访问已完成法向量估计的 PointCloud 对象的 normals 属性就可以。
python
print(downpcd.normals[0])像是上面的代码打印了第一个点的法向量数据,输出如下,是一个三维坐标的形式。
0.85641574 0.01693013 -0.51600915
后记
感谢你能看到这,希望我的笔记能对你有帮助。
文章相关代码我已经放到了我的Gitee里了,有需要的可以自取Open3D点云笔记。
我还在学习阶段,个人能力有限,文章难免有疏漏和差错,望指出。
上一篇【Open3D】Ch.2:点云体素下采样 | Python
下一篇写 裁剪点云数据。
参考资料
- 顶点法向估计
《三维点云处理》学习笔记(1):平面法向量估计
补充资料(可做了解):
网格顶点法向的计算(基于面平均方法)
网格顶点方向的计算(一种新的面积加权方法)
国内首次 | 山东大学交叉研究中心全新点云法向估计算法荣获SIGGRAPH最佳论文奖! - PCA
关于协方差和协方差矩阵 以及PCA - KD-Tree
KD-Tree原理详解
详解KDTree